Reguleringsteknikk vha.
|
|
|
- Einar Bråten
- 6 år siden
- Visninger:
Transkript

1 University College of Southeast Norway Reguleringsteknikk vha. Hans-Petter Halvorsen, MathScript
2 Innholdsfortegnelse Innholdsfortegnelse... ii MathScript... 6 Innledning... 6 Plotting... 7 Tips & Triks... 8 Reguleringsteknikk Regulator PID Algoritme Eksempel I/O (DAQ) enhet Transferfunksjoner MathScript Differensiallikninger Sprangrespons Sluttverditeoremet ordens systemer Sprangrespons MathScript ordens system med tidsforsinkelse MathScript ordens systemer Response Time MathScript ii
3 iii Sprangrespons og stabilitet Poler Spesialtilfelle Blokkdiagrammer Serie Parallell Tilbakekobling (Feedback) Tilstandsrommodeller MathScript Tidsforsinkelse/Pade Appr Pade Approksimasjon MathScript Metode Metode Metode Stabilitetsanalyse Impulsrespons Asymptotisk stabilt system Marginalt stabilt system Ustabilt system MathScript Poler Asymptotisk stabilt system Marginalt stabilt system Ustabilt system MathScript... 44
4 iv Tilbakekoblede systemer Sløyfetransferfunksjonen Følgeforholdet Sensitivitetsfunksjonen/Avviksforholdet MathScript Frekvensrespons Bodediagram MathScript Hvordan finne frekvensresponsen fra transferfunksjonen Knekkfrekvenser MathScript Hvordan finne frekvensresponsen fra sinuskurver på inngangen og utgangen? Frekvensrespons for standardfunksjoner Filtere Lavpassfilter Høypassfilter Båndstopp Båndpass MathScript Definisjoner Periode T Amplitude - A Frekvens - f Frekvensresponsanalyse Innledning Følgeegenskaper... 66
5 v Båndbredde MathScript Stabilitetsanalyse i Frekvensplanet Stabilitetsmarginer Stabilitetsanalyse MathScript MathScript-funksjoner... 76


6 MathScript Innledning MathScript er en tilleggspakke til LabVIEW. Syntaksen er identisk som MATLAB. MathScript er velegnet ifm. design, analyse og simulering av reguleringssystemer da det finnes mange innebygde funksjoner for dette. Vi åpner MathScript fra menyen i LabVIEW: Tools MathScript Window 6
7 7 MathScript Exempel: Gitt følgende funksjon: Vi ønsker å finne y 2 Først må vi definere x: x = 2 Deretter kan vi definere funksjonen: y = 3*x + 2 MathScript gir da følgende svar: y = 8 y x = 3x + 2 Merk! Maple kan utføre symbolsk matematikk, mens MathScript (og VB/C#) er et numerisk verktøy. Dette betyr at du alltid må definere verdier for variablene dine før du bruker dem i et matematisk uttrykk. Merk! Syntaksen i MathScript er lik syntaksen i VB/C#, men MathScript er mye enklere på den måten at du ikke trenger å deklarere variablene og bestemme en datatype før du bruker dem. Dette blir automatisk håndtert at kompilatoren. Plotting MATLAB er veldig anvendelig til å plotte verdier, funksjoner, m.m. Eksempel: Vi ønsker å plotte følgende uttrykk vha. MathScript: Vi bruker da plot() funksjonen i MathScript. x = 0:5; y = 3*x + 2; plot(x,y) y x = 3x + 2 I eksemplet over har vi plottet funksjonen i intervallet [0, 5]. Resultatet blir da som følger:
8 8 MathScript Følgene funksjoner blir brukt mye ifm plotting:. Function Description Example plot >X = [0:0.01:1]; >Y = X.*X; >plot(x, Y) Generates a plot. plot(y) plots the columns of y against the indexes of the columns. figure Create a new figure window >>figure subplot grid axis title xlabel ylabel legend hold Create subplots in a Figure. subplot(m,n,p) or subplot(mnp), breaks the Figure window into an m-by-n matrix of small axes, selects the p-th axes for the current plot. The axes are counted along the top row of the Figure window, then the second row, etc. Creates grid lines in a plot. grid on adds major grid lines to the current plot. grid off removes major and minor grid lines from the current plot. Control axis scaling and appearance. axis([xmin xmax ymin ymax]) sets the limits for the x- and y-axis of the current axes. Add title to current plot title('string') Add xlabel to current plot xlabel('string') Add ylabel to current plot ylabel('string') Creates a legend in the corner (or at a specified position) of the plot Freezes the current plot, so that additional plots can be overlaid >>figure(1) >>subplot(2,2,1) >>grid >>grid on >>grid off >>axis([xmin xmax ymin ymax]) >>axis off >>axis on >>title('this is a title') >> xlabel('time') >> ylabel('temperature') >> legend('temperature') >>hold on >>hold off Tips & Triks
9 9 MathScript Bruk Script window ikke Command window. Du kan bruke Command window til enkle ting, for eksempel til help <function>. I Script window kan du lagre koden i såkalte.m filer. I Command window kan du bare skrive en og en kommando av gangen, mens i Script window kan du skrive flere kommandoer adskilt med linjeskift. Kommentarer - % % Dette er en kommentar x=2; y=3*x Bruk kommentarer aktivt for å øke lesbarheten i programmet ditt! Desimaltegn: Bruk punktum ikke komma! Dvs. y=3.2 ikke y=3,2 Ikke bruk mellomrom (space) i filnavn eller navn på funksjoner! Bruk piltaster (Pil opp og Pil Ned) for å bla i tidligere brukte kommandoer i Command Window En grei regel: En oppgave en fil, dvs. ikke putt alle oppgavene i en fil!! Funksjoner: - Kun en funksjon i hver fil! - Filnavnet (.m) og navnet på funksjonen må være det samme! Bruk semikolon ; etter kommandoer/funksjoner hvis du ikke trenger å vise svaret på skjermen a=2; b=4; y=a+b Bruk engelske navn på variable, funksjoner, filer, m.m. Dette er vanlig praksis i programmering!
10 10 MathScript Bruk alltid variable - ikke sett inn tall direkte i uttrykkene a=2; b=4; y=a+b Ikke: y=2+4 Bruk hjelp for å finne ut mer om de funksjonene du skal bruke For å få hjelp om tf funksjonen skriver du følgende i Command window: help tf I toppen av Scriptet ditt, legg alltid til følgende kommandoer: clear clc close all Dette sørger for at du ikke får problemer med gamle variable, m.m. Greske bokstaver: I matematikken og i reguleringsteknikk er det vanlige å bruke greske Bokstaver i formler, m.m. Disse kan ikke brukes direkte i MathScript, så finn på gode variabelnavn for disse. Eksempler: ω - w0 ζ zeta eller eventuelt bare z osv. Matematiske uttrykk: Bruk følgende i MathScript: x / x ln(x) log (x) x^2 sqrt(x) log(x) Log10(x)
11 11 MathScript e 9 π exp(x) pi Eksempel: Anta følgende matematiske funksjon: z = 3x / + x / + y / <= (9) + e Hvor z er en funksjon av x og y, dvs. z(x, y). Vi ønsker å bruke MathScript til å finne z(2,2). MathScript koden blir som følger: x = 2; y = 2; z = 3*x^2 + sqrt(x^2 + y^2)+ exp(log(x)) MathScript gir følgende svar: z = Merk! Vi må alltid definere verdier for variablene (x og y) før vi bruker dem i et uttrykk.
12 Reguleringsteknikk Reguleringsteknikk beskriver hvordan man kan regulere og stabilisere et dynamisk system. Et dynamisk system kan reguleres eller styres på flere måter. Et system som involverer en person som styrer en maskin, f.eks. en person som kjører bil, kalles manuell styring. Regulering av vannivå i en tank, regulering av temperatur, eller regulering av gjennomstrømning, regulering av trykk, fart, osv. Det er ubegrenset hva du kan regulere, og alle disse kan bli regulert på samme måte; med en regulator. Regulator Oppgaven til en regulator er å endre pådraget i forhold til måleverdien fra prosessen, det gjør den med noen parameterer som kalles P, I og D (PID regulator). Disse variablene varierer fra prosess til prosess. Formålet til disse variablene er å skape den optimale reguleringsalgoritmen til en viss prosess, for å få en mest mulig stabil reguleringen, dvs at utgangen y følger referansen r best mulig. 12
13 13 Reguleringsteknikk PID Algoritme En PID regulator er gitt ved: u(t) = K B e + K B T D H edτ + K B T G e - Der e er avviket mellom referansen r og utgangen y (e = r y), mens u er pådraget. P-ledd (Proporsjonal): u J (t) = K B e Der K B er (proporsjonal) forsterkningen I-ledd (Integral): u K (t) = K B T D H edτ - Der T D er integraltiden I-leddet sørger for at regulatoren gir null avvik (stasjonært) (Statisk ytelse) D-ledd (Deriverte): u L (t) = K B T G e Der T G er derivattiden D-leddet sørger for at regulatoren reagerer raskt (Dynamisk ytelse) Eksempel Nedenfor ser vi reguleringssystemet for en vanntank. Formålet er å regulere nivået i tanken (h) på et gitt nivå (referanseverdien). Dette gjøres i dette tilfellet ved en PID regulator som styrer en pumpe på tankens innløp.
 enhet. En del av DAQ enhets oppgave vil da være å konvertere mellom analoge og digitale signaler.")
14 14 Reguleringsteknikk I/O (DAQ) enhet Vanligvis blir regulatoren implementert i software, dvs. vha. en datamaskin eller liknende, mens prosessen er en fysisk enhet (f.eks. en vanntank eller likende). Vi må da sende signaler mellom regulatoren og prosessen. Får å få til dette må vi bruke en DAQ (I/O) enhet. En del av DAQ enhets oppgave vil da være å konvertere mellom analoge og digitale signaler. Et eksempel på en DAQ enhet kan være NI USB-6008:

15 15 Reguleringsteknikk Denne har 8 analoge innganger og 2 analoge utganger, i tillegg til 12 analoge inn/utganger. Denne blir brukt i mange fag ved Høgskolen i Telemark.
16 Transferfunksjoner Transferfunksjoner er nyttige å bruk ved analyse og design av dynamiske systemer. Transferfunksjoner er modeller basert på Laplace-transformasjonen. Transferfunksjonen gir altså en modellbeskrivelse i s-planet (der s er Laplace-operatoren). En transferfunksjon kan skrives på følgende generelle form: H S = y(s) u(s) Hvor y(s) er utgangen mens u(s) er inngangen. Transferfunksjonen er altså forholdet mellom inngangen og utgangen når alle andre inngangsvariable, samt alle initialbetingelser er satt lik null. Merk! Transferfunksjoner gjelder bare for lineære systemer. En transferfunksjon kan skrives på følgende generelle polynomform: H s = b Rs R + b RST s RST + + b T s + b - a W s W + a WST s WST + + a T s + a - Der telleren til transferfunksjonen beskriver nullpunktene til systemet, mens nevneren beskriver polene til systemet. MathScript I MathScript definerer vi transferfunksjoner vha. den innebygde tf funksjonen: num=[bm, bm_1, bm_2,, b1, b0]; den=[an, an_1, an_2,, a1, a0]; H = tf(num, den) Eksempel: 1. Gitt følgende transferfunksjon: H(s) = 2s/ + 3s + 4 5s
17 17 Transferfunksjoner MathScript kode: num=[2, 3, 4]; den=[5, 9]; H = tf(num, den) 2. Gitt følgende transferfunksjon: H(s) = 4sZ + 3s + 4 5s / + 9 Merk! Hvis noen ledd mangler, setter vi disse lik 0. Transferfunksjonen kan bli omskrevet som: MathScript kode: num=[4, 0, 0, 3, 4]; den=[5, 0, 9]; H = tf(num, den) H(s) = 4sZ + 0 s \ + 0 s / + 3s + 4 5s / + 0 s Gitt følgende transferfunksjon: H(s) = 7 + 3s + 2s/ 5s + 6s / Merk! Hvis noen ledd mangler, setter vi disse lik 0, samt passer på at de kommer i riktig rekkefølge. Transferfunksjonen kan bli omskrevet som: MathScript kode: num=[2, 3, 7]; den=[6, 5, 0]; H = tf(num, den) [Slutt på eksempel] H(s) = 2s/ + 3s + 7 6s / + 5s Differensiallikninger
18 18 Transferfunksjoner Vi kan si at transferfunksjonen gir en ekstern inn-ut representasjon av et system. Differensiallikningene derimot gir en intern representasjon av systemet fordi differensiallikningene beskriver systemets indre liv. Vi kan finne transferfunksjonen fra differensiallikningen(e) vha. Laplace transformasjon. Vi har følgende Transformasjonspar: Derivasjon: Integrasjon: x sx(s) x 1 s x(s) Tidsforsinkelse: u t τ u(s)e Sab Eksempel: Gitt følgende differensiallikning: Vi ønsker å finne transferfunksjonen: Laplace gir: Videre: Videre: Videre: x = 0.5x + 2u H s = x(s) u(s) sx(s) = 0.5x(s) + 2u(s) sx s + 0.5x(s) = 2u(s) x s (s + 0.5) = 2u(s) x s u(s) = 2 s = 4 2s + 1
19 19 Transferfunksjoner Dette gir: [Slutt på eksempel] H s = x s u(s) = 4 2s + 1 Eksempel: Gitt følgende differensiallikning (med tidsforsinkelse): x = 1 T x + Ku(t τ) Vi ønsker å finne transferfunksjonen: H s = x(s) u(s) Laplace gir: sx(s) = 1 T x(s) + K T u(s)esab Videre: Tsx s + x s = Ku(s)e Sab Videre: x s Ts + 1 = Ku(s)e Sab Videre: x s u(s) = K Ts + 1 esab Som gir: H s = x s u(s) = K Ts + 1 esab [Slutt på eksempel] Motsatt kan vi finne differensiallikningen(e) fra transferfunksjonen. Eksempel: Gitt følgende transferfunksjon:
20 20 Transferfunksjoner Vi ønsker å finne differensiallikningen. Vi gjør følgende: H s = x(s) u(s) = 3 0.5s + 1 x(s) 0.5s + 1 = 3u(s) Videre: 0.5sx s + x(s) = 3u(s) Inverse Laplace: 0.5x + x = 3u Dette gir følgende differensiallikning: x = 2x + 6u [Slutt på eksempel] Sprangrespons Vi ønsker ofte å finne et systems sprangrespons, dvs. systemet dynamiske oppførsel over tid etter et sprang i pådraget. For en gitt transfer funksjon: Får vi: H s = y(s) u(s) y s = H s u(s) der vi vanligvis bruker et enhetssprang på inngangen, i dette tilfellet pådraget u, dvs pådraget u øker fra 0 til 1 ved t = 0.
