Tilstandsrommodeller. Hans- Pe1er Halvorsen, M.Sc.
|
|
|
- Hildegunn Olsen
- 9 år siden
- Visninger:
Transkript
1 Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc.










2 Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden 1.orden Analyse/Design Stabilitets- analyse Det komplekse plan 2. Frekvensrespons 1. Systemets poler Bodediagram Realisering/ Implementering Reguleringsteknikk Serie, Parallel, Feedback Det komplekse plan S- planet K = Forsterkning T=Tidskonstant Sprang- respons 1.orden med >dsforsinkelse Diskre@sering Reguleringssystem Asympto>sk stabilt system Air Heater Tidsplanet Ustabilt system Marginalt stabilt system Asympto>sk stabilt system Marginalt stabilt system Ustabilt system

 differenislalikninger Generelt består et dynamisk system av flere enn en differensiallikning, slik at de1e er en veldig hendig måte å se1e opp det dynamiske systemet på.")
3 Tilstandsrommodeller Tilstandsrom- modeller Spesial>lfelle Differensial- likninger Laplace Transfer- funksjoner En strukturert form/kompakt form når vi har et se1 med 1.ordens (lineære) differenislalikninger Generelt består et dynamisk system av flere enn en differensiallikning, slik at de1e er en veldig hendig måte å se1e opp det dynamiske systemet på. Veldig mye reguleringsteori (da særlig avansert reguleringsteori) er basert på at systemet er sa1 opp på >lstandsromform Tilstandsrommodeller kan enkelt implementers i LabVIEW, MathScript, osv.

4 Tilstandsrommodeller Dynamisk System u1, u2, u3, inngangssignaler (pådrag) x1, x2, x3, - interne >lstander F.eks Trykk, Temperatur, Nivå, osv. y1, y2, y3, utgangsignaler(målinger) A, B, C, D er matriser x, u, y er vektorer
 A, B, C, D er")


 y utgangen(e), dvs")
5 Tilstandsrommodeller Et se1 med lineære differensial- likninger Som se1es opp på en strukturert måte x Systemets interne >lstander u pådraget(ene) (fra regulatoren) y utgangen(e), dvs det vi fysisk måler
 (fra regulatoren) y utgangen(e), dvs")
6 Tilstandsrommodeller - Eksempel x1 og x2 Systemets interne >lstander u pådraget (fra regulatoren) y utgangen, dvs det vi fysisk måler x En vektor som består av systemets interne >lstander u En vektor som består av systemets pådrag (vi kan ha mer enn et pådrag!) y En vektor som består av systemets måling(er)

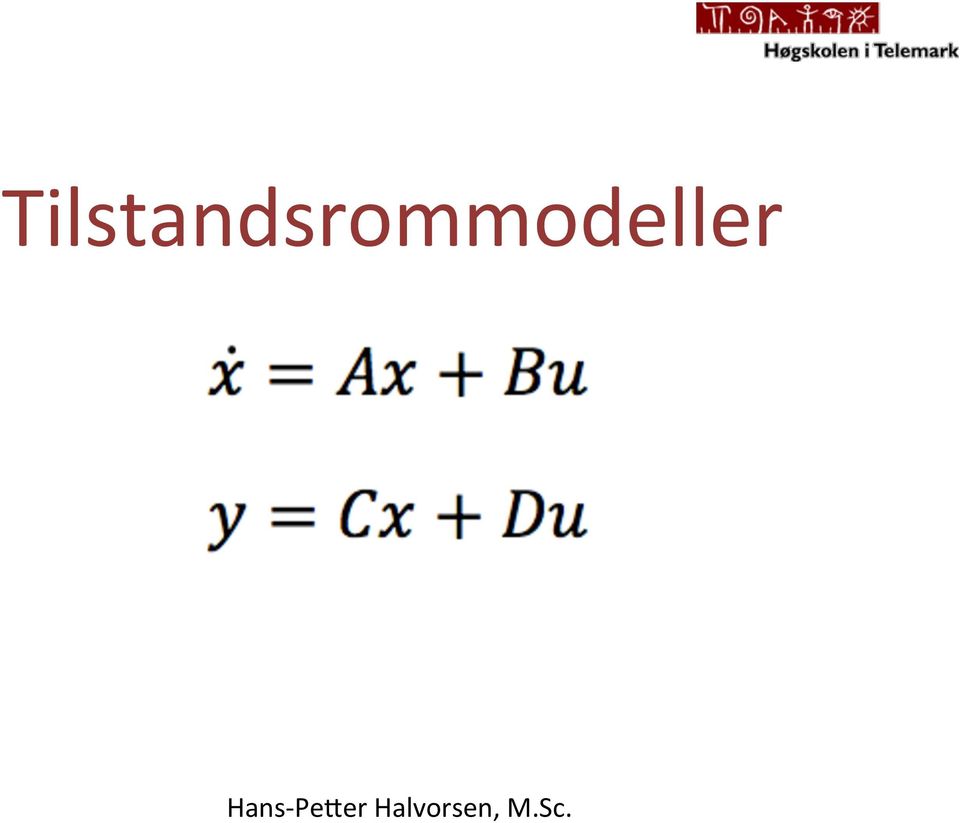
![Tilstandsrommodeller - MathScript MathScript: A = [1, 2; 3, 4]; B = [0; 1]; C = [1, 0]; D = [0]; Sprangrespons: NB!](/docs-images/17/117396/images/7-0.png "Som du ser så er de1e systemet ustabilt! model = ss(a, B, C, D) step(model) Studenter: Prøv deie!")
7 Tilstandsrommodeller - MathScript MathScript: A = [1, 2; 3, 4]; B = [0; 1]; C = [1, 0]; D = [0]; Sprangrespons: NB! Som du ser så er de1e systemet ustabilt! model = ss(a, B, C, D) step(model) Studenter: Prøv deie! Kan vi finne transferfunksjonen(e) hvis vi har funnet >lstandsrommodellen? Ja! H = tf(model)
 step(model) Studenter: Prøv deie!")
