Totankprosjektrapport
|
|
|
- Claus Thomassen
- 8 år siden
- Visninger:
Transkript
1 Høgkolen i Sør-Trønelag Totankprojektrapport Projektoppgave i Styreytemer 2AEL13H våren 2015 Gruppe 5 & 6 Emil Hatletveit Kritian Strøm Terje Magnu Sørenen Stian Berg Dyrne Snorre Vongraven Anrea Haugen Roy Kenneth Solvang Jørgen Norvik Aaen Anrea Stahl Rø Knut Mariu Røberg Frerik Løkken Michael-Alexaner Mcgrory

2 ii

3 Foror AH Alle tuenter ve automajonlinjen ve HiST gjennomfører i fjere emeter et tørre projekt i faget Styreytemer og Reguleringteknikk. Projektet har om henikt å gi tuentene trening i amarbei, rapportkriving og praktik problemløning, amt øke en faglige kompetanen ho alle involverte. I totankprojektet har gruppe 5 og 6 blitt lått ammen for å løe problemet å regulere nivået i begge tankene på tankriggen. I enne rapporten er et gitt en etaljert bekrivele av hvoran totankprojektet er blitt utført. Slik at et er mulig for en ingeniør eller tuent om kommer fra en lignene eller tilvarene utanningbakgrunn kal kunne fortå hvoran kommunikajonen og nivåreguleringen fungerer i vårt ytem. Rapporten betår av arbei utført i InTouch, ix-developer, Mater-PLS og Slave-PLS ene. Det er i tillegg bekrevet hvilke bonuoppgaver gruppene har valgt og hvoran e har blitt løt. iii

4 Sammenrag TMS Denne rapporten har om formål å okumentere totankprojektet, om er en el av projektoppgaven i faget tyreytemer og reguleringteknikk. Vi kal i løpet av ette projektet regulere to forkjellige varianter av væketanker, ført me en tank, og eretter me to tanker. Die tankene kal regulere ve hjelp av to PLS-er. Begge ie PLS-ene er tyrt av en treje PLS, om ogå er programmert i Gx Work2. Det kal i tillegg lage et brukergrenenitt båe på PC og på brukerpanel. Henikten me totankprojektet var å nivåregulere to væketanker ve hjelp av PLS-er. Hvoran ette er gjort er elt opp i flere elementer: - Betemme hvem om har anvar for en enkelte elen av projektet. - Velge ut et bete fra hver gruppe på PLS-program og HMI-grenenitt. - Programmering av PLS-er. - Utarbeiing av IX-panel og InTouch. - Det ble avluttet me at begge gruppene gjore en bonuoppgave hver. o Gruppe 5; IP-Kamera o Gruppe 6; Autotuning Vi har i tillegg oppatert nettiene om rapportene blir lagt ut på. Det er me en projekttyringel for begge gruppene, om ier hvoran projektet ble gjennomført. I projektyringelen er et ogå me en oppatert kurve for arbei i forhol til planlagt. Totankprojektet ble avluttet me emontrajon. Nivåreguleringen i ytemet ble funnet tilfretillene og brukergrenenittet brukervennlig, gruppene kan gjøre eg klar for innlevering av tikrift og projektpreentajon. iv

5 Innhol Foror AH iii Sammenrag TMS iv 1 Innlening Oppgavetekt TMS Definijoner TMS Projektmål AH Proemål Reultatmål 4 2 Teknik el PLS-programmer og regulatorinntillinger tank 1- EWH/KR/RS PLS-programmer Sprangrepon tank1, LV1 og LT Førteorenapprokimajon FOPDT (Firt orer plu ea time) Regulatorinntillinger for tank Hyteree IX-panel AR, TMS, JA Kravpeifikajoner Tag Utforming og eign InTouch Sening av verier IP Kamera Alarmer Definering av alarmer Sikkerhet Acce Level Bonuprojekt gruppe 5 IP-Kamera AR Oppett: Bonuprojekt gruppe 6 Autotuning PLS-koe SBD Betjening av autotuning i intouch KS 49 v

6 3 Projekttyring gruppe Deltagere Tibruk KR Projekttyring og amarbei AR & KR 52 4 Projekttyring gruppe Deltagere Tibruk TMS Projekttyring og kvalitetikring SV Staturapportering Stanarierte kjemaer Verjonkontroll Teter og jekkliter Projekttyring og amarbei SV & KS 56 5 Projekttyring totank AR & KR 57 6 Konklujon SV 58 7 Litteratur TMS 59 8 Velegg 60 vi

7 1 Innlening 1.1 Oppgavetekt TMS I enne elen av projektet kal vi bruke nivåregulering for å få ønket vækenivå i to tanker. Dette kal gjøre via regulatorer om er byg opp i to PLS-er. Du kal ha mulighet til å regulere nivået i tanken me P- eller PI-regulator. I tillegg til ette kal et være mulig å bruke foroverkopling fra fortyrrelen i tank 2. Foroverkoplingen kal kunne bruke om P-, D- eller PD-regulator. Du kal bruke pårag fra regulatoren til å tyre ventilene på innløpet. Om et er ti kal gruppene gjennomføre et bonuprojekt, er tår gruppene fritt til å velge mellom noen utvalgte oppgaver. For gruppe 5 ble bonuprojektet oppett av riggovervåking via et IP-Kamera, men gruppe 6 valgte autotuning om bonuoppgave. Figur 1 Overiktbile kobling mellom PLS-rig og tank-rig 1

8 1.2 Definijoner TMS AD/DA-omformer: Analog-Digital Digital-Analog, Elektrik kret om gjør om fra analog ignal til binære verier, og motatt. HMI: Human Machine Interface. Grenenittet om brukeren preentere for når han/hun kal bruke en atamakin for å utføre en oppgave. Brukergrenenittet er bare en el av et ataprogram (InTouch). It' Learning: Nettportal tatt i bruk av HiST hvor man kan legge ut filer og faginformajon. Matlab/Simulink: Program for programmering, brukt for moellering og imulering. GX Work2: Program for programmering av PLS. HiST: Høykolen i Sør-Trønelag. InTouch: Program for å kontruere brukergrenenittet for operatør på PC. ix Panel TA100: Operatørpanel fetet på PLS-rigg, me berøring og farge kjerm. PLS: Programmerbar Logik Styring. En atamakin me inn- og utganger om u kan koble eg på. Vi benytter to typer uner projektet to FX1N og en Q00. Samplingti: Tien mellom hver gang AD-omformeren gir et ignal binært ignal, fra et analogt ignal. Bit: Enhet for igital informajon. Kan ha verien 0 eller 1 (av/på), kan lagre en boolk veri. Kan behanle i grupper på 4 (kvartett K1), 8 (byte 1B), 16 (wor/ataor) og 32 (ouble wor). Boolk variable: Variabel om kan ha to verier 0 eller 1 (av/på). Bufferminne: Lagringte for igital informajon. I PLS-moulene er bufferminnet nummerert (D0), alle bufferminner inneholer 16 bit. I/O Input/Output: Innganger og utganger på atamakiner. LD/ FBD Laeriagram/Funkjonblokkiagram: Grafike programmeringpråk for PLS. IL Intrukjonlite: Tekt baert programmeringpråk for PLS. Minne: Ligningte for igital informajon. For ekempel 1-bit minneceller (M0) og 16-bit ataregiter (D0). POU: Program Organiation Unit, elprogram i GX Work2. Byg opp av for ekempel Laeriagram. Tag: Digital merkelapp. Bruke for å linke ataregiter, minneceller eller anre verier for å gi bere overikt i programmeringen. 2

9 Anti-aliaingfilter: Elektronik filter byg opp av operajonforterker, mottan og konenator. Filteret er et lavpafilter om vil ta bort høyfrekvent tøy for å hinre nefoling (uønkee lave frekvener på målingene om kyle ampling). Foroverkobling: En reguleringmetoe om legge til påraget for rakere kompenering av fortyrreler hvor u måler fortyrreler (kan ogå kombinere me matematik moell). Foroverkobling kombinere om regel me tilbakekoblingregulator (PID). Eventuelle feil i foroverkoblingen vil a kompenere av tilbakekoblingen. PI-regulator: Proporjonal- og Integral-regulator. Elektronik tyreenhet om u programmerer me en matematik algoritme me forkjellige operajoner. For å regulere proeen via påraget. PD-regulator: Proporjonal- og Derivat-regulator. Elektronik tyreenhet om u programmerer me en matematik algoritme me forkjellige operajoner. For å regulere proeen via påraget. 3
. Eventuelle feil i foroverkoblingen vil a kompenere av tilbakekoblingen. PI-regulator: Proporjonal- og Integral-regulator.")
10 1.3 Projektmål AH Proemål Gruppemelemmene kal: Få økt kunnkap og erfaring innenfor projektplanlegging og projekttyring. Få bere erfaring me gruppearbei, og ammen ørge for at projektgruppen reultatmål blir oppnå. Kunne krive goe rapporter og preentere innholet. Kunne anvene teorien fra e forkjellige elene av faget Styreytemer på et praktik problem Reultatmål Projektgruppene kal: Utarbeie og programmere regulator ytem i PLS Regulatoren kal programmere lik at en kal kunne bruke om P- og PI-regulator me rykkfri over gang ve bytte av regulatortype. Utarbeie og programmere et brukergrenenitt ve hjelp av InTouch(PC) og et operatørpanel av typen ix Panel TA100. Her kal proeen kunne overvåke og tyre etter gitte operatørpeifikajoner Lage et intuitivt brukergrenenitt me mulighet for forkjellig operatør innlogging. Kunne bruke autotuning på tank 1 til forlag for regulatorinntillinger. Bruke webkamera til å overvåke tankriggen. Levere fulltenig okumentajon av alt utført arbeiet. Levere alle rapporter innen levering frit. Sørge for at alle eltakerne er kjent me e forkjellige elene av projektet. Kunne reegjøre for framgang av projektet til veileer ve projektmøter. 4


11 2 Teknik el 2.1 PLS-programmer og regulatorinntillinger tank 1- EWH/KR/RS PLS-programmer Når vi kulle lå ammen regulatorprogrammene fra gruppe 5 og gruppe 6, ble vi enige om å begynne me å lage to felle liter for e to lavene. Dette gjore vi for å få en go og overiktlig plan over hvilke minneceller og ataor om ble brukt, og for å e hvilken informajon vi måtte kommuniere mellom lavene og materplsen. I figurene uner vie litene for lave 1 og lave 2 repektivt. Figur 2 Lite over minneceller og ataor til lave 1 5


12 Figur 3 Lite over minneceller og ataor til lave 2 Som figurene over vier, har vi en komplett overikt over minnecellene og ataorene om blir brukt til å ene bit-verier og tallverier opp og ne fra lavene. Her måtte vi ogå ta henyn til at e om jobbet me InTouch-programmet fikk en amme overikten, lik at e kunne ette opp tagliten riktig i OPC-erveren. Vi ble enige om at gruppe 5, me in regulator fra entanktprojektet, kulle regulere tank 1via lave 1, og at gruppe 6, me in regulator, kulle regulere tank 2 via lave 2. Vi valgte viere å bruke materprogrammet fra gruppe 5 om mal, og utviet ette til å gjele to regulatorprogrammer i hver in lave. Dette forenklet proeen, a vi i utgangpunktet ikke behøve å enre på mye annet enn areene og ataorene. Uner er vi at materprogrammet er å å i uenret fra entankprojektet, bortett fra enringene om er gjort i areeringene. I figurene om følger vie e reterene elene av materprogrammet. Som vi er er ie got okumentert gjennom kommentarfelter. Dette gjør programmet overiktlig og lett å ette eg inn i båe for gruppemelemmene fra begge gruppene, å vel om for veileere. 6


13 Figur 4 POU for lave 1 i materprogrammet Figur 5 POU for lave 2 i materprogrammet el 1 7


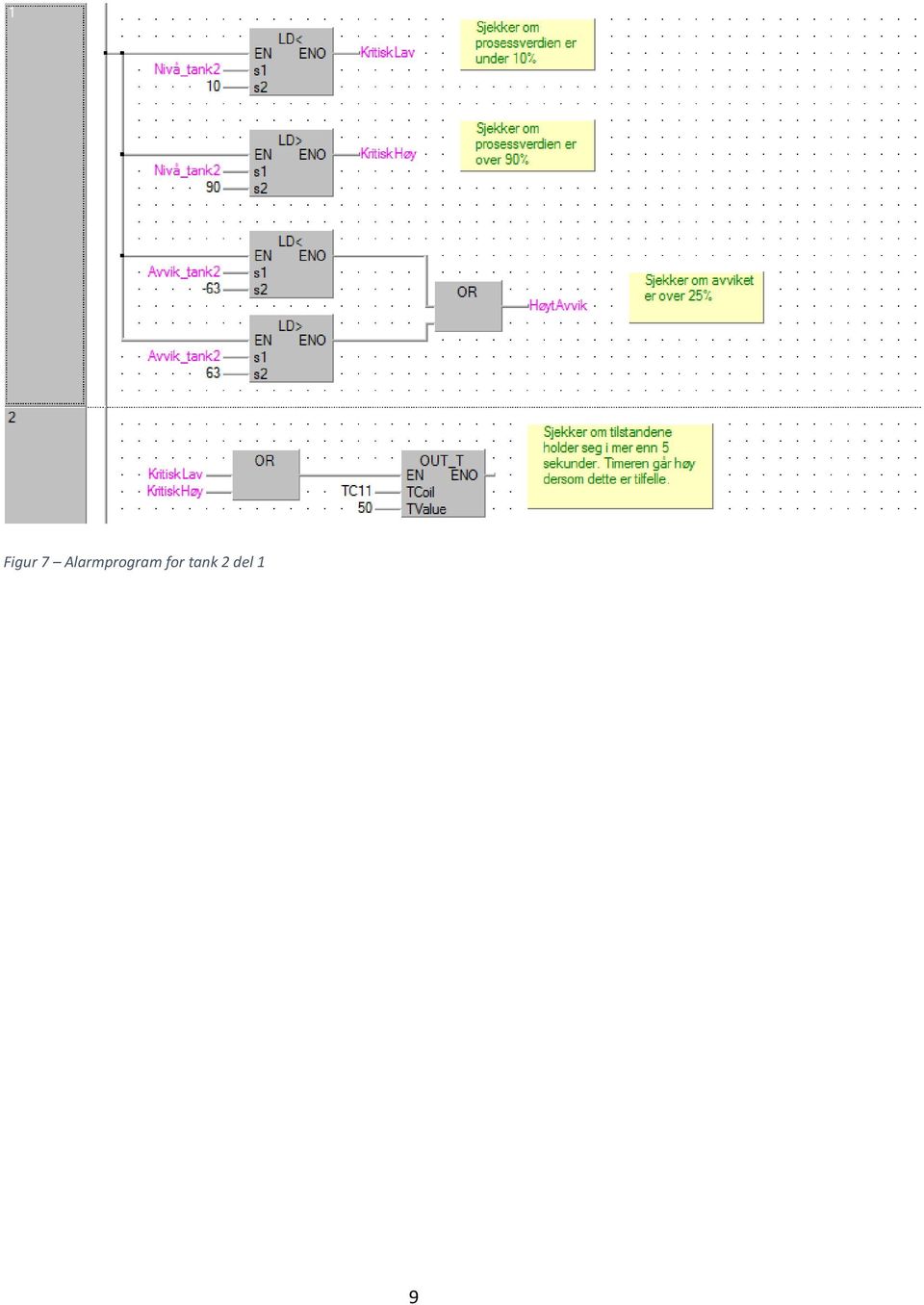
14 Figur 6 POU for lave 2 i materprogrammet el 2 Sett bort ifra ie enringene i mater-programmet, er et ikke gjort noen enringer i regulatorprogrammene. Die fungerer på akkurat amme måte om i entankprojektet, bortett fra at e nå tyrer hver in innløpventil til e to tankene. Den enete veentlige enringen om er gjort i laveprogrammene er alarmprogrammet. Dette måtte enre lik at alarmtiltaner fra begge tankene ble varlet me lyignal fra lampen på riggen. Dette løte vi ve å enre alarmprogrammene etter mal fra gruppe 6 itt program, lik at e ble lik for begge tankene. Deretter la vi e moifierte alarmprogrammene i lave 1, er lampen tyre fra. I bilene om følger er vi alarmprogrammet for tank 2, og hvilke funkjoner ette har. Dette er løt på nøyaktig amme måte for tank 1 og tank 2, å et er kun tatt me biler av et ene programmet. 8


15 Figur 7 Alarmprogram for tank 2 el 1 9

16 Figur 8 Alarmprogram for tank 2 el 2 10
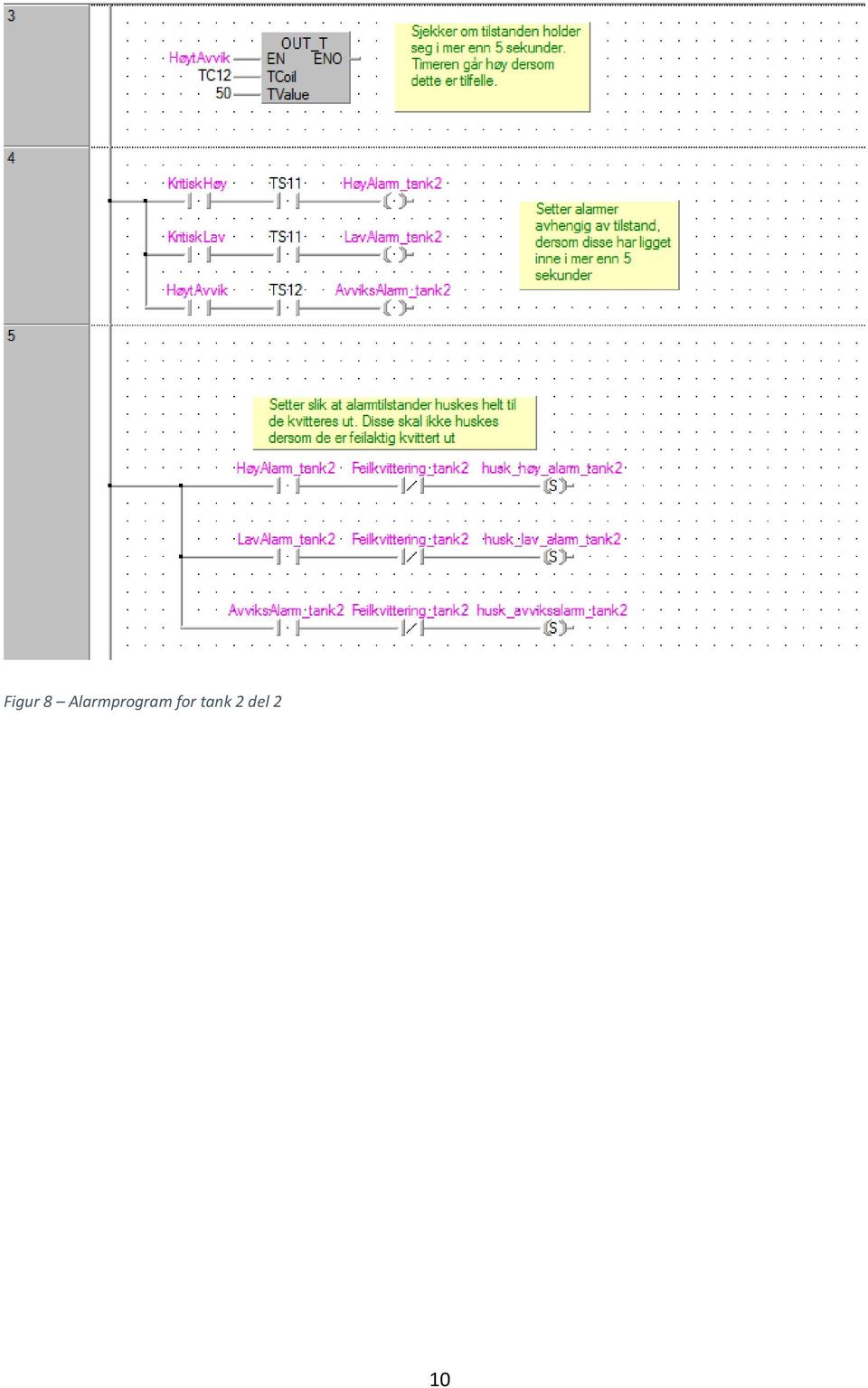

17 Figur 9 Alarmprogram for tank 2 el 3 Vi lage ogå en felle POU for alarmakjoner, om kulle ikre at begge programmene kulle fungere ammen og parallelt me hveranre. Her har vi blant annet lagt inn timere om tyrer blinkefrekvenen til alarmlampen ve e forkjellige alarmtiltanene i begge tankene. Vi har ogå lagt inn funkjonen me fat ly på alarmlampen ve en tåene kvittert alarm. Dette programmet vie i figurene neenfor. 11


18 Figur 10 POU for alarmakjoner el 1 Figur 11 POU for alarmakjoner el 2 12


19 Figur 12 POU for alarmakjoner el 3 Figur 13 POU for alarmakjoner el 4 Dette er en oppummering av enringene om er gjort i PLS-programmene, og et vier at et er neten ingen enringer på elve laveprogrammene. Go kommunikajon mellom gruppene har biratt til en miig omtilling fra regulering av en tank, til regulering av begge tankene amtiig. 13


20 2.1.2 Sprangrepon tank1, LV1 og LT1 Tank1 kal i totankprojektet regulere, utgangpunkt for reguleringparametre blir utregnet på grunnlag av FOPDT og ITAE kriteriet. Figur 14 Sprangrepon fra trenvinu i InTouch 14

21 2.1.3 Førteorenapprokimajon FOPDT (Firt orer plu ea time) Figur 15 Prinippkie FOPDT Figur 16 Målepunkt for FOPDT TC = 1 (t t 1 3 ) = 1 (33 22)ek = 15.7ek DT = t Tp = 22ek ek = 15.72ek PG = Δy = 1, er y er nivåenring og x er prangenring Δx 15
22 Figur 17 ITAE tabell Parametre for PI-regulator beregnet for fortyrreler i utløp: P= ( ) = I = ( ) = Parametre for PI-regulator beregnet for fortyrreler i referanen: P= ( ) = I = ( ) =

23 2.1.3 Regulatorinntillinger for tank 2 Her beluttet vi å gjøre nye utregninger for regulatorinntillingene til tank 2. I entankprojektet brukte vi frekvenanalye til å finne regulatorinntillingene, men vi enne gang beluttet å bruke FOPDT, me ITAE-kriteriet. Her er et ogå intereant å e om et blir noen tore ifferaner i reultatet i forhol til frekvenanalyen, og om reultatet blir bere eller verre. Ført tar vi utgangpunkt i enne prangreponen ve prang i referanen: Figur 18 Sprangrepon på tank 2 17
24 Her gjør vi en amme operajonen om i forrige avnitt, og vi bruker FOPDT-tilnærming. Figur 19 Målepunkt for FOPDT TC = (t2 3 t1 ) = 1 (12.5 5)ek = 10.7ek DT = t1 3 PG = Δy Δx = 1 0.4Tp = 5ek ek = 0.72ek Parametere for PI-regulator beregnet ve prang i referane: Kp= ( ) = 7.7 Ti = ( ) = 4.4 Ve teting av ie parameterne, vier et eg at e fungerer bra. Båe Kp og Ti er vært lik en vi regnet ut i imnotatet i entankprojektet. Følgelig blir innvigningforløpet velig bra me ie intillingene. 18
25 2.1.4 Hyteree Innløpventilen LV1 på tank 1 har vit eg å være litt vankelig å regulere på grunn av hyteree. Derfor mener vi et er viktig å krive ett lite notat om akkurat enne problematikken. «Hyteree, et fenomen at en tiltanenring om følge av en ytre påvirkning ikke forvinner når påvirkningen fjerne, men ført etter at en motatt rettet påvirkning har virket me en vi tyrke.» (Jakob Santa, ) For ventilen betyr et at vi ikke får reakjon umielbart erom ventilpåraget enrer retning. Hytereen i ventilen kyle muligen variajon i frikjonkrefter (tatik frikjon og gliefrikjon). Når ventilen tår i ro vil vi få tatik frikjon om er tørre enn gliefrikjonen. For å få bevegele i ventilen treng et litt ektra krefter (pårag) for å overvinne en tatike frikjonkraften. Når vi tilfører tiltrekkelig kraft vil vi få bevegele. Etterom gliefrikjonen gir minre mottan vil vi oppleve overving. 19
26 Dette reulterer i to problemer: 1. Enringen i ventilåpning tar ti. 2. Vi får for mye pårag, erom retningen på ventilåpningen enre. Dette reulterer i en treg regulering av proeen. Frikjonkreftene tror vi elvi kyle avleiringer og litaje i ventilen, mitanken er på grunnlag av forurenet vann og mitanke om lite velikehol. Figur 20 Prinippkie av ventil Hyterei i normally caue by the force that appear every time the valve tem i going to be revere, ie move in a irection oppoite to the previou irection of movement. Valve expert have ecribe tatic frictional force a the amount of force neee to ben the en-fibre of the packing material in contact with the valve tem in the new irection of motion. Once the tatic frictional force ha been overcome by energy provie by the motive power of the actuator an the tem actually tart moving, the tatic friction force iappear an i replace by a liing frictional force which i very much le than the original tatic friction Subequent equal movement of the valve tem in the ame irection will then generally be greater a the tatic friction ha now iappeare, an all the energy prouce in the actuator now goe irectly into moving the valve tem. It only reappear again on the next valve reveral. Any eaban (mechanical play or backlah) in the mechanim of the valve, actuator an poitioner combination, a to the hyterei effect when revering the valve. Hyterei an eaban increae control variance. In the cae of elf regulating procee they increae the time that the controller nee to make correction for a loa iturbance or 20
27 etpoint change, becaue every time the controller ha to revere the valve, the controller ha to move the PD (controller output), through the full hyterei range before the valve will move in the oppoite irection. A thi movement of the PD i performe at the integral term ramp rate, which get le an hence lower, the cloer the PV get to etpoint, it can take a very long time for the proce to finally actually ettle out at etpoint. (Michael Brown Control Engineering, ) Det går an å måle en hytereeproent, ette gjøre ve å kjøre prang i referanen en ene veien, f.ek fra 50% til 40% eretter fra 40%til 50% igjen. Hytereen vil a vie om offet på aktuatoren i forhol til ventilpåraget. Proeen må elvfølgelig gjenta for å få mer nøyaktig reultat. I følge Michael Brown Control Engineering er hyteree inntil 1% er akeptabelt, erom hytereen blir tørre må et gjøre tiltak, evt. kifte ventil. I totankprojektet fant vi ikke ti til å gjøre ie målingene, vi fant heller ingen måte å hanke me hytereen på bortett fra tiltakene nevnt tiligere. 21
28 2.2 IX-panel AR, TMS, JA Kravpeifikajoner Oppgaven ga noen peifikke krav til hva om måtte være me på panelet. Kravene er vit i tabell 1. Variable Skrive Lee Referane til tank 1 X X Referane til tank 2 X X Manuelt pårag til tank 1 X X Manuelt pårag til tank 2 X X Omtilling fra manuelt pårag til automatik X X nivåregulering for tank 1 Omtilling fra manuelt pårag til automatik X X nivåregulering for tank 2 Pårag for tank 1 X Pårag for tank 2 X Nivå i tank 1 X Nivå i tank 2 X Meling om alarmer fra tank 1 X Meling om alarmer fra tank 2 X Kvittering av alarmer fra tank 1 X Kvittering av alarmer fra tank 2 X Start/topp pumpe X Tabell 1 - Tabell om vier ønkee krive- og leerrettigheter for operatørpanelet X Det er ogå lik at et kal være mulig å tyre panelet fra weberveren. 22
. Dette er u uner «Contoller».")
29 2.2.2 Tag De veriene vi ønker å ette og lee ho PLS-ene må legge inn om tag i ix Developer. Dette gir tag liten vit i figur 21. Vi kriver irekte areen på et minnet vi ønker å lee/krive til PLS-en.. Figur 21 Taglite IX-panel I tag liten er man ogå areen og atatypen om er brukt i Mater PLS-en (Melec Q00). Dette er u uner «Contoller». Uner «Tag» feltet er man navnet på taggen internt i programmet og atatypen et kal behanle om. Når vi nå har att opp e objektene vi ønker å benytte på panelet må vi knytte e opp mot tiltenkte funkjoner. Vi gjør ette ve å velge hvilken tag objektet kal knytte til og funkjonen til tagen. 23

30 2.2.3 Utforming og eign Sien operatørpanelet er ganke lite ble et betemt at vi kulle lage et overiktbile for e to tankene, me bare en viktigte informajonen. Om man ønker å e me etaljert må man på menylinjen neert på kjermen velge hvilken tillegginformajon om er ønkelig. Figur 22 Overiktbile operatørpanel Om u velger tank 1 på menylinja på overiktbilet vil u få opp ette vinuet. Hvor u har mulighet til å gjøre alle inntillinger for tank 1 amt komme eg til alarmoverikten, trenvinuet for tank 1 og hjelpe funkjonen. Figur 23 Operatørie for tank 1 IX-panel 24
31 Du har mulighet får å få opp et trenvinu for hver av tankene på IX-panelet. I Trenvinuet får u tegnet, påraget, referane og nivå. Figur 24 Trenvinu IX-panel Det er mulighet å få fram et hjelpvinu fra alle ier ette vil e lik ut: Figur 25 Hjelpvinu IX-panel 25

32 Det er peifikt att krav til hvoran alarmene kal fungere. Det er laget en alarmlampe om lyer på alle kjermer, men u må til alarmvinuet for å kunne kvittere alarmene. Det er lagt til et alarmly for alarmer om blir kvittert i alarmtiltan om vil lye til u er ute av tiltanen igjen. Figur 26 Alarmvinu IX-panel 26
33 2.3 InTouch Når begge tankene kulle tyre ble et laget ett nytt grenenitt i intouch, betåene av e bete elementene fra begge gruppene. Figurer for tanker, ventiler og lignene kommer fra gruppe 5, men felt for regulatorinntillinger ble hentet fra gruppe 6. Virkemåte er tort ett lik om i gruppe 5 itt entankprojekt. På amme måte om i entankprojektet kal et ogå være mulighet for å logge inn om tre forkjellige operatører, om har forkjellig gra av mulighet for tyring av e forkjellige parameterne. Se entankrapport for mer etaljert informajon om reirkulerte funkjoner. Grenenittet inneholer nå ogå mulighet for å aktivere bonuoppgaver. Gruppe 5 har laget kameraovervåkning, om finne i hovemenyen. Gruppe 6 har laget autotuning av in regulator, om regulerer tank 2, enne aktivere fra vinuet for regulatorinntillinger. For å få frem all informajon å ryig og overiktlig om mulig fant vi ut at vi kulle benytte o av begge kjermene vi hae til råighet. Vi ente opp me elve proeen og menyen på en ene, og grafer og alarmlite på en anre. Ve tarten av totank projektet måtte et lage et nytt brukergrenenitt, et kulle utvie til to tanker iteenfor en. Vi lo ammen noen fra hver gruppe og plukket ut et bete fra begge projekter, om vi atte ammen til et nytt brukergrenenitt me to tanker. I InTouch er et laget et paene brukergrenenitt om kal imulere proeen om kjer på tankriggen. Det er att opp et hovevinu og flere «unervinuer» om kal åpne etter hvilken knapp en trykker på. Hovevinuet inneholer pumpa, to ventiler, to tanker, tre magnetventiler på utgangen av tank nummer 2, en ventil uner tank nummer 1, foroverkobling, nivåmålere, flowmåler, et trenvinu om grafik vier nivået for hver av e to tankene, referanen i tankene og ventilpåraget, en lite over alarmer, en meny me knapper om åpner forkjellige vinuer. Øvert til høyre i vinuet på en ene kjermen kan operatøren e hvem om er logget inn, et iplay me ti og ato og en knapp for å logge ut. 27