21 21 Transferfunksjoner Dvs. vi ønsker å plotte y(t) etter et sprang på inngangen. Nedenfor ser vi et typisk eksempel: [Figure: F. Haugen, Advanced Dynamics and Control: TechTeach, 2010] For et enhetsprang har vi følgende Laplacetransformasjon: 1 s 1 For et sprang med størrelse k (amplitude k) har vi følgende Laplacetransformasjon: k s k Vi finner dermed sprangresponsen for et gitt system på følgende måte: Gitt Transfer funksjonen: H s = y(s) u(s) 1. Vi ordner det slik at utgangen står på høyre side: y s = H s u(s) 2. Deretter finner vi inngangsvariabelens transformasjonspar og setter denne inn i uttrykket.
22 22 Transferfunksjoner For et sprang med størrelse k (amplitude k) får vi da følgende: Dvs.: u s = k s y s = H s k s 3. Tilslutt tidsresponsen ved å ta inverse laplace av uttrykket over. Eksempel: Gitt følgende system: Vi får da: Hvor u er et enhetssprang: H = y(s) u(s) = 3 2s + 1 y s = H s u(s) Dvs.: u s = 1 s y s = 3 2s s = 3 2s + 1 s Vi broker følgende Laplace-transformasjonspar (som vi finner i en tabell): Vi får da: MathScript: K Ts + 1 s K(1 esh/g ) y t = 3(1 e SH// ) Vi kan da plotte denne sprangresponsen vha. MathScript: t=0:0.1:20; y = 3*(1-exp(-t/2));
23 23 Transferfunksjoner plot(t,y) Som gir følgende sprangrespons: Vi ser også at den stasjonære verdien i dette tilfellet er y b = 3. Den stasjonære verdien er den verdien vi får når t. Dette er jo litt tungvint siden vi må gjøre en del manuelle beregninger, men vha. MathScript kan vi gjøre det mye enklere: num=[3]; den=[2, 1]; H = tf(num, den); step(h, t) Dvs. vi kan definere transfer funksjonen (vha. tf funksjonen) direkte i MathScript og bruke den innebygde step funksjonen til å beregne og eller plotte sprangresponsen. Resultatet blir det samme. [Slutt på eksempel] Sluttverditeoremet I mange tilfeller er det den stasjonære responstiden man er interessert i, det vil si tidsresponsen når t.
24 24 Transferfunksjoner Da kan vi bruke sluttverditeoremet: y b = lim H l y t = lim b - s y(s) Eksempel: Gitt følgende system: Vi får: H = y(s) u(s) = 3 2s + 1 y b = lim H l y t = lim b - s y s = lim b - s Som du ser får vi samme resultat som vi fikk i forrige eksempel. [Slutt på eksempel] 3 2s + 1 s = = 3
25 1.ordens systemer 1.ordens transferfunksjon: K er forsterkning T er tidskonstant H s = K Ts + 1 Sprangrespons For et 1.ordens system har vi: Vi får da: Hvor: H = y(s) u(s) = K Ts + 1 y s = H s u(s) Dvs.: y s = u s = U s K Ts + 1 U s Vi broker følgende Laplace-transformasjonspar (som vi finner i en tabell): Tilslutt får vi da følgende: K Ts + 1 s K(1 esh/g ) y t = KU(1 e SH/g ) 25

![1]; H = tf(num, den) Sprangrespons: y s = H s u(s) H](/docs-images/72/67731330/images/26-2.jpg "s = K Ts + 1 Vanligvis: er U = 1, dvs en")
26 26 Transferfunksjoner MathScript Eksempel: K = 1, T = 2 MathScript: K = 1; T = 2; num = [K]; den = [T, 1]; H = tf(num, den) Sprangrespons: y s = H s u(s) H s = K Ts + 1 Vanligvis: er U = 1, dvs en enhetssprang
27 27 Transferfunksjoner Mathscript: step(h) 1.ordens system med tidsforsinkelse En 1.ordens transferfunksjon med tidsforsinkelse: H s = K Ts + 1 esab En sprangrespons for en slik transferfunksjon har følgende karakteristikk: [Figure: F. Haugen, Advanced Dynamics and Control: TechTeach, 2010] Fra sprangresponsen kan vi enkelt finne K, T and τ. MathScript Eksempel: K = 1, T = 2, τ = 3 H s = K Ts + 1 esab MathScript: K = 1; T = 2; delay=3; H = sys_order1(k, T, delay) step(h)
28 28 Transferfunksjoner Dette gir følgende plot:
29 2.ordens systemer 2.ordens transferfunksjon: K H s = as / + bs + c = Kω - s / / + 2ζω - + ω = - K er forsterkning ζ (zeta) er relativ dempingsfaktor ω - [rad/s] er udempet resonansfrekvens / s ω - K / s + 2ζ + 1 ω - Response Time The response time for a 2.order system is approximately: T o 1.5 ω - MathScript Eksempel: Dvs: K = 1, ω - = 1, ζ = 1 MathScript kode: K = 1; w0 = 1; zeta = 1; a = 1/w0^2; b = 2*zeta/w0; c = 1; H s = 1 s / + s
30 30 2.ordens systemer num = [K]; den = [a,b,c] H = tf(num,den) Sprangrespons: step(h) Sprangrespons og stabilitet Verdien på ζ er avgjørende for systems sprangrespons og stabilitetsegenskaper: [Figure: F. Haugen, Advanced Dynamics and Control: TechTeach, 2010] Poler Systemets stabilitetsegenskaper er definert av polens plassering i det komplekse plan. Gitt følgende generelle 2.ordens system:
31 31 2.ordens systemer H s = Polene finner vi ved å sette nevneren lik null: Dvs. vi har en standard 2.ordens likning: Løsningen på denne er som kjent: K as / + bs + c as / + bs + c = 0 ax / + bx + c = 0 x = b ± b/ 4ac 2a Spesialtilfelle Når polene er reelle og forskjellige (ζ > 0) har vi følgende viktige spesialtilfelle: H s = Kp T p / (s p T )(s p / ) = K (T T s + 1)(T / s + 1) Der p T og p / er systemets poler og T T og T / er systemets tidskonstanter. Dette kan sees på som to 1.ordens systemer i serie: H s = H T s H T s = K (T T s + 1) 1 (T / s + 1) = K (T T s + 1)(T / s + 1)
32 Blokkdiagrammer Et reguleringssystem består av ulike blokker (transferfunksjoner), disse er enten koblet i serie eller i parallell. I reguleringssystemer er det også vanlig å bruke tilbakekoblinger i form av at regulatoren bruker målingen til å beregne pådragssignalet. Serie Seriekobling: MathScript: I MathScript kan vi bruke series funksjonen: H = series(h1,h2) Hvis vi har mer enn 2 kan vi gjøre følgende: H = series(h1,series(h2,h3)) Parallell Parallellkobling: 32
33 33 Blokkdiagrammer MathScript: I MathScript kan vi bruke parallel funksjonen: H = parallel(h1,h2) Hvis vi har mer enn 2 kan vi gjøre følgende: H = parallel(h1, parallel(h2,h3)) Tilbakekobling (Feedback) Negativ tilbakekobling: MathScript: I MathScript kan vi bruke feedback funksjonen: H = feedback(h1,h2)
34 Tilstandsrommodeller En tilstandsrommodell er en strukturert måte å representere et sett med differensiallikninger på. Tilstandsmodell er veldig nyttige i forbindelse med reguleringsteori. Differensiallikningene blir satt på matrise-vektor form, som jo er basis-elementene i MathScript. Anta følgende differensiallikninger: x T = a TT x T + a /T x / + + a WT x W + b TT u T + b /T u / + + b WT u W x W = a TR x T + a /R x / + + a WR x W + b TR u T + b /R u / + + b WT u W Disse kan skrives på følgende generelle form (tilstandsrommodell): x T x / x W 9 = a TT a WT a TR a WR v x T x / x W 9 + b TT b WT b TR b WR w u T u / u W x y T y / y W y = c TT c WT c TR c WR z x T x / x W 9 + d TT d WT d TR d WR L u T u / u W x Eller på følgende enkle form: x = Ax + Bu y = Cx + Du Der x systemets interne tilstander, u pådrag, y - måling Eksempel: Gitt følgende differensiallikninger: x T = x T + 2x T 34
35 35 Blokkdiagrammer x T = 3x T + 4x T + u Dette gir: y = x T x T x / = v x T x / w u y = 1 0 z x T x / Merk! D matrisa er lik null i dette tilfellet, så dermed tar vi ikke med den. MathScript I MathScript gjør vi følgende: A = [1 2; 3 4]; B = [0; 1]; C = [1, 0]; D = [0]; model = ss(a, B, C, D) Sprangrespons: step(model)
36 Tidsforsinkelse/Pade Appr. Eksempler på dødtid/tidsforsinkelser i prosess -sammenheng: Transportbånd Rør, f.eks Luftrør Transferfunskjon for tidsforsinkelse/dødtid: H s = y(s) u(s) = esab Transferfunksjonen e Sab er såkalt ikke-rasjonal, dvs. den har ikke teller og nevnerpolynom med potenser av s. Ulike metoder for analyse og design av reguleringssystemer krever at systemet er en rasjonal transferfunksjon Tidsplan: y(t) = u(t τ) Pade Approksimasjon Følgende approksimasjon brukes: Hvor n er approksimasjonens orden. k T, k /, er konstanter e Sab 1 k Ts + k / s / + ± k W s W 1 + k T s + k / s / + + k W s W Jo høyere orden, jo bedre tilnærming til virkeligheten, men ulempen er at transferfunksjonen blir veldig kompleks! Så en gylden middelvei må velges For 1.ordens og 2.ordens approksimasjoner er disse konstantene gitt ved: 36
37 37 Tidsforsinkelse/Pade Appr. 1.ordens Pade approksimasjon: Hvor e Sab 1 k Ts 1 + k T s k T = τ 2 2.ordens Pade approksimasjon: Hvor: e Sab 1 k Ts + k / s / 1 + k T s + k / s / k T = τ 2 MathScript Implementering av dødtid/tidsforsinkelse. k / = τ/ 12 Eksempel: Dvs. tidsforsinkelsen er på 3 sekunder. Sprangrespons: H s = e S\b I dette eksemplet viser vi ulike måter å implementere tidsforsinkelse på. For en tidsforsinkelse på 3 sekunder får vi følgende sprangrespons:
 step(h) Metode 2 Vi bruker den innebygde pade funksjonen Eksempel på")
38 38 Tidsforsinkelse/Pade Appr. Metode 1 Vi bruker den innebygde funksjonen sys_order1 K = 1; T = 0; delay = 3 H = sys_order1(k,t,delay) step(h) Metode 2 Vi bruker den innebygde pade funksjonen Eksempel på en 2.ordens approksimasjon: delay = 3; order = 2; H = pade(delay,order) step(h) Nedenfor ser vi sprangresponsen til en 5.ordens approksimasjon:
39 39 Tidsforsinkelse/Pade Appr. Metode 3 Vi bruker uttrykkene for Pade appr. og bruker tf funksjonen Eksempel på en 1.ordens approksimasjon: k1 = delay/2; num = [-k1, 1]; den = [k1, 1]; H = tf(num,den) step(h) e Sab 1 k Ts 1 + k T s Det er slik den innebygde funksjonen pade er laget! Merk! Pass på rekkefølgen på koeffisientene i telleren og nevneren (høyeste orden til venstre og deretter i synkende rekkefølge)! e Sab 1 k Ts 1 + k T s = k Ts + 1 k T s + 1