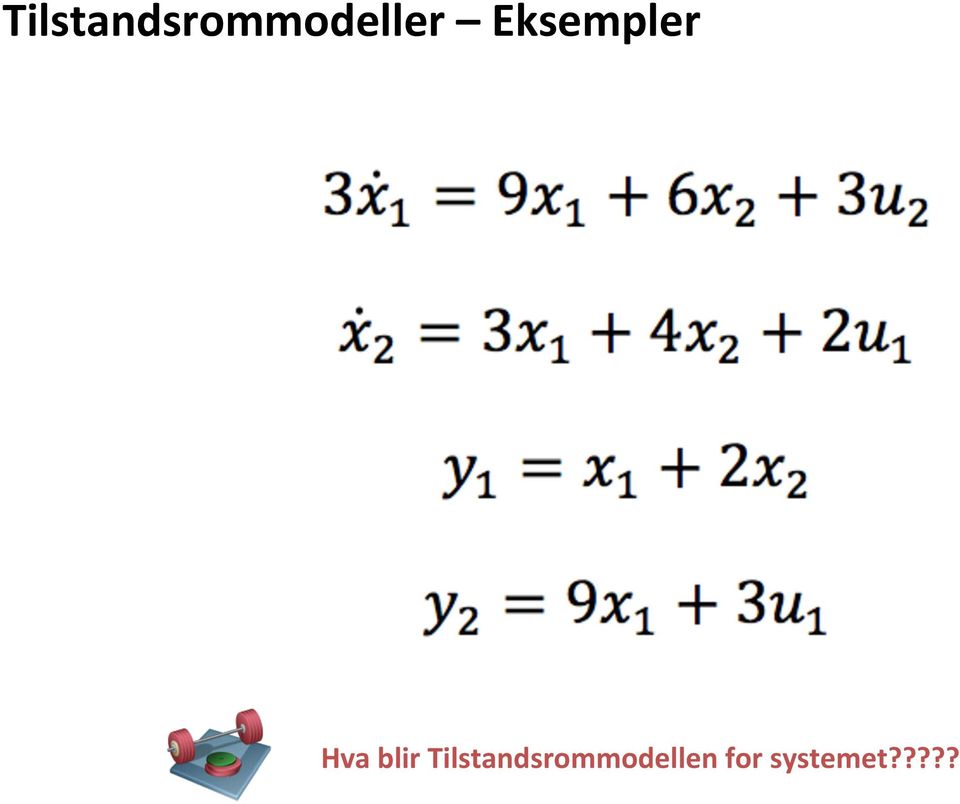
8 Tilstandsrommodeller Eksempler Hva blir Tilstandsrommodellen for systemet?????


9 Implementer denne i MathScript Hva blir Transferfunksjonen?

10 Tilstandsrommodeller Eksempler Hva blir Tilstandsrommodellen for systemet?????
?")
11 Implementer denne i MathScript Hva blir Transferfunksjonen(e)?


12 SISO Dynamisk System SIMO Dynamisk System Single Input, Single Output Single Input, Mul>ple Output MISO Dynamisk System MIMO Dynamisk System Mul>ple Input, Single Output Mul>ple Input, Mul>ple Output


13 Tilstandsrommodeller - Vanntankeksempel Systemets differenislalikninger: NB! De1e er en forenklet modell av systemet! h er nivået i tanken, mens Fout er utstrøminen i bunnen gjennom en ven>l, Kp er pumpeforsterkningen som gjør at det renner vann inn i tanken. Målet er å regulere nivået i tanken på et gi1 nivå (referanseverdi), dvs u er pådraget fra regulatoren som styrer pumpa på innløpet. Nivået h blir målt vha boblerørprinsippet. Hva blir Tilstandsrommodellen for systemet????? Dere får 5 minu1er på å finne denne, samt simulere systemet i MathScript (sprangrespons). Hva blir transferfunksjonen? Bruk disse verdiene i simuleringen Kp = 16.5; At = 78.5;



14 Tilstandsrommodeller Vanntankeksempel Systemets differenislalikninger: Vi se1er: Da får vi: Tilslu1:


![5; A = [0, -1/A_tank; 0, 0]; B = [Kp/A_tank; 0]; C](/docs-images/17/117396/images/15-1.png "= [1, 0]; D = [0]; model = ss(a, B, C, D)")

15 Tilstandsrommodeller Vanntankeksempel MathScript: clc, clear Kp = 16.5; A_tank = 78.5; A = [0, -1/A_tank; 0, 0]; B = [Kp/A_tank; 0]; C = [1, 0]; D = [0]; model = ss(a, B, C, D) step(model) Transferfunksjonen: H = tf(model) Kommentar >l resultatene: Vi ser at vanntanken oppfører seg som en typisk integrator.
![5; A = [0, -1/A_tank; 0, 0]; B = [Kp/A_tank; 0]; C = [1, 0]; D = [0]; model](/docs-images/41/117396/images/page_15.jpg "= ss(a, B, C, D) step(model) Transferfunksjonen: H = tf(model) Kommentar >l")


16 Hans- PeIer Halvorsen, M.Sc. Telemark University College Faculty of Technology Department of Electrical Engineering, Technology and E- mail: Blog: hip://home.hit.no/~hansha/ 16

Control Engineering. State-space Models. Hans-Petter Halvorsen
 Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Stabilitetsanalyse. Hans- Pe/er Halvorsen, M.Sc.
 Stabilitetsanalyse Hans- Pe/er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial@lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden
Stabilitetsanalyse Hans- Pe/er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial@lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden
MathScript. Hans- Pe1er Halvorsen, M.Sc.
 MathScript Hans- Pe1er Halvorsen, M.Sc. Ja! De1e er et IA fag dvs. både AutomaFsering og InformaFkk! Arbeidslivet krever anvendt kunnskap! Tilstandsrom- modeller Dataverktøy SpesialFlfelle MathScript LabVIEW
MathScript Hans- Pe1er Halvorsen, M.Sc. Ja! De1e er et IA fag dvs. både AutomaFsering og InformaFkk! Arbeidslivet krever anvendt kunnskap! Tilstandsrom- modeller Dataverktøy SpesialFlfelle MathScript LabVIEW
Control Engineering. Stability Analysis. Hans-Petter Halvorsen
 Control Engineering Stability Analysis Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering Stability Analysis Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering. MathScript. Hans-Petter Halvorsen
 Control Engineering MathScript Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie, Parallel,
Control Engineering MathScript Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie, Parallel,
Frequency Response and Stability Analysis. Hans- Pe9er Halvorsen, M.Sc.
 Frequency Response and Stability Analysis Hans- Pe9er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy SpesialElfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer
Frequency Response and Stability Analysis Hans- Pe9er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy SpesialElfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer
Systemidentifikasjon Oppgaver
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN, 2012.03.16 Faculty of Technology, Postboks
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN, 2012.03.16 Faculty of Technology, Postboks
Tilstandsestimering Oppgaver
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks 203,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks 203,
Frequency Response and Stability Analysis
 Control Engineering Frequency Response and Stability Analysis Hans-Petter Halvorsen Dataverktøy Spesialtilfelle MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/
Control Engineering Frequency Response and Stability Analysis Hans-Petter Halvorsen Dataverktøy Spesialtilfelle MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/
Systemidentifikasjon Oppgaver
 University College of Southeast Norway Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 4 3 Validering...