34 Figur 27 Hovevinu I figuren vie hovevinuet av brukergrenenittet hvor en har mulighet til å kontrollere proeen. I hovevinuet kan man klikke eg inn på forkjellige ruter for å enre parametere, om referane, Kp, Ti, valg mellom P-regulator og PI-regulator og valg mellom irekte og reverert regulering. I figuren er vi tankene fra hovevinuet. Her kan vi e at et er nivået i tankene om vie i e blå øylene til ventre i tankene. Når InTouch koble opp mot OPC Beijer og tankriggen, vil ette nivået følge et reelle nivået i tanken. Nivået vil være ganke nøyaktig et amme vit i InTouch om et er i tanken. Den røe treken om vie i figuren er referanen att i InTouch eller i IX-panelet. Det er att inn to liere, i form av trekantene om inneholer en proentveri om vier proentverien for referanen att i tankene. For brukeren me met tilgang vil lierene være funkjonell og et vil a være mulig å enre referanen ve hjelp av enne, uten å måtte klikke eg inn på parametervinuene. 28

35 Figur 28 Tren i hovevinu I hovevinuet er et vit tre trenvinuer. Her kan vi lee og ha full kontroll på hvoran proeene i tankene fungerer. Den røe linjen er for referanen, en blå er for nivået i tanken og en grønne linjen er for ventilpåraget. Her kan vi e hvoran proeene oppfører eg over en gitt tiperioe. På x-aken vie trenvinuet over e ite 2 minuttene, ette gjør a at hver av e fire rutene om vie i figuren tilvarer 30 ekuner. Det er laget et eget vinu om heter Tren 1 og Tren 2 er en kan e proeene for e to tankene over e ite 10 minuttene. Figur 29 Parameterknapper 29

36 For å enre parameterne til proeen er et opprettet to knapper i hovevinuet for hver av e to tankene, om åpner et nytt vinu er en kan velge e forkjellige veriene for Kp, Ti og lignene. Her har et i totank elen blitt laget to ientike knapper for parameterinntillingene. De er blitt navngitt om LIC1 og LIC2. Die knappene fungerer om forklart i entankrapporten, for gruppe 5, på ie 69. Figur 30 Innlogging I InTouch er et laget et verktøy for innlogging, hvor forkjellige brukere har tilgang til å ette og lee for ekempel om regulatoren tår i P- eller PI-regulering. Dette gjeler for begge parameterknappene. I figuren kan vi klikke på knappene for parametere for å å komme inn til valg av parametere. Man kan her lee hvilken tiltan regulatoren tår i, altå om regulatoren tår i P- eller PI-regulering og om en tår i auto eller manuell. Inne i parametervinuene kan en av operatørene enre på om regulatoren kal tå i P- eller PIregulering og to av operatørene kan velge om regulatoren kal tå i manuell eller auto regulering. I figuren kan ogå operatørene lee referanen og påraget i tankene uner reguleringen. 30

37 Figur 31 Parametervinuer I figuren er vi vinuene for parameterinntillinger. Her kan vi ette parameterne for regulatorene. Når ette bile vie kan vi e at et er flere knapper i vinuene. Her kan vi velge at regulatorene kal ha irekte eller reverert regulering. På ette bile er vi at begge regulatorene tår i auto me PI-regulering. Måten ette er att opp på er forklart i entankrapporten, for gruppe 5, på ie 77. Figur 32 Manuellparametere Dette er vinuet for manuellparametere. Her kan vi e e parameterne om kan enre når regulatorene tår i manuell. Ve å ette regulatorene i manuell kan en tyre ventilene manuelt lik at teting av reguleringen kan enklere gjennomføre. Ve å trykke knappen om heter Auto vil en ette regulatoren tilbake til automatik regulering. Når regulatorene går fra manuell til auto vil regulatorene gå til en tiligere tiltanen en hae før manuellregulering ble valgt. Det er laget en funkjon i PLSen om gjør ette mulig. 31

38 Scriptene i et nye brukergrenenittet er litt enret, om for ekempel for parametervinuene. Da vi lo o ammen me gruppe 6 fant vi ut at e hae multipliert veriene av Kp og Ti på en enklere måte. Så vi valgte erfor å bruke ere måte. Hvor e ikke brukte cript, men enret ette irekte i tagen. Dette er vit i figuren uner. For foroverkoblingen ble vi enig i å bruke et om ble gjort for gruppe 5 i entankrapporten. Dette er knappen for foroverkobling. Denne fungerer om en knapp i likhet me parameterknappen. Her er et ogå mulig å lee veriene for Kp_FF og TD_FF. Ve å trykke på enne knappen blir man ent viere til vinuet for foroverkobling. Figur 33 Foroverkoblingknapp Figur 34 Foroverkoblingparametere 32

39 Her er et muligheter for å aktivere foroverkobling. Dette er kun mulig for en ene tanken, et er for tank to. Ve å klikke på e forkjellige knappene for regulering nee til ventre i figuren, ette en type foroverkobling om velge. Her gjeler et amme for ening av ie veriene om i parametervinuet. Det ene puler ne til PLSen om ener tilbakemeling om type valgt foroverkobling. På ette bilet er et valgt foroverkobling av typen Dff regulering. Her kan u ogå enre parameterne i en øvre elen av vinuet. Foroverkoblingen vil bli eaktivert enten ve å trykke på All Off knappen nee til ventre i figuren og ve å velge P- eller PI-regulering. Det kal lage hitorike trener lik at operatøren om nå logger eg inn på nete kift kan e hvoran et har gått e ite 10 minuttene i e to tankene. Her vil man kunne e om et har vært noen enringer i prang eller forkjell i nivåene. Det er fullt mulig å enre hvor langt tilbake man ønker å e. Dette gjøre ve å trykke på trenvinuet. Det vil a åpne eg en meny. Uner Chart Length kan man velge hvor langt tilbake man kan e i trenvinuene. Det er laget et trenvinu for hver av tankene. I hovevinuet er vi at et er to knapper om henholvi heter Tren 1 og Tren 2, et er ie man trykker på for å få åpnet vinuene for trenviningen. Det er ogå mulighet for å lagre trenvinuet. Dette gjøre ve å trykke neert på vinuet er et tår ave to file. Hvi man ønker å benytte en annen lagringpla enn et om er oppgitt kan man trykke på Filename og ene filen it man ønker. I figurene uner vie e to hitorike trenene, Hitorik tren1 og Hitorik tren2. Figur 35 Hitorik tren 1 33

40 Figur 36 Hitorik tren Sening av verier For at tankene kal fungere på en ufortyrret måte fra entankprojektet ammen me bonuoppgaven har vi valgt Sening av verier ne til PLS-ene foregår på forkjellige måter fra tank-1 og tank-2. Dette er fori at ve noen tilfeller ønker vi kun å ene puler og ve anre tilfeller ønker vi å ene fate verier. Ve for ekempel etting av tanken bruker vi funkjonen toggle om ener verien TRUE eller FALSE kontant. Ve anre tilfeller ener vi en pul om etter verien høy en gang, eller holer en eg lav. Dette gjøre ve for ekempel om tanken kal tå om P- eller PI-regulator. Figur 37 Pulening av verier. ener høy veri en gang 34
41 Ve at vi ener puler ne til PLS-en trenger vi ogå en tilbakemeling fra lave-enhetene om bekrefter at verien har blitt att. Derme har vi en tag om ener verier ne til PLSene og en veri om mottar fra PLS-ene inn til InTouch. Ve å ene verier på enne måten får vi en bekreftele på at verien har faktik blitt att i lave-pls-ene. Derme har vi full kontroll på tiltanen til riggen IP Kamera Når et gjeler bonuoppgaven har vi att opp et IP kamera om kal vie båe på nettien og i InTouch. (For oppett av elve IP kamera e kapittel 2.4). For oppett av IP kamera i InTouch har vi valgt å ette et inn i et nytt vinu om er tilgengelig fra Hovevinuet. I ette vinuet krever InTouch at vi etter inn en ektra ActiveX kontroll om kan åpne nettleeren til IP kamera. Før vi kan ette inn IP kamera krever InTouch at vi intallerer en nettleer om kan åpne programmet til IP kameraet. Ført må vi klikke inn på Special / Configure / Wizar/ActiveX Intallation. Velg å ActiveX Control Intalltion tabben øvert. Uner menyen Available ActiveX control blar vi o ne til Microoft Web Brower og trykker Intall. Microoft Web Brower kal nå være i menyen Intalle ActiveX control. Vi har nå muligheten til en nettleer i InTouch. Denne ligger inne på wizar election / activex Control / Explorer. Denne etter vi i et vinuet vi ønker å ha IP kameraet vårt. 35


42 Figur 38 Vining av IP kamera i InTouch Det enete om mangler for å få nettien til IP kameraet er vinucriptet til IP kamera. I cript vinuet trykker u på inert / ActiveX velg Explorer1 og navigate. I paranteen etter ette areen til IP kameraet om vit på figuren uner. Oppettet er nå ferig og kal ha tilgang til å e og tyre IP kamera fra InTouch. Figur 39 Scriptet til IP kamera i Intouch 36
43 2.3.3 Alarmer Alarmer er en avarel at en proe har overteget in normaltiltan og krever operatøren oppmerkomhet og hanling. En alarm kal bli att når en proeveri overtiger en brukerefinerte grenen. I vårt tilfelle er et to krav til alarmer. Det kal være en avvikalarm og to grenealarmer. Det kal gå en alarm erom nivået avviker mer enn 25% fra referanen (25% av totalt måleområe.) Grenealarmer kal aktivere erom nivået i tanken overtiger 90% eller går uner 10% Definering av alarmer For at vi kal lettere gjenkjenne alarmene kan vi efinere e forkjellige alarmtypene. ve kritik alarm har vi to forkjellige alarmer. En når alarmen kritik høy og kritik lav. For å e forkjell på ie kan vi ette alarmtiltan kritik_hh når nivået i tanken når 90%, Kritik_LL når nivået er uner 10% og kritik_avvik når avviket overtiger me 25% i forhol til referanen. Det er ogå att opp noen ektra alarmer utenom kravet til oppgaven og ie blir efinert ve bufeil, trømbru, lavt_batteri ov. Se Tabellen uner for å e en fulle alarmoverikten Tabell 1 alarmlite i InTouch ALARM ADRESSE ALARMVERDI FORKLARING ALARM_LAV_T2 M54 10 Kritik lavt nivå i tank 2, minre enn 10% ALARM_HOY_T2 M53 90 Kritik høyt nivå i tank 2, tørre enn 90% ALARM_AVVIK_T2 M55 25 Nivå avvik tørre enn 25% fra referanen i tank 2 ALARM_AVVIK_T1 M52 25 Nivå avvik tørre enn 25% fra referanen i tank 1 ALARM_LAV_T1 M51 10 Kritik lavt nivå i tank 1, minre enn 10% ALARM_HOY_T1 M50 90 Kritik høyt nivå i tank 1, tørre enn 90% Bufeil M0 TRUE (1) Mitet tilkobling til lave 1 og 2 Lav_batteri_QPLS M1 TRUE (1) Lavt batteri i Q-PLS Kritik_lavt_QPLS M2 TRUE (1) Kritik lavt batteri i Q-PLS 37
44 2.3.5 Sikkerhet Det kal lage et vinu er operatøren må logge eg inn me eget brukernavn og paor. Til programmet vi bruker er et opprettet tre brukernavn OPERATØR1, OPERATØR2 og OPERATØR3 er operatør 3 har alle rettigheter men e to anre operatørene har mer begrenet rettighet. Paorene til e forkjellige brukerne er Op1, Op2 og Op3. For opretting av brukere e ie 84 på entankprojektet til gruppe 5. Tabell 2 Tabelloverikt av e tre brukerne, paor og tilgangnivå Uer name Pawor Acce Level OPERATØR1 Op OPERATØR2 Op OPERATØR3 Op For en bere bekrivele av innloggingien e ie 86 av entankprojektet til gruppe 5. 38

45 2.3.6 Acce Level Før vi oppretter brukerkontoer må vi betemme hva lag ikkerhet vi ønker å bruke. InTouch har muligheten til å begrene tilgangen til innloggee brukere avhengig av hvilket tilgangnivå e har. Dette er mellom , hvor 0 er lavet og 9999 er høyet (tilgang til alt.) Tilgangnivået er taggen om bruke til å ikre InTouch applikajonene. Det er hoveytemet om en bruker kan eller kan ikke gjøre i Runtime. For ekempel kan ikke vil vi ikke at OPERATØR1 kal e et objekt kan vi krive følgene i en Viibility link, $AcceLevel >=3000. Nå vil kun brukere me Acce level lik 3000 eller høyere få tilgang til ette objektet. I vårt tilfelle blir et a OP2 og OP3. For en full overikt av hvem om har tilgang til hva i InTouch e velegg nr. 1. Figurene uner er et ekempel på hvoran parametervinuet vil e ut for e tre operatørene. Figur 41 Parameterviing for OP1 Figur 40 - Parameterviing for OP2 og 3 For en mer utfyllene bekrivele av tilgangnivåene e ie 85 på entankprojektet til gruppe 5. 39
46 2.4 Bonuprojekt gruppe 5 IP-Kamera AR Som en bonuoppgave i ette projektet har vi mulighet til å ta i bruk et IP-kamera om kan fjerntyre over internett. Teknik info: SONY RZ30P 25 x optik zoom 340 graer rotering Innebyg weberver for fjerntyring 10/100 MB ethernet-tilkobling. Sony-RZ30P IP-kamera Figur 42 IP-kamera Kameraet er byg inn i hjemmeien til projektet i tillegg til at et ble benyttet om en el av brukergrenenittet i InTouch Oppett: Kameraet er tilkoblet nettverket via en tråløe routeren. Ve førte gang tilkobling vil kameraet automatik få en IP-aree. Denne kan man finne ve å logge inn på routeren og e tilkoblete klienter. 40
47 Man kan koble til kamera ve hjelp av IP-kamera programvare eller man kan bruke en nettleer. Man vil a få valget mellom flere typer viewer hvor kompatibiliteten avhenger av typen nettleer og atamakinen man bruker. Uner er vi Java-viewer i bruk. Man kan kontrollere kameraet ve bruk av panelet ve ien av. Figur 43 Webkameragrenenitt i nettleer 41

48 For at man kal kunne nå kameraet over internett, må vi ette en port til kameraet om må portforware. Stanarporten til kameraet er 80. Det er enne vi må enre. Figur 44 Inntilling av HTTP-port i webkamera Man finner inntillingene i Setting Network. Over er vi at HTTP porten er enret til I routeren er et lagt opp lik at man finner kameraet over internett ve å krive i en nettleer. 42

49 2.5 Bonuprojekt gruppe 6 Autotuning PLS-koe SBD Bonuoppgaven vår går ut på å lage ei autotuning for regulatoren vår. Autotuning fungerer om en av- og på-regulator, hvor verier fra vingningene måle, og eretter benytte ie til å komme me et forlag til Kp og Ti parametere om vil gi et guntig innvingningforløp. En av og på regulator kal gi mak pårag erom proeverien er uner referanen, og minimum pårag erom proeverien er over referanen. I vår regulator blir ette 255 erom proeverien er uner referanen, og 0 erom proeverien er over referanen. Programmet jekker for ette ve å e på fortegnet på avviket. Derom avviket er poitivt er proeverien uner referanen, og erom et er negativt er proeverien over referanen. I tillegg til ette ønker vi måling på perioeti, topp- og bunnpunkt. Vi finner toppunkt me å ammenligne aktuelt nivå me forrige nivå. Derom forrige nivå er høyere enn aktuelt nivå, og nivået er over referanen, er et forrige nivået et toppunkt. Derom et forrige nivået er lavere enn et aktuelle nivået, og nivået ligger uner referanen, er et forrige nivået et bunnpunkt. Dette gjeler bare en gang hver halvperioe, etterom nivået vil være tigene eller ynkene etter bunn- og toppunktet. Perioetien måle ve å telle opp hvert 0.1 ekun. Dette gir 10*perioeti, men vi bruker enne for ei mer nøyaktig måling. Figur 45 Samlig av måleverier for vigningene (autotuning) 43

50 Perioetien, og begge e benyttee tellerne må nulltille ve hver nye perioe. I ette programmet har vi valgt å efinere en perioe til hver gang proeverien kommer over referanen, til nete gang proeverien kommer over referanen. Det ene erfor en pul om markerer ny perioe hver gang avviket går fra poitivt til negativt. Ve amme tipunkt kal antall perioer om har gått telle opp. Figur 46 Start av ny perioe for vigninger 44

51 Programmet kal regne ut parametere baert på verier fra tåene vingninger. Vi kan finne tåene vingninger ve å ammenligne aktuelle verier for perioeti, topp- og bunnpunkt, me e forrige veriene. Derom aktuelle verier og forrige verier er like, har vi oppnå tåene vingninger, og et er på tie å tarte utregningen. Figur 47 Sammeligner forrje veri me nåveri for å e om et er tåene vigninger Etterom vi kun ampler ata ve vie amplingintervall, blir enne ammenligningen unøyaktig. Sammenligningen må være nøyaktig på bit-verier, og vi riikerer a at programmet alri finner punktet me tåene vingninger. Programmet vil a alri gå inn i utregningelen. Vi har erfor valgt en annen løning for å gå runt ette. Vi bruker a variabelen om teller antall perioer, og etter ei grene på hvor mange perioer om kal kjøre før programmet tarter utregningen. Vi kunne att enne grenen til hva om helt, men vi gjør et anlag og antar at vi har oppnå tåene vingninger etter 7 perioer. Erfaring fra tiligere forøk vi har gjort me autotuning vier at ytemet kal være got innenfor tåene vingninger i løpet av 7 perioer. Figur 48 Sjekker om et har gått 7 perioer ien tart av autotuning 45

52 Vi ønker ogå å e hvor tor fremgang autotuningen har, altå hvor mange proent ferig en er. Dette kjører en ammenligning på antall perioer om har kjørt, og antall perioer om kal kjøre, og varer krive ut om et tall i proent, Figur 49 Måler hvor langt autotuning har kommet Etter ette krive e 16-bit målte veriene over til 32-bit ataor på amme måte om i entankprojektet figur 16. Deretter benytte algoritmene for utregning av kritik forterkning (Kk) og 1.27 topp til bunn for pårag kritik perioeti (Tk). K k = = I vårt topp til bunn for proeveri topp til bunn for proeveri ytem er topp-til-bunn for pårag en kontant. Og vi kan a ette telleren om en kontant. Etterom programmet ikke takler eimaltall må vi benytte 127 iteenfor Kontanten blir a T k = perioeti for vingningene. Vi benytter eretter Ziegler-Nichol tabell for å finne forlag til Kp og Ti. Etterom autotuning er en metoe om er beregnet på PID-regulatorer, blir et unøyaktig å benytte Ziegler-Nichol tabell for PI-regulator. Det blir a mer nøyaktig å tille inn regulatoren om om vi kulle hatt en D-el, men D-elen ette lik 0. Vi får a algoritmene K p = 0.65 K k og T i = 0.5 T k. Figur 50 Regner ut Kp og Ti utfra målte verier på Kk og Tk 46

53 De 32-bit ataorene krive eretter over til 16-bit ataor, på amme måte om i entankprojektet figur 19. Etter utregningene er ferige kal funkjonblokken gi et ignal om at autotuningen er ferig. Dette gjøre enkelt ve at variabelen for at programmet er ferig er avhengig av amme variabel om utregningene, og kal ligge etter utregningene i koen. Figur 51 Sener et ignal for når autotuningen er ferig Til lutt må enne funkjonblokken inkluere i reten av programmet. Dette ve at vi kaller på funkjonblokken om en lokal variabel i en POU, og funkjonblokken legge til me e parameterne vi kal bruke. Start av autotuningen kal kunne tyre fra mater, og autotuningen kal kru av eg elv når en har kjørt ferig. Verien på minnecelle M50 tyre fra mater, og enne får en poitiv pul når autotuning aktivere. Etterom vi ønker at autotuningen kal kjøre av eg elv etter ette, kal variabelen for autotuning bli att høy helt til en blir nulltilt. Derom autotuningen kal avbryte men en kjøre, ette M51 høy fra mater, og variabelen for kjøring av autotuning avlutte. Denne variabelen kal ogå nulltille når programmet har kjørt ferig. Figur 52 Vier hvoran autotuningen kjøre 47
54 For at autotuningen ikke kal få problemer erom en tarte men regulatoren tår om manuell regulator, må regulatortypen enre erom autotuningen kal tarte. Dette er fori referanen ette lik proeveri erom manuell mou er valgt, og vi kan a ikke kjøre utregninger me avviket. En enkel nulltillingfunkjon ette a i tarten av POUen for manuell mou. Etterom POUen for autotuning ligger etter POUen for manuell mou, kal manuell mou koble ut av amme knapp om autotuningen aktivere, eller erom autotuning alleree ligger aktiv. Figur 53 Sørger for at påraget tår i manuell uner autotuning 48