40 Stabilitetsanalyse 3 typer systemer (stabilitetsegenskaper): Asymptotisk stabilt system Marginalt stabilt system Ustabilt system Metoder for å finne stabilitetsegenskapene: Impulsrespons Polplassering Impulsrespons Vi kan definere et systems stabilitetsegenskaper utfra impulsresponsen [F. Haugen, Advanced Dynamics and Control: TechTeach, 2010]: Asymptotisk stabilt system Impulsrespons: Stasjonær Impulsrespons: lim h t = 0 H l 40
41 41 Stabilitetsanalyse Marginalt stabilt system Impulsrespons: Stasjonær Impulsrespons: 0 < lim H l h t < Ustabilt system Impulsrespons: Stasjonær Impulsrespons: lim h t = H l MathScript Eksempel: H s = 1 2s + 1 Impulsrespons: K=1; T=2; num = [K]; den = [T, 1]; H = tf(num, den) impulse(h) Dette gir følgende impulsrespons:
42 42 Stabilitetsanalyse Asymptotisk stabilt system
43 43 Stabilitetsanalyse Poler Det kan være upraktisk å måtte jobbe med impulsresponser ved stabilitetsundersøkelser, så en bedre metode vil være å bruke systemets poler. Polene til et gitt system finnes fra nevnerpolynomet i transferfunksjonen. Det komplekse plan: [Figure: F. Haugen, Advanced Dynamics and Control: TechTeach, 2010] Asymptotisk stabilt system Alle polene ligger i venstre halvplan (negativ realdel). Ingen poler på den imaginære akse. Marginalt stabilt system En eller flere poler ligger på den imaginære akse (har realdelen lik 0), og alle polene er forskjellige/ikke sammenfallende. Dessuten, ingen poler i høyre halvplan
44 44 Stabilitetsanalyse Ustabilt system En eller flere poler ligger i høyre halvplan (har realdel større enn 0). Eller: Det er multiple/sammenfallende poler på den imaginære akse. F.eks: Dobbeltintegrator H = T b MathScript Eksempel: Poler: K=1; T=2; num = [K]; den = [T, 1]; H = tf(num, den) P = poles(h) pzgraph(h) p = 0.5 Asymptotisk stabilt system H s = 1 2s + 1
45 45 Stabilitetsanalyse Tilbakekoblede systemer Skisse av et tilbakekoblet system: Hver av disse kan beskrives vha. en transfer funksjon: Sløyfetransferfunksjonen (Engelsk: Loop transfer function ) L s = H ƒ H J H Følgeforholdet (Engelsk: Tracking transfer function ) T s = y(s) r(s) = H ƒh J H 1 + H ƒ H J H = L(s) 1 + L(s)
46 46 Stabilitetsanalyse Denne uttrykker hvor godt systemet følger referansen. Systemet har gode følgeegenskaper hvis y r, dvs.: T 1 Sensitivitetsfunksjonen/Avviksforholdet (Engelsk: Sensitivity transfer function ) S s = e(s) r(s) = L(s) = 1 T(s) Denne uttrykker hvor sensitivt avviket er overfor referansen og denne bør derfor være liten, dvs: Merk! og MathScript S 0 or S 1 S s = 1 T s T s = 1 S(s) T s + S s = L(s) 1 + L(s) L(s) 1 Eksempel: Sløyfetransferfunksjonen: L = series(hr, Hpm) Hvis flere enn 2: M=series(H1, series(h2, H3))
47 47 Stabilitetsanalyse Følgeforholdet: T = feedback(l, 1) Sensitivitetsfunksjonen/Avviksforholdet S = 1-T
48 Frekvensrespons Et systems frekvensrespons uttrykker hvordan sinussignaler på systemets inngang endres gjennom systemet. Som vi ser av figuren under så vil både amplituden forandres, samt at signalet blir faseforskyvet. [Figure: F. Haugen, Advanced Dynamics and Control: TechTeach, 2010] Frekvensresponsen forteller hvilken amplitudeforsterkning og faseforskyvning den enkelte frekvenskomponent får gjennom systemet. Frekvensresponsen til et system er definert som steady-state responsen til systemet hvor inngangssignalet er et sinus signal. I steady-state vil utgangssignalet være forskjellig mtp amplitude/forsterkning (A) samt være faseforskyvet (φ). Vi kan definer inngangssignalet som: u t = U sinωt 48
49 49 Frekvensrespons Utgangssignalet i steady-state vil da være: y t = UA sin (ωt + φ) er forholdet mellom utgangssignalets og inngangssignalets amplitude (i steady- Hvor A = Œ state). A og φ er funksjoner av frekvensen ω, så vi kan skrive A = A ω, φ = φ(ω) A ω - Amplitudefunksjonen φ(ω) Fasefunksjonen Bodediagram Frekvensresponsen kan presenteres grafisk i et Bodediagram. Bodediagrammet består av 2 deler: Et Amplitudediagram (Forsterkning [db] som funksjon av frekvens [ω]) Et Fasediagram (Faseforskyvning [grader] som funksjon av frekvens [ω]) Merk! Frekvensaksen er logaritmisk med 10-logaritmen for frekvensen som enhet Vanligvis er enheten for frekvens Hertz [Hz], mens i frekvensrespons brukes radianer ω [rad]. Sammenhengen mellom disse er: ω = 2πf
50 50 Frekvensrespons MathScript I MathScript kan vi enkelt tegne Bodediagrammer vha den innebygde funksjonen bode. Eksempel: Gitt transferfunksjon: MathScript koden blir som følger: K=1; T=1; num=[k]; den=[t, 1]; H = tf(num, den) bode(h); H s = y(s) u(s) = 1 s + 1 Det er ønskelig å ha grid på plottet: subplot(2,1,1) grid subplot(2,1,2) grid Bode-diagrammet blir som følger:
51 51 Frekvensrespons [Slutt på eksempel] Hvordan finne frekvensresponsen fra transferfunksjonen For en generell transferfunksjon: Har vi følgende (setter s = jω): H S = y(s) u(s) H jω = H(jω) e ( ) Hvor H(jω) er frekvensresponsen til systemet, dvs. Vi finner frekvensresponsen ved å sette s = jω i transferfunksjonen. Dette kan illustreres i det komplekse planet slik:
52 52 Frekvensrespons Et Bodediagram viser en grafisk presentasjon av frekvensresponsen, og er nyttig ved analyse og design av reguleringssystemet. Bodediagrammet består av 2 forskjellige plot, Amplitudediagram, A(ω) and fasedigram, φ(ω). Amplitudefunksjonen: Fasefunksjonen: A ω = H(jω) φ ω = H(jω) Merk! A(ω)-saksen er i desibel (db), hvor desibelverdien av x beregnes som følger: x db = 20log T- x Merk! φ(ω)-aksen er i grader (ikke i radianer!) Eksempel: Vi finner uttrykkene for A ω [db] og φ(ω) for ulike transferfunksjoner: Transferfunksjon: A(ω) og φ(ω):
53 53 Frekvensrespons H s = y(s) u(s) = 1 s + 1 H s = 4 2s + 1 H(jω) Gw = 20log1 20log (ω) / + 1 H(jω) = arctan (ω) H(jω) Gw = 20log4 20log (2ω) / + 1 H(jω) = arctan (2ω) H S = 5 s + 1 (10s + 1) H(jω) Gw = 20log5 20log (ω) / log (10ω) / + 1 H(jω) = arctan (ω) arctan (10ω) 1 H S = s s + 1 / H s = 3.2eS/b 3s + 1 H S 5s + 1 = 2s + 1 (10s + 1) H(jω) Gw = 20log (ω) / 2x20log (ω) / + 1 = 20logω 40log (ω) / + 1 H(jω) = 90 2 arctan (ω) H(jω) Gw = 20log3.2 20log (3ω) / + 1 H(jω) = 2ω arctan (3ω) H(jω) Gw = 20log (5ω) / log (2ω) / log (10ω) / + 1 H(jω) = arctan (5ω) arctan (2ω) arctan (10ω) Merk! For å finne fasen i grader må vi multiplisere med: T - Fasekurven: Ledd i telleren: +90 grader for hvert ledd (ledd av typen s eller (Ts + 1)) Ledd i nevneren: 90 for hvert ledd (ledd av typen s eller (Ts + 1)) [Slutt på eksempel] Knekkfrekvenser Knekkfrekvensen(e) er der hvor kurven skifter retning, enten oppover eller nedover. Disse kan enkelt finnes fra transferfunksjonen og gir et godt bilde av hvordan kurven vil bli. Eksempel: Her er noen eksempler på knekkfrekvenser for ulike transferfunksjoner: Transferfunksjon: H s = y(s) u(s) = 1 s + 1 Knekkfrekvenser: ω = 1 T = 1 1 = 1
54 54 Frekvensrespons H s = 4 2s + 1 ω = 1 T = 1 2 = 0.5 H S = 5 s + 1 (10s + 1) ω T = 1 T T = 1 1 = 1 ω / = 1 T / = 1 10 = 0.1 H S = 1 s s + 1 / ω = 1 T = 1 1 = 1 H s = 3.2eS/b 3s + 1 ω = 1 T = 1 3 = 0.33 H S = 5s + 1 2s + 1 (10s + 1) ω T = 1 T T = 1 5 = 0.2 ω / = 1 T / = 1 2 = 0.5 ω \ = 1 T \ = 1 10 = 0.1 [Slutt på eksempel] MathScript Selv om MathScript kan finne frekvensresponsen og tegne et Bodediagram direkte fra transferfunksjonen vha. den innebygde funksjonen bode kan det også være av interesse å vite hvordan dette gjøres manuelt, dvs. ta utgangspunkt i de matematiske uttrykkene for A ω og φ(ω). Eksempel: Gitt følgende transferfunksjon H s = y(s) u(s) = 1 s + 1 Matematiske uttrykk for A ω og φ(ω) er gitt ved: MathScript: Vi finner A ω og φ(ω) for ω = 1: H(jω) Gw = 20log1 20log (ω) / + 1 H(jω) = arctan (ω)
55 55 Frekvensrespons w=1; gain = 20*log10(1) - 20*log10(sqrt(w^2+1)) phase = -atan(w); phasedeg = phase * 180/pi %convert to degrees Svaret blir: gain = phasedeg = Hvis vi ønsker å finne A ω og φ(ω) for flere frekvenser kan vi f.eks. bruke en For loop: w = [0.01, 0.1, 1, 10, 100]; N = length(w); for i=1:n gain(i) = 20*log10(1) - 20*log10(sqrt(w(i)^2+1)); phase(i) = -atan(w(i)); phasedeg(i) = phase(i) * 180/pi; %convert to degrees end Alternativt kan vi gjøre det slik: gain = 20*log10(1) - 20*log10(sqrt(w.^2+1)) phase = -atan(w); phasedeg = phase * 180/pi %convert to degrees MathScript er et kraftig verktøy som kan jobbe direkte med vektorer ved å bruke følgende notasjon:.^.*./ Svaret blir i begge tilfellene: ω A ω [db] φ ω (degrees)
![56 Frekvensrespons Disse kan vi plotte: %Gain Plot subplot(2,1,1) semilogx(w, gain) grid %Phase Plot subplot(2,1,2) semilogx(w, phasedeg) grid Som gir: 10-20 -84 100-40 -89 [Slutt på eksempel]](/docs-images/72/67731330/images/56-0.jpg "Hvordan finne frekvensresponsen fra sinuskurver på inngangen og utgangen?")
56 56 Frekvensrespons Disse kan vi plotte: %Gain Plot subplot(2,1,1) semilogx(w, gain) grid %Phase Plot subplot(2,1,2) semilogx(w, phasedeg) grid Som gir: [Slutt på eksempel] Hvordan finne frekvensresponsen fra sinuskurver på inngangen og utgangen? Vi kan finne frekvensresponsen for et gitt system ved å logge inngangs og utgangsdata for forskjellige frekvenser, og utfra dette beregne oss til verdier for A ω og φ(ω) for utvalgte frekvenser.