University College of Southeast Norway Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 4 3 Validering...
Tilstandsestimering Oppgaver
 University College of Southeast Norway Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
University College of Southeast Norway Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
Simuleringseksempel. Vi ønsker å simulere følgende system (vanntank) i MathScript: Matematisk modell:
 i MathScript: Matematisk modell:") Simuleringseksempel Vi ønsker å simulere følge system (vanntank) i MathScript: Matematisk modell: Vi har funnet følge matematiske modell for systemet: [ ] der: er nivået i tanken er pådragssignalet til
Simuleringseksempel Vi ønsker å simulere følge system (vanntank) i MathScript: Matematisk modell: Vi har funnet følge matematiske modell for systemet: [ ] der: er nivået i tanken er pådragssignalet til
Systemidentifikasjon Løsninger
 University College of Southeast Norway Systemidentifikasjon Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 7 3 Validering...
University College of Southeast Norway Systemidentifikasjon Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 7 3 Validering...
Observer HANS-PETTER HALVORSEN, 2012.02.24. Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Observer HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Observer HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56,
Tilstandsestimering Løsninger
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Løsninger HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Løsninger HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks
Systemidentifikasjon
 University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet brukes som forelesningsnotater i modellbasert regulering over temaet systemidentifikasjon.
University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet brukes som forelesningsnotater i modellbasert regulering over temaet systemidentifikasjon.
Kalmanfilter HANS-PETTER HALVORSEN, 2012.02.24
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56, N-3901 Porsgrunn,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56, N-3901 Porsgrunn,
Simulering i MATLAB og SIMULINK
 Simulering i MATLAB og SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 13. november 2004 1 2 TechTeach Innhold 1 Simulering av differensiallikningsmodeller 7 1.1 Innledning...
Simulering i MATLAB og SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 13. november 2004 1 2 TechTeach Innhold 1 Simulering av differensiallikningsmodeller 7 1.1 Innledning...
Stabilitetsanalyse. Kapittel Innledning
 Kapittel 6 Stabilitetsanalyse 6.1 Innledning I noen sammenhenger er det ønskelig å undersøke om, eller betingelsene for at, et system er stabilt eller ustabilt. Spesielt innen reguleringsteknikken er stabilitetsanalyse
Kapittel 6 Stabilitetsanalyse 6.1 Innledning I noen sammenhenger er det ønskelig å undersøke om, eller betingelsene for at, et system er stabilt eller ustabilt. Spesielt innen reguleringsteknikken er stabilitetsanalyse
1 Tidsdiskret PID-regulering
 Finn Haugen (finn@techteach.no), TechTeach (techteach.no) 16.2.02 1 Tidsdiskret PID-regulering 1.1 Innledning Dette notatet gir en kortfattet beskrivelse av analyse av tidsdiskrete PID-reguleringssystemer.
Finn Haugen (finn@techteach.no), TechTeach (techteach.no) 16.2.02 1 Tidsdiskret PID-regulering 1.1 Innledning Dette notatet gir en kortfattet beskrivelse av analyse av tidsdiskrete PID-reguleringssystemer.
Stabilitetsanalyse i MATLAB og LabVIEW
 Stabilitetsanalyse i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 21.12 2002 1 2 TechTeach Innhold 1 Stabilitetsanalyse i MATLAB og LabVIEW 7 1.1 MATLAB... 7 1.1.1
Stabilitetsanalyse i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 21.12 2002 1 2 TechTeach Innhold 1 Stabilitetsanalyse i MATLAB og LabVIEW 7 1.1 MATLAB... 7 1.1.1
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 20. Desember 2011 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng: 7.5 Faglærer:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 20. Desember 2011 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng: 7.5 Faglærer:
Lineær analyse i SIMULINK
 Lineær analyse i SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 20.12 2002 1 2 Lineær analyse i SIMULINK Innhold 1 Innledning 7 2 Kommandobasert linearisering av modeller 9
Lineær analyse i SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 20.12 2002 1 2 Lineær analyse i SIMULINK Innhold 1 Innledning 7 2 Kommandobasert linearisering av modeller 9
a) The loop transfer function with the process model with a P controller is given by h 0 (s) = h c (s)h p (s) = K p (1 + s)(2 + s) K p
 The loop transfer function with the process model with a P controller is given by h 0 (s) = h c (s)h p (s) = K p (1 + s)(2 + s) K p") Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, November 9, 006 SCE1106 Control Theory Solution Exercise 8 Task 1 a) The loop transfer function with
Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, November 9, 006 SCE1106 Control Theory Solution Exercise 8 Task 1 a) The loop transfer function with
Tilstandsestimering Løsninger
 University College of Southeast Norway Tilstandsestimering Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
University College of Southeast Norway Tilstandsestimering Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
c;'1 høgskolen i oslo
 c;'1 høgskolen i oslo Emne \ Emnekode Faglig veileder sa 318E Vesle møy Tyssø Bjørn EnqebretseQ ruppe(r) Dato' O, (jk.o{reksamenstid O.J 2E - 2004 -- 1ST ()~ -Ll..- j,elcsamensoppgav.ien består av Tillatte
c;'1 høgskolen i oslo Emne \ Emnekode Faglig veileder sa 318E Vesle møy Tyssø Bjørn EnqebretseQ ruppe(r) Dato' O, (jk.o{reksamenstid O.J 2E - 2004 -- 1ST ()~ -Ll..- j,elcsamensoppgav.ien består av Tillatte
Sammenlikningav simuleringsverktøyfor reguleringsteknikk
 Presentasjon ved NFA-dagene 28.-29.4 2010 Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen (finn.haugen@hit.no) Høgskolen i Telemark Innhold: Eksempler på min egen bruk av simuleringsverktøy
Presentasjon ved NFA-dagene 28.-29.4 2010 Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen (finn.haugen@hit.no) Høgskolen i Telemark Innhold: Eksempler på min egen bruk av simuleringsverktøy
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE
 AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgav en består av: ybernetikk I 2E Antall sider (inkl. forsiden): 5 Emnekode: SO 38E Dato: 5. juni 2004 Antall oppgaver: 6 Faglig
AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgav en består av: ybernetikk I 2E Antall sider (inkl. forsiden): 5 Emnekode: SO 38E Dato: 5. juni 2004 Antall oppgaver: 6 Faglig
Eksamensoppgave i TELE2001 Reguleringsteknikk
 Fakultet for teknologi Eksamensoppgave i TELE2001 Reguleringsteknikk Faglig kontakt under eksamen: Fredrik Dessen Tlf.: 48159443 Eksamensdato: 7. juni 2016 Eksamenstid (fra-til): 09:00 til 14:00 Hjelpemiddelkode/Tillatte
Fakultet for teknologi Eksamensoppgave i TELE2001 Reguleringsteknikk Faglig kontakt under eksamen: Fredrik Dessen Tlf.: 48159443 Eksamensdato: 7. juni 2016 Eksamenstid (fra-til): 09:00 til 14:00 Hjelpemiddelkode/Tillatte
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge
 Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 30.11 2016. Varighet 5 timer. Vekt i sluttkarakteren: 100%. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no).
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 30.11 2016. Varighet 5 timer. Vekt i sluttkarakteren: 100%. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no).
University College of Southeast Norway. Observer HANS-PETTER HALVORSEN.
 University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet tar for seg modellbasert regulering over temaet s og tilstandsestimering. Noen forenklinger
University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet tar for seg modellbasert regulering over temaet s og tilstandsestimering. Noen forenklinger
Kapittel 6 Stabilitetsanalyse Oppgave 6.1 Stabilitetsegenskap for transferfunksjoner
 Figur 30: Oppgave 5.2: Frekvensresponsen fra T i til T for regulert system Kapittel 6 Stabilitetsanalyse Oppgave 6. Stabilitetsegenskap for transferfunksjoner Bestem stabilitetsegenskapen for følgende
Figur 30: Oppgave 5.2: Frekvensresponsen fra T i til T for regulert system Kapittel 6 Stabilitetsanalyse Oppgave 6. Stabilitetsegenskap for transferfunksjoner Bestem stabilitetsegenskapen for følgende
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen (9701915). Emnenavn: Automatiseringsteknikk Tid fra / til: 03. desember 018. Kl. 09:00-14:00
BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen (9701915). Emnenavn: Automatiseringsteknikk Tid fra / til: 03. desember 018. Kl. 09:00-14:00
Løsningsforslag til sluttprøven i emne IA3112 Automatiseringsteknikk
 Høgskolen i Telemark. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no). Løsningsforslag til sluttprøven i emne IA3 Automatiseringsteknikk Sluttprøvens dato: 5. desember 04. Varighet 5 timer. Vekt
Høgskolen i Telemark. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no). Løsningsforslag til sluttprøven i emne IA3 Automatiseringsteknikk Sluttprøvens dato: 5. desember 04. Varighet 5 timer. Vekt
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 17. Desember 2012 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng: 7.5 Faglærer:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 17. Desember 2012 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng: 7.5 Faglærer:
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge
 Løsning til eksamen i IA32 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 24. 207. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning til oppgave a (5%).
Løsning til eksamen i IA32 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 24. 207. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning til oppgave a (5%).
2-Tank System. Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics 2-Tank System Hans- Petter Halvorsen, 2013.06.20 Faculty of Technology, Postboks 203, Kjølnes ring
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics 2-Tank System Hans- Petter Halvorsen, 2013.06.20 Faculty of Technology, Postboks 203, Kjølnes ring
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 16. Desember 2013 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng: 10 Faglærer:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato: 16. Desember 2013 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng: 10 Faglærer:
Reguleringsteknikk med LabVIEW og MathScript eksempler
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Reguleringsteknikk med LabVIEW og MathScript eksempler HANS- PETTER HALVORSEN, 2013.11.08 Faculty
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Reguleringsteknikk med LabVIEW og MathScript eksempler HANS- PETTER HALVORSEN, 2013.11.08 Faculty
KYBERNETIKKLABORATORIET. FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING
 KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
Reguleringsteknikk med LabVIEW og MathScript eksempler
 University College of Southeast Norway Reguleringsteknikk med LabVIEW og MathScript eksempler Hans-Petter Halvorsen, 2016.10.26 http://home.hit.no/~hansha Innholdsfortegnelse Innholdsfortegnelse... ii
University College of Southeast Norway Reguleringsteknikk med LabVIEW og MathScript eksempler Hans-Petter Halvorsen, 2016.10.26 http://home.hit.no/~hansha Innholdsfortegnelse Innholdsfortegnelse... ii
Reguleringsteknikk. Finn Aakre Haugen. 16. juni 2014
 Reguleringsteknikk Finn Aakre Haugen 16. juni 2014 1 2 F. Haugen: Reguleringsteknikk Innhold 1 Innledning til reguleringsteknikk 15 1.1 Grunnleggende begreper..................... 15 1.2 Hvaerreguleringgodtfor?...
Reguleringsteknikk Finn Aakre Haugen 16. juni 2014 1 2 F. Haugen: Reguleringsteknikk Innhold 1 Innledning til reguleringsteknikk 15 1.1 Grunnleggende begreper..................... 15 1.2 Hvaerreguleringgodtfor?...
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 15.desember 2014 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 15.desember 2014 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng:
Emnekode: sa 318E. Pensumlitteratur ( se liste nedenfor), fysiske tabeller, skrivesaker og kalkulator
, fysiske tabeller, skrivesaker og kalkulator") I I ~ høgskolen i oslo Emne: Gruppe(r): Eksamensoppgav en består av: Kybernetikk 2EY Antall sider (inkl. forsiden): 5 Emnekode: sa 318E Dato: 15. iuni 2004 Antall OPfgaver: Faglig veileder: Vesle møy Tyssø
I I ~ høgskolen i oslo Emne: Gruppe(r): Eksamensoppgav en består av: Kybernetikk 2EY Antall sider (inkl. forsiden): 5 Emnekode: sa 318E Dato: 15. iuni 2004 Antall OPfgaver: Faglig veileder: Vesle møy Tyssø
Løsning til eksamen i EK3114 Automatisering og vannkraftregulering ved Høgskolen i Sørøst-Norge
 Løsning til eksamen i EK3114 Automatisering og vannkraftregulering ved Høgskolen i Sørøst-Norge Eksamensdato: 24.11 2017. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning
Løsning til eksamen i EK3114 Automatisering og vannkraftregulering ved Høgskolen i Sørøst-Norge Eksamensdato: 24.11 2017. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning
EDT211T-A Reguleringsteknikk PC øving 5: Løsningsforslag
 EDT2T-A Reguleringsteknikk PC øving 5: Løsningsforslag Til simuleringene trengs en del parametre som areal i tanken, ventilkonstanter osv. Det er som oftest en stor fordel å forhåndsdefinere disse i Matlab,
EDT2T-A Reguleringsteknikk PC øving 5: Løsningsforslag Til simuleringene trengs en del parametre som areal i tanken, ventilkonstanter osv. Det er som oftest en stor fordel å forhåndsdefinere disse i Matlab,
AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE
 AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgaven består av: Kybernetikk I E Antall sider (inkl. forsiden): 7 Emnekode: SO 8E Dato: 7. juni Antall oppgaver: Faglig veileder:
AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgaven består av: Kybernetikk I E Antall sider (inkl. forsiden): 7 Emnekode: SO 8E Dato: 7. juni Antall oppgaver: Faglig veileder:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 7. januar 2011 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 7. januar 2011 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng:
KYBERNETIKKLABORATORIET. FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW Temperaturmålinger BNC-2120
 KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
SCE1106 Control Theory
 Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, October 26, 2006 SCE1106 Control Theory Exercise 6 Task 1 a) The poles of the open loop system is
Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, October 26, 2006 SCE1106 Control Theory Exercise 6 Task 1 a) The poles of the open loop system is
Motor - generatoroppgave II
 KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.17 OPPG.NR.: R113 Motor - generatoroppgave II Et reguleringssyste består av en svitsjstyrt (PWM) otor-generatorenhet og en ikrokontroller (MCU) so åler
KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.17 OPPG.NR.: R113 Motor - generatoroppgave II Et reguleringssyste består av en svitsjstyrt (PWM) otor-generatorenhet og en ikrokontroller (MCU) so åler
Simuleringsalgoritmer
 Simuleringsalgoritmer Finn Aakre Haugen, dosent Høgskolen i Telemark 14. september 2015 1 Innledning 1.1 Hva er simulering? Simulering av et system er beregning av tidsresponser vha. en matematisk modell
Simuleringsalgoritmer Finn Aakre Haugen, dosent Høgskolen i Telemark 14. september 2015 1 Innledning 1.1 Hva er simulering? Simulering av et system er beregning av tidsresponser vha. en matematisk modell
Løsning til eksamen i IA3112 Automatiseringsteknikk
 Høgskolen i Telemark/Finn Haugen (finn.haugen@hit.no). Løsning til eksamen i IA32 Automatiseringsteknikk Eksamensdato: 8. desember 203. Varighet 5 timer. Vekt i sluttkarakteren: 00%. Hjelpemidler: Ingen
Høgskolen i Telemark/Finn Haugen (finn.haugen@hit.no). Løsning til eksamen i IA32 Automatiseringsteknikk Eksamensdato: 8. desember 203. Varighet 5 timer. Vekt i sluttkarakteren: 00%. Hjelpemidler: Ingen
Nå er det på tide å se hvordan dette fungerer i praksis. Vi skal beregne et par Laplacetransformer som vi får mye bruk for senere.
 Laplace-transform: Et nyttig hjelpemiddel Side - Laplace-transformen et nyttig hjelpemiddel Hva er Laplace-transformen? Vi starter med å definere Laplace-transformen: Definisjon : La f t være en funksjon
Laplace-transform: Et nyttig hjelpemiddel Side - Laplace-transformen et nyttig hjelpemiddel Hva er Laplace-transformen? Vi starter med å definere Laplace-transformen: Definisjon : La f t være en funksjon
Løsningsforslag øving 6
 TTK5 Reguleringsteknikk, Vår Løsningsforslag øving Oppgave Vi setter inntil videre at τ = e τs. a) Finn først h s) gitt ved h s) = T i s T s) + T i s) ) ) ) ) + ζ s ω + s ω Vi starter med amplitudeforløpet.
TTK5 Reguleringsteknikk, Vår Løsningsforslag øving Oppgave Vi setter inntil videre at τ = e τs. a) Finn først h s) gitt ved h s) = T i s T s) + T i s) ) ) ) ) + ζ s ω + s ω Vi starter med amplitudeforløpet.
Løsningsforslag Dataøving 2
 TTK45 Reguleringsteknikk, Vår 6 Løsningsforslag Dataøving Oppgave a) Modellen er gitt ved: Setter de deriverte lik : ẋ = a x c x x () ẋ = a x + c x x x (a c x ) = () x ( a + c x ) = Det gir oss likevektspunktene
TTK45 Reguleringsteknikk, Vår 6 Løsningsforslag Dataøving Oppgave a) Modellen er gitt ved: Setter de deriverte lik : ẋ = a x c x x () ẋ = a x + c x x x (a c x ) = () x ( a + c x ) = Det gir oss likevektspunktene
ù [rad/sek] h O [db] o o o o o o o o o o o
![ù [rad/sek] h O [db] o o o o o o o o o o o](/thumbs/74/70925277.jpg "ù [rad/sek] h O [db] o o o o o o o o o o o") D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov6_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 24 og 25 (Øving 6) Oppgave 24 Innjustering i frekvensplanet.
D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov6_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 24 og 25 (Øving 6) Oppgave 24 Innjustering i frekvensplanet.
Simuleringsnotat. Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 6. av Stian Venseth og Kim Joar Øverås
 av Stian Venseth og Kim Joar Øverås Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 6 Sammendrag I dette arbeidsnotatet vil det bli komme frem hvordan vi har jobbet med modellering og simulering
av Stian Venseth og Kim Joar Øverås Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 6 Sammendrag I dette arbeidsnotatet vil det bli komme frem hvordan vi har jobbet med modellering og simulering
NB! Vedlegg 2 skal benyttes i forbindelse med oppgave 3a), og vedlegges besvarelsen.
, og vedlegges besvarelsen.") SLUTTPRØVE EMNE: EE407 Kybernetikk videregående LÆRER Kjell Erik Wolden KLASSE(R): IA, EL DATO: 0..0 PRØVETID, fra - til (kl.): 9.00.00 Oppgavesettet består av følgende: Antall sider (inkl. vedlegg): 0
SLUTTPRØVE EMNE: EE407 Kybernetikk videregående LÆRER Kjell Erik Wolden KLASSE(R): IA, EL DATO: 0..0 PRØVETID, fra - til (kl.): 9.00.00 Oppgavesettet består av følgende: Antall sider (inkl. vedlegg): 0
Løsningsforslag oppgavene (Øving 5)
") D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov5_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 21-23 (Øving 5) OPPGAVE 21 a) FREKVENSRESPONS I BODEDIAGRAM
D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov5_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 21-23 (Øving 5) OPPGAVE 21 a) FREKVENSRESPONS I BODEDIAGRAM
Løsning til eksamen i EE4107 Kybernetikk- videregående
 Høgskolen i elemark. Finn Haugen(finn.haugen@hit.no). Løsning til eksamen i EE4107 Kybernetikk- videregående Eksamensdato: 11.6 2009. Varighet 3 timer. Vekt i sluttkarakteren: 70%. Hjelpemidler: Ingen
Høgskolen i elemark. Finn Haugen(finn.haugen@hit.no). Løsning til eksamen i EE4107 Kybernetikk- videregående Eksamensdato: 11.6 2009. Varighet 3 timer. Vekt i sluttkarakteren: 70%. Hjelpemidler: Ingen
Øving 1 ITD Industriell IT
 Utlevert : uke 37 Innlevert : uke 39 (senest torsdag 29. sept) Avdeling for Informasjonsteknologi Høgskolen i Østfold Øving 1 ITD 30005 Industriell IT Øvingen skal utføres individuelt. Det forutsettes
Utlevert : uke 37 Innlevert : uke 39 (senest torsdag 29. sept) Avdeling for Informasjonsteknologi Høgskolen i Østfold Øving 1 ITD 30005 Industriell IT Øvingen skal utføres individuelt. Det forutsettes
Minste kvadraters metode i MATLAB og LabVIEW
 Minste kvadraters metode i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 22.12 2002 1 2 TechTeach Innhold 1 Minste kvadraters metode i MATLAB 7 2 Minste kvadraters
Minste kvadraters metode i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 22.12 2002 1 2 TechTeach Innhold 1 Minste kvadraters metode i MATLAB 7 2 Minste kvadraters
Løsning til eksamen i IA3112 Automatiseringsteknikk
 Løsning til eksamen i IA3112 Automatiseringsteknikk Eksamensdato: 03.12 2018. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning til oppgave 1 (35%) a (5%) Massebalanse: ρ*a*dh/dt
Løsning til eksamen i IA3112 Automatiseringsteknikk Eksamensdato: 03.12 2018. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning til oppgave 1 (35%) a (5%) Massebalanse: ρ*a*dh/dt
48 Praktisk reguleringsteknikk
 48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
Emnekode: Faglig veileder: Veslemøy Tyssø Bjørn Ena~bretsen. Gruppe(r): I Dato: Alle skrevne og trykte hjelpemidler, skrivesaker og kalkulator
: I Dato: Alle skrevne og trykte hjelpemidler, skrivesaker og kalkulator") G høgskolen i oslo Emne: Kybemetikk Emnekode: to 358E Faglig veileder: Veslemøy Tyssø Bjørn Enabretsen. Gruppe(r): Dato: Eksamenstid: ST - 2E i 7. juni 2005 ' Eksamensoppgaven består av: forsiden): 7 5
G høgskolen i oslo Emne: Kybemetikk Emnekode: to 358E Faglig veileder: Veslemøy Tyssø Bjørn Enabretsen. Gruppe(r): Dato: Eksamenstid: ST - 2E i 7. juni 2005 ' Eksamensoppgaven består av: forsiden): 7 5
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 C:\Per\Fag\Regtek\Eksamen\Eksamen11\LX2011DesEDT212T.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 20.desember 2011 LØSNINGSFORSLAG EDT212T Reguleringsteknikk grunnkurs Dato: 11.11.12
C:\Per\Fag\Regtek\Eksamen\Eksamen11\LX2011DesEDT212T.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 20.desember 2011 LØSNINGSFORSLAG EDT212T Reguleringsteknikk grunnkurs Dato: 11.11.12
SLUTTPRØVE. EMNEANSVARLIG: Finn Aakre Haugen. Tlf Epost: Antall sider: 14 (medregnet denne forsiden)
") Høgskolen i Telemark Avdeling for teknologiske fag SLUTTPRØVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Aakre Haugen. Tlf. 9701915. Epost: finn.haugen@hit.no. KLASSE(R): Sluttprøven består
Høgskolen i Telemark Avdeling for teknologiske fag SLUTTPRØVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Aakre Haugen. Tlf. 9701915. Epost: finn.haugen@hit.no. KLASSE(R): Sluttprøven består
Inst. for elektrofag og fornybar energi
 Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 3 Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-09-11 Hensikten med denne oppgaven er at du skal bli bedre kjent
Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 3 Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-09-11 Hensikten med denne oppgaven er at du skal bli bedre kjent
EMAR2101 Reguleringssystemer 1: Øving 3
 Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Øving 3 Oppgave 1 I underkapittel 1.1 i læreboken er det listet opp syv forskjellige formål for reguleringsteknikken,
Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Øving 3 Oppgave 1 I underkapittel 1.1 i læreboken er det listet opp syv forskjellige formål for reguleringsteknikken,
Oppgave 1.1. Den første er en klassiker. Studer figur A4.1 i vedlegg 1. Finn overføringsfunksjonen ved hjelp av manuelle, grafiske metoder.
 Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4 Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen representert
Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4 Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen representert
Emne 10 Litt mer om matriser, noen anvendelser
 Emne 10 Litt mer om matriser, noen anvendelser (Reelle) ortogonale matriser La A være en reell, kvadratisk matrise, dvs. en (n n)-matrise hvor hvert element Da vil A være ortogonal dersom: og Med menes
Emne 10 Litt mer om matriser, noen anvendelser (Reelle) ortogonale matriser La A være en reell, kvadratisk matrise, dvs. en (n n)-matrise hvor hvert element Da vil A være ortogonal dersom: og Med menes
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 C:\Per\Fag\Regtek\Eksamen\Eksamen12\LX2012desEDT212Tv6.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 17. desember 2012 LØSNINGSFORSLAG (Ikke kvalitetssikra!) EDT212T Reguleringsteknikk
C:\Per\Fag\Regtek\Eksamen\Eksamen12\LX2012desEDT212Tv6.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 17. desember 2012 LØSNINGSFORSLAG (Ikke kvalitetssikra!) EDT212T Reguleringsteknikk
Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes canvas.
 Stavanger, 26. juni 2017 Det teknisknaturvitenskapelige fakultet ELE620 Systemidentifikasjon, 2017. Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes canvas. Innhold
Stavanger, 26. juni 2017 Det teknisknaturvitenskapelige fakultet ELE620 Systemidentifikasjon, 2017. Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes canvas. Innhold
Emne 11 Differensiallikninger
 Emne 11 Differensiallikninger Differensiallikninger er en dynamisk beskrivelse av et system eller en prosess, basert på de balanselikningene vi har satt opp for prosessen. (Matematisk modellering). Vi
Emne 11 Differensiallikninger Differensiallikninger er en dynamisk beskrivelse av et system eller en prosess, basert på de balanselikningene vi har satt opp for prosessen. (Matematisk modellering). Vi
Emnekode: LO 358E. OYAo~~ Alle skrevne og trykte hjelpemidler, skrivesaker og kalkulator
 ~ h øgskolen i oslo Emne: Kybemetikk Emnekode: LO 358E Gruppe(r): Dato: \? 2E OYAo~~ Eksamensoppgav Antall sider (inkl. Antall oppgaver en består av: forsiden): 6 5 Faglig veileder: Veslemøy Tyssø Bjørn
~ h øgskolen i oslo Emne: Kybemetikk Emnekode: LO 358E Gruppe(r): Dato: \? 2E OYAo~~ Eksamensoppgav Antall sider (inkl. Antall oppgaver en består av: forsiden): 6 5 Faglig veileder: Veslemøy Tyssø Bjørn
,QQOHGQLQJ 3-1/ )DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ
DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ") 3-1/ )DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ,QQOHGQLQJ Der det er angitt referanser, er det underforstått at dette er til sider, figurer, ligninger, tabeller etc., i læreboken, dersom andre
3-1/ )DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ,QQOHGQLQJ Der det er angitt referanser, er det underforstått at dette er til sider, figurer, ligninger, tabeller etc., i læreboken, dersom andre
Contents. Oppgavesamling tilbakekobling og stabilitet. 01 Innledende oppgave om ABC tilbakekobling. 02 Innledende oppgave om Nyquist diagram
 Contents Oppgavesamling tilbakekobling og stabilitet... Innledende oppgave om ABC tilbakekobling... Innledende oppgave om Nyquist diagram... 3 Bodeplott og stabilitet (H94 5)... 4 Bodediagram og stabilitet
Contents Oppgavesamling tilbakekobling og stabilitet... Innledende oppgave om ABC tilbakekobling... Innledende oppgave om Nyquist diagram... 3 Bodeplott og stabilitet (H94 5)... 4 Bodediagram og stabilitet
EKSAMEN Emnekode: ITD30005
 Ind.IT Løsning 5.des 2018 EKSAMEN Emnekode: ITD30005 Dato: 5.12.2018 Emnenavn: Industriell IT Eksamenstid: 4 timer Robert Roppestad Løsningsforslag. Ind.IT Løsning 5.des 2018 ~ 1 ~ Oppgave 1. (7%) Overvåking:
Ind.IT Løsning 5.des 2018 EKSAMEN Emnekode: ITD30005 Dato: 5.12.2018 Emnenavn: Industriell IT Eksamenstid: 4 timer Robert Roppestad Løsningsforslag. Ind.IT Løsning 5.des 2018 ~ 1 ~ Oppgave 1. (7%) Overvåking:
EKSAMENSOPPGAVE. Høgskolen i Telemark. EMNE: IA3112 Automatiseringsteknikk. EMNEANSVARLIG: Finn Haugen (tlf ). EKSAMENSTID: 5 timer
. EKSAMENSTID: 5 timer") Høgskolen i Telemark Avdeling for teknologiske fag EKSAMENSOPPGAVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Haugen (tlf. 9701915). KLASSE(R): DATO: 18.1.013 EKSAMENSTID: 5 timer Eksamensoppgaven
Høgskolen i Telemark Avdeling for teknologiske fag EKSAMENSOPPGAVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Haugen (tlf. 9701915). KLASSE(R): DATO: 18.1.013 EKSAMENSTID: 5 timer Eksamensoppgaven
Tidsdiskrete systemer
 Tidsdiskrete systemer Finn Haugen TechTeach 22.juli2004 Innhold 1 Tidsdiskrete signaler 2 2 Z-transformasjonen 3 2.1 Definisjon av Z-transformasjonen... 3 2.2 Egenskaper ved Z-transformasjonen... 4 3 Differenslikninger
Tidsdiskrete systemer Finn Haugen TechTeach 22.juli2004 Innhold 1 Tidsdiskrete signaler 2 2 Z-transformasjonen 3 2.1 Definisjon av Z-transformasjonen... 3 2.2 Egenskaper ved Z-transformasjonen... 4 3 Differenslikninger
Spørretime / Oppsummering
 MAS107 Reguleringsteknikk Spørretime / Oppsummering AUD F 29. mai kl. 10:00 12:00 Generell bakgrunnsmateriale Gjennomgang av eksamen 2006 MAS107 Reguleringsteknikk, 2007: Side 1 G. Hovland Presentasjon
MAS107 Reguleringsteknikk Spørretime / Oppsummering AUD F 29. mai kl. 10:00 12:00 Generell bakgrunnsmateriale Gjennomgang av eksamen 2006 MAS107 Reguleringsteknikk, 2007: Side 1 G. Hovland Presentasjon
Finn Haugen. Oppgaver i reguleringsteknikk 1. Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i industrianlegg.
 Finn Haugen. Oppgaver i reguleringsteknikk 1 Oppgave 0.1 Hvilke variable skal reguleres? Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i industrianlegg. Oppgave 0.2 Blokkdiagram
Finn Haugen. Oppgaver i reguleringsteknikk 1 Oppgave 0.1 Hvilke variable skal reguleres? Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i industrianlegg. Oppgave 0.2 Blokkdiagram
Eksperimentell innstilling av PID-regulator
 Kapittel 4 Eksperimentell innstilling av PID-regulator 4.1 Innledning Dette kapitlet beskriver noen tradisjonelle metoder for eksperimentell innstilling av regulatorparametre i P-, PI- og PID-regulatorer,
Kapittel 4 Eksperimentell innstilling av PID-regulator 4.1 Innledning Dette kapitlet beskriver noen tradisjonelle metoder for eksperimentell innstilling av regulatorparametre i P-, PI- og PID-regulatorer,
Modellbasert regulering: Foroverkopling
 36 Generelt Dette er artikkel nr. 5 i artikkelserien Reguleringsteknikk som publiseres i AMNYTT. Artiklene er/blir som følger: Artikkel 1: Reguleringsteknikkens betydning og grunnprinsipp. (Publisert i
36 Generelt Dette er artikkel nr. 5 i artikkelserien Reguleringsteknikk som publiseres i AMNYTT. Artiklene er/blir som følger: Artikkel 1: Reguleringsteknikkens betydning og grunnprinsipp. (Publisert i
Foroverkopling. Kapittel Innledning
 Kapittel 10 Foroverkopling 10.1 Innledning Vi vet fra tidligere kapitler at tilbakekoplet regulering vil kunne bringe prosessutgangen tilstrekkelig nær referansen. I de fleste tilfeller er dette en tilstrekkelig
Kapittel 10 Foroverkopling 10.1 Innledning Vi vet fra tidligere kapitler at tilbakekoplet regulering vil kunne bringe prosessutgangen tilstrekkelig nær referansen. I de fleste tilfeller er dette en tilstrekkelig
Utledning av Skogestads PID-regler
 Utledning av Skogestads PID-regler + +?!?!! (This version: August 0, 1998) 1 Approksimasjon av dynamikk (Skogestads halveringsregel) Vi ønsker å approksimere høyre ordens dynamikk som dødtid. Merk at rene
Utledning av Skogestads PID-regler + +?!?!! (This version: August 0, 1998) 1 Approksimasjon av dynamikk (Skogestads halveringsregel) Vi ønsker å approksimere høyre ordens dynamikk som dødtid. Merk at rene
Løsningsforslag oppgavene (Øving 3)
") D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov3_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Okt 14 PHv,DA,PG Løsningsforslag oppgavene 10-15 (Øving 3) Bare oppgave 10, 13, 14 og 15 er en
D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov3_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Okt 14 PHv,DA,PG Løsningsforslag oppgavene 10-15 (Øving 3) Bare oppgave 10, 13, 14 og 15 er en
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 1 Tillatte hjelpemidler: EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnenavn: Automatiseringsteknikk
Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 1 Tillatte hjelpemidler: EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnenavn: Automatiseringsteknikk
University College of Southeast Norway. Kalmanfilter HANS-PETTER HALVORSEN,
 University College of Southeast Norway HANS-PETTER HALVORSEN, 2016.11.01 http://home.hit.no/~hansha Forord Dette dokumentet tar for seg grunnleggende modellbasert regulering over temaet. Noen forenklinger
University College of Southeast Norway HANS-PETTER HALVORSEN, 2016.11.01 http://home.hit.no/~hansha Forord Dette dokumentet tar for seg grunnleggende modellbasert regulering over temaet. Noen forenklinger
Eksamen i MIK130, Systemidentifikasjon
 DET TEKNISK - NATURVITENSKAPELIGE FAKULTET Institutt for data- og elektroteknikk Eksamen i MIK130, Systemidentifikasjon Dato: 21 februar 2007 Lengde på eksamen: 4 timer Tillatte hjelpemidler: ingen Bokmål
DET TEKNISK - NATURVITENSKAPELIGE FAKULTET Institutt for data- og elektroteknikk Eksamen i MIK130, Systemidentifikasjon Dato: 21 februar 2007 Lengde på eksamen: 4 timer Tillatte hjelpemidler: ingen Bokmål
Program for elektro- og datateknikk
 D:\Per\Fag\Regtek\Oppgavebok\2a Tank 4 øvinger\04_tank4_1_2014_v3.wpd Program for elektro- og datateknikk Fag TELE2001 Reguleringsteknikk Tank 4 øving 1. Utarbeidet: PHv Revidert sist: PHv, aug 2014 Målsetting:
D:\Per\Fag\Regtek\Oppgavebok\2a Tank 4 øvinger\04_tank4_1_2014_v3.wpd Program for elektro- og datateknikk Fag TELE2001 Reguleringsteknikk Tank 4 øving 1. Utarbeidet: PHv Revidert sist: PHv, aug 2014 Målsetting:
Løsningsforslag øving 4
 TTK405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 4 Når k 50, m 0, f 20, blir tilstandsromformen (fra innsetting i likning (3.8) i boka) Og (si A) blir: (si A) [ ] [ ] 0 0 ẋ x + u 5 2 0.
TTK405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 4 Når k 50, m 0, f 20, blir tilstandsromformen (fra innsetting i likning (3.8) i boka) Og (si A) blir: (si A) [ ] [ ] 0 0 ẋ x + u 5 2 0.
2.2.1 Framgangsmåte for matematisk modellering Modellering av massesystemer. Modellbegreper... 15
 Innhold 1 Innledning 9 2 Matematisk modellering 13 2.1 Innledning... 13 2.2 Utviklingavdynamiskemodeller... 14 2.2.1 Framgangsmåte for matematisk modellering...... 14 2.2.2 Modellering av massesystemer.
Innhold 1 Innledning 9 2 Matematisk modellering 13 2.1 Innledning... 13 2.2 Utviklingavdynamiskemodeller... 14 2.2.1 Framgangsmåte for matematisk modellering...... 14 2.2.2 Modellering av massesystemer.
Reguleringsstrukturer
 Kapittel 11 Reguleringsstrukturer Dette kapitlet beskriver diverse reguleringsstrukturer for industrielle anvendelser. I strukturene inngår én eller flere PID-reguleringssløyfer. 11.1 Kaskaderegulering
Kapittel 11 Reguleringsstrukturer Dette kapitlet beskriver diverse reguleringsstrukturer for industrielle anvendelser. I strukturene inngår én eller flere PID-reguleringssløyfer. 11.1 Kaskaderegulering
Emne 9. Egenverdier og egenvektorer
 Emne 9. Egenverdier og egenvektorer Definisjon: Vi starter med en lineær transformasjon fra til, hvor Dersom, hvor, sier vi at: er egenverdiene til A er tilhørende egenvektorer. betyr at er et reelt eller
Emne 9. Egenverdier og egenvektorer Definisjon: Vi starter med en lineær transformasjon fra til, hvor Dersom, hvor, sier vi at: er egenverdiene til A er tilhørende egenvektorer. betyr at er et reelt eller
GENERELLE VEKTORROM. Hittil har vi bare snakket om vektorrom av type
 Emne 8 GENERELLE VEKTORROM Hittil har vi bare snakket om vektorrom av type og underrom av dette. Vi definerte en mengde V som et underrom av hvis det inneholdt og var lukket under addisjon og skalar multiplikasjon.
Emne 8 GENERELLE VEKTORROM Hittil har vi bare snakket om vektorrom av type og underrom av dette. Vi definerte en mengde V som et underrom av hvis det inneholdt og var lukket under addisjon og skalar multiplikasjon.
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 15 Tillatte hjelpemidler: Emnenavn: Automatiseringsteknikk
BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 15 Tillatte hjelpemidler: Emnenavn: Automatiseringsteknikk
EDT211T Reguleringsteknikk PC-øving nr 1. NB: Det lønner seg å kjøre gjennom leksjonen før du tar fatt på selve øvingen på siste side.
 Høgskolen i Sør-Trøndelag Avdeling for Teknologi Institutt for Elektroteknikk Klasse 2EA Studieretning for automatisering EDT211T Reguleringsteknikk PC-øving nr 1 NB: Det lønner seg å kjøre gjennom leksjonen
Høgskolen i Sør-Trøndelag Avdeling for Teknologi Institutt for Elektroteknikk Klasse 2EA Studieretning for automatisering EDT211T Reguleringsteknikk PC-øving nr 1 NB: Det lønner seg å kjøre gjennom leksjonen