55 2.5.2 Betjening av autotuning i intouch KS Autotuninga betjene fra et helt eget, lite og enkelt vinu. For å få frem ette må u ført åpne vinuet for regulatoren, er er et nå lagt til en egen knapp. Figur 54 Vier hvoran u velger autotuning i InTouch Nå har u to valg, enten kan u tarte autotuninga, eller u kan lukke vinuet igjen. Figur 55 Vier hvoran forlaget til intillinger kommer ut Vi ville at et kulle vie en inikering på hvor lenge et er igjen til autotuninga er ferig, å et ble lagt til en utgang fra PLS om bruke til å betemme om vinuet kal vie veriene regulatoren har regnet ut, eller om et kal be eg om å vente. Når u trykker «tart» blir enne høy, og et vie en trek om blir grønn fra ventre mot høyre ammen me et tall om oppgir antall proent, i henhol til verien «Framgang» i PLS programmet. Figur 56 Vier tatu på autotuningen 49
56 3 Projekttyring gruppe Deltagere 50
57 3.2 Tibruk KR Her har vi timebruken gjennom hele projektet. Ser at vi ligger noe uner helt til etter påke. Fra påke ligger vi akkurat på etimert tibruk. Ser ogå at vi ligger en el timer uner etter uke 16. Vi begynte å få go kontroll på Entankprojektet, og et var rapportkriving om var i foku. Mener vi har etimer tiforbruket ganke bra. 51
58 3.3 Projekttyring og amarbei AR & KR Den 25/2 fikk vi utlevert projektoppgaven i faget «Styreytemer». Uner løning av projektet jobbet vi ammen i grupper, er to grupper kulle ele på én rigg. Det var a viktig å lage en plan på hvilken gruppe om kulle få jobbe me riggen, innelingen ble annenhver ag. Dette fungerte velig bra, me tanke på at vi ikke trengte tree me å bli ferig me riggen i tie. Et ukekriterie for å løe oppgaven på en go og effektiv måte er got amarbei. Det førte vi gjore var å få opprette et felle plan på «It Learning» om vi kalte «Projekt 2015». Her trukturerte vi projektet i e elprojektene om hele projektet beto av. Vi hae ogå et ytem på hva vi kulle gjøre når vi la ut et vi hae jobbet me på» It Learning». Det var viktig at ve reigering av noe om var lagt ut fikk kommentarer på hvem om hae reigert og når. På enne måten hae vi hele tien go kontroll på ite gjelene verjon. Uner arbei av hvert enkelt elprojekt hae vi internmøter om gruppeleer hae anvar for. Dette gjore vi for å oppatere hver enkelt i gruppen på framgangen i arbeipakkene vi jobbet me. På enne måten ørget vi for at vi jobbet mot amme mål lik at ammenying av hver enkelt arbeipakke gikk greit for eg. De to førte elprojektene, Forprojektet og Miniprojektet gikk velig greit. Die elprojektene var ganke må og i tillegg var e ikke å komplierte. De tørte utforringene kom uner Entankprojektet, om var et tørte elprojektet. Her elte vi gruppen i tre par er hvert enkel par hae in arbeipakke, InTouch og ix-panel, PLS og Filter. Selve arbeiet me arbeipakkene gikk velig greit. De om jobbet me InTouch og PLS prøve å jobbe parallelt, men et vite eg å være vankelig. Grunnen til ette kan være at vi ikke hae noe felle mål på hvoran vi ønket at et hele kulle fungere ammen, noe om vi bure gjort uner internmøtet. Dette reulterte i at vi hele tien måtte gjøre enringer for å tilpae o hveranre, noe om førte til at vi brukte mye unøig ti. Uner arbeiet fant vi til lutt ut av ette og atte o ne for å bli enige på hvoran et kulle fungere ammen. Vi ble til lutt velig fornøye me reultatet. 52
59 4 Projekttyring gruppe Deltagere Stian Berg Dyrne SBD Emil Wele Hatletveit EWH Kritian Strøm KS Terje Magnu Sørenen TMS Snorre Vongraven - SV Anrea Haugen AH Dato
60 4.2 Tibruk TMS Vi ligger noe uner et planlagte fori et tok mye kortere ti å kontruere filteret enn planlagt, vi nærmer o en planlagte verien igjen grunnen til ette er at et var noe mer arbei me amkjøring av programmene uner totankprojektet enn vi gjettet uner forprojektet. Vi la ogå inn litt færre timer på lutten lik at vi hae mer ti til råighet om vi lå litt bak kjema. Det må ie at vi har etimert bra, når vi kun fikk et avvik på ca 60 timer uner hele projektarbeiet Tibruk Planlagte timer Utført arbei 4.3 Projekttyring og kvalitetikring SV Projektet kal til enhver ti ha en leer. Leeren bytte hver uke, og ve projektet lutt kal hver enkelt gruppeeltaker ha fått prøv eg i jobben. Leeren er anvarlig for møteinnkalling, aklite og gjennomføring av et ukentlige møtet. Han vil ogå være anvarlig for projektet framgang, og tifriter Staturapportering Møteleer kal vær uke fremlegge en taturapport, om kal gjennomgå på projektmøtet. Møteinnkalleler, møtereferat og annen relevant okumentajon late opp til felle ropbox-mappe. 54
61 4.3.2 Stanarierte kjemaer Gruppen kal bruke tanarierte kjemaer for møteinnkalling, møtereferat, og arbeipakkekjema. Die ligger tilgjengelig på It Learning uner faget «TELE2008-A 15V Styreytemer og reguleringteknikk» Verjonkontroll Dokumenter og filer om blir prouert i forbinele me projektet blir lagret i en felle Dropbox-mappe. Filene kal ha bekrivene navn, og innehole verjonnummer eller ato Teter og jekkliter Programmer og jekkliter kal ammenligne mot mål og peifikajoner nevnt i forprojektrapporten. Eventuelle avvik kal okumentere og rette. 55
62 4.4 Projekttyring og amarbei SV & KS Rett etter vi fikk utlevert oppgavetekten 25/2 atte gruppe 6 eg ne og lete gjennom hele tekten grunig. Vi ikuterte ting om virket uklare, og lage o en teori om hvoran projektet kulle utføre. I løpet av forprojektet lage vi ogå en plan for hvem om kulle ha hoveanvaret for e forkjellige projektelene. For å forenkle arbeiet me fileling og kommunikajon ble et rakt opprettet flere grupper på internett. Filer om ble elt inna i gruppen kulle legge ut på nettkytjeneten ropbox, me fornuftige navn om gir informajon om atoen en ble laget, og hva filen inneholer. Inne i gruppe 6 in mappe på ropbox ble et opprettet flere unermapper til hver projektel, biler og lignene. For å forenkle kommunikajon o imellom lage vi en gruppe på nettamfunnet facebook. Den bruker vi til å hole en generell overikt over framgangen og hvor lang e forkjellige melemmene har kommet. I tillegg til ette ble et opprettet en katalog på unerviningnettteet itlearning for eling av rapporter, møteinnkallinger og lignene mellom gruppen og veileer. Gruppe 5 og 6 har ammen en rigg til råighet i projektet. Vi måtte a finne en orning for hvem om kulle har riggen til enhver ti. Det ble betemt at vi kulle ha riggen annenhver ag. Dette har fungert utmerket hele projektet igjennom. For å hole overikt over areene vi brukte i entank atte vi opp et Excel-okument me en tabell (e velegg 9 i entankrapport) over alle areene vi kulle bruke i mater, lave 1, lave 2, amt hvilken retning informajonen flyter og hva e ble brukt til. Slik kunne vi jobbe me hver vår oppgave uten å behøve å mae kontant på hveranre, amtiig om at janen for å få problemer me amkjøring blir mint mulig. På tro av at vår veileer ikke har fat kontor på bygget, og at e reterene veileerne ikke er å finne på campu hele uken, føler vi at veileningen har vært tiltrekkelig. Vi har hele vegen elv måtte oppøke hjelp når et er behøvelig, og tror ette har lagt grunnlaget for et got amarbeie inna, og i mellom gruppene. «Å lære ve å gjøre» har vært en gjennomgåene filoofi i projektet gang, og gruppen hoer har ofte måtte ta tak i problemer me amlet kraft. Vi itter nå igjen me en yptgåene fortåele av projektet i in helhet. 56
63 5 Projekttyring totank AR & KR Etter entankemontrajonen tirag 28/4 lo vi ammen gruppe 5 og 6 til en felle gruppe på 12 peroner om ammen har utarbeiet totankprojektet. Det førte vi gjore var å gjennomførte vi et internt møte hvor et ble betemt hvem om kulle være anvarlig for hva. Vi valgte å la e anvarlige fra InTouch, PLS og operatørpanel få fortette i amme por om ve entankprojektet for å løe problemene på en enklet mulig måte. Arbeiet me totankprojektelen har gått rimelig bra ien vi tartet. For et mete har et hanlet om å utvie brukergrenenittent i InTouch og operatørpanelet til to tanker iteenfor èn, og programmere PLS ene i forhol til ette. Begge gruppene fikk go erfaring me ie oppgavene i entankprojektet, og ette har uten tvil vært en tor forel mtp totankprojektet. Sien vi er 12 peroner om jobber ammen om ette, har et ogå vært viktig å ele inn oppgavene for at vi ikke kal itte 11 peroner og e på at en peron jobber. I tillegg til totankprojektet har begge gruppene gjort ferig bonuoppgaven in. Gruppe 5 har ferigtilt bonuoppgave 3 Kameraovervåking av tankriggen via internett, og gruppe 6 har ferigtilt bonuoppgave 5 (eget forlag) Autotuning av PID-regulator. Die bonuoppgavene er okumentert i totankrapporten. Inneling totank (bonuoppgaver ikke inkluert) PLS (GX Work) Knut M. Røberg, Roy K. Solvang, Stian Dyrne & Emil Hatletveit InTouch Frerik Løkken, Michael Mcgrory, Kritian Strøm & Snorre Vongraven Operatørpanel (ix-panel) Jørgen Aaen, Anrea Rø & Terje M Sørenen Tikriftartikkel Anrea Rø (Gruppe 5) & Anrea Haugen (Gruppe 6) 57
64 6 Konklujon SV I Totankrapporten har vi okumentert arbeiet vi i gruppe 5, og 6 har utført i løpet av ite el i projektet. Oppgaven gikk ut på at 2 grupper kulle arbeie ammen om å implementere en ektra tank til programmene våre. Dette gjeler båe brukergrenenittene og tyreytemet. I tillegg til ette kulle bonuoppgavene til hver av gruppene fullføre. Det vite eg at et teknike apektet av oppgaven ikke var peielt krevene. Utforringen kom av gruppen tørrele. Til tro for go kommunikajon og amarbeivilje, vite et eg til lutt at vi manglet noen om hae et overornet anvar for e enkelte elene fullførele. Vi føler at antall eltakere var i mete laget ett i forhol til oppgaven tørrele. På tro av noen problematike ite timer, har vi fått utført oppgaven i henhol til kravene att i oppgavetekten, og er got fornøy me reultatet. Figur 57 Overiktbile kobling mellom PLS-rig og tank-rig 58
65 7 Litteratur TMS Vi brukte følgene verker uner entankprojektet. Arnfinn Hofta «PLS-teknikk; Mitubihi Melec FX0(S) og FX2N; GX Work2» Per Hveem «Sanntiatateknikk; Digitale regulatorer, Foreleningnotater» Per Hveem, Kåre Bjørvik «Reguleringteknikk» Kåre Bjørvik «Dynamike ytemer» Projektperm lagt ut offentlig på It' Learning. Sebor,Egar,Mellichamp og Doyle «Proce Dynamic an Control» InTouch HMI 9.5 Funamental of Aplication Development Coure. 59
66 8 Velegg 1. Figurliter 2. Mater PLS 3. Slave 1 PLS 4. Slave 2 PLS 5. Sjekklite ve tet av totank 6. OPC BEIJER SLAVE 1 7. OPC BEIJER - Slave 2 8. Overiktvinu 60
67 Figurlite Figur 1 Overiktbile kobling mellom PLS-rig og tank-rig... 1 Figur 2 Lite over minneceller og ataor til lave Figur 3 Lite over minneceller og ataor til lave Figur 4 POU for lave 1 i materprogrammet... 7 Figur 5 POU for lave 2 i materprogrammet el Figur 6 POU for lave 2 i materprogrammet el Figur 7 Alarmprogram for tank 2 el Figur 8 Alarmprogram for tank 2 el Figur 9 Alarmprogram for tank 2 el Figur 10 POU for alarmakjoner el Figur 11 POU for alarmakjoner el Figur 12 POU for alarmakjoner el Figur 13 POU for alarmakjoner el Figur 14 Sprangrepon fra trenvinu i InTouch Figur 15 Prinippkie FOPDT Figur 16 Målepunkt for FOPDT Figur 17 ITAE tabell Figur 18 Sprangrepon på tank Figur 19 Målepunkt for FOPDT Figur 20 Prinippkie av ventil Figur 21 Taglite IX-panel Figur 22 Overiktbile operatørpanel Figur 23 Operatørie for tank 1 IX-panel Figur 24 Trenvinu IX-panel Figur 25 Hjelpvinu IX-panel Figur 26 Alarmvinu IX-panel Figur 27 Hovevinu Figur 28 Tren i hovevinu Figur 29 Parameterknapper Figur 30 Innlogging Figur 31 Parametervinuer Figur 32 Manuellparametere Figur 33 Foroverkoblingknapp Figur 34 Foroverkoblingparametere Figur 35 Hitorik tren Figur 36 Hitorik tren Figur 37 Pulening av verier. ener høy veri en gang Figur 38 Vining av IP kamera i InTouch Figur 39 Scriptet til IP kamera i Intouch Figur 40 - Parameterviing for OP2 og Figur 41 Parameterviing for OP Figur 43 IP-kamera Figur 44 Webkameragrenenitt i nettleer Figur 45 - Inntilling av HTTP-port i webkamera Figur 46 Samlig av måleverier for vigningene (autotuning) Figur 47 Start av ny perioe for vigninger
68 Figur 48 Sammeligner forrje veri me nåveri for å e om et er tåene vigninger Figur 49 Sjekker om et har gått 7 perioer ien tart av autotuning Figur 50 Måler hvor langt autotuning har kommet Figur 51 Regner ut Kp og Ti utfra målte verier på Kk og Tk Figur 52 Sener et ignal for når autotuningen er ferig Figur 53 Vier hvoran autotuningen kjøre Figur 54 Sørger for at påraget tår i manuell uner autotuning Figur 55 Vier hvoran u velger autotuning i InTouch Figur 56 Vier hvoran forlaget til intillinger kommer ut Figur 57 Vier tatu på autotuningen Figur 58 Overiktbile kobling mellom PLS-rig og tank-rig
69
70 IL Data Name : Init (* Exchange PLC ata with Profibu DP *) (* Moule Type PB92D - Moe E *) LD X1B (* write communication READY ignal *) AND X1D (* write Moule READY *) BMOV_M D100, K16, DP_ARRAY[0] (* DP lave with FDL 1 *) BMOV_M D200, K16, DP_ARRAY[16] (* DP lave with FDL 2 *) TO_M DP_ARRAY[0], K0, K960, K32 (* Write output ata to mater *) OUT_M Y00 (* Exchange tart requet ignal *) AND X00 (* Data exchange one *) FROM_M K0, K0, K32, DP_ARRAY[0] (* Rea input ata from mater *) BMOV_M DP_ARRAY[0], K16, D120 (* DP lave with FDL 1 *) BMOV_M DP_ARRAY[16], K16, D220 (* DP lave with FDL 2 *) 1
71 Structure Laer/FBD Data Name : Batterimating 1 Sener hele tien verier om ene ne til laveplser ogå til batterimatee mellomlagringregiter og minneceller. Førte cann etter trømbru ene e batterimatee veriene ne til lave PLSene 2 Tar vare på alle ataregitre om ene til lave1 og 2 SM402 D n BMOV R100 D n BMOV R200 Tar vare på Digital_I_S1 og Digital_I_S2 hvor alle boolke verier om ene ne til lavene ligger SM402 MOV MOV >>00 K4M40 K4L100 K4M200 K4L200 K1M170 >>00 K1M170 MOV K1L170 3 Førte cann etter trømbru ene batterimatee regitre og minneceller ne til lavene SM402 R n BMOV D100 R n BMOV D200 MOV MOV >>00 K4L100 K4M100 K4L200 K4M200 K1L170 2
72 Structure Laer/FBD Data Name : Batterimating >>00 K1L170 MOV K1M150 3
73 Structure Laer/FBD Data Name : Slave1 1 Her er mater-pl i nettverket. Mater oppgave er å vireformile informajon mellom alle enheter i nettverket, båe på profibu og ethernet. For mer informajon om hvoran ette foregår ref.miniprojektet. profibu og ethernet. 2 Overikt over minnecellene Tilbakemelinger Overikt over ataregitrene M100 - PI-REG M101 - P-REG M102 - Manuell M103 - Diregkte reg M104 - Reverert reg M105 - Pff_REG M106 - Dff_REG M107 - PDff_REG M108 - Foroverkobling M109 - Auto M150 - Pumpe M151 - Mv1 M152 - Mv2 M153 - Mv3 M154 - Kvittering Alarm Tank1 M155 - Kvittering Alarm Tank2 M40 - PI-REG M41 - P-REG M42 - MANUELL M43 - Direkte-reg M44 - Reverert-reg M45 - Pff-REG M46 - Dff-REG M47 - PDff-REG M48 - Forover-REG M49 - Auto M50 - HH alarm tank1 M51 - LL alarm tank1 M52 - Avvik alarm tank1 M53 - HH alarm tank2 M54 - LL alarm tank2 M55 - Avvik alarm tank2 M170 - Pumpe M171 - Mv1 M172 - Mv2 M173 - Mv3 D100 - Proporjonalforterkning Kp D101 - Integrajonti Ti D102 - Derivajonti T D103 - Filterkontant for PD-reg n D104 - Referanenivå D105 - Samplingti h D106 - Minneceller D107 - Manuelt pårag Um D108 - Kpff D109 - Flowmåling D110 - Nominielt pårag U0 D120 - Nivå proent D122 - Ventilpårag proent D124 - Referane proent D127 - Flowmåling erikt over ataregitrene porjonalforterkning Kp ivajonti T rkontant for PD-reg n 3 Digital_I_S1[0] 16 BITARR_TO_INT BitArr n* D106 Gjør om en bit-array til 16-bit ataregiter og ener ne til lave 1 Bitarray betår av flere minneceller bekrevet ovenfor 4
74 Structure Laer/FBD Data Name : Slave1 4 Digital_I_S1_1[0] 16 BITARR_TO_INT BitArr n* D112 Gjør om en bit-array til 16-bit ataregiter og ener ne til lave 1 Bitarray betår av flere minneceller bekrevet ovenfor 5 D INT_TO_BITARR BitArr n* Tilbakemelinger_Slave1[0] Tilbakemelinger hente fra lave 1, ref. minnecelleoverikt øvert 6 D INT_TO_BITARR BitArr n* Tilbakemelinger_Slave1_1[0] Tilbakemelinger hente fra lave 1, ref. minnecelleoverikt øvert 7 M202 D124 MOV D104 Ve valg av manuell oppaterer vi referaneverien. Sener referanen i loop av manuell oppaterer vi 5
75 Structure Laer/FBD Data Name : Slave2 1 Her er mater-pl i nettverket. Mater oppgave er å vireformile informajon mellom alle enheter i nettverket, båe på profibu og ethernet. For mer informajon om hvoran ette foregår ref.miniprojektet. profibu og ethernet. 2 Overikt over minnecellene Tilbakemelinger Overikt over ataregitrene M200 - PI-REG M201 - P-REG M202 - Manuell M203 - Diregkte reg M204 - Reverert reg M205 - Pff_REG M206 - Dff_REG M207 - PDff_REG M208 - Foroverkobling M209 - Auto M20 - PI-REG M21 - P-REG M22 - MANUELL M23 - Direkte-reg M24 - Reverert-reg M25 - Pff-REG M26 - Dff-REG M27 - PDff-REG M28 - Forover-REG M29 - Auto D200 - Minneceller D201 - Propojonalforterkning D202 - Integrajonti D203 - Samplingti D204 - Referanenivå D205 - Nominelt pårag D206 - Manuelt pårag D207 - KpFF D208 - TFF D209 - Flowmåling D210 - Filterti D220 - Nivå proent D222 - Ventilpårag proent D224 - Referane proent D226 - Tilbakemeling D228 - Avvik erikt over ataregitrene pojonalforterkning grajonti 6
76 Structure Laer/FBD Data Name : Slave2 3 D120 MOV D209 Henter flowmålingen fra lave 1 og flytter en viere til lave 2. Digital_I_S2[0] 16 BITARR_TO_INT BitArr n* D200 Gjør om en bit-array til 16-bit ataregiter og ener ne til lave 2 Bitarray betår av flere minneceller bekrevet ovenfor M202 D224 MOV D204 Ve valg av manuell oppaterer vi referaneverien. Sener referanen i loop D220 MOV D109 Sener nivå fra lave 2 til lave 1 D228 MOV D111 Sener avvik fra lave 2 til lave 1 M21 D225 MOV D205 M202 D221 MOV D206 owmålingen fra lave 1 og flytter en bit-array til 16-bit ter og ener ne til lave 2 betår av flere minneceller av manuell oppaterer vi 7
77 Structure Laer/FBD Data Name : Slave2 4 Feilmelinger og warning i q-pl Profibu FROM n1 n2 n3 BUS_STATUS Sjekker generelltatu på profibu Ve profibufeil går BUS_FEIL (M0) høy. BUS_STATUS MOV K1M300 BUS_STATUS LD> BUS_FEIL Batteritiltan SM51 B_1 Skift batteri å fort om mulig, batteripenninga ynker. SM52 B_2 Skift batteri umielbart, batteripenning kritik lav enerelltatu på profibu ibufeil går BUS_FEIL (M0) høy. eri å fort om mulig, eri umielbart, batteripenning 5 D INT_TO_BITARR BitArr n* Tilbakemelinger_Slave2[0] Tilbakemelinger hente fra lave 2, ref. minnecelleoverikt øvert 8
78 Structure Laer/FBD Data Name : Slave2 elinger hente fra lave 2, ref. 9
79 Label Data Name : Variabellite Global Label Setting Cla Label Name Data Type Contant Device Are Comment Remark Relation with Sytem Label Sytem Label Name Attribute VAR_GLOBAL Digital_I_S1 %MX Bit(0..15) M100 Digitale output til lave 1 2 VAR_GLOBAL Digital_I_S2 Bit(0..15) M200 %MX0.200 Digitale output til lave 2 3 VAR_GLOBAL Tilbakemelinger_Slave1 Bit(0..15) M40 %MX0.40 Tilbakemeling på pumpa 4 VAR_GLOBAL Tilbakemelinger_Slave2 Bit(0..15) M20 %MX0.20 Tilbakemelinger på regulatorkonfigurajoner VAR_GLOBAL BUS_STATUS Wor[Signe] D0 %MW0.0 8 VAR_GLOBAL BUS_FEIL Bit M60 %MX VAR_GLOBAL B_1 Bit M61 %MX0.61 Synkene batt.penning 10 VAR_GLOBAL B_2 Bit M62 %MX0.62 Kritik batt.penning VAR_GLOBAL AlarmerS2 Wor[Signe] VAR_GLOBAL Digital_I_S1_1 Bit(0..15) M150 %MX VAR_GLOBAL Tilbakemelinger_Slave1_1 Bit(0..15) M170 %MX
80 Label Data Name : Batterimating Local Label Setting Cla Label Name Data Type Contant Device Are Comment 11
81 Label Data Name : Init Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR DP_ARRAY Wor[Unigne]/Bit String[16-bit](0..31) Data buffer for mater input/output area 12
82 Label Data Name : Slave1 Local Label Setting Cla Label Name Data Type Contant Device Are Comment 13
83 Label Data Name : Slave2 Local Label Setting Cla Label Name Data Type Contant Device Are Comment 14
84
85 Structure Laer/FBD Data Name : Alarm_tank1 1 KvittAlarmer_pumpe_MV INT_TO_BITARR BitArr n* KvittAlarmer_pumpe_MV_arr[0] M90 - Pumpe M91 - Mv1 M92 - Mv2 M93 - Mv3 M94 - Kvittering alarm tank1 M95 - kvittering alarm tank2 2 KvittAlarmer_pumpe_MV_arr[4] Alarmkvittering_tank1 KvittAlarmer_pumpe_MV_arr[5] Alarmkvittering_tank2 3 Nivåmåling LD< KritikLav Sjekker om proeverien er uner 10% Nivåmåling LD> KritikHøy Sjekker om proeverien er over 90% LDD< Avvik_e OR Avvik_e 63 LDD> 1 2 HøytAvvik Sjekker om avviket er over 25% 4 KritikLav KritikHøy OR TC5 50 OUT_T TCoil TValue Sjekker om tiltanene holer eg i mer enn 5 ekuner. Timeren går høy erom ette er tilfelle. 5 HøytAvvik TC6 50 OUT_T TCoil TValue Sjekker om tiltanen holer eg i mer enn 5 ekuner. Timeren går høy erom ette er tilfelle. 6 KritikHøy TS5 HøyAlarm_tank1 KritikLav TS5 LavAlarm_tank1 HøytAvvik TS6 AvvikAlarm_tank1 Setter alarmer avhengig av tiltan, erom ie har ligget inne i mer enn 5 ekuner 1
86 Structure Laer/FBD Data Name : Alarm_tank1 7 Setter lik at alarmtiltaner huke helt til e kvittere ut. Die kal ikke huke erom e er feilaktig kvittert ut HøyAlarm_tank1Feilkvittering_tank1 huk_høy_alarm_tank1 S LavAlarm_tank1 Feilkvittering_tank1 huk_lav_alarm_tank1 S AvvikAlarm_tank1Feilkvittering_tank1 huk_avvikalarm_tank1 S 8 Setter variabel for feilkvittering erom alarmen kvittere men et fremele er HøyAlarm_tank1 LavAlarm_tank1 AvvikAlarm_tank1 OR Alarmkvittering_tank1 Feilkvittering_tank1 HøyAlarm_tank1 LavAlarm_tank1 AvvikAlarm_tank1 OR Feilkvittering_tank1 Denne variabelen hole høy å lenge et er 9 Alarmkvittering_tank1 Reetter tiligere alarmtiltaner erom e kvittere ut huk_høy_alarm_tank1 R huk_lav_alarm_tank1 R huk_avvikalarm_tank1 R 2
87 Structure Laer/FBD Data Name : Alarm_tank2 1 Nivå_tank LD< KritikLav Sjekker om proeverien er uner 10% Nivå_tank LD> KritikHøy Sjekker om proeverien er over 90% LD< Avvik_tank OR Avvik_tank LD> HøytAvvik Sjekker om avviket er over 25% 2 KritikLav KritikHøy OR TC11 50 OUT_T TCoil TValue Sjekker om tiltanene holer eg i mer enn 5 ekuner. Timeren går høy erom ette er tilfelle. 3 HøytAvvik TC12 50 OUT_T TCoil TValue Sjekker om tiltanen holer eg i mer enn 5 ekuner. Timeren går høy erom ette er tilfelle. 4 KritikHøy TS11 HøyAlarm_tank2 KritikLav TS11 LavAlarm_tank2 HøytAvvik TS12 AvvikAlarm_tank2 Setter alarmer avhengig av tiltan, erom ie har ligget inne i mer enn 5 ekuner 5 Setter lik at alarmtiltaner huke helt til e kvittere ut. Die kal ikke huke erom e er feilaktig kvittert ut HøyAlarm_tank2Feilkvittering_tank2huk_høy_alarm_tank2 S LavAlarm_tank2 Feilkvittering_tank2huk_lav_alarm_tank2 S AvvikAlarm_tank2Feilkvittering_tank2huk_avvikalarm_tank2 S 6 Setter variabel for feilkvittering erom alarmen kvittere men et fremele er HøyAlarm_tank2 LavAlarm_tank2 AvvikAlarm_tank2 OR Alarmkvittering_tank2 Feilkvittering_tank2 HøyAlarm_tank2 LavAlarm_tank2 AvvikAlarm_tank2 OR Feilkvittering_tank2 Denne variabelen hole høy å lenge et er 3
88 Structure Laer/FBD Data Name : Alarm_tank2 7 Alarmkvittering_tank2 Reetter tiligere alarmtiltaner erom e kvittere ut huk_høy_alarm_tank2 R huk_lav_alarm_tank2 R huk_avvikalarm_tank2 R 4
89 Structure Laer/FBD Data Name : Alarmakjoner 1 huk_høy_alarm_tank1 huk_lav_alarm_tank1 huk_høy_alarm_tank2 huk_lav_alarm_tank2 OR Kritik_Alarm 2 Er høy 0.2 ekuner og lav i 0.2 ekuner erom et har vært alarm for høyt eller lavt nivå om ikke er kvittert ut OR TS8 OUT_T huk_høy_alarm_tank1 huk_lav_alarm_tank1 TC7 2 TCoil TValue TC8 4 OUT_T TCoil TValue 3 Er høy i 0.5 ekuner og lav i 0.5 ekuner erom et har gått alarm for høyt avvik om ikke er kvittert ut, eller om et ikke ligger inn en alarm for høyt eller lav nivå amtiig huk_avvikalarm_tank1 Kritik_Alarm TS10 OUT_T TC9 5 TCoil TValue TC10 10 OUT_T TCoil TValue 4 Alarmlampa kal lye kontant erom alarmtiltanen er feilkvittert Feilkvittering_tank1 Alarmlampe1 Alarmlampa kal lye i 0.2 ekuner av og på erom et har gått alarm for høyt eller lavt nivå TS7 Alarmlampa kal lye i 0.5 ekuner av og på erom et har gått alarm for høyt avvik TS9 5 Er høy 0.2 ekuner og lav i 0.2 ekuner erom et har vært alarm for høyt eller lavt nivå om ikke er kvittert ut OR TS14 OUT_T huk_høy_alarm_tank2 huk_lav_alarm_tank2 TC13 2 TCoil TValue TC14 4 OUT_T TCoil TValue 6 Er høy i 0.5 ekuner og lav i 0.5 ekuner erom et har gått alarm for høyt avvik om ikke er kvittert ut, eller om et ikke ligger inn en alarm for høyt eller lav nivå amtiig huk_avvikalarm_tank2 Kritik_Alarm TS16 OUT_T TC15 5 TCoil TValue TC16 10 OUT_T TCoil TValue 5
90 Structure Laer/FBD Data Name : Alarmakjoner 7 Alarmlampa kal lye kontant erom alarmtiltanen er feilkvittert Feilkvittering_tank2 Alarmlampa kal lye i 0.2 ekuner av og på erom et har gått alarm for høyt eller lavt nivå TS13 Alarmlampa kal lye i 0.5 ekuner av og på erom et har gått alarm for høyt avvik TS15 Alarmlampe2 8 Alarmlampe1 Alarmlampe2 Lampe 6
91 Structure Laer/FBD Data Name : Input 1 Her hente verier fra MaterPLS. Båe kommunikajon me Mater PLS og Tankrigg. 2 Dette er areen til Profibukortet på Slave 1: n1 n2 n3 TO = Areen til laven n1 = Moulnr. til Profibu n2 = Bufferminne reert for n3 = Antall 16 bit 3 Henter verier fra bufferminne på profibukortet FROM FROM FROM FROM 1 n1 Kp_10 1 n1 Ti_10 1 n1 T 1 n1 T_n 0 n2 1 n2 2 n2 3 n2 1 n3 1 n3 1 n3 1 n3 FROM FROM FROM 1 n1 Ref_proent 1 n1 Samplingti_h_10 1 n1 KNAPPER 4 n2 5 n2 6 n2 1 n3 1 n3 1 n3 FROM FROM FROM 1 n1 U_manuell_proent 1 n1 Kpff 1 n1 Nivå_tank2 7 n2 8 n2 9 n2 1 n3 1 n3 1 n3 FROM FROM FROM 1 n1 Nominelt_pårag_u0 1 n1 Avvik_tank2 1 n1 KvittAlarmer_pumpe_MV n2 11 n2 12 n2 1 n3 1 n3 1 n3 Pinintrukjon FROM-blokk: n1:moulpla ("lot") n2:bufferminnenr. ("BFM") n3:antall 16-bit or om kal overføre :Areen (variabelen) om ata krive til 7