 Vi vil da få et plot slik som dette for hver frekvens: Forsterkningen er gitt ved: A = Y")
57 57 Frekvensrespons Inngangssignalet er gitt som: u t = U sinωt Steady-state utgangssignalet blir da: y t = UA sin (ωt + φ) (dvs. Det er kun amplituden/forsterkningen som er forskjellig, samt at de er faseforskyvet i forhold til hverandre) Vi vil da få et plot slik som dette for hver frekvens: Forsterkningen er gitt ved: A = Y U Der U er gitt av inngangssignalet, mens Y leses av fra plottet. Faseforskyvningen er gitt ved: φ = ωδt [rad] Der frekvensen ω er gitt av inngangssignalet, mens t leses av fra plottet.
58 58 Frekvensrespons Frekvensrespons for standardfunksjoner Vi vil se nærmere på frekvensresponsen for en del standardfunksjoner. Forsterker Integrator Derivator 1.ordens system 2.ordens system Nullpunkt Tidsforsinkelse Filtere En viktig anvendelse av frekvensrespons er ifm. filtere. Et filter brukes til å fjerne gitte frekvenser eller et intervall med frekvenser fra et signal. En slik anvendelse vil typisk være å fjerne støy fra et signal. Det mest vanlige er Lavpassfilteret. Vi har 4 typer filtere: Lavpassfilter Høypassfilter Båndstoppfilter Båndpassfilter Nedenfor ser vi de ideelle filterkarakteristikkene for disse 4 typene:
59 59 Frekvensrespons Filtrene vil slippe gjennom signaler for de frekvensene hvor amplitudeforsterkningen er 1 på figuren (eller 0dB). For virkelige filtere vil ikke overgangen være så skarpe som på bildet over (ideelle). Lavpassfilter Transferfunksjon for et Lavpassfilter: Der ω er definert som filterets båndbredde. H s = 1 Ts + 1 = 1 1 s + 1 ω Høypassfilter Transferfunksjon for et Høypassfilter: H s = Ts 1 s Ts + 1 = ω 1 s + 1 ω
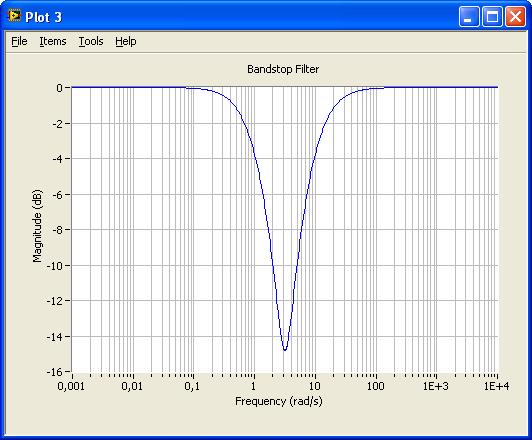
60 60 Frekvensrespons Båndstopp For dette filteret definerer vi en nedre frekvens ω og en øvre frekvens ω. Båndpass For dette filteret definerer vi en nedre frekvens ω og en øvre frekvens ω. MathScript Eksempel: MathScript kode: Lavpassfilter: wl = 1; Tl = 1/wl; num = [1]; den = [Tl, 1]; H_lowpass = tf(num, den) figure(1) bodemag(h_lowpass) grid title('lowpass Filter') Høypassfilter:
![61 Frekvensrespons wh = 10; Th = 1/wh; num = [Th, 0]; den = [Th, 1]; H_highpass = tf(num, den) figure(2) bodemag(h_highpass) grid title('highpass Filter') Båndstoppfilter: Vi parallellkobler et](/docs-images/72/67731330/images/61-0.jpg "Lavpassfilter og et Høypassfilter: H_bandstop = parallel(h_lowpass, H_highpass) figure(3) bodemag(h_bandstop) grid title('bandstop Filter') Båndpassfilter: Vi seriekobler et Lavpassfilter og et")
61 61 Frekvensrespons wh = 10; Th = 1/wh; num = [Th, 0]; den = [Th, 1]; H_highpass = tf(num, den) figure(2) bodemag(h_highpass) grid title('highpass Filter') Båndstoppfilter: Vi parallellkobler et Lavpassfilter og et Høypassfilter: H_bandstop = parallel(h_lowpass, H_highpass) figure(3) bodemag(h_bandstop) grid title('bandstop Filter') Båndpassfilter: Vi seriekobler et Lavpassfilter og et Høypassfilter: H_bandpass = series(h_lowpass, H_highpass) figure(4) bodemag(h_bandpass) grid title('bandpass Filter') Plot:

62 62 Frekvensrespons [Slutt på Eksempel]
63 63 Frekvensrespons Definisjoner Gitt følgende sinuskurve: Periode T Avstanden mellom 2 topper. Amplitude - A Amplitude er avstanden fra en bølges største utslag (toppunkt eller bunnpunkt) til likevektstilstanden (midten). Amplituden er altså en positiv verdi. For sinus- og cosinusbølger er amplituden halvparten av høyden mellom toppunkt og bunnpunkt. Frekvens - f Frekvens er et mål på antallet ganger en hendelse gjentar seg i løpet av en enhetstid. For å beregne frekvens, setter man et fast tidsintervall, teller antall ganger en hendelse inntreffer og dividerer på tidsintervallets lengde. Så lenge hendelsene inntreffer regelmessig er en enkel metode for å beregne frekvens å måle tiden mellom to ganger hendelsen inntreffer (perioden) og så beregne frekvensen f som den inverse av denne tiden:
64 64 Frekvensrespons f = 1 T Vanligvis er enheten for frekvens Hertz [Hz], mens i frekvensrespons brukes radianer ω [rad]. Sammenhengen mellom disse er: ω = 2πf
65 Frekvensresponsanalyse Innledning Skisse av et tilbakekoblet system: Der Regulatoren, Prosessen og Måleinstrumentet er transferfunksjoner: Vi har da følgende: Sløyfetransferfunksjonen (Engelsk: Loop transfer function ): L s = H ƒ H J H 65
66 66 Frekvensresponsanalyse Følgeforholdet (Engelsk: Tracking transfer function ): T s = y(s) r(s) = H ƒh J H 1 + H ƒ H J H = L(s) 1 + L(s) Denne uttrykker hvor godt systemet følger referansen. Systemet har gode følgeegenskaper hvis y r, dvs.: T 1 Sensitivitetsfunksjonen/Avviksforholdet (Engelsk: Sensitivity transfer function ): S s = e(s) r(s) = L(s) = 1 T(s) Denne uttrykker hvor sensitivt avviket er overfor referansen og denne bør derfor være liten, dvs.: Merk! og S 0 eller S 1 S s = 1 T s T s = 1 S(s) T s + S s = L(s) 1 + L(s) L(s) 1 Følgeegenskaper I frekvensplanet har vi: Gode følgeegenskaper: T(jω) 1 eller S(jω) 1 Eller: L(jω) 1 Dårlige følgeegenskaper: T(jω) 1 eller S(jω) 1 Eller:

67 67 Frekvensresponsanalyse Kryssfrekvensen: L(jω) 1 På bakgrunn av dette kan vi definere kryssfrekvensen ω ª : L(jω ª ) = 1 = 0dB Et reguleringssystems følgeegenskaper er gode for frekvenser under kryssfrekvensen, mens de er dårlige for frekvenser over kryssfrekvensen. Båndbredde Når vi plotter L, T og S vil vi typisk få et Bodeplot som dette (Kun amplitudeplottet er interessant i denne sammenhengen): Ut fra dette definerer vi følgende båndbredder: ω c Kryssfrekvensen Frekvensen der sløyfetransferfunksjonen L(jω) har følgende verdi: 1 = 0dB ω t Frekvensen der forsterkningen til Følgefunksjonen T(jω) har følgende verdi:
68 68 Frekvensresponsanalyse = 3dB 2 ω s Frekvensen hvor forsterkningen til sensitivitetsfunksjonen S(jω) har følgende verdi: = 11dB 2
69 69 Frekvensresponsanalyse MathScript Gitt følgende reguleringssystem: Sløyfetransferfunksjonen: L = series(hc, Hp) Hvis flere enn 2: M=series(H1, series(h2, H3)) Følgeforholdet: T = feedback(l, 1) Sensitivitetsfunksjonen/Avviksforholdet: S = 1-T Tilslutt tegner vi disse tre funksjonene i et Bodediagram (kun amplitudeplottet): bodemag(l,t,s) I MathScript vil plottet typisk se slik ut: Ut fra dette plottet kan vi lese av båndbreddene ω c, ω t og ω s.
70 70 Frekvensresponsanalyse I MathScript kan vi enkelt forandre på aksene slik at det blir enklere å lese av verdiene for kurven.
71 Stabilitetsanalyse i Frekvensplanet Et system kan ha en av følgende stabilitetsegenskaper: Asymptotisk stabilt system Marginalt stabilt system Ustabilt system Stabilitetsmarginer Forsterkningsmargin (GM/ΔK) og Fasemarginen (PM/φ) er viktige mtp. analyse av stabilitetsegenskaper for tilbakekoblede systemer. Vi tegner følgende Bodediagram: 71
72 72 Stabilitetsanalyse i Frekvensplanet Ut fra dette definerer vi følgende: Kryssfrekvensen: Kryssfrekvensen ω c : L(jω ª ) = 1 = 0dB Fasekryssfrekvensen ω 180 : L jω T - = 180 µ Forsterkningsmargin: Forsterkningsmargin GM/ΔK: ΔK = T º»¼ Eller: GM db = L jω T - db Forsterkningsmargin (GM/ΔK) sier hvor mye sløyfeforsterkningen kan øke før systemet blir ustabilt. Fasemargin: Fasemarginen PM/φ: PM = 180 µ + L(jω ª ) Fasemarginen (PM/φ) sier hvor mye faseforskyvningen kan reduseres før systemet blir ustabilt. Stabilitetsanalyse Ut fra dette definerer vi følgende stabilitetsegenskaper: Asymptotisk stabilt system: Marginalt stabilt system: Ustabilt system: ω c < ω 180 ω c = ω 180 ω c > ω 180
73 73 Stabilitetsanalyse i Frekvensplanet MathScript I MathScript kan vi lese av ω ª, ω T - ΔK, φ fra Bodediagrammet som vi finner ved å bruke bode funksjonen i MathScript. En annen metode er å bruke funksjonen margin. Eksempel: Slyøfetransferfunkjonen er gitt som følger: Vi setter K B = 0.1 L S = Vi starter med å definere transferfunksjonen: K B s 2s + 1 (5s + 1) Kp = 0.1; Num = [Kp; den1 = [1,0]; den2 = [2,1]; den3 = [5,1]; den = conv(den1, conv(den2,den3)); L = tf(num,den) Deretter finner vi ω ª, ω T - ΔK, φ: margin(l) der L(s) er sløyfetransferfunksjonen. Når vi bruker margin funksjonen på denne måten, får vi et Bodediagram med ω ª, ω T - ΔK, φ ferdig tegnet inn:
![74 Stabilitetsanalyse i Frekvensplanet Vi kan også få tallverdier for ω ª, ω T - ΔK (GM), φ (PM) direkte ved å bruke margin funksjonen slik: [gm, pm, w180, wc] = margin(l) Merk!](/docs-images/72/67731330/images/74-0.jpg "Det er feil i hjelpeteksten som dukker opp når du skriver help margin i Command window i MathScript. Det riktige er rekkefølgen som er illustrert i eksemplet over!")
74 74 Stabilitetsanalyse i Frekvensplanet Vi kan også få tallverdier for ω ª, ω T - ΔK (GM), φ (PM) direkte ved å bruke margin funksjonen slik: [gm, pm, w180, wc] = margin(l) Merk! Det er feil i hjelpeteksten som dukker opp når du skriver help margin i Command window i MathScript. Det riktige er rekkefølgen som er illustrert i eksemplet over! Hvis vi ønsker GM i db gjør vi følgende: gmdb = 20*log10(gm) Dette gir følgende resultat: ω ª = 0.09rad ω T - = 0.3rad ΔK GM = 6.99 eller 16.9dB φ PM = 55 grader Vi ser at ω ª < ω T - Asymptotisk stabilt system Vi kan øke sløyfeforsterkningen med 6.99 før systemet blir ustabilt, dvs. for K B = 0.7 og større vil systemet være ustabilt. Hvor store bør stabilitetsmarginene være?