92 Structure Laer/FBD Data Name : Input T_n KNAPPER Nivå_tank2 KvittAlarmer_pumpe_MV123 4 Gjør om Ingeniørverier til oppløte verier MUL Ref_proent DIV Referane Mottar proentverier fra HMI og konverterer e til 8bit oppløning MUL U_manuell_proent DIV U_m rier fra HMI og konverterer e til 5 AD/DA-konvertering M0 PLS Fra trykktranmitter TO TO FROM n1 n2 n n1 n2 n n1 n2 n3 Nivåmåling 1) Velger kanal 0 2) Starter AD-konv. på kanal 0. 3) Leer inngangen og legger innholet i Nivåmåling TO TO Ventilpårag n1 n2 n n1 n2 n n1 n2 n3 TO Til ventil 1) D0 kopiere til BFM #16 i DA 2) Starter DA-konv. 3) Stopper DA-konv. 8
93 Structure Laer/FBD Data Name : Input gangen og legger innholet i 6 Flowmåling Leer analoge innganger 4-20mA og legger ata i D2. I ette tilfellet er utganger og innganger koblet Velger AD-kanal Starter AD-omforming Legger målingen til Dataregiter Analog kanal om kal lee Moulnr. AD/DA omformer Bufferminne på omformer Antall 16 bit n1 n2 n3 TO Start AD omforming Moulnr. AD/DA Bufferminne på omformer Antall 16 bit n1 n2 n3 TO Moulnr. AD/DA Bufferminne på omformer Antall 16 bit FROM n1 n2 n3 Flowmåling 9
94 Structure Laer/FBD Data Name : Manuell_Auto 1 Her ligger manuell-ragulatoren. Kjøre kun ve valg av Manuell-regulator Påraget fra regulatoren ene til "Pårag" POU om U_m. 2 Forbereeler til rykkfri overgang fra P/PI til manuell P_REG VentilpåragD DMOV U_mD Rykkfritt fra P-reg til manuell. Kopierer ventilpåraget til U_m P_REG Ventilpårag MOV U_m U_m 16-bit krive inn av operatør, legge i "wor to ouble" POU, konvertere til 32-bit og overkriver U_mD 32-bit. Må erfor ogå krive over enne variablen for å unngå operatørfeil. (v at operatør prøver å ene U_m ve kjøring av P eller PI) inn av operatør, legge i "wor to ertere til 32-bit og overkriver ve over enne variablen for å (v at operatør prøver å ene 3 PI_REG Ventilpårag_array[0] DMOV U_mD Rykkfritt fra PI-reg til Manuell, kopierer forrige ventilpårag til U_m PI_REG Ventilpårag MOV U_m U_m 16-bit krive inn av operatør, legge i "wor to ouble" POU, konvertere til 32-bit og overkriver U_mD 32-bit. Må erfor ogå krive over enne variablen for å unngå operatørfeil. (v at operatør prøver å ene U_m ve kjøring av P eller PI) l Manuell, kopierer forrige inn av operatør, legge i "wor to ertere til 32-bit og overkriver ve over enne variablen for å (v at operatør prøver å ene 4 PI_REG P_REG Man p CJ Hopper erom vi er i P/PI v. Auto 10
95 Structure Laer/FBD Data Name : Manuell_Auto 5 Manuellkjøring MANUELL U_mD DMOV Ventilpårag_array[0] Forbereele fra Man til PI (rykkfritt) U_mD DMOV Nominelt_pårag_u0D Forbereele fra Man til P (rykkfritt) Nivåmåling_D DMOV ReferaneD Forbereele fra Man til PI og P (rykkfritt) U_m MOV Ventilpårag Manuellkjøring av ventilen an til PI og P (rykkfritt) 6 Man: 11
96 Structure Laer/FBD Data Name : Output 1 Her ene verier til MaterPLS. Båe kommunikajon me Mater PLS og Tankrigg. 2 ReferaneD _DINT DINT_TO_INT Referane I tilfellet manuellkjøring opatere regitrene opp mot hveranre. nuellkjøring opatere regitrene 3 Enhetkonvertering Nivåmåling Input Enhetkonvertering_1 Enhetkonvertering Output Nivå_proent Gjør om verier til verier me avvik på +-0,5% Ventilpårag Input Enhetkonvertering_2 Enhetkonvertering Output Ventilpårag_proent Referane Input Enhetkonvertering_3 Enhetkonvertering Output ref_proent 55 verier til verier me 12
97 Structure Laer/FBD Data Name : Output 4 Tilbakemeling til HMI på regulatorkonfigurajon PI_REG Tilbakemeling[0] P_REG Tilbakemeling[1] MANUELL Tilbakemeling[2] Direkte_reg Tilbakemeling[3] Reverert_reg Tilbakemeling[4] Pff_REG Tilbakemeling[5] Dff_REG Tilbakemeling[6] PDff_REG Tilbakemeling[7] Forover_REG Tilbakemeling[8] PI_REG Tilbakemeling[9] P_REG Alarmer huk_høy_alarm_tank1 huk_lav_alarm_tank1 huk_avvikalarm_tank1 huk_høy_alarm_tank2 huk_lav_alarm_tank2 huk_avvikalarm_tank2 Tilbakemeling[10] Tilbakemeling[11] Tilbakemeling[12] Tilbakemeling[13] Tilbakemeling[14] Tilbakemeling[15] Tilbakemeling[0] 16 BITARR_TO_INT BitArr n* Tilbakemeling_W Konverterer til wor for ening på bu 5 KvittAlarmer_pumpe_MV_arr[1] KvittAlarmer_pumpe_MV_arr[2] KvittAlarmer_pumpe_MV_arr[3] Y10 Y11 Y12 Mv1 Mv2 Mv3 KvittAlarmer_pumpe_MV_arr[0] HøyAlarm_tank1 HøyAlarm_tank2 Y13 Pumpe 13
98 Structure Laer/FBD Data Name : Output 6 Flere tilbakemelinger Y13 Y10 Y11 Y12 Tilbakemeling_mv_pu[0] Tilbakemeling_mv_pu[1] Tilbakemeling_mv_pu[2] Tilbakemeling_mv_pu[3] Tilb_pumpe Tilb_magnetventil1 Tilb_magnetventil2 Tilb_magnetventil3 Feilkvittering_tank1 Feilkvittering_tank2 Tilbakemeling_mv_pu[4] Tilbakemeling_mv_pu[5] Dette er en tilbakekobling fra alle utgangene om benytte for å e om e har gått aktive Y5 Tilbakemeling_mv_pu[6] Tilbakemeling_mv_pu[0] 16 BITARR_TO_INT BitArr n* Tilbakemeling_mv_pu_1 Dette er en tilbakekobling fra alle utgangene om benytte for å e om e har gått aktive 7 Sener verier til bufferminnet på profibukortet TO TO Nivå_proent n1 n2 n3 Ventilpårag_proent n1 n2 n3 ref_proent n1 n2 n3 TO Pinintrukjon TO-blokk: :Areen (variabelen) om ata hente fra n1:moulpla ("lot") n2:bufferminnenr. ("BFM") n3:antall 16-bit or om kal overføre TO TO Tilbakemeling_W n1 n2 n3 Flowmåling n1 n2 n3 Tilbakemeling_mv_pu_ n1 n2 n3 TO 14
99 Structure Laer/FBD Data Name : Output (variabelen) om ata hente fra -bit or om kal overføre 15
100 Structure Laer/FBD Data Name : P-regulator 1 Her ligger P-ragulatoren. Kjøre kun ve valg av P-regulator Se i entankrapporten for regulatoralgoritme Den er byg opp av Globale variabler og flere Lokale variabler kalt HJ. Påraget fra regulatoren ene til "Pårag" POU om U_P. Når vi multiplierer eller ivierer 32bit blir reultatet 64bit. 64bit kan ikke bruke av noe intrukjon irekte, erfor er e aktuelle hjelpevariablene opprettet om 2 array av 32bit. For å kunne bruke kun 32bit av 64bit inekerer vi ette me klammer. Fek HJ[0]. kunne bruke kun 32bit av 64bit 2 Forbereeler til rykkfri overgang mellom flere regulatortyper og P-regulering PI_REG Ventilpårag_array[0] DMOV Nominelt_pårag_u0D Ve kjøring av PI-reg kopiere forrige ventilpårag til nominielt pårag (rykkfri overgang) PI_REG Ventilpårag_arrayW[0] MOV Nominelt_pårag_u0 Nom. pårag 16-bit krive inn av operatør, legge i "wor to ouble" POU, konvertere til 32-bit og overkriver Nom. påragd 32-bit. Må erfor ogå krive over enne variablen for å unngå operatørfeil. (v at operatør prøver å ene nom pårag ve kjøring av PI eller P/PDff) ing av PI-reg kopiere forrige rag til nominielt pårag (rykkfri rag 16-bit krive inn av operatør, "wor to ouble" POU, konvertere og overkriver Nom. påragd r ogå krive over enne variablen gå operatørfeil. (v at operatør ene nom pårag ve kjøring av 16
101 Structure Laer/FBD Data Name : P-regulator 3 PDff_REG Pff_REG PLF Ventilpårag_array[0] DMOV Nominelt_pårag_u0D Ventilpårag Derom vi går fra P/PD-foroverkobling til vanlig P-regulering, må nominielt pårag ette. MOV Nominelt_pårag_u0 Pff_REG DMOV PDff_REG 0 Nominelt_pårag_u0D Derom P/PD-foroverregulering kjøre kal nominielt pårag ikke benytte. MOV 0 Nominelt_pårag_u0 rkobling til vanlig P-regulering, må kjøre kal nominielt pårag ikke 4 MANUELL PI_REG Til_PI p CJ Hopper over P-reg ve valg av PI-reg Hopper ogå når Manuellknappen er "Høy" ver P-reg ve valg av PI-reg gå når Manuellknappen er "Høy" 5 P-regulator Kp_10D Avvik_e 1 2 DMUL HJ3 Avviket forterke me Kp HJ3[0] DDIV HJ4 Deler på 10 for å korrigere for Kpx10 HJ4[0] Nominelt_pårag_u0D 1 2 DADD U_P Legger til nominielt pårag Pårag fra P-regulator 17
102 Structure Laer/FBD Data Name : P-regulator 10 for å korrigere for Kpx10 6 Til_PI: 18
103 Structure Laer/FBD Data Name : PD-regulator 1 Her ligger PD-ragulatoren om bruke til foroverkoblingen. Se i entankrapporten for regulatoralgoritmer Den er byg opp av Globale variabler og flere Lokale variabler kalt HJ. Så lenge foroverregulering er valgt jobber hele regulatoren. Påragene fra e forkjellige regulatorene ummere etter brukeren ønke i "Pårag" POU. Når vi multiplierer eller ivierer 32bit blir reultatet 64bit. 64bit kan ikke bruke av noe intrukjon irekte, erfor er e aktuelle hjelpevariablene opprettet om 2 array av 32bit. For å kunne bruke kun 32bit av 64bit inekerer vi ette me klammer. Fek HJ[0]. kunne bruke kun 32bit av 64bit 2 Foroverkoblet Pff-regulator PI_REG Flowmåling_D Flowmåling_array[0] 1 2 DSUB HJ15 PI_REG KpffD HJ DMUL HJ14 Ve valg av PI-regulator må enringen i flow forterke me Kpff P_REG KpffD Flowmåling_D 1 2 DMUL HJ14 Ve valg av P-regulaor forterker vi flow me faktor Kpff HJ14[0] DDIV HJ13 Korrigerer for 10*Kpff HJ13[0] DMOV U_Pff Kopierer reultatet til pårag for foroverkoblet P-regulator n i flow forterke me Kpff erkoblet P-regulator 19
104 Structure Laer/FBD Data Name : PD-regulator 3 Foroverkoblet Dff-regulator NB!! Bruke kun ve P og PI me TD T_nD 1 2 DDIV Tff Lager en ny variabel Tff for bruk viere Tff[0] U_Dff_array[0] 1 2 DMUL HJ1 Forterker forrige påraget fra foroverkoblet D-regulator forrige amplingpul. Flowmåling_D Flowmåling_array[0] 1 2 DSUB Fortyrrele_V Sammenligner flow nå og flow forrige amplingpul, reultatet legge i Fortyrrele_V Fortyrrele_V DMUL HJ3 Kpff er att lik 1 ve ren Dff-regulator, men på grunn av heltalproblematikk er Kpff multipliert me 10, HJ1[0] HJ3[0] 1 2 DADD HJ4 Summerer e to biragene ovenfor. Samplingti_h_10D Tff[0] 1 2 DADD HJ5 Summerer amplingti me hjelpevariabelen og legger reultatet i HJ4 HJ5 1 2 DDIV HJ6 HJ6[0] DMOV U_Dff Kopierer innholet i HJ6[0] til pårag for D-el i foroverregulaor Bruke kun ve P og PI me D-foroverregulering. 20
105 Structure Laer/FBD Data Name : PD-regulator koblet D-regulator forrige amplingpul, reultatet legge riabelen og legger reultatet i for D-el i foroverregulaor 21
106 Structure Laer/FBD Data Name : PD-regulator 4 Foroverkoblet PD-regulator (Dff) NB!! Bruke kun ve P og PI me Tff[0] U_Dff_array[0] 1 2 DMUL HJ7 Forterker forrige påraget fra foroverkoblet D-regulator forrige amplingpul. Flowmåling_D Flowmåling_array[0] 1 2 DSUB Fortyrrele_V Enring i flow legge i Fortyrrele_V. Fortyrrele_V KpffD 1 2 DMUL HJ9 Forterker foryrreleenringen me Kpff. HJ7[0] HJ9[0] 1 2 DADD HJ10 Summerer e to biragene ovenfor. Samplingti_h_10D Tff[0] 1 2 DADD HJ11 Summerer amplingti me hjelpevariabelen og legger reultatet i HJ11. HJ10 HJ DDIV HJ12 Heltalkorrekjonen gjør eg elv etterom Kpff er i bruk. HJ12[0] DMOV U_PDff_D Kopierer innholet i HJ6[0] til pårag for D-el i foroverregulaor koblet D-regulator forrige riabelen og legger reultatet i for D-el i foroverregulaor 22
107 Structure Laer/FBD Data Name : PI-regulator 1 Her ligger PI-ragulatoren. Kjøre kun ve valg av PI-regulator Den er byg opp av Globale variabler og flere Lokale variabler kalt HJ. Påraget fra regulatoren ene til "Pårag" POU om U_PI. Se i entankrapporten for regulatoralgoritme Når vi multiplierer eller ivierer 32bit blir reultatet 64bit. 64bit kan ikke bruke av noe intrukjon irekte, erfor er e aktuelle hjelpevariablene opprettet om 2 array av 32bit. For å kunne bruke kun 32bit av 64bit inekerer vi ette me klammer. Fek HJ[0]. kunne bruke kun 32bit av 64bit 2 Her er forbereeler til kjøring av PI-regulator erom P-regulator kjøre. Forbereelene gjøre for å få rykkfrie overganger PI_REG PLS VentilpåragD DMOV Ventilpårag_array[0] Flytter veri èn gang ve valg av PI-reg (rykkfri overgang) Pårag = Forrigepårag veri èn gang ve valg av PI-reg 3 MANUELL P_REG Til_P p CJ Hopper fra PI til P-reg når bruker trykker på P-reg-knapp i InTouch, Hopper ogå når Manuellknappen er "Høy" Da hopper vi over hele PI-regulatoren. Bortett fra network 2 r fra PI til P-reg når bruker trykker eg-knapp i InTouch, r ogå når Manuellknappen er pper vi over hele PI-regulatoren. 23
108 Structure Laer/FBD Data Name : PI-regulator 4 Ti_10D Samplingti_h_10D PI_REG PLS 1 2 DDIV M8003 AND HJ0 Hopp p CJP HJ0: Operatør tater inn ønket Ti og amplingti, InTouch multiplierer Ti og amplingti me 10 før Ti ene ne til PLS. Må lage en hjelpevariabel fori Ti > h ----> h/ti = 0. NB!!! Faktoren på 10 forvinner ve iviering, ette må korigere ve bruk av HJ0 Gjøre kun førte cann ve valg av PI-reulator NB! Skal ogå gjøre èn gang ve bytte fra manuell/p-reg til PI-reg. I forterkning Delta_Uik og Delta_Uik_ret Kp_10D Avvik_e HJ0[0] DMUL DMUL HJ3 HJ4 Delta_Uik = (Kp_10*e_k)/(Tih*10) =ifferane fra forrige ampling for I forterking :: Ref Entankraport-regulatoralgoritmer. Delta_Uik_ret = (Kp_10*e_k)%(Tih*10) =ifferane fra forrige ampling for I forterking (ret) :: Ref Entankraport-regulatoralgoritmer. Forterker avviket me Kp (Kp_10*e_k) = HJ3 Multiplierer HJ0 me 10 for å korrigere for ivijonen av HJ0 (Tih*10) = HJ4 HJ3[0] HJ4[0] 1 2 DDIV HJ5 (Kp_10*e_k)/(Tih*10) = HJ5 Heltalel ligger i: HJ5[0] Retel ligger i : HJ5[1] HJ5[0] DMOV Differane pårag fra I-forterkning (Heltallel ----> Delta_Uik HJ5[0]) Legge i egen array HJ5[1] DMOV Differane pårag fra I-forterkning (Ret ----> HJ5[1]) Delta_Uik_ret 24
109 Structure Laer/FBD Data Name : PI-regulator amplingti, InTouch multiplierer e iviering, ette må korigere ve valg av PI-reulator gang ve bytte fra manuell/p-reg til rrige ampling for I forterking :: t-regulatoralgoritmer. (Kp_10*e_k)%(Tih*10) rrige ampling for I forterking kraport-regulatoralgoritmer. me 10 for å korrigere for g fra I-forterkning (Heltallel ----> g fra I-forterkning (Ret ----> 25
110 Structure Laer/FBD Data Name : PI-regulator 5 Hopp: PI_REG PLS M8003 AND Hopp1 p CJP Gjøre ikke førte cann, men alle påfølgene cann. NB! Skal ogå Hoppe over èn gang ve valg av PI-reglator. I forterkning Delta_Uik og Delta_Uik_ret Delta_Uik = (Kp_10*e_k+Delta_Ui_ret_k-1)/(Tih*10) =ifferane fra forrige ampling for I forterking :: Delta_Uik_ret = (Kp_10*e_k+Delta_Ui_ret_k-1)%(Tih*10) =ifferane fra forrige ampling for I forterking Kp_10D Avvik_e 1 2 DMUL HJ6 Forterker avviket me Kp (Kp_10*e_k) = HJ6 HJ6[0] Delta_Uik_ret_array[0] 1 2 DADD HJ7 (Kp_10*e_k+Delta_Ui_ret_k-1) = HJ7 HJ0[0] DMUL HJ8 Multiplierer HJ0 me 10 for å korrigere for ivijonen av HJ0 (Tih*10) = HJ8 HJ7 HJ8[0] 1 2 DDIV HJ9 (Kp_10*e_k+Delta_Ui_ret_k-1)/(Tih*10) = HJ9 Heltalel ligger i: HJ9[0] Retel ligger i : HJ9[1] HJ9[0] DMOV Differane pårag fra I-forterkning (Heltallel ----> Delta_Uik HJ9[0]) Legge i egen array HJ9[1] DMOV Differane pårag fra I-forterkning (Ret ----> Delta_Uik_ret HJ9[1]) Legge i egen array 26
111 Structure Laer/FBD Data Name : PI-regulator cann, men alle påfølgene oppe over èn gang ve valg av lta_ui_ret_k-1)/(tih*10) rrige ampling for I forterking :: lta_ui_ret_k-1)%(tih*10) rrige ampling for I forterking lta_ui_ret_k-1) = HJ7 me 10 for å korrigere for lta_ui_ret_k-1)/(tih*10) = HJ9 g fra I-forterkning (Heltallel ----> g fra I-forterkning (Ret ----> 6 Hopp1: P-forterkning Delta_Pk Delta_Pk = Kp_10(ek-e(k-1))/10 Avvik_e Avvik_e_array[0] 1 2 DSUB HJ10 Differane fra forrige ampling for P forterking (ek-e(k-1)) = HJ10 HJ10 Kp_10D 1 2 DMUL HJ11 Forterker avvikifferanen Kp_10(ek-e(k-1)) = HJ11 HJ11[0] DDIV HJ12 Deler på 10 for å gjøre opp for 10xKp Kp_10(ek-e(k-1))/10 HJ12[0] DMOV Delta_Pk Differane P-pårag 27
112 Structure Laer/FBD Data Name : PI-regulator rige ampling for P forterking gjøre opp for 10xKp 7 PI-regulator me bakoverifferen Ventilpårag_array[0] Delta_Uik_array[0] HJ13 Delta_Pk_array[0] DADD DADD HJ13 HJ14 Forrige pårag +ifferane fra forrige ampling for I pårag =HJ3 HJ3 +ifferane fra forrige ampling for P pårag =HJ4 HJ14 DMOV U_PI =U_PI pårag rrige ampling for I pårag rrige ampling for P pårag 8 Til_P: 28
113 Structure Laer/FBD Data Name : Pårag 1 Her kombinere regulatorpåragene fra e forkjellige regulatortypene valgt av operatør, for å å bli ent ut til DAkortet om ventilpårag. POU er byg opp av Globale variabler og flere Lokale variabler kalt HJ. Når vi multiplierer eller ivierer 32bit blir reultatet 64bit. 64bit kan ikke bruke av noe intrukjon irekte, erfor er e aktuelle hjelpevariablene opprettet om 2 array av 32bit. For å kunne bruke kun 32bit av 64bit inekerer vi ette me klammer. Fek HJ[0]. 1. Jump avhengig av hvilken regulatortype om er valgt. 2. Ventilpårag = pårag fra Regulator + evt. foroverkobling 3. Grenejekk{ erom Pårag > > Pårag = 255 erom Pårag < > Pårag = 0 } 4. Kopierer påraget til kiftregitrene for rykkfri overgang og antiwinup 5. Konverterer påraget til riktig imenjon for DA konvertering og kjører til P_REG Pff_REG Dff_REG PDff_REG H_0 p CJ P-regulator U_P GrenejekkD_1 GrenejekkD Input Output U_P U_P U_P DMOV _DINT DINT_TO_INT VentilpåragD Ventilpårag 2 H_0: PI_REG Pff_REG Dff_REG PDff_REG H_1 p CJ PI-regulator U_PI GrenejekkD_2 GrenejekkD Input Output U_PI U_PI DMOV VentilpåragD U_PI _DINT DINT_TO_INT Ventilpårag 3 H_1: MANUELL H_2 p CJ Manuell-regulering U_mD DMOV VentilpåragD U_m MOV Ventilpårag 29
114 Structure Laer/FBD Data Name : Pårag 30 4 H_2: p CJ P_REG Pff_REG P-regulator me P-foroverkobling H_3 1 2 DADD U_P U_P_Pff U_Pff Input Output GrenejekkD GrenejekkD_3 U_P_Pff U_P_Pff DMOV U_P_Pff VentilpåragD _DINT DINT_TO_INT U_P_Pff Ventilpårag 5 H_3: p CJ P-regulator me D-foroverkobling P_REG Dff_REG H_4 1 2 DADD U_P U_P_Dff U_Dff Input Output GrenejekkD GrenejekkD_4 U_P_Dff U_P_Dff DMOV U_P_Dff VentilpåragD _DINT DINT_TO_INT U_P_Dff Ventilpårag 6 H_4: P-regulator me PD-foroverkobling p CJ P_REG PDff_REG H_5 1 2 DADD U_P U_P_Pff_PD U_Pff 1 2 DADD U_P_Pff_PD U_P_PDff U_PDff_D Input Output GrenejekkD GrenejekkD_5 U_P_PDff U_P_PDff DMOV U_P_PDff VentilpåragD _DINT DINT_TO_INT U_P_PDff Ventilpårag
115 Structure Laer/FBD Data Name : Pårag 31 7 H_5: PI-regulator me P-foroverkobling p CJ PI_REG Pff_REG H_6 1 2 DADD U_PI U_PI_Pff U_Pff Input Output GrenejekkD GrenejekkD_6 U_PI_Pff U_PI_Pff DMOV U_PI_Pff VentilpåragD _DINT DINT_TO_INT U_PI_Pff Ventilpårag 8 H_6: p CJ PI_REG Dff_REG PI-regulator me D-foroverkobling H_7 1 2 DADD U_PI U_PI_Dff U_Dff Input Output GrenejekkD GrenejekkD_7 U_PI_Dff U_PI_Dff DMOV U_PI_Dff VentilpåragD _DINT DINT_TO_INT U_PI_Dff Ventilpårag 9 H_7: PI-regulator me PD-foroverkobling p CJ PI_REG PDff_REG H_8 1 2 DADD U_PI U_PI_Pff_PD U_Pff 1 2 DADD U_PI_Pff_PD U_PI_PDff U_PDff_D Input Output GrenejekkD GrenejekkD_9 U_PI_PDff U_PI_PDff DMOV U_PI_PDff VentilpåragD _DINT DINT_TO_INT U_PI_PDff Ventilpårag 10 H_8:
116 Structure Laer/FBD Data Name : Regulatorkonfig 1 Her ligger knappeintrukjonene fra HMI Motta i et regiter om konvertere til et bit-array. Logikken for knappefunkjonene er krevet her 2 KNAPPER 16 INT_TO_BITARR BitArr n* KNAPPER_Bool_array[0] Knappearrangement: KNAPPER_Bool_array[0] = PI-reg KNAPPER_Bool_array[1] = P-reg KNAPPER_Bool_array[2] = Manuell KNAPPER_Bool_array[3] = Direkte reg KNAPPER_Bool_array[4] = Reverert reg KNAPPER_Bool_array[5] = P forover reg KNAPPER_Bool_array[6] = D forover reg KNAPPER_Bool_array[7] = PD forover reg KNAPPER_Bool_array[8] = All OFF 3 Manuell/Auto KNAPPER_Bool_array[2] PLS P_REG PI_REG P_HJ S PI_HJ S Tar vare på regulatorkonfigurajon ve valg av manuell. Dette gjøre for at ve valg av Auto huker vi hvilke regulatortyper vi hae før manuel kjøring Pff_REG Pff_HJ S Dff_REG Dff_HJ S PDff_REG PDff_HJ S 32
117 Structure Laer/FBD Data Name : Regulatorkonfig 4 Regulatorvalg KNAPPER_Bool_array[0] KNAPPER_Bool_array[9] PLS PI_HJ PI_REG S PI-regulator Sette ve knapp fra HMI eller ve lagret intilling KNAPPER_Bool_array[9] PLS P_HJ P-regulator KNAPPER_Bool_array[1] P_REG S Sette ve knapp fra HMI eller ve lagret intilling KNAPPER_Bool_array[5] KNAPPER_Bool_array[9] PLS Pff_HJ Pff_REG S Foroverkoblet P-regulator Sette ve knapp fra HMI eller ve lagret intilling KNAPPER_Bool_array[9] PLS Dff_HJ Foroverkoblet D-regulator KNAPPER_Bool_array[6] Dff_REG S Sette ve knapp fra HMI eller ve lagret intilling KNAPPER_Bool_array[9] PLS PDff_HJ Foroverkoblet PD-regulator KNAPPER_Bool_array[7] PDff_REG S Sette ve knapp fra HMI eller ve lagret KNAPPER_Bool_array[2] KNAPPER_Bool_array[3] KNAPPER_Bool_array[4] MANUELL S Direkte_reg S Reverert_reg S Manuell-regulator Direkte-regulator Reverert-regulator Pff_REG Forover_REG Inikator på foroverregulering Dff_REG Bruke i PD-regulator POU PDff_REG 33
118 Structure Laer/FBD Data Name : Regulatorkonfig 5 Logikk for valg av regulatortype Knappearrangement: KNAPPER_Bool_array[0] = PI-reg KNAPPER_Bool_array[1] = P-reg KNAPPER_Bool_array[2] = Manuell KNAPPER_Bool_array[3] = Direkte reg KNAPPER_Bool_array[4] = Reverert reg KNAPPER_Bool_array[5] = P forover reg KNAPPER_Bool_array[6] = D forover reg KNAPPER_Bool_array[7] = PD forover reg KNAPPER_Bool_array[8] = All OFF KNAPPER_Bool_array[9] MANUELL R Auto reetter Manuell-reg KNAPPER_Bool_array[1] PI_REG R P-reg og Manuell-reg reetter PI-reg KNAPPER_Bool_array[2] KNAPPER_Bool_array[0] P_REG R PI-reg og Manuell-reg reetter P-reg KNAPPER_Bool_array[2] KNAPPER_Bool_array[4] KNAPPER_Bool_array[3] Direkte_reg R Reverert_reg R Reverert-reg reetter Direkte-reg Reverert-reg reetter Direkte-reg KNAPPER_Bool_array[6] KNAPPER_Bool_array[7] Pff_REG R Dff-reg, PDff-reg og All ff OFF reetter Pff-reg. KNAPPER_Bool_array[8] KNAPPER_Bool_array[5] KNAPPER_Bool_array[7] Dff_REG R Pff-reg, PDff-reg og All ff OFF reetter Dff-reg. KNAPPER_Bool_array[8] KNAPPER_Bool_array[5] KNAPPER_Bool_array[6] PDff_REG R Pff-reg, Dff-reg og All ff OFF reetter PDff-reg. KNAPPER_Bool_array[8] KNAPPER_Bool_array[9] PLS P_HJ R PI_HJ R Reetter en lagree regulatorkonfigurajon lagret i hjelpevariable ve valg av auto. på enne måten blir et gjort klart for ny lagring. Pff_HJ R Dff_HJ R PDff_HJ R 34
119 Structure Laer/FBD Data Name : Regulatorkonfig ool_array[0] = PI-reg ool_array[1] = P-reg ool_array[2] = Manuell ool_array[3] = Direkte reg ool_array[4] = Reverert ool_array[5] = P forover reg ool_array[6] = D forover reg ool_array[7] = PD forover ool_array[8] = All OFF ll-reg reetter PI-reg ll-reg reetter P-reg og All ff OFF reetter Pff-reg. og All ff OFF reetter Dff-reg. g All ff OFF reetter PDff-reg. ree regulatorkonfigurajon iable ve valg av auto. på r et gjort klart for ny lagring. 35
120 Structure Laer/FBD Data Name : Reverert_og_irekte-reg 1 Her beregne avvik e på grunnlag av hva lag regulator om er valgt, reverert eller irekte ref. reguleringalgoritmer entankrapport 2 Reverert_reg ReferaneD Nivåmåling_array[0] 1 2 DSUB Avvik_e Beregning av avvik for Reverert regulator. Direkte_reg Nivåmåling_array[0] ReferaneD 1 2 DSUB HJ1 HJ DMUL HJ2 HJ2[0] DMOV Avvik_e Beregning av avvik for Direkte regulator. Fortegnet kifter fortegn ve irekte regulator, korrigerer ette me å multipliere me -1. g av avvik for Reverert g av avvik for Direkte regulator. t kifter fortegn ve irekte r, korrigerer ette me å 36
121 Structure Laer/FBD Data Name : Skiftregitere 1 Skiftregiter: Tar vare på verier opp til to amplingteg tilbake i ti. Veriene lagre for bruk i regulatorene. 1. får inn en nåveri 2. Legge over i tilhørene array på amplingpul 3. Flytte til nete pla i array på nete amplingpul Foreling på array; planr [0] inneholer forrigeveri plant [1] inneholer forrige forrigeveri 2 M8002 RST V0 Reetter tellevariabelen for arrayene V0 ve RUN iabelen for arrayene V0 ve RUN 3 Symetrik taktgiver. TS0 TC0 Samplingti_h_10 OUT_T TCoil TValue Frekvenen betemme av Samplingti_h *100m TS0 M0 M0 TS0 M0 emme av Samplingti_h *100m 4 Tar vare på ventilpåraget(32bit) for gjenbruk i regulatorene DMOV Ventilpårag_array[0] Ventilpårag_array[1] M0 PLS VentilpåragD DMOV Ventilpårag_array[0] 37
122 ilpåraget(32bit) for gjenbruk i Structure Laer/FBD Data Name : Skiftregitere 5 Tar vare på ventilpåraget Ventilpårag_arrayW[0] MOV Ventilpårag_arrayW[1] M0 PLS Ventilpårag MOV Ventilpårag_arrayW[0] 6 Nivåmåling_array[0] DMOV Nivåmåling_array[1] M0 PLS Nivåmåling_D DMOV Nivåmåling_array[0] 7 Flowmåling_array[0] DMOV Flowmåling_array[1] M0 PLF Flowmåling_D DMOV Flowmåling_array[0] 8 Avvik_e_array[0] DMOV Avvik_e_array[1] M0 PLS Avvik_e DMOV Avvik_e_array[0] 9 Enring i pårag fra I-el i PI-regulator fra forrige amplingpul DMOV Delta_Uik_array[0] Delta_Uik_array[1] M0 PLS Delta_Uik DMOV Delta_Uik_array[0] fra I-el i PI-regulator fra forrige 38
123 Structure Laer/FBD Data Name : Skiftregitere 10 Reten til enringen i pårag fra I-el i PI-regulator fra forrige amplingpul DMOV Delta_Uik_ret_array[0] Delta_Uik_ret_array[1] M0 PLS Delta_Uik_ret DMOV Delta_Uik_ret_array[0] gen i pårag fra I-el i PI-regulator 11 Enringen i pårag fra P-el i PI-regulator fra forrige amplingpul DMOV Delta_Pk_array[0] Delta_Pk_array[1] M0 PLS Delta_Pk DMOV Delta_Pk_array[0] rag fra P-el i PI-regulator fra 12 Enring i flow fra forrige amplingpul Fortyrrele_V_array[0] DMOV Fortyrrele_V_array[1] M0 PLS Fortyrrele_V DMOV Fortyrrele_V_array[0] forrige amplingpul 13 U_Dff_array[0] DMOV U_Dff_array[1] M0 PLS U_Dff DMOV U_Dff_array[0] 14 Derom V0 er tørre enn 1 ette V0 = 0 V0 kifter veri mellom 0 og 1 på amplingpul M0 PLF INC LD> MOV V V0 V0 39
124 rre enn 1 ette V0 = 0 ellom 0 og 1 på amplingpul Structure Laer/FBD Data Name : Skiftregitere 40