75 75 Stabilitetsanalyse i Frekvensplanet 2 egenskaper som for et system som stabilitetsmarginene kan gi utrykk for: Innsvingningsforløpet i reguleringssystemets dynamiske responser Reguleringssystemets robusthet overfor visse parameterendringer i sløyfen. Med robusthet menes reguleringssystemets evne til å opprettholde visse egenskaper til tross for parameterendringer. Gylden regel: Stabilitetsmarginene bør ligge i området: 2 (6dB) < ΔK < 4 (12dB) 30grader < φ < 60 grader Så i eksemplet vårt kan K B økes noe, f.eks. K B = 0.2 [Slutt på eksempel]
76 MathScript-funksjoner Her er en kort oversikt over MathScript funksjoner som vi har benyttet. Funksjon Beskrivelse Eksempler atan Beregner arctangens til x >atan(x) bode bodemag conv Lager et Bodediagram for en gitt transferfunksjon. Eller den kan returnere forsterkning og faseforskyvning for gitte frekvenser. Hvis du ikke spesifiserer noen utganger fra funksjonen vil funksjonen tegne et Bodediagram. Nesten same som bode funksjonen, men denne lager kun forsterkningsplottet ikke faseforskyvningsplottet. Kan brukes når du har komplekse transferfunksjoner som du må slå sammen. 76 >num = [4]; >den = [2, 1]; >H = tf(num, den) >bode(h) >[mag, wout] = bodemag(sysin) >[mag, wout] = bodemag(sysin, [wmin wmax]) >[mag, wout] = bodemag(sysin, wlist) >den1 = [1, 2, 3]; >den2 = [3, 4]; >den = conv(c1, C2) feedback Lager transferfunksjonen for et tilbakekoblet system. >T = feedback(h1, H2) log10 Beregner 10 er logaritmen. >log(x) lsim Brukes til å simulere et lineært system. >t = [0:0.1:10] >u = sin(0.1*pi*t)' margin margin pade pid Tegner et Bodediagram med forsterningsmargin og fasemargin tegnet inn. Denne funksjonen kan også beregne kryssfrekvens, fasekryssfrekvensen, forsterkningsmargin og fasemargin Brukes til å finne transferfunksjonen til en Pade aproksimasjon. Brukes til å lage transferfunksjonen til en P, PI, PD eller PID regulator. >lsim(h, u, t) >num = [1] >den = [1, 5, 6] >H = tf(num, den) margin(h) >[gmf, gm, pmf, pm] = margin(h) >[num, den] = pade(delay, order) >[A, B, C, D] = pade(delay, order) >Kc = 0.5; >Ti = 0.25; >H = pid(kc, Ti, 'academic'); plot Brukes til å generere et plot. >x = [0:0.01:1]; >y = sin(x) >plot(x, y) poles Finner polene for en transferfunksjon >num = [1] >den = [1,1] >H = tf(num,den) semilogx Kan brukes til å tegne Bodediagram manuelt basert på de matematiske uttrykkene for A(ω) og φ(ω) >poles(h) >semilogx(w, gain) series Sla sammen 2 eller flere transferfunksjoner som er i serie >H = series(h1,h2) ss Lager en tilstandsrommodell fra A, B, C og D matrisene. >A = [1, 2; 3; 4] >B = [0; 1] >C = [1, 0] ssinfo Brukes til å returnere A, B, C og D matrisene i tilstandsrommodellen. >model = ss(a, B, C) >A = [1, 1; -1, 2] >B = [1, 2]' >C = [2, 1] >D = 0 >model = ss(a, B, C, D) >[A, B, C, D, Ts] = ssinfo(model) step Sprangrespons >num=[1,1]; >den=[1,-1,3]; >H=tf(num,den); >t=[0:0.01:10]; >step(h,t); Sys_order1 Lager en 1.ordens transferfunksjon, med eller uten tidsforsinkelse. >K = 1; >T = 2; >H = sys_order1(k, T) >delay = 3; >H = sys_order1(k, T, delay) Sys_order2 Lager en 2.ordens transferfunksjon. >z = 0.5 >w = 20 >[num, den] = sys_order2(w, z)
77 77 MathScript-funksjoner tf tfinfo Brukes til å lage en transferfunksjon. Kan også brukes til å transformere en tilstandsrommodell til en transferfunksjon. Brukes til å returnere teler, nevner og eventuelt dødtid fra en transferfunksjon. >H = tf(num, den) >[A, B, C, D] = sys_order2(wn, dr) >SysSS = ss(a, B, C, D) >num=[1]; >den=[1, 1, 1]; >H = tf(num, den) >[num, den, delay, Ts] = tfinfo(h) Skriv help <funksjonsnavn> i Command window for å finne ut hvordan den enkelte funksjon virker i detalj.


78 Hans-Petter Halvorsen, M.Sc. Blog: University College of Southeast Norway
Control Engineering. MathScript. Hans-Petter Halvorsen
 Control Engineering MathScript Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie, Parallel,
Control Engineering MathScript Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie, Parallel,
Control Engineering. Stability Analysis. Hans-Petter Halvorsen
 Control Engineering Stability Analysis Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering Stability Analysis Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Reguleringsteknikk med LabVIEW og MathScript eksempler
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Reguleringsteknikk med LabVIEW og MathScript eksempler HANS- PETTER HALVORSEN, 2013.11.08 Faculty
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Reguleringsteknikk med LabVIEW og MathScript eksempler HANS- PETTER HALVORSEN, 2013.11.08 Faculty
Stabilitetsanalyse. Hans- Pe/er Halvorsen, M.Sc.
 Stabilitetsanalyse Hans- Pe/er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial@lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden
Stabilitetsanalyse Hans- Pe/er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial@lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden
MathScript. Hans- Pe1er Halvorsen, M.Sc.
 MathScript Hans- Pe1er Halvorsen, M.Sc. Ja! De1e er et IA fag dvs. både AutomaFsering og InformaFkk! Arbeidslivet krever anvendt kunnskap! Tilstandsrom- modeller Dataverktøy SpesialFlfelle MathScript LabVIEW
MathScript Hans- Pe1er Halvorsen, M.Sc. Ja! De1e er et IA fag dvs. både AutomaFsering og InformaFkk! Arbeidslivet krever anvendt kunnskap! Tilstandsrom- modeller Dataverktøy SpesialFlfelle MathScript LabVIEW
Frequency Response and Stability Analysis
 Control Engineering Frequency Response and Stability Analysis Hans-Petter Halvorsen Dataverktøy Spesialtilfelle MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/
Control Engineering Frequency Response and Stability Analysis Hans-Petter Halvorsen Dataverktøy Spesialtilfelle MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/
Control Engineering. State-space Models. Hans-Petter Halvorsen
 Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Reguleringsteknikk med LabVIEW og MathScript eksempler
 University College of Southeast Norway Reguleringsteknikk med LabVIEW og MathScript eksempler Hans-Petter Halvorsen, 2016.10.26 http://home.hit.no/~hansha Innholdsfortegnelse Innholdsfortegnelse... ii
University College of Southeast Norway Reguleringsteknikk med LabVIEW og MathScript eksempler Hans-Petter Halvorsen, 2016.10.26 http://home.hit.no/~hansha Innholdsfortegnelse Innholdsfortegnelse... ii
Frequency Response and Stability Analysis. Hans- Pe9er Halvorsen, M.Sc.
 Frequency Response and Stability Analysis Hans- Pe9er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy SpesialElfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer
Frequency Response and Stability Analysis Hans- Pe9er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy SpesialElfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer
Kapittel 5. Frekvensrespons. Beregningavfrekvensresponsfrasignaler. Figur 25 viser sammenhørende inngangssignal og utgangssignal for et system.
 Kapittel 5 Frekvensrespons Oppgave5.1 Beregningavfrekvensresponsfrasignaler Figur 25 viser sammenhørende inngangssignal og utgangssignal for et system. Figur 25: Oppgave 5.1: Inngangssignalet u og utgangssignalet
Kapittel 5 Frekvensrespons Oppgave5.1 Beregningavfrekvensresponsfrasignaler Figur 25 viser sammenhørende inngangssignal og utgangssignal for et system. Figur 25: Oppgave 5.1: Inngangssignalet u og utgangssignalet
Systemidentifikasjon Oppgaver
 University College of Southeast Norway Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 4 3 Validering...
University College of Southeast Norway Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 4 3 Validering...
Tilstandsrommodeller. Hans- Pe1er Halvorsen, M.Sc.
 Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner
Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner
1 Tidsdiskret PID-regulering
 Finn Haugen (finn@techteach.no), TechTeach (techteach.no) 16.2.02 1 Tidsdiskret PID-regulering 1.1 Innledning Dette notatet gir en kortfattet beskrivelse av analyse av tidsdiskrete PID-reguleringssystemer.
Finn Haugen (finn@techteach.no), TechTeach (techteach.no) 16.2.02 1 Tidsdiskret PID-regulering 1.1 Innledning Dette notatet gir en kortfattet beskrivelse av analyse av tidsdiskrete PID-reguleringssystemer.
Systemidentifikasjon Oppgaver
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN, 2012.03.16 Faculty of Technology, Postboks
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN, 2012.03.16 Faculty of Technology, Postboks
Simulering i MATLAB og SIMULINK
 Simulering i MATLAB og SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 13. november 2004 1 2 TechTeach Innhold 1 Simulering av differensiallikningsmodeller 7 1.1 Innledning...
Simulering i MATLAB og SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 13. november 2004 1 2 TechTeach Innhold 1 Simulering av differensiallikningsmodeller 7 1.1 Innledning...
Kapittel 6 Stabilitetsanalyse Oppgave 6.1 Stabilitetsegenskap for transferfunksjoner
 Figur 30: Oppgave 5.2: Frekvensresponsen fra T i til T for regulert system Kapittel 6 Stabilitetsanalyse Oppgave 6. Stabilitetsegenskap for transferfunksjoner Bestem stabilitetsegenskapen for følgende
Figur 30: Oppgave 5.2: Frekvensresponsen fra T i til T for regulert system Kapittel 6 Stabilitetsanalyse Oppgave 6. Stabilitetsegenskap for transferfunksjoner Bestem stabilitetsegenskapen for følgende
NTNU Fakultet for teknologi
 NTNU Fakultet for teknologi Eksamensdato: 7. juni 2016 Fag: Faglærer: Løsningsforslag, versjon 6 TELE2001 Reguleringsteknikk Fredrik Dessen Del 1. Enkle overføringsfunksjoner (25%) I disse oppgavene skal
NTNU Fakultet for teknologi Eksamensdato: 7. juni 2016 Fag: Faglærer: Løsningsforslag, versjon 6 TELE2001 Reguleringsteknikk Fredrik Dessen Del 1. Enkle overføringsfunksjoner (25%) I disse oppgavene skal
Løsningsforslag øving 6
 TTK5 Reguleringsteknikk, Vår Løsningsforslag øving Oppgave Vi setter inntil videre at τ = e τs. a) Finn først h s) gitt ved h s) = T i s T s) + T i s) ) ) ) ) + ζ s ω + s ω Vi starter med amplitudeforløpet.
TTK5 Reguleringsteknikk, Vår Løsningsforslag øving Oppgave Vi setter inntil videre at τ = e τs. a) Finn først h s) gitt ved h s) = T i s T s) + T i s) ) ) ) ) + ζ s ω + s ω Vi starter med amplitudeforløpet.
Eksamensoppgave i TELE2001 Reguleringsteknikk
 Fakultet for teknologi Eksamensoppgave i TELE2001 Reguleringsteknikk Faglig kontakt under eksamen: Fredrik Dessen Tlf.: 48159443 Eksamensdato: 7. juni 2016 Eksamenstid (fra-til): 09:00 til 14:00 Hjelpemiddelkode/Tillatte
Fakultet for teknologi Eksamensoppgave i TELE2001 Reguleringsteknikk Faglig kontakt under eksamen: Fredrik Dessen Tlf.: 48159443 Eksamensdato: 7. juni 2016 Eksamenstid (fra-til): 09:00 til 14:00 Hjelpemiddelkode/Tillatte
Øving 1 ITD Industriell IT
 Utlevert : uke 37 Innlevert : uke 39 (senest torsdag 29. sept) Avdeling for Informasjonsteknologi Høgskolen i Østfold Øving 1 ITD 30005 Industriell IT Øvingen skal utføres individuelt. Det forutsettes
Utlevert : uke 37 Innlevert : uke 39 (senest torsdag 29. sept) Avdeling for Informasjonsteknologi Høgskolen i Østfold Øving 1 ITD 30005 Industriell IT Øvingen skal utføres individuelt. Det forutsettes
Lineær analyse i SIMULINK
 Lineær analyse i SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 20.12 2002 1 2 Lineær analyse i SIMULINK Innhold 1 Innledning 7 2 Kommandobasert linearisering av modeller 9
Lineær analyse i SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 20.12 2002 1 2 Lineær analyse i SIMULINK Innhold 1 Innledning 7 2 Kommandobasert linearisering av modeller 9
NB! Vedlegg 2 skal benyttes i forbindelse med oppgave 3a), og vedlegges besvarelsen.
, og vedlegges besvarelsen.") SLUTTPRØVE EMNE: EE407 Kybernetikk videregående LÆRER Kjell Erik Wolden KLASSE(R): IA, EL DATO: 0..0 PRØVETID, fra - til (kl.): 9.00.00 Oppgavesettet består av følgende: Antall sider (inkl. vedlegg): 0
SLUTTPRØVE EMNE: EE407 Kybernetikk videregående LÆRER Kjell Erik Wolden KLASSE(R): IA, EL DATO: 0..0 PRØVETID, fra - til (kl.): 9.00.00 Oppgavesettet består av følgende: Antall sider (inkl. vedlegg): 0
Stabilitetsanalyse. Kapittel Innledning
 Kapittel 6 Stabilitetsanalyse 6.1 Innledning I noen sammenhenger er det ønskelig å undersøke om, eller betingelsene for at, et system er stabilt eller ustabilt. Spesielt innen reguleringsteknikken er stabilitetsanalyse
Kapittel 6 Stabilitetsanalyse 6.1 Innledning I noen sammenhenger er det ønskelig å undersøke om, eller betingelsene for at, et system er stabilt eller ustabilt. Spesielt innen reguleringsteknikken er stabilitetsanalyse
Systemidentifikasjon Løsninger
 University College of Southeast Norway Systemidentifikasjon Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 7 3 Validering...
University College of Southeast Norway Systemidentifikasjon Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 7 3 Validering...
Dette er et utdrag fra kapittel 6 i boka: Reguleringsteknikk, skrevet av. Per Hveem og Kåre Bjørvik
 Dette er et utdrag fra kapittel 6 i boka: Reguleringsteknikk, skrevet av Per Hveem og Kåre Bjørvik Kapittelnummering og eksempelnummering stemmer ikke overens med det står i boka. 1 5.1 Fra overføringsfunksjon
Dette er et utdrag fra kapittel 6 i boka: Reguleringsteknikk, skrevet av Per Hveem og Kåre Bjørvik Kapittelnummering og eksempelnummering stemmer ikke overens med det står i boka. 1 5.1 Fra overføringsfunksjon
a) The loop transfer function with the process model with a P controller is given by h 0 (s) = h c (s)h p (s) = K p (1 + s)(2 + s) K p
 The loop transfer function with the process model with a P controller is given by h 0 (s) = h c (s)h p (s) = K p (1 + s)(2 + s) K p") Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, November 9, 006 SCE1106 Control Theory Solution Exercise 8 Task 1 a) The loop transfer function with
Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, November 9, 006 SCE1106 Control Theory Solution Exercise 8 Task 1 a) The loop transfer function with
Løsning til eksamen i EE4107 Kybernetikk- videregående
 Høgskolen i elemark. Finn Haugen(finn.haugen@hit.no). Løsning til eksamen i EE4107 Kybernetikk- videregående Eksamensdato: 11.6 2009. Varighet 3 timer. Vekt i sluttkarakteren: 70%. Hjelpemidler: Ingen
Høgskolen i elemark. Finn Haugen(finn.haugen@hit.no). Løsning til eksamen i EE4107 Kybernetikk- videregående Eksamensdato: 11.6 2009. Varighet 3 timer. Vekt i sluttkarakteren: 70%. Hjelpemidler: Ingen
Tilstandsestimering Oppgaver
 University College of Southeast Norway Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
University College of Southeast Norway Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
ù [rad/sek] h O [db] o o o o o o o o o o o
![ù [rad/sek] h O [db] o o o o o o o o o o o](/thumbs/74/70925277.jpg "ù [rad/sek] h O [db] o o o o o o o o o o o") D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov6_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 24 og 25 (Øving 6) Oppgave 24 Innjustering i frekvensplanet.
D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov6_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 24 og 25 (Øving 6) Oppgave 24 Innjustering i frekvensplanet.
Contents. Oppgavesamling tilbakekobling og stabilitet. 01 Innledende oppgave om ABC tilbakekobling. 02 Innledende oppgave om Nyquist diagram
 Contents Oppgavesamling tilbakekobling og stabilitet... Innledende oppgave om ABC tilbakekobling... Innledende oppgave om Nyquist diagram... 3 Bodeplott og stabilitet (H94 5)... 4 Bodediagram og stabilitet
Contents Oppgavesamling tilbakekobling og stabilitet... Innledende oppgave om ABC tilbakekobling... Innledende oppgave om Nyquist diagram... 3 Bodeplott og stabilitet (H94 5)... 4 Bodediagram og stabilitet
Innhold Oppgaver om AC analyse
 Innhold Oppgaver om AC analyse 30 a) Finn krets og bodeplot vedhjelp av målt impulsrespons.... 30 b) Finn krets og bodeplot vedhjelp av målt respons.... 30 Gitt Bodeplot, Del opp og finn systemfunksjon...
Innhold Oppgaver om AC analyse 30 a) Finn krets og bodeplot vedhjelp av målt impulsrespons.... 30 b) Finn krets og bodeplot vedhjelp av målt respons.... 30 Gitt Bodeplot, Del opp og finn systemfunksjon...
Løsningsforslag øving 4
 TTK405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 4 Når k 50, m 0, f 20, blir tilstandsromformen (fra innsetting i likning (3.8) i boka) Og (si A) blir: (si A) [ ] [ ] 0 0 ẋ x + u 5 2 0.
TTK405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 4 Når k 50, m 0, f 20, blir tilstandsromformen (fra innsetting i likning (3.8) i boka) Og (si A) blir: (si A) [ ] [ ] 0 0 ẋ x + u 5 2 0.
HØGSKOLEN I SØR-TRØNDELAG
 Eksamensdato Fag Dato: 11.12.14 \\hjem.hist.no\pgis\mine dokumenter\backup\fag\reguleringsteknikk\2014\eksamen\lx2014des_korrigert.wpd HØGSKOLEN I SØR-TRØNDELAG AVD. FOR INGENIØR OG NÆRINGSMIDDELFAG INSTITUTT
Eksamensdato Fag Dato: 11.12.14 \\hjem.hist.no\pgis\mine dokumenter\backup\fag\reguleringsteknikk\2014\eksamen\lx2014des_korrigert.wpd HØGSKOLEN I SØR-TRØNDELAG AVD. FOR INGENIØR OG NÆRINGSMIDDELFAG INSTITUTT
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 C:\Per\Fag\Regtek\Eksamen\Eksamen12\LX2012desEDT212Tv6.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 17. desember 2012 LØSNINGSFORSLAG (Ikke kvalitetssikra!) EDT212T Reguleringsteknikk
C:\Per\Fag\Regtek\Eksamen\Eksamen12\LX2012desEDT212Tv6.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 17. desember 2012 LØSNINGSFORSLAG (Ikke kvalitetssikra!) EDT212T Reguleringsteknikk
Del 1. Standard overføringsfunksjoner (25%)
") Eksamensdato: 8. desember 2015 HØGSKOLEN I SØR-TRØNDELAG Fakultet for teknologi Fag: Faglærer: Løsningsforslag versjon 2 TELE2001 Reguleringsteknikk Fredrik Dessen Del 1. Standard overføringsfunksjoner
Eksamensdato: 8. desember 2015 HØGSKOLEN I SØR-TRØNDELAG Fakultet for teknologi Fag: Faglærer: Løsningsforslag versjon 2 TELE2001 Reguleringsteknikk Fredrik Dessen Del 1. Standard overføringsfunksjoner
Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes It s learning. systemidentifikasjon fra sprangrespons.
 Stavanger, 29. september 2016 Det teknisknaturvitenskapelige fakultet ELE620 Systemidentifikasjon, 2016. Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes It s learning.
Stavanger, 29. september 2016 Det teknisknaturvitenskapelige fakultet ELE620 Systemidentifikasjon, 2016. Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes It s learning.
Del 1. Standard overføringsfunksjoner (25%)
") Eksamensdato: 8. desember 2015 HØGSKOLEN I SØR-TRØNDELAG Fakultet for teknologi Fag: Faglærer: Løsningsforslag versjon 5 TELE2001 Reguleringsteknikk Fredrik Dessen Del 1. Standard overføringsfunksjoner
Eksamensdato: 8. desember 2015 HØGSKOLEN I SØR-TRØNDELAG Fakultet for teknologi Fag: Faglærer: Løsningsforslag versjon 5 TELE2001 Reguleringsteknikk Fredrik Dessen Del 1. Standard overføringsfunksjoner
Tidsdiskrete systemer
 Tidsdiskrete systemer Finn Haugen TechTeach 22.juli2004 Innhold 1 Tidsdiskrete signaler 2 2 Z-transformasjonen 3 2.1 Definisjon av Z-transformasjonen... 3 2.2 Egenskaper ved Z-transformasjonen... 4 3 Differenslikninger
Tidsdiskrete systemer Finn Haugen TechTeach 22.juli2004 Innhold 1 Tidsdiskrete signaler 2 2 Z-transformasjonen 3 2.1 Definisjon av Z-transformasjonen... 3 2.2 Egenskaper ved Z-transformasjonen... 4 3 Differenslikninger
nyq Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 4 Oppstart av Matlab. c:\temp.
 nyq Inst. for elektrofag og fornybar energi Utarbeidet: PHv Fag TELE2001 Reguleringsteknikk Simulink øving 4 Revidert sist Fredrik Dessen 2015-10-04 Hensikten med denne oppgava er at du skal bli bedre
nyq Inst. for elektrofag og fornybar energi Utarbeidet: PHv Fag TELE2001 Reguleringsteknikk Simulink øving 4 Revidert sist Fredrik Dessen 2015-10-04 Hensikten med denne oppgava er at du skal bli bedre
Kontrollspørsmål fra pensum
 INNFHOLD: Kontrollspørsmål fra pensum... Integrasjonsfilter... 5 Lag et digitalt filter ved å digitalisere impulsresponsen til et analogt filter... 5 Laplace... 6 Pulsforsterker... 6 På siste forelesning
INNFHOLD: Kontrollspørsmål fra pensum... Integrasjonsfilter... 5 Lag et digitalt filter ved å digitalisere impulsresponsen til et analogt filter... 5 Laplace... 6 Pulsforsterker... 6 På siste forelesning
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: OPPG.NR.: DS4 FREKVENS OG SPRANGRESPONSANALYSE
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS4 FREKVENS OG SPRANGRESPONSANALYSE BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser og forklarende
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS4 FREKVENS OG SPRANGRESPONSANALYSE BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser og forklarende
Transformanalyse. Jan Egil Kirkebø. Universitetet i Oslo 17./23. september 2019
 Transformanalyse Jan Egil Kirkebø Universitetet i Oslo janki@ifi.uio.no 17./23. september 2019 Jan Egil Kirkebø (Inst. for Inf.) IN3190/IN4190 17./23. september 2019 1 / 22 Egenfunksjoner til LTI-systemer
Transformanalyse Jan Egil Kirkebø Universitetet i Oslo janki@ifi.uio.no 17./23. september 2019 Jan Egil Kirkebø (Inst. for Inf.) IN3190/IN4190 17./23. september 2019 1 / 22 Egenfunksjoner til LTI-systemer
Løsningsforslag Dataøving 2
 TTK45 Reguleringsteknikk, Vår 6 Løsningsforslag Dataøving Oppgave a) Modellen er gitt ved: Setter de deriverte lik : ẋ = a x c x x () ẋ = a x + c x x x (a c x ) = () x ( a + c x ) = Det gir oss likevektspunktene
TTK45 Reguleringsteknikk, Vår 6 Løsningsforslag Dataøving Oppgave a) Modellen er gitt ved: Setter de deriverte lik : ẋ = a x c x x () ẋ = a x + c x x x (a c x ) = () x ( a + c x ) = Det gir oss likevektspunktene
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge
 Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 30.11 2016. Varighet 5 timer. Vekt i sluttkarakteren: 100%. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no).
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 30.11 2016. Varighet 5 timer. Vekt i sluttkarakteren: 100%. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no).