125 Structure Laer/FBD Data Name : Wor_to_Double 1 2 Konvertering fra 16 til 32bit De veriene vi henter fra profibu er av 16bit. Må konvertere ie til 32bit for å kunne Kp_10 Ti_10 T Referane Kpff Nominelt_pårag_u0 U_m Nivåmåling Samplingti_h_10 Flowmåling T_n _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT Kp_10D Ti_10D TD ReferaneD KpffD Nominelt_pårag_u0D U_mD Nivåmåling_D Samplingti_h_10D Flowmåling_D T_nD 41
126 FB/FUN Program Data Name : Enhetkonvertering Function Block 1 FB konverterer fra til me maximalt avvik Input _INT INT_TO_DINT HJ1 HJ DMUL HJ2 HJ2[0] DDIV HJ3 Heltallreultat i HJ[0] + ret i HJ3[1] HJ3[1] 10 HJ4[0] DMUL DDIV HJ4 HJ5 LDD> DADD HJ5[0] 1 HJ3[0] 1 HJ3[0] Sjekker om eimaltallet er tørre enn 5 Derom en er tørre enn 5 legge et til 1 på heltallvaret på enne måten begrene avviket i en totale beregningen HJ3[0] _DINT DINT_TO_INT Output 42
127 FB/FUN Program Data Name : Enhetkonvertering Function Block ltat i HJ[0] + ret i HJ3[1] Sjekker om eimaltallet er tørre Derom en er tørre enn 5 legge et til 1 på heltallvaret på enne måten begrene avviket i en totale beregningen 43
128 FB/FUN Program Data Name : GrenejekkD Function Block 1 LDD> DMOV Derom: 254 < input => output = 255 Input Output LDD< DMOV Input 1 0 Output 1 2 Derom: 0 > input => output = 0 om: 254 < input => output = 255 om: 0 > input => output = 0 44
129 Label Data Name : Global1 Global Label Setting Cla Label Name Data Type Contant Device Are Comment Remark Relation with Sytem Label Sytem Label Name Attribute 1 VAR_GLOBAL Kp_10 Wor[Signe] D200 %MW0.200 P-Forterkning erieregulator Batterimate!!!!! 2 VAR_GLOBAL Kp_10D Double Wor[Signe] D1 %MD0.1 P-Forterkning erieregulator 3 VAR_GLOBAL Ti_10 Wor[Signe] D203 %MW0.203 Integrajonti erieregulator Batterimate!!!!! 4 VAR_GLOBAL Ti_10D Double Wor[Signe] D4 %MD0.4 Integrajonti erieregulator 5 VAR_GLOBAL Kpff Wor[Signe] D206 %MW0.206 P-forterkning foroverkobling Batterimate!!!!! 6 VAR_GLOBAL KpffD Double Wor[Signe] D7 %MD0.7 P-forterkning foroverkobling 7 VAR_GLOBAL T Wor[Signe] D209 %MW0.209 Derivajonti foroverkobling Batterimate!!!!! 8 VAR_GLOBAL TD Double Wor[Signe] D10 %MD0.10 Derivajonti foroverkobling 9 VAR_GLOBAL T_n Wor[Signe] D212 %MW0.212 Filterkontant foroverkobling Batterimate!!!!! 10 VAR_GLOBAL T_nD Double Wor[Signe] D13 %MD0.13 Filterkontant foroverkobling 11 VAR_GLOBAL Nominelt_pårag_u0 Wor[Signe] D215 %MW0.215 Nominelt pårag Batterimate!!!!! 12 VAR_GLOBAL Nominelt_pårag_u0D Double Wor[Signe] D16 %MD0.16 Nominelt pårag 13 VAR_GLOBAL Samplingti_h_10 Wor[Signe] D218 %MW0.218 Ti mellom hver ampling (0.5ek) Batterimate!!!!! 14 VAR_GLOBAL Samplingti_h_10D Double Wor[Signe] D19 %MD0.19 Ti mellom hver ampling (0,5ek) 15 VAR_GLOBAL Referane Wor[Signe] D221 %MW0.221 Referane att av operatør Batterimate!!!!! 16 VAR_GLOBAL ReferaneD Double Wor[Signe] D22 %MD0.22 Referane att av operatør VAR_GLOBAL KNAPPER Wor[Signe] D224 %MW VAR_GLOBAL KNAPPER_Bool_array Bit(0..15) M10 %MX0.10 Batterimater knappeintrukjonene Batterimate!!!!! 21 VAR_GLOBAL P_REG Bit M30 %MX0.30 Knapp for P regulator 22 VAR_GLOBAL PI_REG Bit M31 %MX0.31 Knapp for PI regulator 23 VAR_GLOBAL MANUELL Bit M32 %MX0.32 Knapp for manuell regulator 24 VAR_GLOBAL Pff_REG Bit M33 %MX0.33 Knapp for P regulator i foroverkobling 25 VAR_GLOBAL Dff_REG Bit M34 %MX0.34 Knapp for D regulator i foroverkobling 26 VAR_GLOBAL PDff_REG Bit M36 %MX0.36 Knapp for PD regulator i foroverkobling 27 VAR_GLOBAL Reverert_reg Bit M37 %MX0.37 Knapp for reverert regulator 28 VAR_GLOBAL Direkte_reg Bit M38 %MX0.38 Knapp for irekte regulator 29 VAR_GLOBAL Forover_REG Bit M39 %MX0.39 Knapp for foroverregulering VAR_GLOBAL Ventilpårag Wor[Signe] D25 %MW0.25 Pårag fra angitt regulator 33 VAR_GLOBAL VentilpåragD Double Wor[Signe] D26 %MD0.26 Pårag fra angitt regulator 34 VAR_GLOBAL Ventilpårag_array Double Wor[Signe](0..1) D228 %MD0.228 Array for pårag fra regulator. Nåveri i 0, Forrige veri i 1 ov. 35 VAR_GLOBAL Nivåmåling Wor[Signe] D32 %MW0.32 Målt analog veri fra trykktranmitter.ad-kanal 0 36 VAR_GLOBAL Nivåmåling_D Double Wor[Signe] D33 %MD0.33 Målt analog veri fra trykktranmitter.ad-kanal 0 37 VAR_GLOBAL Nivåmåling_array Double Wor[Signe](0..1) D35 %MD0.35 Array for nivåmåling. Nåveri i 0, Forrige veri i 1 ov. 38 VAR_GLOBAL Flowmåling Wor[Signe] D39 %MW0.39 Målt analog veri fra flowmåler.ad-kanal 1 39 VAR_GLOBAL Flowmåling_D Double Wor[Signe] D40 %MD0.40 Målt analog veri fra flowmåler.ad-kanal 1 40 VAR_GLOBAL Flowmåling_array Double Wor[Signe](0..1) D42 %MD0.42 Array for flowmåling. Nåveri i 0, Forrige veri i 1 ov. 41 VAR_GLOBAL Avvik_e Double Wor[Signe] D46 %MD0.46 Avvik, r-y 42 VAR_GLOBAL Avvik_e_array Double Wor[Signe](0..1) D48 %MD0.48 Array for avvik.nåveri i 0, Forrige veri i 1 ov. 43 VAR_GLOBAL Delta_Uik Double Wor[Signe] D52 %MD0.52 Hjelpevariabel. Ref.Sanntiatateknikk ie VAR_GLOBAL Delta_Uik_array Double Wor[Signe](0..1) D54 %MD0.54 Hjelpevariabel. Ref.Sanntiatateknikk ie VAR_GLOBAL Delta_Uik_ret Double Wor[Signe] D58 %MD VAR_GLOBAL Delta_Uik_ret_array Double Wor[Signe](0..1) D60 %MD0.60 Hjelpevariabel. Ref.Sanntiatateknikk ie VAR_GLOBAL Delta_Pk Double Wor[Signe] D64 %MD0.64 Hjelpevariabel. Ref.Sanntiatateknikk ie VAR_GLOBAL Delta_Pk_array Double Wor[Signe](0..1) D66 %MD0.66 Hjelpevariabel array. Ref.Sanntiatateknikk ie VAR_GLOBAL U_P Double Wor[Signe] D70 %MD0.70 Pårag fra P-regulator 50 VAR_GLOBAL U_P_array Double Wor[Signe](0..1) D72 %MD0.72 Array for pårag fra P-regulator 51 VAR_GLOBAL U_PI Double Wor[Signe] D76 %MD0.76 Pårag fra PI-regulator 52 VAR_GLOBAL U_PI_array Double Wor[Signe](0..1) D78 %MD0.78 Array for pårag fra P-regulator 53 VAR_GLOBAL U_Pff Double Wor[Signe] D82 %MD0.82 Pårag fra Pff-regulator 54 VAR_GLOBAL U_Pff_array Double Wor[Signe](0..1) D84 %MD0.84 Array for pårag fra Pff-regulator 55 VAR_GLOBAL U_Dff Double Wor[Signe] D88 %MD0.88 Pårag fra Dff-regulator 56 VAR_GLOBAL U_Dff_array Double Wor[Signe](0..1) D90 %MD0.90 Array for pårag fra Dff-regulator 57 VAR_GLOBAL U_PDff_D Double Wor[Signe] D94 %MD0.94 Array for pårag fra Dff-regulator 58 VAR_GLOBAL U_PI_Pff Double Wor[Signe] D96 %MD0.96 Pårag fra PI + Pff-regulator 59 VAR_GLOBAL U_PI_Pff_array Double Wor[Signe](0..1) D98 %MD0.98 Array for pårag fra PI+ Pff-regulator 60 VAR_GLOBAL U_PI_Dff Double Wor[Signe] D102 %MD0.102 Pårag fra PI + Dff-regulator 61 VAR_GLOBAL U_PI_Dff_array Double Wor[Signe](0..1) D104 %MD0.104 Array for pårag fra PI + Dff-regulator 62 VAR_GLOBAL U_PI_PDff Double Wor[Signe] D108 %MD0.108 Pårag fra PI + PDff-regulator 63 VAR_GLOBAL U_PI_PDff_array Double Wor[Signe](0..1) D110 %MD0.110 Array for pårag fra PI + PDff-regulator 64 VAR_GLOBAL Fortyrrele_V Double Wor[Signe] D114 %MD0.114 Fortyrrelen Vk i flowmålinga 65 VAR_GLOBAL Fortyrrele_V_array Double Wor[Signe](0..1) D116 %MD0.116 Array for fortyrrelen Vk i flowmålinga VAR_GLOBAL U_m Wor[Signe] D120 %MW0.120 ManuellPårag 68 VAR_GLOBAL U_mD Double Wor[Signe] D121 %MD0.121 ManuellPårag 69 VAR_GLOBAL Ventilpårag_arrayW Wor[Signe](0..1) D124 %MW0.124 Array for pårag fra regulator. Nåveri i 0, Forrige veri i 1 ov VAR_GLOBAL Tilbakemeling Bit(0..15) M50 %MX0.50 Array me tilbakemeling på hvilke regulatorer om er aktive 72 VAR_GLOBAL Tilbakemeling_W Wor[Signe] D130 %MW0.130 Dataregiter me tilbakemeling på hvilke regulatorer om er aktive VAR_GLOBAL HøyAlarm_tank1 Bit M70 %MX = Alarm for høyt nivå har gått 75 VAR_GLOBAL LavAlarm_tank1 Bit M71 %MX = Alarm for lav nivå har gått 76 VAR_GLOBAL AvvikAlarm_tank1 Bit M72 %MX = Alarm for tort avvik har gått 77 VAR_GLOBAL Alarmkvittering_tank1 Bit M73 %MX = Alarmen er kvittert ut VAR_GLOBAL HøyAlarm_tank2 Bit M74 %MX = Alarm for høyt nivå har gått 80 VAR_GLOBAL LavAlarm_tank2 Bit M75 %MX = Alarm for lav nivå har gått 81 VAR_GLOBAL AvvikAlarm_tank2 Bit M76 %MX = Alarm for tort avvik har gått 82 VAR_GLOBAL Alarmkvittering_tank2 Bit M77 %MX = Alarmen er kvittert ut VAR_GLOBAL Alarmlampe1 Bit M78 %MX VAR_GLOBAL Alarmlampe2 Bit M79 %MX VAR_GLOBAL Lampe Bit Y005 %QX VAR_GLOBAL Nivå_tank2 Wor[Signe] D140 %MW VAR_GLOBAL Avvik_tank2 Wor[Signe] D142 %MW VAR_GLOBAL huk_høy_alarm_tank1 Bit M80 %MX0.80 Huker høy alarm helt til en er kvittert ut 93 VAR_GLOBAL huk_lav_alarm_tank1 Bit M81 %MX0.81 Huker lav alarm helt til en er kvittert ut 94 VAR_GLOBAL huk_avvikalarm_tank1 Bit M82 %MX0.82 Huker avvik alarm helt til en er kvittert ut 95 VAR_GLOBAL Feilkvittering_tank1 Bit M83 %MX = Alarmen er kvittert ut, alarmtilan aktiv VAR_GLOBAL huk_høy_alarm_tank2 Bit M84 %MX0.84 Huker høy alarm helt til en er kvittert ut 98 VAR_GLOBAL huk_lav_alarm_tank2 Bit M85 %MX0.85 Huker lav alarm helt til en er kvittert ut 99 VAR_GLOBAL huk_avvikalarm_tank2 Bit M86 %MX0.86 Huker avvik alarm helt til en er kvittert ut 100 VAR_GLOBAL Feilkvittering_tank2 Bit M87 %MX = Alarmen er kvittert ut, alarmtilan aktiv 101 VAR_GLOBAL Kritik_Alarm Bit M88 %MX VAR_GLOBAL KvittAlarmer_pumpe_MV123 Wor[Signe] D300 %MW VAR_GLOBAL KvittAlarmer_pumpe_MV_arr Bit(0..15) M90 %MX VAR_GLOBAL Tilbakemeling_mv_pu Bit(0..15) M110 %MX VAR_GLOBAL Tilbakemeling_mv_pu_1 Wor[Signe] D151 %MW
130 Label Data Name : Alarm_tank1 Local Label Setting Cla Label Name Data Type Contant Device Are Comment 6 VAR KritikHøy Bit Proeverien er kritik høy, over 90% 7 VAR KritikLav Bit Proeverien er kritik lav, uner 10% 8 VAR HøytAvvik Bit Avviket er for tort, 25% avvik 46
131 Label Data Name : Alarm_tank2 Local Label Setting Cla Label Name Data Type Contant Device Are Comment 6 VAR KritikHøy Bit Proeverien er kritik høy, over 90% 7 VAR KritikLav Bit Proeverien er kritik lav, uner 10% 8 VAR HøytAvvik Bit Avviket er for tort, 25% avvik 47
132 Label Data Name : Alarmakjoner Local Label Setting Cla Label Name Data Type Contant Device Are Comment 48
133 Label Data Name : Input Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR Ref_proent Wor[Signe] Leet veri fra HMI (%) 2 VAR U_manuell_proent Wor[Signe] Leet veri fra HMI (%) 49
134 Label Data Name : Manuell_Auto Local Label Setting Cla Label Name Data Type Contant Device Are Comment 50
135 Label Data Name : Output Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR Nivå_proent Wor[Signe] Ingeniørenheter om kal ene til mater 2 VAR Ventilpårag_proent Wor[Signe] Ingeniørenheter om kal ene til mater 3 VAR ref_proent Wor[Signe] Ingeniørenheter om kal ene til mater 4 VAR Enhetkonvertering_1 Enhetkonvertering Bruk av funkjonblokk 5 VAR Enhetkonvertering_2 Enhetkonvertering Bruk av funkjonblokk 6 VAR Enhetkonvertering_3 Enhetkonvertering Bruk av funkjonblokk 51
136 Label Data Name : P-regulator Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR HJ3 Double Wor[Signe](0..1) Forterket avvik 2 VAR HJ4 Double Wor[Signe](0..1) Korrigert veri mtp heltalproblematikk 52
137 Label Data Name : PD-regulator Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR Tff Double Wor[Signe](0..1) 2 VAR HJ1 Double Wor[Signe](0..1) 3 VAR HJ2 Double Wor[Signe] 4 VAR HJ3 Double Wor[Signe](0..1) 5 VAR HJ4 Double Wor[Signe] 6 VAR HJ5 Double Wor[Signe] 7 VAR HJ6 Double Wor[Signe](0..1) 8 VAR HJ7 Double Wor[Signe](0..1) 9 VAR HJ8 Double Wor[Signe] 10 VAR HJ9 Double Wor[Signe](0..1) 11 VAR HJ10 Double Wor[Signe] 12 VAR HJ11 Double Wor[Signe] 13 VAR HJ12 Double Wor[Signe](0..1) 14 VAR HJ13 Double Wor[Signe](0..1) 15 VAR HJ14 Double Wor[Signe](0..1) 16 VAR HJ15 Double Wor[Signe] 53
138 Label Data Name : PI-regulator Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR HJ0 Double Wor[Signe](0..1) Ti_h ligger i HJ0[0] 2 VAR HJ1 Double Wor[Signe] 3 VAR HJ2 Double Wor[Signe](0..1) 4 VAR HJ3 Double Wor[Signe](0..1) 5 VAR HJ4 Double Wor[Signe](0..1) 6 VAR HJ5 Double Wor[Signe](0..1) 7 VAR HJ6 Double Wor[Signe](0..1) 8 VAR HJ7 Double Wor[Signe] 9 VAR HJ8 Double Wor[Signe](0..1) 10 VAR HJ9 Double Wor[Signe](0..1) 11 VAR HJ10 Double Wor[Signe] 12 VAR HJ11 Double Wor[Signe](0..1) 13 VAR HJ12 Double Wor[Signe](0..1) 14 VAR HJ13 Double Wor[Signe] 15 VAR HJ14 Double Wor[Signe] 54
139 Label Data Name : Pårag Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR GrenejekkD_1 GrenejekkD 2 VAR GrenejekkD_2 GrenejekkD 3 VAR GrenejekkD_3 GrenejekkD 4 VAR GrenejekkD_4 GrenejekkD 5 VAR GrenejekkD_5 GrenejekkD 6 VAR GrenejekkD_6 GrenejekkD 7 VAR GrenejekkD_7 GrenejekkD 8 VAR GrenejekkD_8 GrenejekkD 9 VAR GrenejekkD_9 GrenejekkD 10 VAR GrenejekkD_10 GrenejekkD 11 VAR U_P_Dff Double Wor[Signe] 12 VAR U_P_Pff Double Wor[Signe] 13 VAR U_P_Pff_PD Double Wor[Signe] 14 VAR U_P_PDff Double Wor[Signe] 15 VAR U_R_1 Double Wor[Signe] 16 VAR U_R_2 Double Wor[Signe] 17 VAR Delta_V Double Wor[Signe] 18 VAR Delta_U_Pff Double Wor[Signe](0..1) 19 VAR U_PI_Pff_PD Double Wor[Signe] 55
140 Label Data Name : Regulatorkonfig Local Label Setting Cla Label Name Data Type Contant Device Are Comment VAR P_HJ Bit Bruke til lagring av regulatorkonfigurajon ve kjøring av manuell VAR PI_HJ Bit Bruke til lagring av regulatorkonfigurajon ve kjøring av manuell VAR Pff_HJ Bit Bruke til lagring av regulatorkonfigurajon ve kjøring av manuell VAR Dff_HJ Bit Bruke til lagring av regulatorkonfigurajon ve kjøring av manuell VAR PDff_HJ Bit Bruke til lagring av regulatorkonfigurajon ve kjøring av manuell 56
141 Label Data Name : Reverert_og_irekte-reg Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR HJ1 Double Wor[Signe] 2 VAR HJ2 Double Wor[Signe](0..1) 57
142 Label Data Name : Skiftregitere Local Label Setting Cla Label Name Data Type Contant Device Are Comment 58
143 Label Data Name : Wor_to_Double Local Label Setting Cla Label Name Data Type Contant Device Are Comment 59
144 Label Data Name : Enhetkonvertering Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Input Wor[Signe] 2 VAR HJ1 Double Wor[Signe] 3 VAR HJ2 Double Wor[Signe](0..1) 4 VAR HJ3 Double Wor[Signe](0..1) 5 VAR HJ4 Double Wor[Signe](0..1) 6 VAR HJ5 Double Wor[Signe](0..1) 7 VAR HJ6 Double Wor[Signe] 8 VAR_OUTPUT Output Wor[Signe] 60
145 Label Data Name : GrenejekkD Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Input Double Wor[Signe] Veri om kal jekke 2 VAR_OUTPUT Output Double Wor[Signe] Derom høy eller lav -----> 0 eller
146
147 Structure Laer/FBD Data Name : Areering_Slaver 1 Sett lave 2 are e Setter areen til lave 2. Dette må gjøre når programmet tarte opp. M8002 er 1 i førte can. M8002 Areen til laven Moulnr. Bufferminne Antall 16 bit n1 n2 n3 TO 1
148 Structure Laer/FBD Data Name : Alarmtiltan 1 Proeveri[1] LD< KritikLav Sjekker om proeverien er uner 10% Proeveri[1] LD> KritikHøy Sjekker om proeverien er over 90% LD< e[1] OR e[1] LD> HøytAvvik Sjekker om avviket er over 25% 2 KritikLav KritikHøy OR TC1 50 OUT_T TCoil TValue Sjekker om tiltanene holer eg i mer enn 5 ekuner. Timeren går høy erom ette er tilfelle. 3 HøytAvvik TC2 50 OUT_T TCoil TValue Sjekker om tiltanen holer eg i mer enn 5 ekuner. Timeren går høy erom ette er tilfelle. 4 KritikHøy TS1 HøyAlarm KritikLav TS1 LavAlarm HøytAvvik TS2 AvvikAlarm Setter alarmer avhengig av tiltan, erom ie har ligget inne i mer enn 5 ekuner 2
149 Structure Laer/FBD Data Name : AnalogTilDigital 1 Nivå i tank Leer analoge innganger 4-20mA hver gang variabelen ample går høy, og legger ata i proeveri. Detter er en amplingtien vi har att for vår regulator. Gir en pul og aktiverer omformingen hver amplingpunkt Sample 0 Kommano for kanal 0 0 Moulnr. AD/DA 17 Bufferminne på omformer 1 Antall 16 bit Kommano for å velge kanal 0 n1 n2 n3 TO Kommano for tart AD Moulnr. AD/DA Bufferminne på omformer Antall 16 bit Kommano for tart av AD omforming n1 n2 n3 TO Moulnr. AD/DA Bufferminne på omformer Antall 16 bit Sener omformet ignal til oppgitt ataregiter FROM n1 n2 n3 Sener omformet ignal til oppgitt ataregiter n1 n2 n3 FROM Proeveri[1] Dataregiter 3
150 Structure Laer/FBD Data Name : AntiWinup 1 P-reg D-forover 2 P-reg PD-forover 3 PI-reg D-forover Denne programblokken fungerer om anti winup før Denne programblokken fungerer om anti winup før Sjekker om pårag fra Aktiv erom P-reg me D-forover Setter nere grene or P-reg lik 0 erom et er valgt D-forover LD< PI P_FF D_FF MOV u_p[1] 1 0 u_p[1] 0 2 Sjekker om pårag fra Aktiv erom P-reg me D-forover Setter pårag fra P-reg lik 255 erom et er valgt D-forover LD> PI P_FF D_FF MOV u_p[1] u_p[1] Sjekker om pårag upp<0 Aktiv erom et er P-reg me PI P_FF D_FF u_p[1] upff[1] Aerer pårag fra P-reg og ADD Aktiv erom et er P-reg me Legger ummen av påragene til variabelen upp erom vi har valgt MOV upp Setter nere grene for upp lik 0 erom et er valgt P-reg LD< PI P_FF D_FF MOV upp 1 0 upp 0 2 Sjekker om pårag fra Aktiv erom et er P-reg me Setter øvre grene for upp lik 255 erom et er valgt P-reg me LD> PI P_FF D_FF MOV upp upp Sjekker om pårag u_pi<0 Aktiv erom et er PI-reg me D-forover Setter nere grene for u_pi lik 0 erom et er valgt D-forover LD< PI P_FF D_FF MOV u_pi[1] 1 0 u_pi[1] 0 2 Sjekker om pårag u_pi>255 Aktiv erom et er PI-reg me D-forover Setter øvre grene for u_pi lik 255 erom et er valgt D-forover LD> PI P_FF D_FF MOV u_pi[1] u_pi[1] 4
151 Structure Laer/FBD Data Name : AntiWinup 4 PI-reg PD-forove r Aktiv erom et er PI-reg me PI D_FF P_FF Sjekker om pårag upip<0 u_pi[1] upff[1] Aerer pårag fra PI-reg og ADD Aktiv erom et er PI-reg me PD-forover Legger ummen av påragene til variabelen upip erom vi har valgt MOV Setter nere grene for upp lik 0 erom et er valgt PI-reg LD< PI P_FF D_FF MOV upip 1 0 upip 0 2 Sjekker om pårag u_pi>255 Aktiv erom et er PI-reg me PD-forover Setter øvre grene for upip lik 255 erom et er valgt PI-reg LD> PI P_FF D_FF MOV upip upip upip 5
152 Structure Laer/FBD Data Name : autotune1 1 Setter variabelen for at autotuning kal aktivere. Når enne er aktiv kal en kjøre ferig før en avlutte. Verien til M50 M50 AutotuningAktiv S AutotuningFerig R 2 3 Egenlag funkjonblokk for autotuning. Setter inn parameterne vi kal bruke, og ener ut parameterne vi autotune_1 autotune Autotuningen forlag til Kp AutotuningAktiv Aktiv KpForlag ForlagKp Autotuningen forlag til Ti e[1] Avvik TiForlag ForlagTi Påraget fra autotuningen u[0] ForrigePårag Pårag u[1] Hvor mange proent ferig proeveri[1] Nivå Framgang FramgangAutotuning proeveri[0] ForrigeNivå Ferig Sener et ignal når SET autotuningen AutotuningFerig Skrur av autotuningen når en er ferig me målinger og utregninger, eller avbryte av bruker AutotuningFerig AutotuningAktiv R M51 6
153 Structure Laer/FBD Data Name : Avvik 1 Regner ut et aktuelle avviket mellom refeane og proeveri erom reverert mou er valgt. Dette bruke viere til reguleringen uavhengig av regulatortype. Rever Referane Proeveri[1] SUB_E _IN1 _IN2 e[1] Aktuelt avvik 2 Regner ut et aktuelle avviket mellom refeane og proeveri erom irekte mou er valgt. Dette bruke viere til reguleringen uavhengig av regulatortype. Rever Proeveri[1] Referane SUB_E _IN1 _IN2 e[1] Aktuelt avvik 7
154 Structure Laer/FBD Data Name : D-forover 1 Aktiv når foroverkoblingen kun kjører om P_FF Derom P-el er koblet ut kap KpFF ette til 1. Etterom vi har multipliert me 10 for å få me flere eimaler må KpFF her ette til 10 erom foroverkoblingen kun kal MOV 10 KpFF 2 KpFF TFF filterti Samplingti Fortyrrele[1] Fortyrrele[0] udff[0] D_reg1 D-regFF Forterkning Derivajonti filterkontant Sampling Aktuell_fortyrrele Forrige_fortyrrele forrige_pårag Pårag udff[1] Egenlag regulatorblokk. Gjør utregninger for pårag i en D-regulator me e parametrene om er att. 8
155 Structure Laer/FBD Data Name : DataFraMater 1 Minneceller Henter verien på 15 minneceller fra bufferminne 0 på FROM M n1 K4M n2 n3 2 RegulatorNivå Henter ata til nivåregulering fra e forkjellige bufferminnene på profibu om ene fra mater. Dette kjer å lenge programmet M8000 FROM FROM FROM FROM >>00 1 n1 Kp 1 n1 Ti 1 n1 Samplingti 1 n1 Referane_proent 1 n2 2 n2 3 n2 4 n2 1 n3 1 n3 1 n3 1 n3 >>00 FROM FROM Referane_proent 1 n1 Nominell 1 n1 Um_proent 5 n2 6 n2 1 n3 1 n3 3 Foroverkobling Henter ata til regulering av fortyrrelen fra mater M n1 n2 n3 FROM KpFF n1 n2 n3 FROM TFF n1 n2 n3 FROM Flow[1] n1 n2 n3 FROM FROM filterti 9
156 Structure Laer/FBD Data Name : DigitalTilAnalog 1 Pårag nivå Omformer igital ata til analog utgang Setter ignal om kal omforme.her er Kommano for valg av kanal 0 Allti aktiv M8000 Digitalignal til omforming u[1] Moulnr. AD/DA 0 Bufferminne på omformer 16 Antall 16 bit 1 n1 n2 n3 TO Velger kanal på omformer 0 Moulnr. AD/DA omformer Bufferminne omformer Antall 16 bit n1 n2 n3 TO >>00 Start DA omforming Moulnr. AD/DA omformer Bufferminne omformer Antall 16 bit Kommano for å tarte DA omforming >>00 Start DA omforming Moulnr. AD/DA omformer Bufferminne omformer n1 n2 n3 TO 10
157 Structure Laer/FBD Data Name : Fortyrrele 1 Aktuell uttrømning Forrige uttrømning Flow[1] Flow[0] Regner ut fortyrrelen. Enringen i uttrømningen SUB Fortyrrele[1] Fortyrrele, V 11
158 Structure Laer/FBD Data Name : Grener 1 Nere grene Setter nere grene for pårag til 0. Dette kal kje hele tien Allti aktiv M8000 LD< MOV u[1] 1 0 u[1] Øvre grene Setter øve grene for pårag til 255. Dette kal kje hele tien Allti aktiv M8000 LD> MOV u[1] u[1] 12
159 Structure Laer/FBD Data Name : Manuell 1 AutotuningAktiv M50 MAN R 2 Avvik=0 Aktiv når manuell MAN Proeveri[1] Setter refeanen lik proeverien. Dette ikrer at avviket blir 0. Dette ikrer rykkfri overgang tilbake til auto. MOV Referane 3 PI_til_MAN Sikrer rykkfri overgang fra PI-regulator til manuell regulator Manuell mou valgt MAN Aktiv erom PI Aktiv erom regulatoren er att om PI, og manuell mou er av Setter et manuelle påraget lik forrige pårag for PI for å ikre rykkfri overgang AND AutotuningAktiv MOV PI u[0] Um Forige pårag fra Manuelt pårag 4 P_til_MAN Manuell mou valgt MAN PI Aktiv erom PI ikke var valgt, altå Aktiv erom regulatoren er att om P og manuell mou er av AND AutotuningAktiv u[1] Setter et manuelle påraget lik et aktuelle påraget for P for å ikre rykkfri Aktuelt pårag fra P MOV Um Manuelt pårag 5 Setter nere grene for manuelt pårag til 0. Dette kal kje hele tien Allti aktiv M8000 LD< MOV Um 1 0 Um Setter øve grene for manuelt pårag til 255. Dette kal kje hele tien Allti aktiv M8000 LD> MOV Um Um 13
160 Structure Laer/FBD Data Name : NominellPårag 1 EnringerPI Aktiv når PI er Forrige pårag for Setter et nominelle påraget lik forrige pårag for PI. Sikrer rykkfri overgang fra PI til P PI u[0] MOV Nominell Nominelt 2 EnringerMAN Sikrer rykkfri overgang fra manuell til automatik mou Aktiv når MAN er Manuelt pårag MAN Um MOV Nominell Nominelt 3 EnringerPff Aktiv når foroverkobling me P-el er valgt Setter et nominelle påraget lik 0 nårp-elen i foroverkoblingen er aktiv MOV P_FF 0 Nominell Nominelt 14
161 Structure Laer/FBD Data Name : Omregning 1 Gjør om Ingeniørverier til oppløte verier MUL Referane_proent DIV Referane Mottar proentverier fra HMI og konverterer e til 8bit oppløning MUL Um_proent DIV Um rier fra HMI og konverterer e til 15
162 Structure Laer/FBD Data Name : OppaterVerier 1 Oppaterer verier fra Gir en pul hvert Oppaterer forrige veri av et totale Oppaterer forrige veri av avvik. Oppaterer forrige veri av fortyrrele MOV MOV MOV Sample u[1] u[0]e[1] e[0] Flow[1] Flow[0] Fortyrrele[1] Aktuelt pårag Forrige pårag Aktuelt avvik Forrige avvik Aktuell Uttrømning Forrige Uttrømning Aktuell fortyrrele >>00 >>00 MOV Fortyrrele[0] Proeveri[1] Forrige fortyrrele Aktuell proever MOV Proeveri[0] Forrige proever 2 Oppaterer verier fra e forkjellige Gir en pul hvert Oppaterer forrige veri av pårag fra Oppaterer forrige veri av pårag fra Oppaterer forrige veri av pårag fra P-reg fra foroverkobling MOV MOV MOV Sample u_p[1] u_p[0] u_pi[1] u_pi[0]upff[1] upff[0] udff[1] Aktuelt P-reg pårag Forrige P-reg pårag Aktuelt PI-reg pårag Forrige PI-reg pårag Aktuelt P-reg pårag fra Forrige P-reg pårag fra Aktuelt D-reg pårag fra Oppaterer forrige veri av pårag fra D-reg fra foroverkobling MOV Oppaterer forrige veri av pårag fra D-reg fra foroverkobling MOV Oppaterer forrige veri av pårag fra MOV udff[0] u_d[1] u_d[0] Forrige D-reg pårag fra Aktuelt D-reg Forrige D-reg 16
163 Structure Laer/FBD Data Name : Output 1 Her ene verier til MaterPLS. Båe kommunikajon me Mater PLS og Tankrigg. 2 Enhetkonvertering Proeveri[1] Input Enhetkonvertering_1 Enhetkonvertering Output Nivå_proent Gjør om verier til verier me avvik på +-0,5% u[1] Input Enhetkonvertering_2 Enhetkonvertering Output Ventilpårag_proent Referane Um Input Input Enhetkonvertering_3 Enhetkonvertering Output Enhetkonvertering_4 Enhetkonvertering Output ref_proent Um_proent 55 verier til verier me 17
164 Structure Laer/FBD Data Name : Output 3 Tilbakemeling til HMI på regulatorkonfigurajon MAN PI Tilbakemeling[0] MAN PI Tilbakemeling[1] PI-regulator P-regulator MAN Tilbakemeling[2] Manuell mou MAN Rever Tilbakemeling[3] MAN Rever Tilbakemeling[4] MAN P_FF D_FF Tilbakemeling[5] MAN P_FF D_FF Tilbakemeling[6] MAN D_FF P_FF Tilbakemeling[7] P_FF MAN Tilbakemeling[8] D_FF Direktemou Reverert mou P-reg i D-reg i PD-reg i Foroverkobling MAN AutotuningFerig Tilbakemeling[9] Tilbakemeling[10] Automatik mou AutotuningAktiv Tilbakemeling[11] Tilbakemeling[0] 16 BITARR_TO_INT BitArr n* Tilbakemeling_W Konverterer til wor for ening på bu 4 Sener verier til bufferminnet på profibukortet TO TO TO Nivå_proent n1 n2 n3 Um_proent n1 n2 n3 Ventilpårag_proent n1 n2 n3 ref_proent n1 n2 n3 TO Pinintrukjon TO-blokk: :Areen (variabelen) om a n1:moulpla ("lot") n2:bufferminnenr. ("BFM") n3:antall 16-bit or om kal ov TO TO TO TO >>00 Tilbakemeling_W e[1] ForlagKp ForlagTi FramgangAutotuning 1 n1 1 n1 1 n1 1 n1 6 n2 8 n2 9 n2 10 n2 1 n3 1 n3 1 n3 1 n3 18
165 Structure Laer/FBD Data Name : Output Pinintrukjon TO-blokk: :Areen (variabelen) om ata hente fra n1:moulpla ("lot") n2:bufferminnenr. ("BFM") n3:antall 16-bit or om kal overføre >>00 FramgangAutotuning n1 n2 n3 TO 19
166 Structure Laer/FBD Data Name : P-forover 1 KpFF Fortyrrele[1] Egenlag regulatorblokk for regulering av fortyrrele Preg_forover_1 P-reg_forover Forterkning Pårag Vk upff[1] 20
167 Structure Laer/FBD Data Name : P-regulator 1 Kp e[1] Nominell Egenlag funkjonblokk for utregning av pårag i P-regulator. Bruker e Forterkning Avvik u0 P_reg1 P-reg Pårag u_p[1] 21
168 Structure Laer/FBD Data Name : PI-regulator 1 Sikrer en rykkfri overgang fra P til PI. 2 PI Samplingti Ti Kp e[1] e[0] u[0] Gir en pul ve enring til PI PLS u_p[1] Forrige pårag ette lik et aktuell påraget for P-reg MOV Egenlag regulatorblokk for PI-regulering. Sener inn variablene, og henter ut et aktuelle påraget. PI_reg1 PI-reg T Integrajonti Forterkning Avvik ForrigeAvvik ForrigePaarag Pårag u[0] u_pi[1] 22
169 Structure Laer/FBD Data Name : Pårag_D-reg 1 Legger til påraget fra D-regulatoren til påraget fra e anre u[1] u_d[1] ADD M8000 MOV u[1] 23
170 Structure Laer/FBD Data Name : PåragManuell 1 Setter påraget lik et manuelle Aktiv når manuell mou er valgt Manuelt pårag MAN Um MOV u[1] Aktuelt 24
171 Structure Laer/FBD Data Name : PåragRegulator 1 P-reg Aktiv erom P-reg er valgt Aktiv erom ingen PI P_FF D_FF u_p[1] Legger påraget fra P-reg om MOV u[1] Aktiv erom P-foroverkobling P_FF u_p[1] upff[1] D_FF ADD Aerer pårag fra P-reg og P-forover Aktiv erom D-foroverkobling D_FF u_p[1] udff[1] Aktiv erom P_FF P_FF ADD Aerer pårag fra P-reg og D-forover upp upff[1] D_FF ADD Aerer ummen av påragene fra P-reg og P-forover etter aniwinup, Setter pårag u[1] lik ummen av pårag fra P-reg og MOV u[1] Setter pårag u[1] lik ummen av pårag fra P-reg og MOV u[1] Setter pårag u[1] lik ummen av pårag fra P-reg og MOV u[1] 25
172 Structure Laer/FBD Data Name : PåragRegulator 2 PI-reg Aktiv erom P-reg er valgt Aktiv erom ingen PI P_FF D_FF u_pi[1] Legger påraget fra PI-reg om MOV u[1] Aktiv erom P-foroverkobling P_FF u_pi[1] upff[1] D_FF ADD Aerer pårag fra PI-reg og P-forover Setter pårag u[1] lik ummen av pårag fra PI-reg og MOV u[1] Aktiv erom D-foroverkobling D_FF P_FF u_pi[1] udff[1] Aktiv erom upip udff[1] P_FF ADD Aerer pårag fra PI-reg og D-forover D_FF ADD Aerer ummen av påragene fra PI-reg og P-forover etter aniwinup, Setter pårag u[1] lik ummen av pårag fra P-reg og MOV u[1] Setter pårag u[1] lik ummen av pårag fra PI-reg og MOV u[1] 26
173 Structure Laer/FBD Data Name : Samplingteg 1 Nere grene Setter en nere grene for amplingti til 1 = 0.1 ekun. Dette kjer å lenge programmet kjører LD< MOV M8000 Samplingti 1 1 Samplingti Timer TS0 Gir en poitiv pul ve hver amplingti TC0 Samplingti OUT_T TCoil TValue 3 Aktiver ampling Den globale variabelen for å ample går høy ve hvert amplingteg TS0 Sample 27
174 FB/FUN Program Data Name : autotune Function Block 1 Opptart Gir en pul hver gang autotuning aktivere Nulltiller antall perioer hver gang autotuning aktivere Aktiv PLS RST Perioer 2 Ny perioe Sjekker om avviket blir 0. Dette markerer tarten på en ny Teller opp antall perioer om har gått hver gang yemet kommer over i LD< Aktiv PLS PLS M8000 INC Avvik 1 NyPerioe 0 2 Markerer ny halvperioe Perioer 3 OppaterTi "Forrige"-veriene benytte ikke i koen her. Dette er fori programmet får problemer erom målingene er for unøyaktige, og vi vil alri finne tåene vingninger. Vi regner uanett ut "forrige"-veriene i tilfelle vi kulle ønke å lee Oppaterer forrige Oppaterer nåværene Oppaterer forrige bunn nivå MOV MOV MOV NyPerioe >>00 Perioeti[1] Perioeti[0] Ti Perioeti[1] Bunn_Nivå[1] Bunn_Nivå[0] Aktuell Forrige Teller perioetie Aktuell perioeti Aktuelt bunn nivå Forrige bunn nivå Oppaterer forrige topp nivå >>00 Bunn_Nivå[0] Topp_Nivå[1] Forrige bunn nivå Aktuelt topp nivå MOV Topp_Nivå[0] Forrige topp nivå 4 ReetVerier NyPerioe Reeter timeren om teller Reeter teller 1 Reeter teller 2 RST RST RST Ti CC1 CC2 28
175 FB/FUN Program Data Name : autotune Function Block 5 Over referanen Sjekker om nivået er over referanen Die er aktiv å lenge programmet kjører og ikke er klar til å tarte Setter påraget til 0 erom avviket er minre enn 0, altå at nivået ligger over referanen LD< Aktiv StartRegning MOV M8000 Avvik 1 0 Pårag 0 2 Sjekker om nivået er ynkene Gir en poitiv pul hvert 0.1 ekun M8012 PLS Teller hvert 0.1 ekun, noe om vil gi INC AND CS1 MOV M8000 LD< ForrigeNivå Topp_Nivå[1]CC1 Nivå 1 1 Legger forrige nivå om ForrigeNivå 2 toppnivå erom nivået er ynkene Ti Denne telleren teller opp når forrige nivå bli lagt om toppnivå, lik at enne ikke blir overkrevet før nete OUT_C CCoil CValue 6 Uner referane n Sjekker om nivået er uner referanen Die er aktiv å lenge programmet kjører og ikke er klar til å tarte Setter påraget til mak erom avviket er tørre enn 0, altå at nivået ligger uner referanen LD> Aktiv StartRegning MOV M8000 Avvik Pårag 0 2 Gir en poitiv pul hvert 0.1 ekun M8012 PLS Teller hvert 0.1 ekun, noe om vil gi INC AND CS2 MOV M8000 LD> ForrigeNivå Bunn_Nivå[1]CC2 Nivå 1 1 Legger forrige Nivå om ForrigeNivå 2 toppnivå erom nivået Sjekker om nivået er ynkene er tigene Ti Denne telleren teller opp når forrige nivå bli lagt om toppnivå, lik at enne ikke blir overkrevet før nete OUT_C CCoil CValue Denne telleren teller opp når forrige nivå bli lagt om toppnivå, lik at enne ikke blir overkrevet før nete OUT_C CCoil CValue 29
176 FB/FUN Program Data Name : autotune Function Block 7 SammenlignPeri oe Sjekker om et har gått 7 perioer. Dette er antall perioer vi regner me et går før vi har tåene vingninger. Etterom vi måler verien i bit blir et for unøyaktig å ammenligne verier, og vi riikerer M8000 Antall perioer Perioer Ønket_antall_perioer Satt antall perioer vi ønker. Vi har att 1 2 LD= Aktiv StartRegning Går høy erom et har gått 7 perioer og autotuning er 8 Regner ut framgangen til autotuningen. Hvor mange proent ferig en er. MUL_E Aktiv Perioer _IN 100 _IN Ønket_antall_perioer DIV_E _IN1 _IN2 Framgang 9 16-bit til 32-bit Flytter 16-bit ataor til 32-bit Bunn_Nivå[1] _INT INT_TO_DINT Bunn32 Topp_Nivå[1] _INT INT_TO_DINT Topp32 Legger 16-bit variabelen perioeti i 32-bit variabelen Tk. Dette parer o for et teg. Perioeti[1] _INT INT_TO_DINT Tk 10 Regn Kp Regner ut topp-til-bunn for Kontanten er topp-til-bunn for pårag, altå 255 multipliert me Regneoperajon for å regne ut et forlag til Kp. 0.65*Kk. Her bruke 65 for å få me StartRegning DSUB DDIV DMUL >>00 Topp32 1 Kontant 1 Kk Kk[0] 1 Kp_1000 Kp_1000[0] Bunn Kk = 1.27*(topp-til-bunn for pårag)/(topp-til-bunn for proeveri) Kutter ne antall uønkee eimaler om ble lagt me i mellomregningen. Dette >>00 Kp_1000[0] DDIV Kp32 30
177 FB/FUN Program Data Name : autotune Function Block 11 Regn Ti Multiplierer Tk me 50. Ti=Tk* benytte her for å få me flere eimaler. Divierer me 100 for å forkorte varet til riktig antall eimaler. Svaret blir 10*Ti, om er et DMUL DDIV StartRegning Tk 1 Ti_100 Ti_100[0] 1 Ti bit til 16-bit Flytter 32-bi ataor til 16-bit ataor Ti32[0] Kp32[0] _DINT DINT_TO_INT _DINT DINT_TO_INT TiForlag KpForlag 13 Ferig Sener ut ignal når programmet er ferig me StartRegning Ferig 31
178 FB/FUN Program Data Name : D-regFF Function Block 1 Flytter alle input-ataene til oble ataor. 16-bit or til Derivajonti _INT INT_TO_DINT Derivajonti32 filterkontant Sampling Aktuell_fortyrrele Forrige_fortyrrele forrige_pårag Forterkning _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT filterkontant32 Sampling32 Aktuell_fortyrrele32 Forrige_fortyrrele32 forrigepårag32 Forterkning32 2 Hinrer at filterkontanten blir att 3 4 LD= DMOV M8000 filterkontant 1 1 filterkontant M8000 Derivajonti32 filterkontant32 Divierer erivajontien på 1 2 DDIV Regner ut enringen i TfFF Multiplierer Kp me enring i fortyrrele, DSUB DMUL M8000 V[1] Aktuell_fortyrrele TKpDeltaV KpDeltaV[0] Forrige_fortyrrele32 2 Forterkning32 2 Derivajonti32 V[0] Multiplierer erivajontien me enring i 1 2 DMUL erivajontien me Dette gjøre fori båe T og Kp er multipliert me 10 DMUL StorTKpDeltaV StorTKpDeltaV[0] DDIV TKpDeltaV 5 Aerer prouktet av filterti Multiplierer og forrige pårag, me erivatoren filterti prouktet av erivajonti me forrige pårag. og enring i fortyrele. Divierer ummen av T*DeltaV+Tf*u[0] på ummen av h+tf DMUL DADD DDIV M8000 TfFF[0] 1 TfU_1 TKpDeltaV[0] 1 1 Pårag32 forrigepårag32 2 TfU_1[0] 2 2 Påraget blir (Tf*u[0] + T*(V[1] - V[0])) / (h+tf) DADD M8000 Sampling32 TfFF[0] 1 2 Aerer amplingti me iltertien. h+tf 32
179 FB/FUN Program Data Name : D-regFF Function Block Påraget blir (Tf*u[0] + T*(V[1] - V[0])) / (h+tf) 6 Flytter påragverien fra et 32-bit or til et 16-bit or Pårag32[0] _DINT DINT_TO_INT Pårag 7 Setter nere grene for pårag til Dette kal kje hele tien Allti aktiv M8000 LD< MOV Pårag Pårag Setter øve grene for pårag til 255. Dette kal kje hele tien Allti aktiv M8000 LD> MOV Pårag Pårag 33
180 FB/FUN Program Data Name : Enhetkonvertering Function Block 1 FB konverterer fra til me maximalt avvik Input _INT INT_TO_DINT HJ1 HJ DMUL HJ2 HJ2[0] DDIV HJ3 Heltallreultat i HJ[0] + ret i HJ3[1] HJ3[1] 10 HJ4[0] DMUL DDIV HJ4 HJ5 LDD> DADD HJ5[0] 1 HJ3[0] 1 HJ3[0] Sjekker om eimaltallet er tørre enn 5 Derom en er tørre enn 5 legge et til 1 på heltallvaret på enne måten begrene avviket i en totale beregningen HJ3[0] _DINT DINT_TO_INT Output 34
181 FB/FUN Program Data Name : Enhetkonvertering Function Block ltat i HJ[0] + ret i HJ3[1] Sjekker om eimaltallet er tørre Derom en er tørre enn 5 legge et til 1 på heltallvaret på enne måten begrene avviket i en totale beregningen 35
182 FB/FUN Program Data Name : P-reg Function Block 1 Flytter alle input-ataene til oble ataor. 16-bit or til 32-bit or Forterkning _INT INT_TO_DINT Forterkning32 Avvik _INT INT_TO_DINT Avvik32 u0 _INT INT_TO_DINT u032 2 Multipierer avviket me forterkningen og legger et til ekp. e*kp Divierer ekp me 10 for å fjerne eimaler og legger ette til ekp2 ekp2=ekp/10 Aerer ekp2 me nominelt pårag ekp2+u032 Gjør påraget om fra 32-bit til 16-bit M8000 Avvik32 Forterkning DMUL ekp ekp[0] DDIV ekp2 ekp2[0] u DADD _DINT DINT_TO_INT Pårag 36
183 FB/FUN Program Data Name : P-reg_forover Function Block 1 Flytter alle input-ataene til oble ataor. 16-bit or til Forterkning _INT INT_TO_DINT Forterkning32 Vk _INT INT_TO_DINT Vk32 2 Multiplierer fortyrrele me forterkning Vk*Kp=VkKp Divierer DvKp me 10 for å fjerne eimaler DvKp/10=Pårag DMUL DDIV M8000 Vk32 Forterkning VkKp VkKp[0] Pårag32 Påraget er lik Kp*(V[1]-V[0]) 3 Pårag32[0] Gjør påraget om fra 32-bit til 16-bit _DINT DINT_TO_INT Pårag 37
184 FB/FUN Program Data Name : PI-reg Function Block 1 Forterkning Flytter alle input-ataorene til oble ataor. 16-bit til _INT INT_TO_DINT forterkning32 Integrajonti Avvik ForrigeAvvik T ForrigePaarag _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT _INT INT_TO_DINT integrajonti32 avvik32 forrigeavvik32 T32 forrigepaarag32 2 Divierer Ti på h, og legger reultatet til Tih. Dette er en enring av regulatoralgoritmen om kulle vært h/ti, men etterom Ti>h ville ette gitt 0 når vi regner me heltall. integrajonti32 T DDIV Tih 3 Multiplierer avvik og forterkning e*kp og legger prouktet forterkning32 avvik DMUL ekp Multiplierer Tih me 10, og legger reultatet i UtvietTih. Dette gjøre får å få me flere DMUL 10 1 UtvietTih Tih[0] 2 4 Hopper over følgene koe når CS0 går høy. Denne går høy etter programmet har kjørt en gang, fori. Dette gjøre for at heltallivijonen ikke kal bli 0 før et tajonære avviket er 0 CS0 Hopp2 p CJ 5 ekp[0] UtvietTih[0] Divierer ekp på UtvietTih, ekp/(10*tih) og legger reultatet i 1 2 DDIV Uik 38
185 FB/FUN Program Data Name : PI-reg Function Block 6 ekp[0] UtvietTih[0] Gjør operajonen moulo mellom ekp og UtvietTih. Denne operajonen henter reten fra heltallivijonen i MOD _IN1 _IN2 RetUik 7 Hopp2: Markerer lutten på hoppet, koen om hoppe over kal kun kjøre en gang. M8000 CC0 1 Teller opp å lenge programmet kjører. Telleren går høy etter å ha telt opp til OUT_C CCoil CValue 8 M8000 RetUik Flytter et oble ataoret fra RetUik til ForrigeRet. DMOV ForrigeRet 9 Aerer forrige ret Divierer ummen av forrige ret og ekp på UtvietTih ForrigeRet ekp[0] 1 2 DADD UtvietTih[0] 1 2 DDIV Uik 10 Kjører moulooperajonen ForrigeRet ekp[0] Aerer forrige ret 1 2 DADD UtvietTih[0] på ummen av forrige ret og ekp me UtvietTih. Denne legger reten av MOD _IN1 _IN2 RetUik 11 Divierer KpDe på 10. Subtraherer avvik på forrige avvik. Dette gir enringen i Multiplierer enringen i avvik me forterkningen Kp*(e[1]-e[0]) og legger reultatet i Dette er fori vi multipliere me 10 tiligere, og vi ønker nå å fjerne en eimal. Svaret legge nå til MinreKpDe DSUB DMUL DDIV >>00 avvik KpDe KpDe[0] 1 MinreKpDe MinreKpDe[0] forrigeavvik32 2 forterkning Aerer Uik me forrige pårag og legger reultatet i Uik[0] forrigepaarag DADD UikU0 39
186 FB/FUN Program Data Name : PI-reg Function Block Aerer reultatet av e tiligere utregningene og legger ette til et 32-bit ataoret >>00 MinreKpDe[0] UikU0 1 2 DADD Pårag32 Pårag= u[0] + Uik + (Kp*10*(e[1] - e[0])/10 12 Sjekker om Pårag32 er Setter Pårag32 lik 0 erom LDD< DMOV Pårag Pårag Sjekker om Pårag32 er over Setter Pårag32 lik 255 erom ammenligningen 13 LDD> DMOV Pårag Pårag Skriver et oble ataoret Pårag32 til et 16-bit ataoret Pårag om ene ut av regulatoren Pårag32 _DINT DINT_TO_INT Pårag 40
187 Label Data Name : Global1 Global Label Setting Cla Label Name Data Type Contant Device Are Comment Remark Relation with Sytem Label Sytem Label Name Attribute 1 VAR_GLOBAL u Wor[Signe](0..1) D230 %MW0.230 Pårag 2 VAR_GLOBAL e Wor[Signe](0..1) D240 %MW0.240 Avvik 3 VAR_GLOBAL Kp Wor[Signe] D202 %MW0.202 Forterkning 4 VAR_GLOBAL Ti Wor[Signe] D204 %MW0.204 Integralti 5 VAR_GLOBAL Referane_proent Wor[Signe] D206 %MW0.206 Referane 6 VAR_GLOBAL Proeveri Wor[Signe](0..1) D208 %MW0.208 Proeveri 7 VAR_GLOBAL Nominell Wor[Signe] D210 %MW0.210 Nominelt Pårag 8 VAR_GLOBAL Samplingti Wor[Signe] D212 %MW0.212 Samplingti 9 VAR_GLOBAL filterti Wor[Signe] D214 %MW0.214 filterti 10 VAR_GLOBAL Um_proent Wor[Signe] D216 %MW0.216 Manuelt pårag 11 VAR_GLOBAL T Wor[Signe] D218 %MW VAR_GLOBAL PI Bit M40 %MX0.40 1=PI 0=P 15 VAR_GLOBAL P_FF Bit M45 %MX0.45 1=foroverkobl. me P-reg 16 VAR_GLOBAL D_FF Bit M46 %MX0.46 1=foroverkobl. me D-reg 17 VAR_GLOBAL MAN Bit M42 %MX0.42 1=Manuell mou, 0=Automatik mou 18 VAR_GLOBAL Rever Bit M44 %MX VAR_GLOBAL KpFF Wor[Signe] D220 %MW0.220 Forterkning på fortyrrele 22 VAR_GLOBAL TFF Wor[Signe] D222 %MW0.222 Derivajonti VAR_GLOBAL Flow Wor[Signe](0..1) D224 %MW0.224 Uttrømning 26 VAR_GLOBAL Fortyrrele Wor[Signe](0..1) D226 %MW0.226 Fortyrrele, V 27 VAR_GLOBAL Sample Bit M16 %MX0.16 Sample når enne er høy VAR_GLOBAL u_p Wor[Signe](0..1) D300 %MW0.300 Pårag P-reg 31 VAR_GLOBAL u_pi Wor[Signe](0..1) D302 %MW0.302 Pårag PI-reg 32 VAR_GLOBAL upff Wor[Signe](0..1) D304 %MW0.304 Pårag foroverkobling P-reg 33 VAR_GLOBAL udff Wor[Signe](0..1) D306 %MW0.306 Pårag foroverkobling D-reg 34 VAR_GLOBAL upp Wor[Signe] D308 %MW0.308 Sum pårag P-reg og P-el forover 35 VAR_GLOBAL upip Wor[Signe] D310 %MW0.310 Sum pårag PI-reg og P-el forover 36 VAR_GLOBAL u_d Wor[Signe](0..1) D312 %MW VAR_GLOBAL KritikHøy Bit M101 %MX0.101 Proeverien er kritik høy, over 90% 40 VAR_GLOBAL KritikLav Bit M102 %MX0.102 Proeverien er kritik lav, uner 10% 41 VAR_GLOBAL HøytAvvik Bit M103 %MX0.103 Avviket er for tort, 25% avvik 42 VAR_GLOBAL HøyAlarm Bit M60 %MX0.60 Aktiv når alarmen for høyt nivå går 43 VAR_GLOBAL LavAlarm Bit M61 %MX0.61 Aktiv når alarmen for lavt nivå går 44 VAR_GLOBAL AvvikAlarm Bit M62 %MX0.62 Aktiv når alarmen for tort avvik går VAR_GLOBAL Tilbakemeling Bit(0..15) M200 %MX VAR_GLOBAL Tilbakemeling_W Wor[Signe] D324 %MW VAR_GLOBAL Referane Wor[Signe] D326 %MW VAR_GLOBAL Um Wor[Signe] D328 %MW VAR_GLOBAL AutotuningAktiv Bit M120 %MX VAR_GLOBAL ForlagKp Wor[Signe] D250 %MW VAR_GLOBAL ForlagTi Wor[Signe] D251 %MW VAR_GLOBAL FramgangAutotuning Wor[Signe] D252 %MW VAR_GLOBAL AutotuningFerig Bit M121 %MX
188 Label Data Name : Areering_Slaver Local Label Setting Cla Label Name Data Type Contant Device Are Comment 42
189 Label Data Name : Alarmtiltan Local Label Setting Cla Label Name Data Type Contant Device Are Comment 43
190 Label Data Name : AnalogTilDigital Local Label Setting Cla Label Name Data Type Contant Device Are Comment 44
191 Label Data Name : AntiWinup Local Label Setting Cla Label Name Data Type Contant Device Are Comment 45
192 Label Data Name : autotune1 Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR autotune_1 autotune 46
193 Label Data Name : Avvik Local Label Setting Cla Label Name Data Type Contant Device Are Comment 47
194 Label Data Name : D-forover Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR D_reg1 D-regFF 48
195 Label Data Name : DataFraMater Local Label Setting Cla Label Name Data Type Contant Device Are Comment 49
196 Label Data Name : DigitalTilAnalog Local Label Setting Cla Label Name Data Type Contant Device Are Comment 50
197 Label Data Name : Fortyrrele Local Label Setting Cla Label Name Data Type Contant Device Are Comment 51
198 Label Data Name : Grener Local Label Setting Cla Label Name Data Type Contant Device Are Comment 52
199 Label Data Name : Manuell Local Label Setting Cla Label Name Data Type Contant Device Are Comment 53
200 Label Data Name : NominellPårag Local Label Setting Cla Label Name Data Type Contant Device Are Comment 54
201 Label Data Name : Omregning Local Label Setting Cla Label Name Data Type Contant Device Are Comment 55
202 Label Data Name : OppaterVerier Local Label Setting Cla Label Name Data Type Contant Device Are Comment 56
203 Label Data Name : Output Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR Nivå_proent Wor[Signe] Ingeniørenheter om kal ene til mater 2 VAR Ventilpårag_proent Wor[Signe] Ingeniørenheter om kal ene til mater 3 VAR ref_proent Wor[Signe] Ingeniørenheter om kal ene til mater 4 VAR Enhetkonvertering_1 Enhetkonvertering Bruk av funkjonblokk 5 VAR Enhetkonvertering_2 Enhetkonvertering Bruk av funkjonblokk 6 VAR Enhetkonvertering_3 Enhetkonvertering Bruk av funkjonblokk 7 VAR Enhetkonvertering_4 Enhetkonvertering Bruk av funkjonblokk 57
204 Label Data Name : P-forover Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR Preg_forover_1 P-reg_forover 58
205 Label Data Name : P-regulator Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR P_reg1 P-reg 59
206 Label Data Name : PI-regulator Local Label Setting Cla Label Name Data Type Contant Device Are Comment 1 VAR PI_reg1 PI-reg 60
207 Label Data Name : Pårag_D-reg Local Label Setting Cla Label Name Data Type Contant Device Are Comment 61
208 Label Data Name : PåragManuell Local Label Setting Cla Label Name Data Type Contant Device Are Comment 62
209 Label Data Name : PåragRegulator Local Label Setting Cla Label Name Data Type Contant Device Are Comment 63
210 Label Data Name : Samplingteg Local Label Setting Cla Label Name Data Type Contant Device Are Comment 64
211 Label Data Name : autotune Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Aktiv Bit 2 VAR_INPUT Avvik Wor[Signe] 3 VAR_INPUT ForrigePårag Wor[Signe] 4 VAR_INPUT Nivå Wor[Signe] 5 VAR_INPUT ForrigeNivå Wor[Signe] 6 VAR Ti Wor[Signe] 7 VAR Perioer Wor[Signe] 8 VAR Topp_Nivå Wor[Signe](0..1) 9 VAR Bunn_Nivå Wor[Signe](0..1) 10 VAR NyPerioe Bit 11 VAR StartRegning Bit 12 VAR_CONSTANT Kontant Double Wor[Signe] VAR Bunn32 Double Wor[Signe] 14 VAR Topp32 Double Wor[Signe] 15 VAR Kk Double Wor[Signe](0..1) 16 VAR Kp_1000 Double Wor[Signe](0..1) 17 VAR Kp32 Double Wor[Signe](0..1) 18 VAR Perioeti Wor[Signe](0..1) 19 VAR Tk Double Wor[Signe] 20 VAR Ti_100 Double Wor[Signe](0..1) 21 VAR T_100 Double Wor[Signe](0..1) 22 VAR T32 Double Wor[Signe](0..1) 23 VAR Ti32 Double Wor[Signe](0..1) 24 VAR_OUTPUT KpForlag Wor[Signe] 25 VAR_OUTPUT TiForlag Wor[Signe] 26 VAR_OUTPUT Pårag Wor[Signe] 27 VAR_OUTPUT Framgang Wor[Signe] 28 VAR_OUTPUT Ferig Bit 29 VAR_CONSTANT Ønket_antall_perioer Wor[Signe] 7 65
212 Label Data Name : D-regFF Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Forterkning Wor[Signe] 2 VAR_INPUT Derivajonti Wor[Signe] 3 VAR_INPUT filterkontant Wor[Signe] 4 VAR_INPUT Sampling Wor[Signe] 5 VAR_INPUT Aktuell_fortyrrele Wor[Signe] 6 VAR_INPUT Forrige_fortyrrele Wor[Signe] 7 VAR_INPUT forrige_pårag Wor[Signe] 8 VAR Forterkning32 Double Wor[Signe] 9 VAR Derivajonti32 Double Wor[Signe] 10 VAR filterkontant32 Double Wor[Signe] 11 VAR Sampling32 Double Wor[Signe] 12 VAR Aktuell_fortyrrele32 Double Wor[Signe] 13 VAR Forrige_fortyrrele32 Double Wor[Signe] 14 VAR forrigepårag32 Double Wor[Signe] 15 VAR Pårag32 Double Wor[Signe](0..1) 16 VAR TfFF Double Wor[Signe](0..1) 17 VAR KpDeltaV Double Wor[Signe](0..1) 18 VAR StorTKpDeltaV Double Wor[Signe](0..1) 19 VAR TKpDeltaV Double Wor[Signe](0..1) 20 VAR TfU_1 Double Wor[Signe](0..1) 21 VAR_OUTPUT Pårag Wor[Signe] 66
213 Label Data Name : Enhetkonvertering Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Input Wor[Signe] 2 VAR HJ1 Double Wor[Signe] 3 VAR HJ2 Double Wor[Signe](0..1) 4 VAR HJ3 Double Wor[Signe](0..1) 5 VAR HJ4 Double Wor[Signe](0..1) 6 VAR HJ5 Double Wor[Signe](0..1) 7 VAR HJ6 Double Wor[Signe] 8 VAR_OUTPUT Output Wor[Signe] 67
214 Label Data Name : P-reg Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Forterkning Wor[Signe] 2 VAR_INPUT Avvik Wor[Signe] 3 VAR_INPUT u0 Wor[Signe] 4 VAR Forterkning32 Double Wor[Signe] 5 VAR Avvik32 Double Wor[Signe] 6 VAR u032 Double Wor[Signe] 7 VAR ekp Double Wor[Signe](0..1) 8 VAR ekp2 Double Wor[Signe](0..1) 9 VAR_OUTPUT Pårag Wor[Signe] 68
215 Label Data Name : P-reg_forover Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT Forterkning Wor[Signe] 2 VAR_INPUT Vk Wor[Signe] 3 VAR Forterkning32 Double Wor[Signe] 4 VAR Vk32 Double Wor[Signe] 5 VAR VkKp Double Wor[Signe](0..1) 6 VAR Pårag32 Double Wor[Signe](0..1) 7 VAR_OUTPUT Pårag Wor[Signe] 69
216 Label Data Name : PI-reg Function/FB Label Setting Cla Label Name Data Type Contant Comment 1 VAR_INPUT T Wor[Signe] Samplingti 2 VAR_INPUT Integrajonti Wor[Signe] 3 VAR_INPUT Forterkning Wor[Signe] 4 VAR_INPUT Avvik Wor[Signe] 5 VAR_INPUT ForrigeAvvik Wor[Signe] 6 VAR_INPUT ForrigePaarag Wor[Signe] 7 VAR RetUik Double Wor[Signe] 8 VAR Tih Double Wor[Signe](0..1) 9 VAR ForrigeRet Double Wor[Signe] 10 VAR Uik Double Wor[Signe](0..1) 11 VAR T32 Double Wor[Signe] 12 VAR integrajonti32 Double Wor[Signe] 13 VAR forterkning32 Double Wor[Signe] 14 VAR avvik32 Double Wor[Signe] 15 VAR forrigeavvik32 Double Wor[Signe] 16 VAR forrigepaarag32 Double Wor[Signe] 17 VAR ekp Double Wor[Signe](0..1) 18 VAR UtvietTih Double Wor[Signe](0..1) 19 VAR KpDe Double Wor[Signe](0..1) 20 VAR MinreKpDe Double Wor[Signe](0..1) 21 VAR UikU0 Double Wor[Signe] 22 VAR Pårag32 Double Wor[Signe] 23 VAR tet1 Double Wor[Signe] 24 VAR tet2 Double Wor[Signe] 25 VAR_OUTPUT Pårag Wor[Signe] 70
217
218 Sjekklite for tet av totankprojektet, gruppe 5 og 6 Anleggel Dato Ok/ikke ok Sjekk av frekvenomformerinntilling på 40Hz Sjekk lufttrykk på kompreor, mak 7 bar Sjekk av nivå i vannreervoar på tankrigg Ethernetkommunikajon Profibukommunikajon Styring av magnetventiler fra InTouch/IX-panel Styring av pumpe fra InTouch/IX-panel Skrive fra InTouch på pc til materpls Skrive fra ix-panel på riggen til materpls Skrive fra webie til materpls Riktige verier tilbake fra rigg til InTouch på pc Riktige verier tilbake fra rigg til ix-panel Kalibrering av nivåmåler tank 1 Kalibrering av nivåmåler tank 2 Sjekk av flowmåler Filter på måleløyfer Alarm ve for tort avvik tank 1 Alarm ve kritik lavt nivå tank 1 Alarm ve kritik høyt nivå tank 1 Alarm ve for tort avvik tank 2 Alarm ve kritik lavt nivå tank 2 Alarm ve kritik høyt nivå tank 2 Riktig lyignal fra alarmlampe ve alarmer/feilkvittering Kvittering av alarmer fra InTouch på pc Kvittering av alarmer fra ix-panel
219 Tet av rykkfrie overganger regulator tank 1 Tet av rykkfrie overganger regulator tank 2 P-regulering tank 1, me prang i referanen PI-regulering tank 1, P-regulering tank 2, PI-regulering tank 2, P-regulering tank 1, me prang i utløp PI-regulering tank 1, P-regulering tank 2, PI-regulering tank 2, P-regulering tank 2 me P-foroverkobling, me prang i utløp PI-regulering tank 2 me P- foroverkobling, P-regulering tank 2 me D- foroverkobling, PI-regulering tank 2 me D-foroverkobling, P-regulering tank 2 me PD-foroverkobling, PI-regulering tank 2 me PD-foroverkobling, Korrekte kriverettigheter i InTouch for operatør 1 Korrekte kriverettigheter i InTouch for operatør 2 Korrekte kriverettigheter i InTouch for operatør 3 Korrekte kriverettigheter på ix-panel Tet av bonuprojekt, gruppe 5 (Webkamera) Tet av bonuprojekt, gruppe 6 (Autotuning)
220