SCE1106 Control Theory
 Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, October 26, 2006 SCE1106 Control Theory Exercise 6 Task 1 a) The poles of the open loop system is
Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, October 26, 2006 SCE1106 Control Theory Exercise 6 Task 1 a) The poles of the open loop system is
Frekvensanalyse av likestrømsmotor med diskret regulator og antialiasing filter
 C:\Per\Fag\Styresys\SANNOV\13LØSØV2.wpd Fag SO507E Styresystemer HIST-AFT Feb 2012 PHv Løsning heimeøving 2 Sanntid Revidert sist: 8/2-13 NB! Matlab har vært under endring de siste årene. Mer og mer baserer
C:\Per\Fag\Styresys\SANNOV\13LØSØV2.wpd Fag SO507E Styresystemer HIST-AFT Feb 2012 PHv Løsning heimeøving 2 Sanntid Revidert sist: 8/2-13 NB! Matlab har vært under endring de siste årene. Mer og mer baserer
48 Praktisk reguleringsteknikk
 48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
Case: Analyse av passive elektriske filtre
 HØGSKOEN I SØR-TRØNDEAG AVDEING FOR TEKNOOGI PROGRAM FOR EEKTRO- OG DATATEKNIKK N7004 TRONDHEIM Telefon jobb: 735 59584 Mobil: 911 77 898 kare.bjorvik@hist.no http://www.edt.hist.no/ Kåre Bjørvik, 15.
HØGSKOEN I SØR-TRØNDEAG AVDEING FOR TEKNOOGI PROGRAM FOR EEKTRO- OG DATATEKNIKK N7004 TRONDHEIM Telefon jobb: 735 59584 Mobil: 911 77 898 kare.bjorvik@hist.no http://www.edt.hist.no/ Kåre Bjørvik, 15.
Observer HANS-PETTER HALVORSEN, 2012.02.24. Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Observer HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Observer HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56,
Oppgave 1.1. Den første er en klassiker. Studer figur A4.1 i vedlegg 1. Finn overføringsfunksjonen ved hjelp av manuelle, grafiske metoder.
 Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4 Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen representert
Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4 Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen representert
TTK 4140 Reguleringsteknikk m/elektriske kretser Dataøving 2
 NTNU Norges teknisknaturvitenskapelige universitet Institutt for teknisk kybernetikk vårsemesteret 2004 TTK 4140 Reguleringsteknikk m/elektriske kretser Dataøving 2 Fiskelabben G-116/G-118 Uke 16: Onsdag
NTNU Norges teknisknaturvitenskapelige universitet Institutt for teknisk kybernetikk vårsemesteret 2004 TTK 4140 Reguleringsteknikk m/elektriske kretser Dataøving 2 Fiskelabben G-116/G-118 Uke 16: Onsdag
Tilstandsestimering Oppgaver
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks 203,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks 203,
303d Signalmodellering: Gated sinus a) Finn tidsfunksjonen y(t) b) Utfør en Laplace transformasjon og finn Y(s)
 Finn tidsfunksjonen y(t) b) Utfør en Laplace transformasjon og finn Y(s)") 303d Signalmodellering: Gated sinus... 1 610 Operasjonsforsterkere H2013-3... 1 805 Sallen and Key LP til Båndpass filter... 2 904 Z-transformasjon av en forsinket firkant puls.... 4 913 Chebyshev filter...
303d Signalmodellering: Gated sinus... 1 610 Operasjonsforsterkere H2013-3... 1 805 Sallen and Key LP til Båndpass filter... 2 904 Z-transformasjon av en forsinket firkant puls.... 4 913 Chebyshev filter...
HØGSKOLEN I SØR-TRØNDELAG
 Eksamensdato Fag Dato: 17.11.10 C:\Per\Fag\Regtek\Eksamen\Eksamen10\LX2011jan.wpd HØGSKOLEN I SØR-TRØNDELAG AVD. FOR INGENIØR OG NÆRINGSMIDDELFAG INSTITUTT FOR ELEKTROTEKNIKK 7. januar 2011 LØSNINGSFORSLAG
Eksamensdato Fag Dato: 17.11.10 C:\Per\Fag\Regtek\Eksamen\Eksamen10\LX2011jan.wpd HØGSKOLEN I SØR-TRØNDELAG AVD. FOR INGENIØR OG NÆRINGSMIDDELFAG INSTITUTT FOR ELEKTROTEKNIKK 7. januar 2011 LØSNINGSFORSLAG
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 7.mai 24 Varighet/eksamenstid: 5 timer Emnekode: TELE 23 Emnenavn: Signalbehandling Klasse(r): 2EI 2EE Studiepoeng: Faglærer(e):
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 7.mai 24 Varighet/eksamenstid: 5 timer Emnekode: TELE 23 Emnenavn: Signalbehandling Klasse(r): 2EI 2EE Studiepoeng: Faglærer(e):
Systemidentifikasjon
 University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet brukes som forelesningsnotater i modellbasert regulering over temaet systemidentifikasjon.
University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet brukes som forelesningsnotater i modellbasert regulering over temaet systemidentifikasjon.
Frekvensrespons. Kapittel Innledning
 Kapittel 5 Frekvensrespons 5. Innledning Et systems frekvensrespons er en frekvensavhengig funksjon som uttrykker hvilken respons sinussignaler (eller cosinussignaler) med forskjellige frekvenser i systemets
Kapittel 5 Frekvensrespons 5. Innledning Et systems frekvensrespons er en frekvensavhengig funksjon som uttrykker hvilken respons sinussignaler (eller cosinussignaler) med forskjellige frekvenser i systemets
Stabilitetsanalyse i MATLAB og LabVIEW
 Stabilitetsanalyse i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 21.12 2002 1 2 TechTeach Innhold 1 Stabilitetsanalyse i MATLAB og LabVIEW 7 1.1 MATLAB... 7 1.1.1
Stabilitetsanalyse i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 21.12 2002 1 2 TechTeach Innhold 1 Stabilitetsanalyse i MATLAB og LabVIEW 7 1.1 MATLAB... 7 1.1.1
Øving 6, løsningsforslag
 Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Øving 6, løsningsforslag Revidert sist Fredrik Dessen 2017-11-08 I løsningsforslaget til øving 2, oppgave 2.3 finner vi overføringsfunksjonene
Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Øving 6, løsningsforslag Revidert sist Fredrik Dessen 2017-11-08 I løsningsforslaget til øving 2, oppgave 2.3 finner vi overføringsfunksjonene
Reg tek final exam formelsamling
 Reg tek final exam formelsamling Andreas Klausen 6. september 202 Brukes som vanlig på eget ansvar :) Innhold Bode plot stuff 3. Kryssfrekvens........................................... 3.2 Fasemargin............................................
Reg tek final exam formelsamling Andreas Klausen 6. september 202 Brukes som vanlig på eget ansvar :) Innhold Bode plot stuff 3. Kryssfrekvens........................................... 3.2 Fasemargin............................................
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 C:\Per\Fag\Regtek\Eksamen\Eksamen11\LX2011DesEDT212T.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 20.desember 2011 LØSNINGSFORSLAG EDT212T Reguleringsteknikk grunnkurs Dato: 11.11.12
C:\Per\Fag\Regtek\Eksamen\Eksamen11\LX2011DesEDT212T.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 20.desember 2011 LØSNINGSFORSLAG EDT212T Reguleringsteknikk grunnkurs Dato: 11.11.12
Del 1. En klassiker, og en litt mer utfordrende
 Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4, løsningsforslag Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen
Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4, løsningsforslag Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: OPPG.NR.: DS4E. FREKVENS OG SPRANGRESPONSANALYSE Med ELVIS
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.12 OPPG.NR.: DS4E FREKVENS OG SPRANGRESPONSANALYSE Med ELVIS BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.12 OPPG.NR.: DS4E FREKVENS OG SPRANGRESPONSANALYSE Med ELVIS BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser
LABORATORIEØVELSE C FYS LINEÆR KRETSELEKTRONIKK 1. TILBAKEKOBLING AV 2-ORDENS SYSTEM 2. KONTURANALYSE OG NYQUISTDIAGRAMMER
 FYS322 - LINEÆR KRETSELEKTRONIKK LABORATORIEØVELSE C 1. TILBAKEKOBLING AV 2-ORDENS SYSTEM 2. KONTURANALYSE OG NYQUISTDIAGRAMMER 3. PI REGULATOR 4. FILTRE Maris Tali(maristal) maristal@student.matnat. uio.no
FYS322 - LINEÆR KRETSELEKTRONIKK LABORATORIEØVELSE C 1. TILBAKEKOBLING AV 2-ORDENS SYSTEM 2. KONTURANALYSE OG NYQUISTDIAGRAMMER 3. PI REGULATOR 4. FILTRE Maris Tali(maristal) maristal@student.matnat. uio.no
Reguleringsteknikk Sammendrag REVISJON ØRJAN LANGØY OLSEN
 2015 Reguleringsteknikk Sammendrag REVISJON 1.1.1 ØRJAN LANGØY OLSEN Innhold Ordliste... 2 PID (Proporsjonal Integral Derivasjon) regulator... 3 Ziegler-Nichols Closed-loop tuning... 3 Ziegler-Nichols
2015 Reguleringsteknikk Sammendrag REVISJON 1.1.1 ØRJAN LANGØY OLSEN Innhold Ordliste... 2 PID (Proporsjonal Integral Derivasjon) regulator... 3 Ziegler-Nichols Closed-loop tuning... 3 Ziegler-Nichols
KYBERNETIKKLABORATORIET. FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING
 KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 6.mai 215 Varighet/eksamenstid: 5 timer Emnekode: TELE 23 Emnenavn: Signalbehandling Klasse(r): 2EI 2EE Studiepoeng: 1 Faglærer(e):
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 6.mai 215 Varighet/eksamenstid: 5 timer Emnekode: TELE 23 Emnenavn: Signalbehandling Klasse(r): 2EI 2EE Studiepoeng: 1 Faglærer(e):
TTK 4140 Reguleringsteknikk m/elektriske kretser Dataøving 1
 NTNU Norges teknisknaturvitenskapelige universitet Institutt for teknisk kybernetikk vårsemesteret 2004 TTK 4140 Reguleringsteknikk m/elektriske kretser Dataøving 1 Veiledning : Fiskelabben G-116/G-118
NTNU Norges teknisknaturvitenskapelige universitet Institutt for teknisk kybernetikk vårsemesteret 2004 TTK 4140 Reguleringsteknikk m/elektriske kretser Dataøving 1 Veiledning : Fiskelabben G-116/G-118
LABORATORIEØVELSE B FYS LINEÆR KRETSELEKTRONIKK 1. LAPLACE TRANSFORMASJON 2. AC-RESPONS OG BODEPLOT 3. WIENBROFILTER
 FYS322 - LINEÆR KRETSELEKTRONIKK LABORATORIEØVELSE B. LAPLACE TRANSFORMASJON 2. AC-RESPONS OG BODEPLOT 3. WIENBROFILTER Maris Tali(maristal) maristal@student.matnat. uio.no Eino Juhani Oltedal(einojo)
FYS322 - LINEÆR KRETSELEKTRONIKK LABORATORIEØVELSE B. LAPLACE TRANSFORMASJON 2. AC-RESPONS OG BODEPLOT 3. WIENBROFILTER Maris Tali(maristal) maristal@student.matnat. uio.no Eino Juhani Oltedal(einojo)
41070 STABILITET I ELKRAFTSYSTEMER
 NTNU Gitt: 26.01.00 Fakultet for Elektroteknikk og telekommunikasjon Leveres: 09.02.00 Institutt for elkraftteknikk 1 41070 STABILITET I ELKRAFTSYSTEMER ØVING 13. Obligatorisk dataøving. Formål: - gi en
NTNU Gitt: 26.01.00 Fakultet for Elektroteknikk og telekommunikasjon Leveres: 09.02.00 Institutt for elkraftteknikk 1 41070 STABILITET I ELKRAFTSYSTEMER ØVING 13. Obligatorisk dataøving. Formål: - gi en
2003/05-001: Dynamics / Dynamikk
 Institutt for kjemisk prosessteknologi SIK 050: Prosessregulering 003/05-001: Dynamics / Dynamikk Author: Heinz A Preisig Heinz.Preisig@chemeng.ntnu.no English: Given the transfer function g(s) := s (
Institutt for kjemisk prosessteknologi SIK 050: Prosessregulering 003/05-001: Dynamics / Dynamikk Author: Heinz A Preisig Heinz.Preisig@chemeng.ntnu.no English: Given the transfer function g(s) := s (
Forelesning nr.14 INF 1410
 Forelesning nr.14 INF 1410 Frekvensrespons 1 Oversikt dagens temaer Generell frekvensrespons Resonans Kvalitetsfaktor Dempning Frekvensrespons Oppførselen For I Like til elektriske kretser i frekvensdomenet
Forelesning nr.14 INF 1410 Frekvensrespons 1 Oversikt dagens temaer Generell frekvensrespons Resonans Kvalitetsfaktor Dempning Frekvensrespons Oppførselen For I Like til elektriske kretser i frekvensdomenet
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 15.desember 2014 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 15.desember 2014 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng:
Løsningsforslag øving 8
 K405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 8 a Vi begynner med å finne M 2 s fra figur 2 i oppgaveteksten. M 2 s ω r 2 ω h m sh a sh R2 sr 2 ω K v ω 2 h m sh a sh R2 sr 2 h m sh a sh
K405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 8 a Vi begynner med å finne M 2 s fra figur 2 i oppgaveteksten. M 2 s ω r 2 ω h m sh a sh R2 sr 2 ω K v ω 2 h m sh a sh R2 sr 2 h m sh a sh
Prosjektoppgave i Ingeniørfaglig yrkesutøving og arbeidsmetoder - orientering om prosjektet
 Prosjektoppgave i Ingeniørfaglig yrkesutøving og arbeidsmetoder - orientering om prosjektet Prosjektet består av 4 arbeidspakker: 1. Litteraturstudie / teori Sett opp et generelt uttrykk for en sinusfunksjon
Prosjektoppgave i Ingeniørfaglig yrkesutøving og arbeidsmetoder - orientering om prosjektet Prosjektet består av 4 arbeidspakker: 1. Litteraturstudie / teori Sett opp et generelt uttrykk for en sinusfunksjon
LØSNINGSFORSLAG TIL SIGNALBEHANDLING 1 JUNI 2010
 LØSNINGSFORSLAG TIL SIGNALBEHANDLING JUNI Løsningsforslag til eksamen i Signalbehandling, mai Side av 5 Oppgave a) Inngangssignalet x(t) er gitt som x( t) = 5cos(π t) + 8cos(π 4 t). Bruker Eulers formel
LØSNINGSFORSLAG TIL SIGNALBEHANDLING JUNI Løsningsforslag til eksamen i Signalbehandling, mai Side av 5 Oppgave a) Inngangssignalet x(t) er gitt som x( t) = 5cos(π t) + 8cos(π 4 t). Bruker Eulers formel
Simuleringseksempel. Vi ønsker å simulere følgende system (vanntank) i MathScript: Matematisk modell:
 i MathScript: Matematisk modell:") Simuleringseksempel Vi ønsker å simulere følge system (vanntank) i MathScript: Matematisk modell: Vi har funnet følge matematiske modell for systemet: [ ] der: er nivået i tanken er pådragssignalet til
Simuleringseksempel Vi ønsker å simulere følge system (vanntank) i MathScript: Matematisk modell: Vi har funnet følge matematiske modell for systemet: [ ] der: er nivået i tanken er pådragssignalet til
Høgskoleni østfold EKSAMEN. Emnekode: Emne: ITD30005 Industriell IT. Dato: Eksamenstid: kl til kl. 1300
 Høgskoleni østfold EKSAMEN Emnekode: Emne: ITD30005 Industriell IT Dato: 15.12.2014 Eksamenstid: kl. 0900 til kl. 1300 Hjelpemidler: Faglærer: Tre A4-ark (seks sider) med egne notater. Robert Roppestad
Høgskoleni østfold EKSAMEN Emnekode: Emne: ITD30005 Industriell IT Dato: 15.12.2014 Eksamenstid: kl. 0900 til kl. 1300 Hjelpemidler: Faglærer: Tre A4-ark (seks sider) med egne notater. Robert Roppestad
Generell informasjon om faget er tilgjengelig fra It s learning.