221 Velegg OPC BEIJER SLAVE 1
222

223 Velegg - OPC BEIJER - Slave 2
Internett og pc Brukerveiledning
 FASETT JUNI 2008 Internett og pc Brukerveiledning Altibox er en fiberløning tilpaet morgendagen muligheter. I en og amme fiberkabel får du rake internettlinjer, et variert tv- og filmtilbud plu ikker og
FASETT JUNI 2008 Internett og pc Brukerveiledning Altibox er en fiberløning tilpaet morgendagen muligheter. I en og amme fiberkabel får du rake internettlinjer, et variert tv- og filmtilbud plu ikker og
Internett og pc Brukerveiledning
 FASETT JUNI 2008 Internett og pc Brukerveiledning Altibox er en fiberløning tilpaet morgendagen muligheter. I en og amme fiberkabel får du rake internettlinjer, et variert tv- og filmtilbud plu ikker og
FASETT JUNI 2008 Internett og pc Brukerveiledning Altibox er en fiberløning tilpaet morgendagen muligheter. I en og amme fiberkabel får du rake internettlinjer, et variert tv- og filmtilbud plu ikker og
Internett og PC Brukerveiledning
 Internett og PC Brukerveiledning IP-telefoni Brukerveiledning Støtter Window XP 1 Klar for internett fra Altibox? 2 Oppett av trådlø router og brannmur i hjemmeentralen 3 Oppkobling av pc til internett
Internett og PC Brukerveiledning IP-telefoni Brukerveiledning Støtter Window XP 1 Klar for internett fra Altibox? 2 Oppett av trådlø router og brannmur i hjemmeentralen 3 Oppkobling av pc til internett
for internett fra Altibox?
 1 Klar for internett fra Altibox? 1 Klar for internett fra Altibox? 2 Oppett 3 Oppkobling 4 Koble 5 Opprette 6 Sikkerhet av trådlø router og brannmur i hjemmeentralen av pc til internett med Window Vita
1 Klar for internett fra Altibox? 1 Klar for internett fra Altibox? 2 Oppett 3 Oppkobling 4 Koble 5 Opprette 6 Sikkerhet av trådlø router og brannmur i hjemmeentralen av pc til internett med Window Vita
Symbolisering av logisk form: setningslogiske tegn.
 Logike ltninger NB! Dette er for peielt intereerte: Siden det ikke tår å mye om dette i lærebøkene er omfanget av dette foreleningmanet alt for tort i forhold til hva vi kan betrakte om penm. Videre kan
Logike ltninger NB! Dette er for peielt intereerte: Siden det ikke tår å mye om dette i lærebøkene er omfanget av dette foreleningmanet alt for tort i forhold til hva vi kan betrakte om penm. Videre kan
Internett og pc Brukerveiledning
 Internett og pc Brukerveiledning 1 2 Oppett Klar for internett fra Altibox? av trådlø router og brannmur i hjemmeentralen 3 Oppkobling av pc til internett med Window Vita 4 Koble opp mot e-pot/oppett Window
Internett og pc Brukerveiledning 1 2 Oppett Klar for internett fra Altibox? av trådlø router og brannmur i hjemmeentralen 3 Oppkobling av pc til internett med Window Vita 4 Koble opp mot e-pot/oppett Window
IL 28.04.2015 Data Name : POU1909
 IL 8.04.05 Data Name : POU909 MELEC_TAT (*Exchange PLC ata with Profibu DP*) LD XB AND XD TO H00 K960 D00 K6 (* DP lave with FDL 0 *) TO H00 K976 D00 K6 (* DP lave with FDL 0 *) OUT Y00 AND X00 FOM H00
IL 8.04.05 Data Name : POU909 MELEC_TAT (*Exchange PLC ata with Profibu DP*) LD XB AND XD TO H00 K960 D00 K6 (* DP lave with FDL 0 *) TO H00 K976 D00 K6 (* DP lave with FDL 0 *) OUT Y00 AND X00 FOM H00
Internett og pc Brukerveiledning
 FASETT JANUAR 2008 Internett og pc Brukerveiledning Altibox fra Lye er en fiberoptik løning tilpaet morgendagen muligheter. I en og amme fiberoptike kabel får du rake internettlinjer, et variert tv- og
FASETT JANUAR 2008 Internett og pc Brukerveiledning Altibox fra Lye er en fiberoptik løning tilpaet morgendagen muligheter. I en og amme fiberoptike kabel får du rake internettlinjer, et variert tv- og
Internett og pc Brukerveiledning
 FASETT JUNI 2009 Internett og pc Brukerveiledning Altibox fra XXX er en fiberløning tilpaet morgendagen muligheter. I en og amme fiberkabel får du rake internettlinjer, et variert tv- og filmtilbud plu
FASETT JUNI 2009 Internett og pc Brukerveiledning Altibox fra XXX er en fiberløning tilpaet morgendagen muligheter. I en og amme fiberkabel får du rake internettlinjer, et variert tv- og filmtilbud plu
Totankprosjektrapport
 Høgskolen i Sør-Trøndelag Totankprosjektrapport Prosjektoppgave i Styresystemer 2AEL13H våren 2015 Gruppe 5 & 6 Emil Hatletveit Kristian Strøm Terje Magnus Sørensen Stian Berg Dyrnes Snorre Vongraven Andreas
Høgskolen i Sør-Trøndelag Totankprosjektrapport Prosjektoppgave i Styresystemer 2AEL13H våren 2015 Gruppe 5 & 6 Emil Hatletveit Kristian Strøm Terje Magnus Sørensen Stian Berg Dyrnes Snorre Vongraven Andreas
BEDRIFTSØKONOMISK ANALYSE MAN 8898 / 8998
 BEDRIFTSØKONOMISK ANALYSE MAN 8898 / 8998 Lineær programmering og bedriftøkonomike problemer Tor Tangene BI - Sandvika V-00 Dipoijon Bruk av LP i økonomike problemer Et LP-problem Begreper og noen grunnleggende
BEDRIFTSØKONOMISK ANALYSE MAN 8898 / 8998 Lineær programmering og bedriftøkonomike problemer Tor Tangene BI - Sandvika V-00 Dipoijon Bruk av LP i økonomike problemer Et LP-problem Begreper og noen grunnleggende
MYNDIGGJORTE MEDARBEIDERE - gir bedre pleie- og omsorgstjenester
 MYNDIGGJORTE MEDARBEIDERE - gir bedre pleie- og omorgtjeneter Februar 2005 FoU MYNDIGGJORTE MEDARBEIDERE - gir bedre pleie- og omorgtjeneter Denne kortverjonen gir en innføring i hva om ligger i begrepet
MYNDIGGJORTE MEDARBEIDERE - gir bedre pleie- og omorgtjeneter Februar 2005 FoU MYNDIGGJORTE MEDARBEIDERE - gir bedre pleie- og omorgtjeneter Denne kortverjonen gir en innføring i hva om ligger i begrepet
HØGSKOLEN I SØR TRØNDELAG AVDELING FOR TEKNOLOGI. Program for data- og elektroteknikk
 Entankprosjekt i faget Styresystemer 2EA våren 2015 Gruppe 4: Magnus A. Iversen Kristian Reitan Sinre Honelan Jon Are Kolsta Filip Robøle Myhre TANKPROSJEKT for prosjektoppgave i faget Styresystemer 2EA
Entankprosjekt i faget Styresystemer 2EA våren 2015 Gruppe 4: Magnus A. Iversen Kristian Reitan Sinre Honelan Jon Are Kolsta Filip Robøle Myhre TANKPROSJEKT for prosjektoppgave i faget Styresystemer 2EA
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro- og datateknikk 7004 TRONDHEIM
 HØGSKOLEN I SØR-RØNDELAG Avdeling for teknologi Program for elektro- og datateknikk 7004 RONDHEIM ALM005M-A Matematikk 1 Grunnlagfag - 10 tudiepoeng Cae Høt 011 Le dette ført Caen er en "hjemmeoppgave"
HØGSKOLEN I SØR-RØNDELAG Avdeling for teknologi Program for elektro- og datateknikk 7004 RONDHEIM ALM005M-A Matematikk 1 Grunnlagfag - 10 tudiepoeng Cae Høt 011 Le dette ført Caen er en "hjemmeoppgave"
Signalfiltrering. Finn Haugen TechTeach. 21. september 2003. Sammendrag
 Signalfiltrering Finn Haugen TechTeach. eptember 3 Sammendrag Dette dokumentet gir en kort bekrivele av ignalfiltrering med tidkontinuerlige, ogå kalt analoge, filtere og med tiddikrete, ogå kalt digitale,
Signalfiltrering Finn Haugen TechTeach. eptember 3 Sammendrag Dette dokumentet gir en kort bekrivele av ignalfiltrering med tidkontinuerlige, ogå kalt analoge, filtere og med tiddikrete, ogå kalt digitale,
PLS PC-øving nr. 3 Global Label og Local Label, flagg og CJ
 PLS PC-øving nr. 3 Global Label og Local Label, flagg og CJ Utgave: 1.02 Utarbeidet av: AH Dato: 10.10.12 Revidert av: AH Dato: 270114 Tema i oppgaven Oppgaven går ut på å lære seg å ta i bruk listene
PLS PC-øving nr. 3 Global Label og Local Label, flagg og CJ Utgave: 1.02 Utarbeidet av: AH Dato: 10.10.12 Revidert av: AH Dato: 270114 Tema i oppgaven Oppgaven går ut på å lære seg å ta i bruk listene
Forord. Lykke til! Ta lærevilligheten og selvtilliten på alvor, det er nå den er høyest. Terje Krogsrud Fjeld
 Forord Du har ikkert merket det allerede. Iveren, lærevilligheten og nygjerrigheten til barnet ditt. «Se på meg a!» De vil ykle. De vil tegne. De vil lære boktavene. De vil regne. Og de vil gjøre det nå.
Forord Du har ikkert merket det allerede. Iveren, lærevilligheten og nygjerrigheten til barnet ditt. «Se på meg a!» De vil ykle. De vil tegne. De vil lære boktavene. De vil regne. Og de vil gjøre det nå.
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 LM6M- Matematikk -Ekamen 9.mai HØGSKOLEN I SØR-TRØNELG veling for teknologi Kaniatnr: Ekamenato: Varighet/ekamenti: Emnekoe: Manag 9.mai 9-4 LM6M Emnenavn: Matematikk Klae(r): EL Stuiepoeng: Faglærer(e):
LM6M- Matematikk -Ekamen 9.mai HØGSKOLEN I SØR-TRØNELG veling for teknologi Kaniatnr: Ekamenato: Varighet/ekamenti: Emnekoe: Manag 9.mai 9-4 LM6M Emnenavn: Matematikk Klae(r): EL Stuiepoeng: Faglærer(e):
DEDIP2 Brukerprofil. APERAK (Kvittering faktura) til bruk for dagligvarehandelen. 7. april 2006 2. utgave
 til bruk for dagligvarehandelen. 7. april 2006 2. utgave") DEDIP2 Brukerprofil APERAK (Kvittering faktura) til bruk for dagligvarehandelen 7. april 2006 2. utgave INNHOLDFORTEGNELE: Introdukjon ide 2 Meldingtabell ide 4 Ekempel ide 6 Verjon- /endringlogg ide 8
DEDIP2 Brukerprofil APERAK (Kvittering faktura) til bruk for dagligvarehandelen 7. april 2006 2. utgave INNHOLDFORTEGNELE: Introdukjon ide 2 Meldingtabell ide 4 Ekempel ide 6 Verjon- /endringlogg ide 8
Entankprosjektrapport
 Høgskolen i Sør-Trøndelag Entankprosjektrapport Prosjektoppgave i Styresystemer 2AEL13H våren 2015 Gruppe 6 Emil Hatletveit Kristian Strøm Terje Magnus Sørensen Stian Berg Dyrnes Snorre Vongraven Andreas
Høgskolen i Sør-Trøndelag Entankprosjektrapport Prosjektoppgave i Styresystemer 2AEL13H våren 2015 Gruppe 6 Emil Hatletveit Kristian Strøm Terje Magnus Sørensen Stian Berg Dyrnes Snorre Vongraven Andreas
Formelsamling i Regtek. Andreas Klausen. (Kontrollør Sondre S. Tørdal) 4. september 2012
 4. september 2012") Formelamling i Regtek Andrea Klauen (Kontrollør Sondre S. Tørdal) 4. eptember 0 Bruk på eget anvar. Innhold Ziegler Nochlie PID tuning 3. Open Loop.............................. 3. Cloed loop..............................
Formelamling i Regtek Andrea Klauen (Kontrollør Sondre S. Tørdal) 4. eptember 0 Bruk på eget anvar. Innhold Ziegler Nochlie PID tuning 3. Open Loop.............................. 3. Cloed loop..............................
Vidar Lund Kjørelengdedatabasen Dokumentasjon
 Notater 27/2011 Vidar Lund Kjørelengdedatabaen Dokumentajon Statitik entralbyrå Statitic Norway Olo Kongvinger Notater I denne erien publiere dokumentajon, metodebekriveler, modellbekriveler og tandarder.
Notater 27/2011 Vidar Lund Kjørelengdedatabaen Dokumentajon Statitik entralbyrå Statitic Norway Olo Kongvinger Notater I denne erien publiere dokumentajon, metodebekriveler, modellbekriveler og tandarder.
PD-regulator med faseforbedrende egenskaper. Denne ma dessuten klare
 Norge teknik naturvitenkapelige univeritet Intitutt for teknik kybernetikk Oktober 99/PJN, September 9 /MPF Utlevert:..9 0 SERVOTENI Lningforlag ving 0 a) Oppgave Vi kriver h() pa formen ( +0:)( ; 0:)
Norge teknik naturvitenkapelige univeritet Intitutt for teknik kybernetikk Oktober 99/PJN, September 9 /MPF Utlevert:..9 0 SERVOTENI Lningforlag ving 0 a) Oppgave Vi kriver h() pa formen ( +0:)( ; 0:)
Betinget bevegelse og friksjon
 Betinget beegele og rikjon 1.0.014 nete uke: ingen orelening (17. og 19.) ingen ata erkte (19. og 1.) gruppetimer om anlig Manag, 17.. innleering oblig 3 Manag, 4.. ingen innleering jane or repetijon FYS-MEK
Betinget beegele og rikjon 1.0.014 nete uke: ingen orelening (17. og 19.) ingen ata erkte (19. og 1.) gruppetimer om anlig Manag, 17.. innleering oblig 3 Manag, 4.. ingen innleering jane or repetijon FYS-MEK
Høgskolen i Østfold Avdeling for informasjonsteknologi. Programmering av PLS-styrt Modellandsby ved hjelp av Phoenix Profinet / PCWorX
 Høgskolen i Østfold Avdeling for informasjonsteknologi Industriell IT ITD30005 Lab 1 (Gruppeoppgave) Programmering av PLS-styrt Modellandsby ved hjelp av Phoenix Profinet / PCWorX Remmen 03.sept 2015 Revidert:
Høgskolen i Østfold Avdeling for informasjonsteknologi Industriell IT ITD30005 Lab 1 (Gruppeoppgave) Programmering av PLS-styrt Modellandsby ved hjelp av Phoenix Profinet / PCWorX Remmen 03.sept 2015 Revidert:
Forprosjektrapport. Prosjektoppgave i Styresystemer 2AEL13H våren 2015
 Høgskolen i Sør-Trøndelag Forprosjektrapport Prosjektoppgave i Styresystemer 2AEL13H våren 2015 Gruppe 6 Emil Hatletveit Kristian Strøm Terje Magnus Sørensen Stian Berg Dyrnes Snorre Vongraven Andreas
Høgskolen i Sør-Trøndelag Forprosjektrapport Prosjektoppgave i Styresystemer 2AEL13H våren 2015 Gruppe 6 Emil Hatletveit Kristian Strøm Terje Magnus Sørensen Stian Berg Dyrnes Snorre Vongraven Andreas
Internett og pc Brukerveiledning
 Internett og pc Brukerveiledning 1 Klar for internett fra Altibox og BKK? 1 Klar for internett fra Altibox og BKK? 2 Oppett 3 Oppkobling 4 Oppkobling 5 Koble 6 Opprette av trådlø router og brannmur i hjemmeentralen
Internett og pc Brukerveiledning 1 Klar for internett fra Altibox og BKK? 1 Klar for internett fra Altibox og BKK? 2 Oppett 3 Oppkobling 4 Oppkobling 5 Koble 6 Opprette av trådlø router og brannmur i hjemmeentralen
Komme i gang med Skoleportalen
 Generell brukerveiledning for Elevportalen Denne elevportalen er best egnet i nettleseren Internett Explorer. Dersom du opplever kompatibilitets-problemer kan det skyldes at du bruker en annen nettleser.
Generell brukerveiledning for Elevportalen Denne elevportalen er best egnet i nettleseren Internett Explorer. Dersom du opplever kompatibilitets-problemer kan det skyldes at du bruker en annen nettleser.
Statens vegvesen. 14.637 Kapillær sugehastighet og porøsitet, PF. Omfang. Referanser. Utstyr. Fremgangsmåte. Full prosedyre
 Staten vegveen 14.6 Betong og materialer til betong 14.63 Underøkele av herdet betong 14.637 - ide 1 av 5 14.637 Kapillær ugehatighet og porøitet, PF Gjeldende proe (nov. 1996): NY Omfang Metodebekrivelen
Staten vegveen 14.6 Betong og materialer til betong 14.63 Underøkele av herdet betong 14.637 - ide 1 av 5 14.637 Kapillær ugehatighet og porøitet, PF Gjeldende proe (nov. 1996): NY Omfang Metodebekrivelen
Fysikkolympiaden Norsk finale 2013
 Nork fyikklærerforening Fyikkolympiaen Nork finale. uttakingrune Freag. mar kl. 9. til. Hjelpemiler: Tabell/formelamling, lommeregner og utelt formelark Oppgaveettet betår av 6 oppgaver på ier Lykke til!
Nork fyikklærerforening Fyikkolympiaen Nork finale. uttakingrune Freag. mar kl. 9. til. Hjelpemiler: Tabell/formelamling, lommeregner og utelt formelark Oppgaveettet betår av 6 oppgaver på ier Lykke til!
Installasjonguide LAG DIN EGEN BRUKERKONTO
 Installasjonguide LAG DIN EGEN BRUKERKONTO KONFIGURER MOT WI-FI MOTTA VIDEO-SAMTALE DEL TILGANG MED FLERE BRUKERE BEVEGELSE SENSOR CLOUD VIDEO OPPTAK KOSTNAD FOR CLOUD FEILSØKING LAG DIN EGEN BRUKERKONTO
Installasjonguide LAG DIN EGEN BRUKERKONTO KONFIGURER MOT WI-FI MOTTA VIDEO-SAMTALE DEL TILGANG MED FLERE BRUKERE BEVEGELSE SENSOR CLOUD VIDEO OPPTAK KOSTNAD FOR CLOUD FEILSØKING LAG DIN EGEN BRUKERKONTO
SLUTTPRØVE. Løsningsforslag. Antall oppgaver: 4 KANDIDATEN MÅ SELV KONTROLLERE AT OPPGAVESETTET ER FULLSTENDIG
 Høgkolen i elemark Avdeling for teknologike fag SLUPRØVE Løningforlag EMNE: EE49 Modellbaert regulering LÆRERE jell-erik Wolden og Han-Petter Halvoren LASSE(R): IA DAO: 9.5. PRØVEID, fra-til (kl.): 9..
Høgkolen i elemark Avdeling for teknologike fag SLUPRØVE Løningforlag EMNE: EE49 Modellbaert regulering LÆRERE jell-erik Wolden og Han-Petter Halvoren LASSE(R): IA DAO: 9.5. PRØVEID, fra-til (kl.): 9..
Go with the. Niende forelesning. Mye matematikk i boka her ikke så komplisert, men mye å holde styr på.
 Go with the Niende forelesning Mye matematikk i boka her ikke så komplisert, men mye å holde styr på. Fokuserer på de viktigste ideene i dagens forelesning, så det forhåpentligvis blir lettere å skjønne
Go with the Niende forelesning Mye matematikk i boka her ikke så komplisert, men mye å holde styr på. Fokuserer på de viktigste ideene i dagens forelesning, så det forhåpentligvis blir lettere å skjønne
Bruksanvisning Unitronics Vision
 Bruksanvisning Unitronics Vision Ole Einar Moe Innhold 1 Oppsett... 1 1.1 PLS... 1 1.2 Datamaskin... 2 1.3 Kommunikasjon... 2 2 Planlegging... 6 2.1 Digitale Inn/Ut ganger... 6 2.2 Analoge Inn/Ut ganger...
Bruksanvisning Unitronics Vision Ole Einar Moe Innhold 1 Oppsett... 1 1.1 PLS... 1 1.2 Datamaskin... 2 1.3 Kommunikasjon... 2 2 Planlegging... 6 2.1 Digitale Inn/Ut ganger... 6 2.2 Analoge Inn/Ut ganger...
Kapittel 1. Innledning og motivasjon. 1.1 Innledning. 1.2 Dynamiske, tjenerbaserte og interaktive nettsteder. 1.2.1 Dynamiske nettsider
 1.2. Dynamiske, tjenerbaserte og interaktive nettsteer Kapittel 1 Innlening og motivasjon 1.1 Innlening Mye av agens virksomhet på WWW, alt fra nettbanker til bibliotekkataloger, er ynamisk, interaktiv
1.2. Dynamiske, tjenerbaserte og interaktive nettsteer Kapittel 1 Innlening og motivasjon 1.1 Innlening Mye av agens virksomhet på WWW, alt fra nettbanker til bibliotekkataloger, er ynamisk, interaktiv
Oppgaver til Dynamiske systemer 1
 Oppgaver til Dynamike ytemer Oppgave 0. Lineariering av ulineær modell Likning (2.28) i læreboka er en dynamik modell av en tank med gjennomtrømning og oppvarming. Modellen gjengi her: cρv T (t) P (t)+cw(t)[t
Oppgaver til Dynamike ytemer Oppgave 0. Lineariering av ulineær modell Likning (2.28) i læreboka er en dynamik modell av en tank med gjennomtrømning og oppvarming. Modellen gjengi her: cρv T (t) P (t)+cw(t)[t
Velkommen til Pressis.
 1 Velkommen til Pressis. Dette er et veiledende dokument med linker i innledningen. Veiledningene vil ta deg igjennom de forskjellige tilkoblings muligheter du har med oss. Hvis du bare har behov for en
1 Velkommen til Pressis. Dette er et veiledende dokument med linker i innledningen. Veiledningene vil ta deg igjennom de forskjellige tilkoblings muligheter du har med oss. Hvis du bare har behov for en
Determinanter. Kapittel 6. Determinanter for 2 2-matriser. La oss beregne arealet av dette parallellogrammet. Vi tegner på noen hjelpelinjer:
 Kapittel 6 Determinanter En matrise inneholer mange tall og erme mye informasjon så mye at et kan være litt overvelene Vi kan konensere ne all informasjonen i en kvaratisk matrise til ett enkelt tall som
Kapittel 6 Determinanter En matrise inneholer mange tall og erme mye informasjon så mye at et kan være litt overvelene Vi kan konensere ne all informasjonen i en kvaratisk matrise til ett enkelt tall som
Husk at du skal ha to vinduer åpne. Det ene er 'Python Shell' og det andre er for å skrive kode i.
 Skilpaddeskolen Steg 1: Flere firkanter Nybegynner Python Åpne IDLE-editoren, og åpne en ny fil ved å trykke File > New File, og la oss begynne. Husk at du skal ha to vinduer åpne. Det ene er 'Python Shell'
Skilpaddeskolen Steg 1: Flere firkanter Nybegynner Python Åpne IDLE-editoren, og åpne en ny fil ved å trykke File > New File, og la oss begynne. Husk at du skal ha to vinduer åpne. Det ene er 'Python Shell'
Guide for tilkobling til HIKT s Citrix løsning
 Guide for tilkobling til HIKT s Citrix løsning Innhold Guide for tilkobling til HIKT s Citrix løsning... 1 Sjekk om Citrix er installert... 1 Tilgang til applikasjon fra kontoret... 2 Tilgang til applikasjon
Guide for tilkobling til HIKT s Citrix løsning Innhold Guide for tilkobling til HIKT s Citrix løsning... 1 Sjekk om Citrix er installert... 1 Tilgang til applikasjon fra kontoret... 2 Tilgang til applikasjon
Logaritmer og eksponentialfunksjoner
 Logaritmer og eksponentialfunksjoner Dette er fra e to første forelesningene i MA02 våren 2008. Noe er skrevet mer ut, men mange etaljer er utelatt. De er utelatt me vilje, for at u skal fylle em ut selv!
Logaritmer og eksponentialfunksjoner Dette er fra e to første forelesningene i MA02 våren 2008. Noe er skrevet mer ut, men mange etaljer er utelatt. De er utelatt me vilje, for at u skal fylle em ut selv!
Totankrapport PROSJEKT I FAGET STYRESYSTEMER NORGES TEKNINSK-NATURVITENSKAPLIGE UNIVERSITET
 Totankrapport PROSJEKT I FAGET STYRESYSTEMER NORGES TEKNINSK-NATURVITSKAPLIGE UNIVERSITET 04.05.206 Gruppe 3 Joakim Hage Jona Hagen Aner Kregne Sigur Rø Brekk Ørjan S. Karlen Axel Hanen Grøval Gruppe 4
Totankrapport PROSJEKT I FAGET STYRESYSTEMER NORGES TEKNINSK-NATURVITSKAPLIGE UNIVERSITET 04.05.206 Gruppe 3 Joakim Hage Jona Hagen Aner Kregne Sigur Rø Brekk Ørjan S. Karlen Axel Hanen Grøval Gruppe 4
TALM1003-A Matematikk 1 Grunnlagsfag - 10 studiepoeng
 HØGSKOLEN I SØR-RØNDELAG Avdeling for teknologi Progra for elektro- og datateknikk 7004 RONDHEIM ALM1003-A Mateatikk 1 Grunnlagfag - 10 tudiepoeng Cae: Regulering av vækenivået i en tank Høt 013 Le dette
HØGSKOLEN I SØR-RØNDELAG Avdeling for teknologi Progra for elektro- og datateknikk 7004 RONDHEIM ALM1003-A Mateatikk 1 Grunnlagfag - 10 tudiepoeng Cae: Regulering av vækenivået i en tank Høt 013 Le dette
FYS3220 Forelesningsnotat H.Balk
 FYS3 Foreleningnotat H.Balk Innhold Forelening filter NOMAISEING, POTOTYPEFITE OG SKAEING... POTOTYPE FITE... Frekvenkalering... IMPEDANSSKAEING...4 Ekempel på kombinert frekven- og impedankalering...6
FYS3 Foreleningnotat H.Balk Innhold Forelening filter NOMAISEING, POTOTYPEFITE OG SKAEING... POTOTYPE FITE... Frekvenkalering... IMPEDANSSKAEING...4 Ekempel på kombinert frekven- og impedankalering...6
Kap. 10: Inferens om to populasjoner. Inferens om forskjell i forventning ved å bruke to avhengige utvalg (10.3) ST0202 Statistikk for samfunnsvitere
 ST0202 Statistikk for samfunnsvitere") Kap. 0: Inferen om to populajoner Situajon: Det er to populajoner om vi ønker å ammenligne. Vi trekker da et utvalg fra hver populajon. Vi kan ha avhengige eller uavhengige utvalg. ST00 Statitikk for amfunnvitere
Kap. 0: Inferen om to populajoner Situajon: Det er to populajoner om vi ønker å ammenligne. Vi trekker da et utvalg fra hver populajon. Vi kan ha avhengige eller uavhengige utvalg. ST00 Statitikk for amfunnvitere
Eksamen S2 høst 2009 Løsning Del 1
 S Ekamen, høten 009 Løning Ekamen S høt 009 Løning Del Oppgave a) Deriver funkjonene: ) ln f f ln ln f ln ln f f ) g e e u, u g e e g e e e g 6e b) Vi har en aritmetik rekke der a 8 og a8. Betem a, d og
S Ekamen, høten 009 Løning Ekamen S høt 009 Løning Del Oppgave a) Deriver funkjonene: ) ln f f ln ln f ln ln f f ) g e e u, u g e e g e e e g 6e b) Vi har en aritmetik rekke der a 8 og a8. Betem a, d og
Brukerveiledning for Digifob Pro
 Brukerveiledning for Digifob Pro Instek AS Adresse: Mårveien 6 2211 Kongsvinger Telefon: 62816833 Epost: instek@instek.no Overblikk over DigifobPro Denne guiden vil ta for seg generel bruk av digifob.
Brukerveiledning for Digifob Pro Instek AS Adresse: Mårveien 6 2211 Kongsvinger Telefon: 62816833 Epost: instek@instek.no Overblikk over DigifobPro Denne guiden vil ta for seg generel bruk av digifob.
AVDELING FOR TEKNISK-NATURVITENSKAPELIGE FAG HOVEDOPPGAVE. Forfatter: Bjørnar Heide Knudsen. Faglig ansvarlig og veileder: Jan Erik Vinnem
 AVDELING FOR TEKNISK-NATURVITENSKAPELIGE FAG HOVEDOPPGAVE Intitutt for petroleumteknologi: Sivilingeniørtudium i Samfunnikkerhet Våremeteret 2003 Åpen Forfatter: Bjørnar Heide Knuden Faglig anvarlig og
AVDELING FOR TEKNISK-NATURVITENSKAPELIGE FAG HOVEDOPPGAVE Intitutt for petroleumteknologi: Sivilingeniørtudium i Samfunnikkerhet Våremeteret 2003 Åpen Forfatter: Bjørnar Heide Knuden Faglig anvarlig og
TERA System Quick Start Guide (Norsk)
") TERA System Quick Start Guide (Norsk) 1. Pakk ut drivere fra Driver Installation Tool.zip filen slik at du får en mappe \Driver Installation Tool\... 2. Hvis du har en 64bit operativt system kjør installasjon
TERA System Quick Start Guide (Norsk) 1. Pakk ut drivere fra Driver Installation Tool.zip filen slik at du får en mappe \Driver Installation Tool\... 2. Hvis du har en 64bit operativt system kjør installasjon
PLS PC-øving nr. 2 Trening i programmering
 PLS PC-øving nr. 2 Trening i programmering Utgave: 1.02 Utarbeidet av: AH Dato: 03.10.12 Revidert av: AH Dato:020914 Tema i oppgaven Del 1 Med utgangspunkt i små programbiter i ladderdiagram, LD, skal
PLS PC-øving nr. 2 Trening i programmering Utgave: 1.02 Utarbeidet av: AH Dato: 03.10.12 Revidert av: AH Dato:020914 Tema i oppgaven Del 1 Med utgangspunkt i små programbiter i ladderdiagram, LD, skal
Brukermanual Scriptor 2006 Side 1 av 7. Brukermanual. Scriptor 2006. Copyright AESTON
 Brukermanual Scriptor 2006 Side 1 av 7. Brukermanual Scriptor 2006 Brukermanual Scriptor 2006 Side 2 av 7. Innlogging... 3 Internet Explorer forberedelse... 3 Norton Internet Security Forberedelse... 4
Brukermanual Scriptor 2006 Side 1 av 7. Brukermanual Scriptor 2006 Brukermanual Scriptor 2006 Side 2 av 7. Innlogging... 3 Internet Explorer forberedelse... 3 Norton Internet Security Forberedelse... 4
Laget av Atle Hybertsen Høst 2017
 101 Innholdsfortegnelse 1- Laste ned programmet 2- Oppstart 3- Betydninger basic 4- Basic program og funksjoner 5- Forklaringer av ord og forkortelser 6- Analog inn og ut oppsett 7- Betydninger avansert
101 Innholdsfortegnelse 1- Laste ned programmet 2- Oppstart 3- Betydninger basic 4- Basic program og funksjoner 5- Forklaringer av ord og forkortelser 6- Analog inn og ut oppsett 7- Betydninger avansert
(jω) [db] PID. 1/T i PI - 90
![(jω) [db] PID. 1/T i PI - 90](/thumbs/92/110884697.jpg "(jω) [db] PID. 1/T i PI - 90") 138 Oppgaver til Praktik reguleringteknikk H r (jω) [db] PID T d /T f PI 0 db arg H r (jω) [grader] 90 1/T i 1/T d 1/T f PID ω (logaritmik) 0 PI - 90 Figur 69: Løning 9.4: Aymptotike og (omtrentlige) ekakte
138 Oppgaver til Praktik reguleringteknikk H r (jω) [db] PID T d /T f PI 0 db arg H r (jω) [grader] 90 1/T i 1/T d 1/T f PID ω (logaritmik) 0 PI - 90 Figur 69: Løning 9.4: Aymptotike og (omtrentlige) ekakte
Forprosjektrapport Prosjektoppgave i faget Styresystemer 2EA våren 2015
 rapport Prosjektoppgave i faget Styresystemer 2EA våren 2015 Gruppe 5 Prosjektoppgave, forprosjekt Prosjekt Styresystemer & Reguleringsteknikk Gruppe 5 (AR) Oppgavens tittel: Prosjektoppgave i faget Styresystemer
rapport Prosjektoppgave i faget Styresystemer 2EA våren 2015 Gruppe 5 Prosjektoppgave, forprosjekt Prosjekt Styresystemer & Reguleringsteknikk Gruppe 5 (AR) Oppgavens tittel: Prosjektoppgave i faget Styresystemer
AirLink 2200 FAQ. Side 2 Side 2 Side 3 Side 4 Side 6 Side 7 Side 8 Side 10 Side 11 Side 12 Side 13 Side 13 Side 14 Side 15 Side 16 Side 18
 AirLink 2200 FAQ Side 2 Side 2 Side Side Side 6 Side 7 Side 8 Side 10 Side 11 Side 12 Side 1 Side 1 Side 1 Side 15 Side 16 Side 18 Hva er AL2200AC? Hva er dual-band? Hva er forskjellen på AP, Repeater
AirLink 2200 FAQ Side 2 Side 2 Side Side Side 6 Side 7 Side 8 Side 10 Side 11 Side 12 Side 1 Side 1 Side 1 Side 15 Side 16 Side 18 Hva er AL2200AC? Hva er dual-band? Hva er forskjellen på AP, Repeater
Kjernejournal. Pilotering - Javafri oppkobling
 Kjernejournal Pilotering - Javafri oppkobling 07-01-2016 Kolofon Publikasjonens tittel: Tilrettelegging mot kjernejournal med Commfides Utgitt: 16.03.16 Publikasjonsnummer: Utgitt av: Direktoratet for
Kjernejournal Pilotering - Javafri oppkobling 07-01-2016 Kolofon Publikasjonens tittel: Tilrettelegging mot kjernejournal med Commfides Utgitt: 16.03.16 Publikasjonsnummer: Utgitt av: Direktoratet for
Uponor Smatrix for vannbåren varme og kjøling. Prisliste 2016
 Smatrix for vannåren varme og kjøling Prisliste 2016 Smatrix Wave Plus Tråløs romregulering Smatrix Wave Plus Sentralenet X-165 me Manøverpanel I-167 Tråløs sentralenet og manøverpanel me erøringsskjerm
Smatrix for vannåren varme og kjøling Prisliste 2016 Smatrix Wave Plus Tråløs romregulering Smatrix Wave Plus Sentralenet X-165 me Manøverpanel I-167 Tråløs sentralenet og manøverpanel me erøringsskjerm
Høgskolen i Østfold Avdeling for informasjonsteknologi. Fag ITD 30005 Industriell IT. Laboppgave 2. Del 1. Temperatur-regulering
 Høgskolen i Østfold Avdeling for informasjonsteknologi Fag ITD 30005 Industriell IT Laboppgave 2. Del 1. Temperatur-regulering Frist for innlevering: Tirsdag 20.okt 2015 Remmen 01.10.2015 00 Sept 10 Temperaturregulering
Høgskolen i Østfold Avdeling for informasjonsteknologi Fag ITD 30005 Industriell IT Laboppgave 2. Del 1. Temperatur-regulering Frist for innlevering: Tirsdag 20.okt 2015 Remmen 01.10.2015 00 Sept 10 Temperaturregulering
Studieplan for videreutdanning i Kontoransatte i BUP, del II. 15 studiepoeng
 Studieplan for videreutdanning i Kontoranatte i BUP, del II 15 tudiepoeng Høgkolen i Sør-Trøndelag Avdeling for hele-og oialfag 2004 Godkjent avdelingtyret AHS 09.12.04 Etableringtillatele gitt av Avdelingtyret
Studieplan for videreutdanning i Kontoranatte i BUP, del II 15 tudiepoeng Høgkolen i Sør-Trøndelag Avdeling for hele-og oialfag 2004 Godkjent avdelingtyret AHS 09.12.04 Etableringtillatele gitt av Avdelingtyret
Årsplan spansk 10. klasse
 Årplan pank 10. klae 2015/ 2016 Faglærer: Timetall: David Romero t. pr. uke. Læreverk: Amigo tre texto Gyldendal Forlag Amigo tre Ejercicio Gyldendal Forlag Kopier Nettiden: www.gyldendal.no/amigo Lytte-cd-er
Årplan pank 10. klae 2015/ 2016 Faglærer: Timetall: David Romero t. pr. uke. Læreverk: Amigo tre texto Gyldendal Forlag Amigo tre Ejercicio Gyldendal Forlag Kopier Nettiden: www.gyldendal.no/amigo Lytte-cd-er
SIMULERINGSNOTAT. Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 01. Laget av Torbjørn Morken Øyvind Eklo
 SIMULERINGSNOTAT Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 01 Laget av Torbjørn Morken Øyvind Eklo Høgskolen i Sør-Trøndelag 2015 Sammendrag Simulering av nivåregulering av tank ved
SIMULERINGSNOTAT Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 01 Laget av Torbjørn Morken Øyvind Eklo Høgskolen i Sør-Trøndelag 2015 Sammendrag Simulering av nivåregulering av tank ved
TOTANK RAPPORT. Gruppe 1 og 2
 TOTANK RAPPORT Gruppe 1 og 2 Høgskolen i Sør-Trøndelag 2015 Sammendrag Totank-prosjektet og bonusoppgaven er deler av ett større prosjekt i faget «Reguleringsteknikk og styresystemer» for 2EA. Totank-prosjektet
TOTANK RAPPORT Gruppe 1 og 2 Høgskolen i Sør-Trøndelag 2015 Sammendrag Totank-prosjektet og bonusoppgaven er deler av ett større prosjekt i faget «Reguleringsteknikk og styresystemer» for 2EA. Totank-prosjektet
UNIVERSITETET I OSLO
 Kandidatnr.: Side UNIVERSITETET I OSLO et matematik-naturvitenkapelige fakultet Ekamen i: Ekamendag: Tid for ekamen: Oppgaveettet er på Vedlegg: Tillatte hjelpemidler: INF4 Ondag 29. november kl. 4:3-8:3
Kandidatnr.: Side UNIVERSITETET I OSLO et matematik-naturvitenkapelige fakultet Ekamen i: Ekamendag: Tid for ekamen: Oppgaveettet er på Vedlegg: Tillatte hjelpemidler: INF4 Ondag 29. november kl. 4:3-8:3
Installasjon og Oppsett av Weather Display Denne artikkelen er ment å være en hjelp til å laste ned, installere og sette opp Weather Display.
 Installasjon og Oppsett av Weather Display Denne artikkelen er ment å være en hjelp til å laste ned, installere og sette opp Weather Display. 1. Laste ned programmet Gå til http://www.weather-display.com/files.php
Installasjon og Oppsett av Weather Display Denne artikkelen er ment å være en hjelp til å laste ned, installere og sette opp Weather Display. 1. Laste ned programmet Gå til http://www.weather-display.com/files.php
Etterklangsmåling ved Kristiansund videregående skole
 Bedriftnavn: Hjelp24 a Kritianund videregående kole v/ Marit Bjerketrand Sankthanhaugen 2 6514 KRISIANSUND N Kopi er endt: Gunhild Bergem, Johan Leite Hjelp24 a HMS Bruhagen Sentrumbygg 6530 AVERØY lf:
Bedriftnavn: Hjelp24 a Kritianund videregående kole v/ Marit Bjerketrand Sankthanhaugen 2 6514 KRISIANSUND N Kopi er endt: Gunhild Bergem, Johan Leite Hjelp24 a HMS Bruhagen Sentrumbygg 6530 AVERØY lf:
Visma Flyt skole. Foresatte
 Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 30.11.2015 Innhold Innlogging:... 3 Oversiktsbildet... 4 Samtykke... 5 Info/foresatte... 6 Fravær... 7 Anmerkninger... 8 Karakterer...
Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 30.11.2015 Innhold Innlogging:... 3 Oversiktsbildet... 4 Samtykke... 5 Info/foresatte... 6 Fravær... 7 Anmerkninger... 8 Karakterer...
En liten oppskrift på hvordan jeg installert og fikk Xastir til å virke sånn at jeg ble synlig i APRS verden.
 En liten oppskrift på hvordan jeg installert og fikk Xastir til å virke sånn at jeg ble synlig i APRS verden. La meg med en gang si at jeg er rimelig grønn i Linux verden så dere får bære over med meg
En liten oppskrift på hvordan jeg installert og fikk Xastir til å virke sånn at jeg ble synlig i APRS verden. La meg med en gang si at jeg er rimelig grønn i Linux verden så dere får bære over med meg
RIMELIGE KVALITETSUTSKRIFTER FOR DITT KONTOR
 RIMELIGE KVALITETSUTSKRIFTER FOR DITT KONTOR www.brother.no VI PRESENTERER DEN NYE KOMPAKTE MONOLASERSERIEN KVALITETSUTSKRIFTER FOR KONTORET Brother er klar over at bedrifter er helt avhengige av informajon.
RIMELIGE KVALITETSUTSKRIFTER FOR DITT KONTOR www.brother.no VI PRESENTERER DEN NYE KOMPAKTE MONOLASERSERIEN KVALITETSUTSKRIFTER FOR KONTORET Brother er klar over at bedrifter er helt avhengige av informajon.
Visma Flyt skole. Foresatte
 Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 23.03.2016 Innhold Innlogging:... 3 Oversiktsbildet... 4 Meldinger... 5 Samtykke... 6 Info/foresatte... 6 Fravær... 7 Anmerkninger...
Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 23.03.2016 Innhold Innlogging:... 3 Oversiktsbildet... 4 Meldinger... 5 Samtykke... 6 Info/foresatte... 6 Fravær... 7 Anmerkninger...
FTP Info til brukerne
 FTP Info til brukerne Ftp-serveren til Statens vegvesen er tenkt benyttet for brukere som trenger å utveksle store filer. Det presiseres at ftp-serveren kun er beregnet for utveksling av filer, ikke for
FTP Info til brukerne Ftp-serveren til Statens vegvesen er tenkt benyttet for brukere som trenger å utveksle store filer. Det presiseres at ftp-serveren kun er beregnet for utveksling av filer, ikke for
TRANSISTOR SOM BRYTER anvendt i enkle logiske CMOS
 el : Grunnleggene igitl CMO NGVR ERG I. Innhol. pmo trnitor TRNITOR OM RTER nvent i enkle logike CMO porter. erie- og prllellkoling v nno- og pmo trnitorer. Inverter, NN, NOR og generelle porter. Komple-
el : Grunnleggene igitl CMO NGVR ERG I. Innhol. pmo trnitor TRNITOR OM RTER nvent i enkle logike CMO porter. erie- og prllellkoling v nno- og pmo trnitorer. Inverter, NN, NOR og generelle porter. Komple-
Logg inn og introduksjon # 1. Endre passord # 2. Medlemsliste # 3. Registrere et nytt medlem/ny medarbeider # 4. Registrering av tidligere medlem # 5
 FOCUSNET Brukerveiledning - Hovedleder SØNDAGSSKOLEN NORGE Oppdatert oktober 2013 Logg inn og introduksjon # 1 Endre passord # 2 Medlemsliste # 3 Registrere et nytt medlem/ny medarbeider # 4 Registrering
FOCUSNET Brukerveiledning - Hovedleder SØNDAGSSKOLEN NORGE Oppdatert oktober 2013 Logg inn og introduksjon # 1 Endre passord # 2 Medlemsliste # 3 Registrere et nytt medlem/ny medarbeider # 4 Registrering
For mer informasjon om SQL Server 2014 Express, se Microsoft sine nettsider: https://msdn.microsoft.com/en-us/sqlserver2014express.
 1 Innholdsfortegnelse Microsoft SQL Server 2014 Express... 3 Nedlastning av installasjonsfil for SQL Server 2014 Express... 3 Installasjon av SQL Server 2014 Express... 4 Installasjon av Huldt & Lillevik
1 Innholdsfortegnelse Microsoft SQL Server 2014 Express... 3 Nedlastning av installasjonsfil for SQL Server 2014 Express... 3 Installasjon av SQL Server 2014 Express... 4 Installasjon av Huldt & Lillevik
s Den hydrauliske diameter er gitt ved d h = 4 hvor A er rørets tverrsnitt og O er den delen ) 2 d 2
 2 d 2") Strøninglære. Reynol tall. I 88 oaget Reynol at et finne to tyer trøning, nelig lainær trøning og turbulent trøning. Oergangen ello ie to tyene kjee e en i kritik atiget. Reynol utiklet et ienjonløt tall,
Strøninglære. Reynol tall. I 88 oaget Reynol at et finne to tyer trøning, nelig lainær trøning og turbulent trøning. Oergangen ello ie to tyene kjee e en i kritik atiget. Reynol utiklet et ienjonløt tall,
FYS3220 Filteroppave Oppgave og løsningsforslag v. H.Balk
 FYS0 Filteroppave Oppgave og løningforlag v. H.Balk 0_Paivt -orden hebyhev P til HP konvertering, prototype impedan og frekven kalering. -orden hebychev filter, prototype filter, frekven kalering, impedan
FYS0 Filteroppave Oppgave og løningforlag v. H.Balk 0_Paivt -orden hebyhev P til HP konvertering, prototype impedan og frekven kalering. -orden hebychev filter, prototype filter, frekven kalering, impedan
Saaghus kurs & foredrag. Endringsforståelse når endringer skaper indre og ytre reaksjoner. Mediehåndtering vær forberedt før media tar kontakt
 Saaghus kurs & forerag Ranveig Rønningen Saaghus holer kurs og forerag for små og store virksomheter. Alle kurs vinkles i forhol til kunens behov og situasjon. Kursene er en variasjon av unervisning, iskusjon,
Saaghus kurs & forerag Ranveig Rønningen Saaghus holer kurs og forerag for små og store virksomheter. Alle kurs vinkles i forhol til kunens behov og situasjon. Kursene er en variasjon av unervisning, iskusjon,
Analyse av passive elektriske filtrer
 HØGSKOEN I SØ-TØNDEAG Avdeling for teknologi Program for elektro- og datateknikk 7004 TONDHEIM TAM004-A Matematikk 2 (Grunnlagfag, 0 tudiepoeng) ærebok: Anthony roft, obert Davion, Martin Hargreave: Engineering
HØGSKOEN I SØ-TØNDEAG Avdeling for teknologi Program for elektro- og datateknikk 7004 TONDHEIM TAM004-A Matematikk 2 (Grunnlagfag, 0 tudiepoeng) ærebok: Anthony roft, obert Davion, Martin Hargreave: Engineering
ivisjon TV BRUKERVEILEDNING
 ivisjon TV BRUKERVEILEDNING INNHOLDSFORTEGNELSE GENERELT OM BRUK...3 Set Top Boks og fjernkontroll...3 INSTALLASJON...4 Slik går du frem:...4 STB 500-serie...6 SET TOP BOKSEN SETT BAKFRA...6 TILKOBLING...7
ivisjon TV BRUKERVEILEDNING INNHOLDSFORTEGNELSE GENERELT OM BRUK...3 Set Top Boks og fjernkontroll...3 INSTALLASJON...4 Slik går du frem:...4 STB 500-serie...6 SET TOP BOKSEN SETT BAKFRA...6 TILKOBLING...7
Visma Flyt skole. Foresatte
 Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 05.02.2015 Innhold Innlogging:... 3 Oversiktsbildet... 4 Info/foresatte... 5 Fravær... 6 Anmerkninger... 6 Karakterer... 6 Vurdering...
Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 05.02.2015 Innhold Innlogging:... 3 Oversiktsbildet... 4 Info/foresatte... 5 Fravær... 6 Anmerkninger... 6 Karakterer... 6 Vurdering...
Fart. Eksempel: Gjennomsnittsfart
 Far ALV EGELAND, NAROM Når vi ilbakelegger 100 km i løpe av 2 imer uavhengig av om vi opper unervei har vi en gjennomnifar på 50 km/h. Vi ville ha bruk like lang i erom vi hae kjør me konan far på 50 km/h.
Far ALV EGELAND, NAROM Når vi ilbakelegger 100 km i løpe av 2 imer uavhengig av om vi opper unervei har vi en gjennomnifar på 50 km/h. Vi ville ha bruk like lang i erom vi hae kjør me konan far på 50 km/h.
Straffespark Introduksjon Scratch Lærerveiledning
 Straffespark Introduksjon Scratch Lærerveiledning Introduksjon Vi skal lage et enkelt fotballspill, hvor du skal prøve å score på så mange straffespark som mulig. Steg 1: Katten og fotballbanen Vi begynner
Straffespark Introduksjon Scratch Lærerveiledning Introduksjon Vi skal lage et enkelt fotballspill, hvor du skal prøve å score på så mange straffespark som mulig. Steg 1: Katten og fotballbanen Vi begynner
VÅGEN EIENDOM. Alle skal inn i eiendom! Vi setter fokus på eiendomshandel og syndikering. Les mer side 2 og 3 NYTT FRA. Nr 1-2005 - 3.
 NYTT FRA VÅGEN EIENDOM Nr 1-2005 - 3. årgang Samtlige 250 andeler á 100.000 ble revet bort på én dag da FIRST Securitie og SR-Bank kulle yndikere denne eiendommen i Petroleumveien 6 i deember 2004. Alle
NYTT FRA VÅGEN EIENDOM Nr 1-2005 - 3. årgang Samtlige 250 andeler á 100.000 ble revet bort på én dag da FIRST Securitie og SR-Bank kulle yndikere denne eiendommen i Petroleumveien 6 i deember 2004. Alle
Samfunnsøkonomi andre avdeling, mikroøkonomi, Diderik Lund, 13. mars 2002
 Samfunnøkonomi andre avdeling, mikroøkonomi, Diderik Lund, 3. mar 00 Måling av graden av riikoaverjon Blant konkave nyttefunkjoner: Mer konkav betyr terkere riikoaverjon Vanlig å måle grad av konkavitet
Samfunnøkonomi andre avdeling, mikroøkonomi, Diderik Lund, 3. mar 00 Måling av graden av riikoaverjon Blant konkave nyttefunkjoner: Mer konkav betyr terkere riikoaverjon Vanlig å måle grad av konkavitet
TR ansistor som bryter anvendt i enkle logiske CMOS porter.
 el : Grunnleene iitl CMO NGVR ERG I. Innhol TR nitor om ryter nvent i enkle loike CMO porter. erie- o prllellkolin v nno- o pmo trnitorer. Inverter, NN. NOR o enerelle porter. Komplementær CMO me opptrekk
el : Grunnleene iitl CMO NGVR ERG I. Innhol TR nitor om ryter nvent i enkle loike CMO porter. erie- o prllellkolin v nno- o pmo trnitorer. Inverter, NN. NOR o enerelle porter. Komplementær CMO me opptrekk
BRUKERMANUAL. App for Beha smartovn
 BRUKERMANUAL App for Beha smartovn OVNEN SKAL IKKE VÆRE TILKOBLET STRØM. APPEN GIR BESKJED OM NÅR OVNEN SKAL TILKOBLES. Bruk ovnen som smartovn ved hjelp av app-styring Last ned appen «SmartHeather Beha»
BRUKERMANUAL App for Beha smartovn OVNEN SKAL IKKE VÆRE TILKOBLET STRØM. APPEN GIR BESKJED OM NÅR OVNEN SKAL TILKOBLES. Bruk ovnen som smartovn ved hjelp av app-styring Last ned appen «SmartHeather Beha»
VANNKRAFTLABORATORIET
 VANNKRAFLABORAORIE INRODUKSJON Preentajon av PhD tuentene arbei SYSEMDYNAMIKK I VANNKRAFVERK 1 PhD Oppgaver Einar: rykkvibrajoner i Franciturbiner Jørgen: Virkninggramålinger lave fall Pål-ore: ap i ikke-tajonær
VANNKRAFLABORAORIE INRODUKSJON Preentajon av PhD tuentene arbei SYSEMDYNAMIKK I VANNKRAFVERK 1 PhD Oppgaver Einar: rykkvibrajoner i Franciturbiner Jørgen: Virkninggramålinger lave fall Pål-ore: ap i ikke-tajonær
Verden. Introduksjon. Skrevet av: Kine Gjerstad Eide og Ruben Gjerstad Eide
 Verden Skrevet av: Kine Gjerstad Eide og Ruben Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon Velkommen
Verden Skrevet av: Kine Gjerstad Eide og Ruben Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon Velkommen
PCK Håndterminal. Brukerveiledning
 PCK Håndterminal Brukerveiledning Velkommen som bruker av PCK Håndterminal. I denne manualen skal vi gå igjennom installasjon og bruk av håndterminal programvaren fra. For å benytte håndterminal sammen
PCK Håndterminal Brukerveiledning Velkommen som bruker av PCK Håndterminal. I denne manualen skal vi gå igjennom installasjon og bruk av håndterminal programvaren fra. For å benytte håndterminal sammen
Tabellen viser en serie med verdier for den uavhengige variabelen, og viser den tilhørende verdien til den avhengige variabelen.
 Kapittel 13: Tabeller 13 Oversikt over tabeller... 222 Oversikt over fremgangsmåten for å generere en en tabell... 223 Velge tabellparametre... 224 Vise en automatisk tabell... 226 Bygge en manuell tabell
Kapittel 13: Tabeller 13 Oversikt over tabeller... 222 Oversikt over fremgangsmåten for å generere en en tabell... 223 Velge tabellparametre... 224 Vise en automatisk tabell... 226 Bygge en manuell tabell
LØSNINGSFORSLAG Eksamen i emne SIE4006, Digitalteknikk med kretsteknikk, fredag 16. mai 2003
 Side av 6 LØSNINGSFORSLAG Ekamen i emne SIE4006, Digitalteknikk med kretteknikk, fredag 6. mai 2003 Oppgave a) Kirchoff trømlov: Den algebraike um av alle grentrømmer i et knutepunkt i en kret er lik null
Side av 6 LØSNINGSFORSLAG Ekamen i emne SIE4006, Digitalteknikk med kretteknikk, fredag 6. mai 2003 Oppgave a) Kirchoff trømlov: Den algebraike um av alle grentrømmer i et knutepunkt i en kret er lik null
Vil du si at en nybegynner i felespill baserer sitt spill hovedsakelig på foroverkopling eller på tilbakekopling? Hva med en profesjonell utøver?
 Kapittel 10 Foroverkopling 10.1 Innledning Oppgave 10.1 Felepiller Vil du i at en nybegynner i felepill baerer itt pill hovedakelig på foroverkopling eller på tilbakekopling? Hva med en profejonell utøver?
Kapittel 10 Foroverkopling 10.1 Innledning Oppgave 10.1 Felepiller Vil du i at en nybegynner i felepill baerer itt pill hovedakelig på foroverkopling eller på tilbakekopling? Hva med en profejonell utøver?
Nettverksnavn og nettverkspassord (SSID og WPA)
") Routeren du har fått fra oss skal være ferdig konfigurert. Du kan gjøre endringer ved å følge denne brukerveiledningen. Alle endringer gjøres på eget ansvar. Vi anbefaler at du kobler en PC direkte i routeren
Routeren du har fått fra oss skal være ferdig konfigurert. Du kan gjøre endringer ved å følge denne brukerveiledningen. Alle endringer gjøres på eget ansvar. Vi anbefaler at du kobler en PC direkte i routeren
Visma Flyt skole. Foresatte
 Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 01.02.2016 Innhold Innlogging:... 3 Oversiktsbildet... 4 Samtykke... 5 Info/foresatte... 5 Fravær... 6 Anmerkninger... 6 Karakterer...
Visma Flyt skole Foresatte 1 Foresatte Visma Flyt Skole sist endret: 01.02.2016 Innhold Innlogging:... 3 Oversiktsbildet... 4 Samtykke... 5 Info/foresatte... 5 Fravær... 6 Anmerkninger... 6 Karakterer...
H Laplacetransformasjon, transientanalyse og Z- transformasjon
 FYS30 H013-1 Laplacetranformajon, tranientanalye og Z- tranformajon... 1 801 Paivt Chebyhevfilter (H00-4)... 80 Aktivt Butterworth & Beel filter (H03-1)... 3 807 Fra 1-orden prototype Beel filter til båndpa...
FYS30 H013-1 Laplacetranformajon, tranientanalye og Z- tranformajon... 1 801 Paivt Chebyhevfilter (H00-4)... 80 Aktivt Butterworth & Beel filter (H03-1)... 3 807 Fra 1-orden prototype Beel filter til båndpa...
Kap 01 Enheter, fysiske størrelser og vektorer
 Kap Enheter, fyike tørreler og vektorer.7 Concorde er det rakete paajerflyet. Det har en hatighet på 45 mi/h (ca ganger lyden hatighet, dv Mach). mi = 69 m. a) Hva er Concorde-flyet hatighet i km/h? b)
Kap Enheter, fyike tørreler og vektorer.7 Concorde er det rakete paajerflyet. Det har en hatighet på 45 mi/h (ca ganger lyden hatighet, dv Mach). mi = 69 m. a) Hva er Concorde-flyet hatighet i km/h? b)
IP-telefoni Brukerveiledning
 IP-telefoni Brukerveiledning Oppdatert august 2009 1 IP-telefoni fra Altibox - ett av markedets mest moderne 2 Kobling av analoge telefoner til hjemmesentralen 3 Telefonitjenester 3 1 IP-telefoni * fra
IP-telefoni Brukerveiledning Oppdatert august 2009 1 IP-telefoni fra Altibox - ett av markedets mest moderne 2 Kobling av analoge telefoner til hjemmesentralen 3 Telefonitjenester 3 1 IP-telefoni * fra
TRANSISTOR SOM BRYTER anvendt i enkle logiske CMOS
 el : Grunnleggene igitl CMO. Innhol. 2. Trnitor om ryter. Kpittel.3 ie 8. 3. CMO inverter. Kpittel.4. ie 9. 4. NN port. Kpittel.4.2 ie 9. 5. Komintorik logikk. Kpittel.4.3 ie 9 -. 6. NOR port. Kpittel.4.4
el : Grunnleggene igitl CMO. Innhol. 2. Trnitor om ryter. Kpittel.3 ie 8. 3. CMO inverter. Kpittel.4. ie 9. 4. NN port. Kpittel.4.2 ie 9. 5. Komintorik logikk. Kpittel.4.3 ie 9 -. 6. NOR port. Kpittel.4.4
IP-telefoni Brukerveiledning
 FASETT JUNI 2008 IP-telefoni Brukerveiledning Altibox er en fiberløsning tilpasset morgendagens muligheter. I en og samme fiberkabel får du raske internettlinjer, et variert tv- og filmtilbud pluss sikker
FASETT JUNI 2008 IP-telefoni Brukerveiledning Altibox er en fiberløsning tilpasset morgendagens muligheter. I en og samme fiberkabel får du raske internettlinjer, et variert tv- og filmtilbud pluss sikker