 Stavanger,. oktober 3 Det teknisknaturvitenskapelige fakultet ELE5 Signalbehandling, 3. Generell informasjon om faget er tilgjengelig fra It s learning. Innhold 4. Frekvensrespons for system.....................
Stavanger,. oktober 3 Det teknisknaturvitenskapelige fakultet ELE5 Signalbehandling, 3. Generell informasjon om faget er tilgjengelig fra It s learning. Innhold 4. Frekvensrespons for system.....................
 FILTERDESIGN Ukeoppgavene skal leveres som selvstendige arbeider. Det forventes at alle har satt seg inn i instituttets krav til innleverte oppgaver: Norsk versjon: http://www.ifi.uio.no/studinf/skjemaer/erklaring.pdf
FILTERDESIGN Ukeoppgavene skal leveres som selvstendige arbeider. Det forventes at alle har satt seg inn i instituttets krav til innleverte oppgaver: Norsk versjon: http://www.ifi.uio.no/studinf/skjemaer/erklaring.pdf
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
01-Passivt Chebychevfilter (H00-4)
") Innhold 01-Passivt Chebychevfilter (H00-4)... 1 0-Aktivt Butterworth & Besselfilter (H03-1)... 04 Sallen and Key lavpass til båndpass filter... 3 05 Butterworth & Chebychev (H0- a-d):... 5 06 Fra 1-ordens
Innhold 01-Passivt Chebychevfilter (H00-4)... 1 0-Aktivt Butterworth & Besselfilter (H03-1)... 04 Sallen and Key lavpass til båndpass filter... 3 05 Butterworth & Chebychev (H0- a-d):... 5 06 Fra 1-ordens
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 16. Desember 2013 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng: 10 Faglærer:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 16. Desember 2013 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng: 10 Faglærer:
AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE
 AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgav en består av: ybernetikk I 2E Antall sider (inkl. forsiden): 5 Emnekode: SO 38E Dato: 5. juni 2004 Antall oppgaver: 6 Faglig
AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgav en består av: ybernetikk I 2E Antall sider (inkl. forsiden): 5 Emnekode: SO 38E Dato: 5. juni 2004 Antall oppgaver: 6 Faglig
Del 1. ACC adaptiv cruisekontroll
 Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Ekstra øving 4, løsningsforslag Revidert sist Fredrik Dessen 2017-10-18 Del 1. ACC adaptiv cruisekontroll Cruisekontroll har eksistert lenge.
Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Ekstra øving 4, løsningsforslag Revidert sist Fredrik Dessen 2017-10-18 Del 1. ACC adaptiv cruisekontroll Cruisekontroll har eksistert lenge.
Sammenlikningav simuleringsverktøyfor reguleringsteknikk
 Presentasjon ved NFA-dagene 28.-29.4 2010 Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen (finn.haugen@hit.no) Høgskolen i Telemark Innhold: Eksempler på min egen bruk av simuleringsverktøy
Presentasjon ved NFA-dagene 28.-29.4 2010 Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen (finn.haugen@hit.no) Høgskolen i Telemark Innhold: Eksempler på min egen bruk av simuleringsverktøy
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Eksamensdato: 14.5.213 Varighet/eksamenstid: Emnekode: Emnenavn: 5 timer EDT24T Signalbehandling Klasse(r): 2EI 2EE Studiepoeng: 1 Faglærer(e):
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Eksamensdato: 14.5.213 Varighet/eksamenstid: Emnekode: Emnenavn: 5 timer EDT24T Signalbehandling Klasse(r): 2EI 2EE Studiepoeng: 1 Faglærer(e):
Løsningsforslag oppgavene (Øving 3)
") D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov3_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Okt 14 PHv,DA,PG Løsningsforslag oppgavene 10-15 (Øving 3) Bare oppgave 10, 13, 14 og 15 er en
D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov3_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Okt 14 PHv,DA,PG Løsningsforslag oppgavene 10-15 (Øving 3) Bare oppgave 10, 13, 14 og 15 er en
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i INF3440/4440 Signalbehandling Eksamensdag: xx. desember 007 Tid for eksamen: Oppgavesettet er på 6 sider. Vedlegg: Tillatte hjelpemidler:
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i INF3440/4440 Signalbehandling Eksamensdag: xx. desember 007 Tid for eksamen: Oppgavesettet er på 6 sider. Vedlegg: Tillatte hjelpemidler:
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i Eksamensdag: 11. juni 27 Tid for eksamen: 14.3 17.3 Oppgavesettet er på 5 sider. Vedlegg: INF 347 / INF 447 Digital Signalbehandling
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i Eksamensdag: 11. juni 27 Tid for eksamen: 14.3 17.3 Oppgavesettet er på 5 sider. Vedlegg: INF 347 / INF 447 Digital Signalbehandling
INF1411 Obligatorisk oppgave nr. 4
 INF1411 Obligatorisk oppgave nr. 4 Fyll inn navn på alle som leverer sammen, 2 per gruppe (1 eller 3 i unntakstilfeller): 1 2 3 Informasjon og orientering I denne oppgaven skal du lære litt om responsen
INF1411 Obligatorisk oppgave nr. 4 Fyll inn navn på alle som leverer sammen, 2 per gruppe (1 eller 3 i unntakstilfeller): 1 2 3 Informasjon og orientering I denne oppgaven skal du lære litt om responsen
Utledning av Skogestads PID-regler
 Utledning av Skogestads PID-regler + +?!?!! (This version: August 0, 1998) 1 Approksimasjon av dynamikk (Skogestads halveringsregel) Vi ønsker å approksimere høyre ordens dynamikk som dødtid. Merk at rene
Utledning av Skogestads PID-regler + +?!?!! (This version: August 0, 1998) 1 Approksimasjon av dynamikk (Skogestads halveringsregel) Vi ønsker å approksimere høyre ordens dynamikk som dødtid. Merk at rene
University College of Southeast Norway. Observer HANS-PETTER HALVORSEN.
 University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet tar for seg modellbasert regulering over temaet s og tilstandsestimering. Noen forenklinger
University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet tar for seg modellbasert regulering over temaet s og tilstandsestimering. Noen forenklinger
INF1411 Obligatorisk oppgave nr. 4
 INF1411 Obligatorisk oppgave nr. 4 Fyll inn navn på alle som leverer sammen, 2 per gruppe (1 eller 3 i unntakstilfeller): 1 2 3 Informasjon og orientering I denne oppgaven skal du lære litt om responsen
INF1411 Obligatorisk oppgave nr. 4 Fyll inn navn på alle som leverer sammen, 2 per gruppe (1 eller 3 i unntakstilfeller): 1 2 3 Informasjon og orientering I denne oppgaven skal du lære litt om responsen
Oppgaven må gis etter at vi har gjennomgått bodeplot for resonanskretser. Anta at opampen er ideell og kun fungerer som en ren forsterker Rf
 Oppgaver med løsningsforslag FYS30 H009 Uke 40 H.Balk 4.4 Bodeplot for krets med reelle og komplekse poler Oppgaven må gis etter at vi har gjennomgått bodeplot for resonanskretser Anta at opampen er ideell
Oppgaver med løsningsforslag FYS30 H009 Uke 40 H.Balk 4.4 Bodeplot for krets med reelle og komplekse poler Oppgaven må gis etter at vi har gjennomgått bodeplot for resonanskretser Anta at opampen er ideell
Inst. for elektrofag og fornybar energi
 Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 3 Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-09-11 Hensikten med denne oppgaven er at du skal bli bedre kjent
Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 3 Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-09-11 Hensikten med denne oppgaven er at du skal bli bedre kjent
STE 6219 Digital signalbehandling Løsning til kontinuasjonseksamen
 HØGSKOLEN I NARVIK Institutt for data-, elektro-, og romteknologi Masterstudiet EL/RT Side av 4 STE 629 Digital signalbehandling Løsning til kontinuasjonseksamen Tid: Fredag 03.08.2007, kl: 09:00-2:00
HØGSKOLEN I NARVIK Institutt for data-, elektro-, og romteknologi Masterstudiet EL/RT Side av 4 STE 629 Digital signalbehandling Løsning til kontinuasjonseksamen Tid: Fredag 03.08.2007, kl: 09:00-2:00
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Eksamensdato: 17.12.2014 Varighet/eksamenstid: Emnekode: Emnenavn: Klasse(r): 3 timer TELE1001A 14H Ingeniørfaglig yrkesutøving og arbeidsmetoder
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Eksamensdato: 17.12.2014 Varighet/eksamenstid: Emnekode: Emnenavn: Klasse(r): 3 timer TELE1001A 14H Ingeniørfaglig yrkesutøving og arbeidsmetoder
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 19.5.211 Varighet/eksamenstid: Emnekode: 5 timer EDT24T Emnenavn: Signalbehandling 1 Klasse(r): 2EE Studiepoeng: 1 Faglærer(e): Håkon Grønning
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 19.5.211 Varighet/eksamenstid: Emnekode: 5 timer EDT24T Emnenavn: Signalbehandling 1 Klasse(r): 2EE Studiepoeng: 1 Faglærer(e): Håkon Grønning
EKSAMEN Emnekode: ITD30005
 Ind.IT Løsning 5.des 2018 EKSAMEN Emnekode: ITD30005 Dato: 5.12.2018 Emnenavn: Industriell IT Eksamenstid: 4 timer Robert Roppestad Løsningsforslag. Ind.IT Løsning 5.des 2018 ~ 1 ~ Oppgave 1. (7%) Overvåking:
Ind.IT Løsning 5.des 2018 EKSAMEN Emnekode: ITD30005 Dato: 5.12.2018 Emnenavn: Industriell IT Eksamenstid: 4 timer Robert Roppestad Løsningsforslag. Ind.IT Løsning 5.des 2018 ~ 1 ~ Oppgave 1. (7%) Overvåking: