(12) Oversettelse av europeisk patentskrift
|
|
|
- Ludvig Berntsen
- 8 år siden
- Visninger:
Transkript
1 (12) Oversettelse av europeisk patentskrift (11) NO/EP B1 (19) NO NORGE (1) Int Cl. G08G 1/01 (06.01) G01S 7/48 (06.01) G01S 17/02 (06.01) G01S 17/06 (06.01) G01S 17/89 (06.01) G08G 1/04 (06.01) Patentstyret (21) Oversettelse publisert (80) Dato for Den Europeiske Patentmyndighets publisering av det meddelte patentet (86) Europeisk søknadsnr (86) Europeisk innleveringsdag (87) Den europeiske søknadens Publiseringsdato (84) Utpekte stater AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR (73) Innehaver Kapsch TrafficCom AG, Am Europlatz 2, 11 Wien, AT-Østerrike (72) Oppfinner Öhreneder, Christian, Pfalzauerstrasse 67, 21 Pressbaum, AT-Østerrike Ramoser, Herbert, Im Werd 11/29, Wien, AT-Østerrike Hochstöger, Stefan, Mariahilferstr. 91/23, 60 Wien, AT-Østerrike (74) Fullmektig Oslo Patentkontor AS, Postboks 7007 Majorstua, 06 OSLO, Norge (4) Benevnelse Anordning for deteksjon av kjøretøyer på en trafikkplate (6) Anførte publikasjoner DE-T DE-U US-A US-B WO-A1-01/8491
 Utpekte stater AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR (73) Innehaver Kapsch TrafficCom AG, Am Europlatz 2, 11 Wien,")
2 1 Beskrivelse Den foreliggende oppfinnelsen vedrører en anordning for deteksjon av kjøretøyer på et trafikkareal ifølge innledningen til krav 1. I området innen trafikkteknikk er det en tilbakevendende oppgave å gjenkjenne, og klassifisere kjøretøyer eller vanlige objekter, som befinner seg på et trafikkareal, og forfølge deres bevegelsesforløp. Disse informasjonene anvendes for eksempel i bompengesystemer for å kontrollere overholdelsen av bompengebetalingen. Gjenkjenningen og klassifiseringen av kjøretøyer eller objekter er imidlertid også nødvendig for identifiseringen av ulykker eller for oppstillingen av trafikkstatistikker. 1 En kjent metode for identifisering, forfølging og klassifisering av objekter er anvendelsen av laserskannere. Laserskannerne monteres over eller på siden av kjørebanen og detekterer objektene ved deres gjennomkjøring. En ulempe med denne løsningen er at laserskannerne skanner objektene bare i et plan og derfor er den fullstendige detekteringen av objektene bare mulig i forbindelse med kjøretøyets bevegelse. Hvis bevegelsen av objektene gjennom skanningsområdet ikke skjer på ensartet måte, forringes målingen. For eksempel er målingen av objektlengdene da ikke mulig, eller blir bare unøyaktig. Spesielt for trafikkøer eller stans-og-kjørsituasjoner er ikke denne fremgangsmåten godt egnet. 2 En ytterligere kjent løsning er å detektere objektene ved hjelp av stereokameraer. For disse fremgangsmåtene detekteres objektene med minst to kameraer fra forskjellige synsretninger. Fra den geometriske situasjonen av korresponderende punkter i kamerabildene er det mulig å regne ut posisjonen til punktene i tredimensjonalt rom. Ulempen er at for beregningen må avstanden av korresponderende punkter i de forskjellige kamerabildene finnes. Dette er forbundet med høy beregningskostnad. Dessuten er beregningen på sikker måte bare mulig for objektpunktene med lokale endringer av bildeinnholdet (teksturen). På arealer med betydelig ensartede farger er ingen sikker måling mulig, slik at avstandsverdiene ikke kan måles i en tett raster, men bare på spesielle steder i bildet. 3 Til slutt er det også kjent å detektere objekter med kameraer. Fra kamerabildet alene er det likevel bare mulig på unøyaktig måte å gjøre objektenes posisjoner tilgjengelige i tredimensjonalt rom. Likeså er målingene av objektene og bestemmelsene av hastighetene bare mulig på en unøyaktig måte.

3 2 En anordning av typen nevnt innledningsvis er kjent fra DE U1, som beskriver et ferdtidskamera, et såkalt Time-of-Flight (ToF) kamera, integrert i en hengelampe, også benevnt fotonblandedetektorkamera (photonic mixing devices, PMD). ToF-kameraer representerer en ny klasse av 3D-bildesensorer, som gjennomfører en pixelvis tidsmåling av lyset til en tildelt lyssender i kjente posisjoner, som også til lyssenderen og ToF-mottakeren må være tidssynkronisert tilsvarende. Signaltidsmålingen skjer i en ToF-pixel derved som regel ved hjelp av en faseinterferensmåling mellom det mottatte lyssignalet og et modulasjonssignal av lyssignalet tilført pixelen som referansesignal. For de kjente funksjonsmåtene av ToF-kameraer vises for eksempel til R. Schwarte et al., "A New Active 3D-Vision System Based on RF-Modulation Interferometry of Incoherent Licht", Photonics East-Intelligent Systems and Advanced Manufacturing, Proceedings of the SPIE, Vol. 288, Philadelphia, Anordningen kjent fra DE U1 er ikke i stand til å avdekke et stort synsfelt på tilstrekkelig oppløsning, for eksempel den totale bredden på en vei med flere filer. Oppfinnelsen har som formål å tilveiebringe en anordning for deteksjon av kjøretøyer på et trafikkareal, som overvinner ulempene med den kjente teknikkens stand og muliggjør en nøyaktig og sikrere detektering av kjøretøyer på et trafikkareal som både er i bevegelse og i ro. Dette formålet oppnås ifølge oppfinnelsen med en anordning med kjennetegnene som angitt i krav Ved anvendelsen av en forbindelse av minst to ToF-kameraer kan det oppnås en fullstendig dekning av et svært stort synsfelt, for eksempel den totale bredden av en vei med flere filer, med den ønskede oppløsningen. Videre kan med en- og samme komponenter uten ytterligere bildebearbeidningskostnad også rolig trafikk overvåkes, for eksempel på parkeringsarealer i synsfeltet til ToF-kameraet, samt også for trafikk som flyter, for eksempel på kjørestriper i det samme synsfeltet. Mens ferdtidskameraene er fordreid anordnet rundt sine synsakser respektivt overfor kjøreretningen av trafikkarealet, synsfeltet til ToF-kameraene er rettvinklet og fordreiningen skjer i retning av deres bildediagonaler, kan en større detekteringsbredde tilsvarende bildediagonalene for eksempel i veiens tverretning og samtidig også en større detekteringslengde i veiens lengderetning oppnås; samtidig forhindrer fordreiningen at for eksempel veiparallelle kanter til et objekt ligger parallell med pixelrasteren, hvorved kanter mer nøyaktig kan gjenkjennes, som skal disku-

4 3 teres enda mer utførlig senere. Oppfinnelsen baserer seg på den erkjennelse at for oppnåelse av et høyt dekningsområde må flere lyssendere anordnes ved at de fordeles for å kunne belyse det totale trafikkarealet. Derved kan det problemet oppstå at lysandelene av forskjellige lyssendere blandes, for eksempel på grunn av overlappende lyskjegler eller refleksjons- eller styreeffekter på objektene i synsfeltet. For den korrekte funksjonen av ToF-kameraer er imidlertid en nøyaktig kunnskap om sendestedet av det mottatte lyset nødvendig. Ved atskillelsen av lysandelene til de enkelte lyssenderne er det for hvert ToF-kamera mulig med en nøyaktig tildeling av det mottatte lyset til et bestemt lysutgangspunkt. 1 Som kjent i teknikken kan atskillelsen av lysandelene av den enkelte lyssenderen oppnås på forskjellige måter. Således beskriver for eksempel US B1 generelt en fremgangsmåte for å forhindre gjensidig interferens av svært nærliggende ToF-kameraer, hvori lyssenderen respektivt moduleres med en ytterligere støyandel eller drives med pseudotilfeldig vekslende modulasjonsfrekvenser (frekvenshopping). I en første hensiktsmessig utførelsesform stråler lysesenderen lys av forskjellige bølgelengder. Alternativt er lyssenderne synkronisert under hverandre og med ferdtidskameraene og stråler avvekslende sitt lys for disse. Til slutt kan lyssenderne stråle amplitudemodulerte lys med forskjellige modulasjonsmønstre, fortrinnsvis forskjellige pseudotilfeldige koder, slik at ToF-kameraene kan skille mellom lysandelene av lyssenderne ved hjelp av deres modulasjonsmønster. 2 Foretrukket er det tilveiebrakt at synsfeltene til ferdtidskameraene delvis overlappes. Derved kan objekter som befinner seg i overgangsområdet mellom to ToFkameraer, for eksempel kjøretøyer som skifter kjørefelt, detekteres korrekt. Spesielt gunstig er det når ToF-kameraer fordreid rundt deres synsakser anvendes slik at synsfeltene til to nærliggende ferdtidskameraer med rettvinklede synsfelter overlapper i hjørneområdene, hvorved fordelene med en forstørret dekningsbredde med fordelene av flerdobbelt detektering av objektet kan forbindes i overlappingsområdet. 3 Ifølge et ytterligere foretrukket kjennetegn av oppfinnelsen er det tilveiebrakt at synsaksene av minst et ferdtidskamera er orientert ved en vinkel ovenfra eller på siden av trafikkarealet i eller mot kjøreretningen av trafikkarealet. Derved kan objekter detekteres tidlig og forfølges over et lengre område, hvorved på grunn av

5 4 perspektivene øker detekteringsnøyaktigheten med økende nærhet til kameraet. En ytterligere spesielt fordelaktig utførelsesform av oppfinnelsen er kjennetegnet ved at et ferdtidskamera i tillegg genererer et intensitetsbilde av trafikkarealet og prosesserer prosesseringsanordningen til avstands- og intensitetsbilder av trafikkarealet i kombinasjon, for å detektere kjøretøyer på trafikkarealet. Ved kombinasjonen av avstands- og intensitetsinformasjon, for eksempel lysstyrkeinformasjon, er det mulig på spesielt robust måte å avgrense og detektere kjøretøyer i de detekterte bildene. Således kan for eksempel også problemer i skyggeområder unngås, hvori intensitetsinformasjonen leverer lite utsagn, eller beregner omvendte problemer i avspeilings- eller de totale absorpsjonsområdene, hvori avstandsmålingen kan være forrringet og for eksempel av bildets lysstyrkeinformasjon leverer mer robuste resultater. 1 Det er spesielt gunstig, når minst et ferdtidskamera tar opp etterfølgende avstandsog eventuelle intensitetsbilder og prosesseringsanordningen gjenkjenner i etterfølgende bilder igjen detekterte objekter, for å detektere deres bevegelse og derfra generere bevegelsesparametere og/eller signaliseringer. På denne måten er det mulig å bestemme for eksempel hastigheten og retningen på et objekt og for eksempel avlede triggersignaler for trafikkovervåkningene eller -kontrollene. 2 Foretrukket bestemmer derved prosesseringsanordningen fra avstandsbildene bevegelsesparametere av kjøretøyene, som hastigheter, oppholdstid, avstandsmålinger osv. for trafikkovervåknings-, parkeringsgebyr- eller bompengeformål. Prosesseringsanordningen kan fortrinnsvis også måle og/eller klassifisere de detekterte kjøretøyene til disse formålene, for eksempel med hensyn til størrelser, frakttilstand, aksetall osv. Oppfinnelsen forklares nærmere i det etterfølgende ved hjelp av utførelseseksempler illustrert i de vedlagte tegningene. I tegningene viser 3 Fig. 1 og 2 en første utførelsesform av anordningen ifølge oppfinnelsen i en fronttegning og i plantegningen; Fig. 3 et flytskjema av kombinerte prosesseringer av avstands- og intensitetsbilder av ToF-kameraene gjennomført av prosesseringsanordningen; Fig. 4 synsfeltene til to ToF-kameraer av en ytterligere utførelsesform av oppfinnelsen i plantegningen; Fig. skjematisk fordelen med en fordreining av pixelrasteren av et ToF-

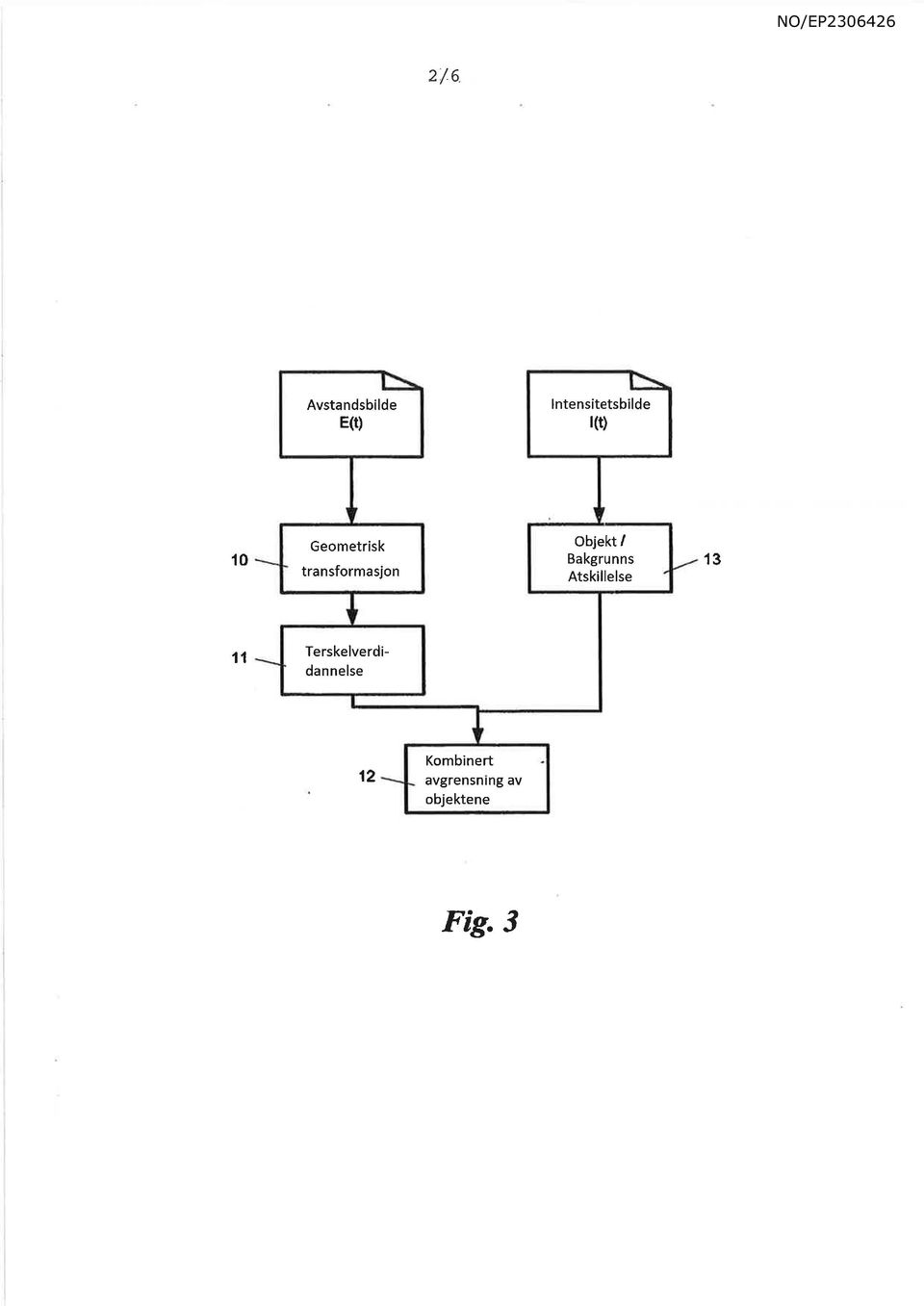
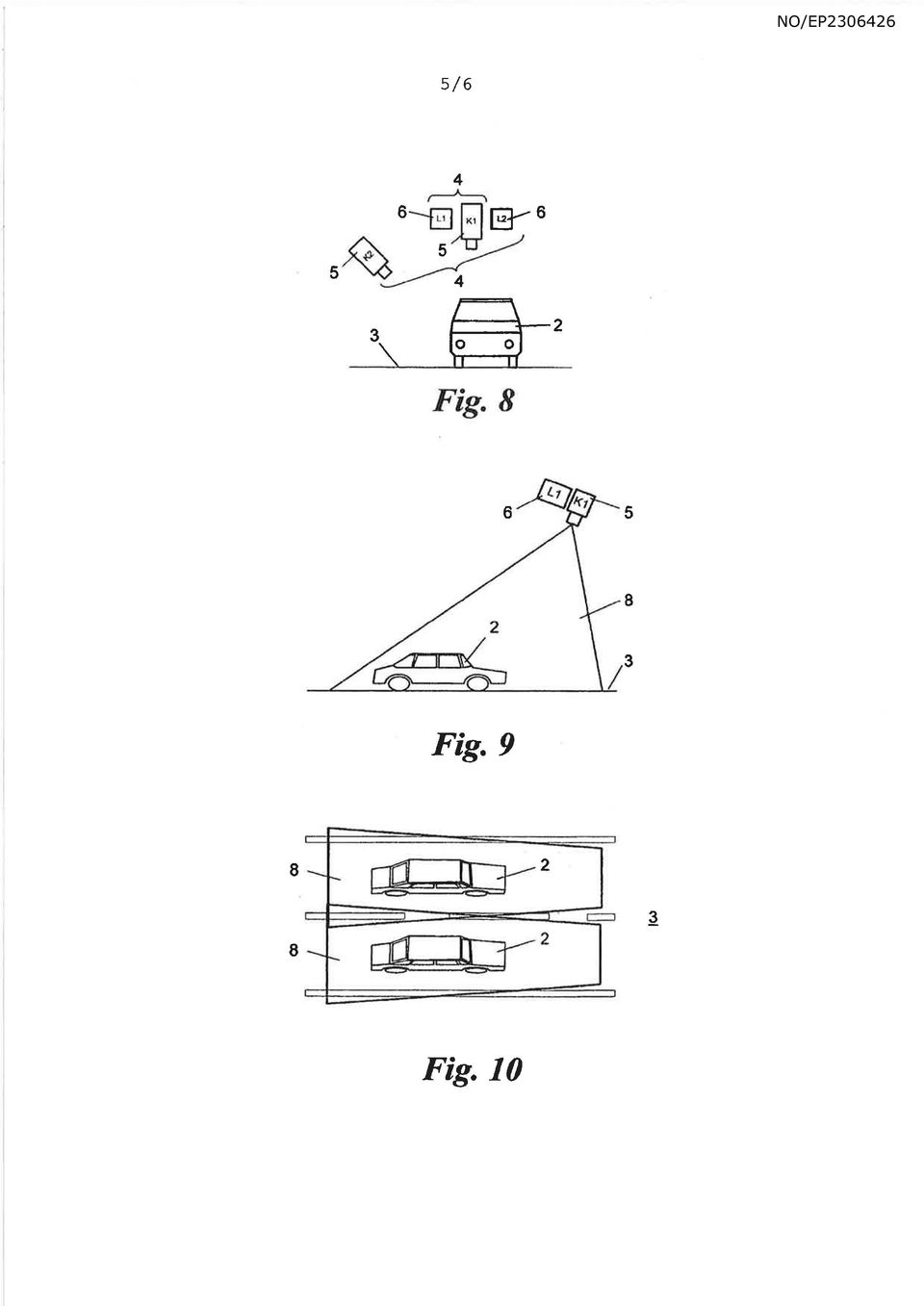
6 kamera ved detektering av et objekt med rette kanter i plantegningen; Fig. 6 og 7 synsfeltene av ToF-kameraer av to ytterligere alternative utførelsesformer av oppfinnelsen i plantegningen; Fig. 8 enda en ytterligere utførelsesform av anordningen ifølge oppfinnelsen i en fronttegning; Fig. 9 og enda en ytterligere utførelsesform av anordningen ifølge oppfinnelsen i et sideriss eller plantegningen; Fig. 11 sammensetningen av et total-avstandsbilde fra flere enkelte avstandsbilder; og Fig. 12 sammensetningen av et total-intensitetsbilde fra flere enkelte intensitetsbilder. 1 Fig. 1 viser en anordning 1 for deteksjon av objekter 2, særlig kjøretøyer, på et trafikkareal 3, for eksempel en vei. Anordningen 1 omfatter en, to eller flere enheter 4 fra respektivt et ferdtidskamera (ToF-kamera) og en tildelt lyssender 6. Enhetene 4 med ToF-kameraene og lyssenderne 6 er forbundet med en felles prosesseringsanordning 7, som prosesserer avstandsbildene E(t), såkalte 2,Dbilder, som er tatt opp av ToF-kameraene, og eventuelt i tillegg intensitetsbilder I(t), for eksempel lysstyrke- eller fargebilder, som forklares nærmere senere ved hjelp av Fig. 3. I Fig. 2 er synsfeltene 8 av to ToF-kameraer vist. Synsfeltene 8 er her noe rettvinklet og overlapper ubetydelig i et kantstripeområde 9. 2 Fig. 3 viser skjematisk et eksempel, hvor prosesseringsanordningen 7 på den ene siden fra avstandsbildet E(t) og på den andre siden fra intensitetsbildet I(t) av en (eller flere) ToF-kameraer detekterer objekter 2, og som videre kan måles og/eller klassifiseres. Intensitetsbildet I(t) inneholder i hvert bildepunkt informasjon om lysstyrken av det avbildede objektpunktet og viser objektets utseende. Avstandsbildet E(t) inneholder på den annen side i hvert bildepunkt avstanden av det avbildede objektpunktet til ToF-kameraet og viser følgelig formen på objektene. Bildepunktene i intensitetsbilde I(t) tilsvarer fortrinnsvis nøyaktig bildepunktene i avstandsbildet E(t), slik at en felles bearbeidelse fordelaktig er mulig. 3 Med hjelp av avstandsbildet E(t) er det ganske enkelt mulig å detektere objektene, dvs. særlig atskille fra bakgrunnen, og tildele hvert objekt nøyaktig det romlige

7 6 bildeområdet, som viser det respektive objektet. Dessuten omregnes i et første trinn avstandsverdiene fra bildet av ToFkameraet(ene) med hjelp av en geometrisk transformasjon i høydeverdier, dvs. i vertikale avstandsverdier av bildepunkter av trafikkarealet 3. I et andre trinn 11 ligger alle bildepunkter, deres høydeverdier - under hensyn til en terskelverdi - over trafikkarealet 3, markert som mulige objektpunkter. 1 I et tredje trinn 12 sammenfattes bildepunkter, som er markert som mulige objektpunkter, på grunn av deres geometriske posisjoner mot hverandre. Sammenfatningen baserer seg på en analyse av naboskapet til objektpunkter. Objektpunkter, som ligger ved siden av hverandre, anses å tilhøre det samme objektet. Naboskapsanalysen gjennomføres slik at små områder med feilaktig avstandsinformasjon ikke spiller noen rolle. For eksempel kan mindre hull i objekter, som dannes på grunn av målefeil i avstandsbildet, overkommes. Spesielt fordelaktig er det når det ved siden av avstandsinformasjonen E(t) også anvendes intensitetsinformasjonen I(t), for eksempel lysstyrkeinformasjon, for avgrensing av objektene. 2 Dessuten kan i trinn 13 objektene fra bakgrunnen i intensitetsbildet I(t) atskilles med forskjellige kjente fremgangsmåter, for eksempel ved beregning av et bakgrunnsbilde eller ved analyse av lysstyrkeforskjellen mellom to etterfølgende bilder i en bildesekvens. Som resultat av slike fremgangsmåter klassifiseres de enkelte bildepunktene i for- og bakgrunnspunkter. Eventuelt inndeles bildepunktene også i ytterligere kategorier, for eksempel pixel i skygger. I et ytterligere trinn sammenfattes igjen de markerte bildepunktene til områder på grunn av ders naboskap. Dette trinnet gjennomføres på fordelaktig måte i kombinasjon med de markerte objektpunktene i avstandsbildet, dvs. i tidligere nevnte trinn Avgrensningen av objektene ved hjelp av lysstyrkeinformasjonen I(t) i bildene forutsetter en tilstrekkelig høy kontrast mellom objekt og bakgrunn. De dannede objektene kan derved under omstendigheter oppløses i forskjellige deler. Ved kombinasjonen av lysstyrkeinformasjonen I(t) og avstandsinformasjonen E(t) er det likevel mulig på robust måte å avgrense bildeområdene tildelt objektene. Således

8 7 kan for eksempel også problemer i skyggeområder unngås. Når objekter kaster slagskygger på trafikkarealet 3, for eksempel en kjørebane, forandrer det lysstyrkeinformasjonen I(t) detektert i bildet og kunne ved en prosessering som baserer seg alene på lysstyrkeinformasjonen I(t) føre til at objekter gjenkjennes som falske eller at forbindelser mellom objekter dannes som i virkeligheten ikke forekommer. I kombinasjon med avstandsbildet E(t) er det mulig å unngå slike problemer, fordi i avstandsbildet E(t) gjenkjennes at i områder med slagskygger på kjørebanen forekommer ingen objekter over kjørebanen. På den annen side kunne også avstandsmålingen E(t) alene, for eksempel ved avspeiling på objekter (kjøretøykarosserier) eller ved totalabsorpsjon (svært mørke objekter) av lyset, være forringet. I slike områder kan det ytterligere hensynet til lysstyrkeinformasjonen I(t) føre til et mer robust resultat. 1 2 I tilfeller hvor objekter på grunn av perspektivene riktignok kommer til syne på nærliggende måte, hvor imidlertid hovedsakelig objektene er atskilte, registreres i avstandsbildet E(t) på typisk måte et diskontinuerlig forløp av avstandsinformasjonen (dybdeinformasjon). Sett for seg selv er forløpet av dybdeinformasjonen som avstandskriterium imidlertid ikke alltid nok til å atskille objekter på sikker måte. Den samtidige utnyttelsen av lysstyrkeinformasjonen I(t) leverer i disse tilfeller også ytterligere informasjon, som kan anvendes til atskillelse av objekter. Hvis for eksempel ved siden av det diskontinuerlige forløpet av dybdeinformasjonen også er en lysstyrkeforskjell, som sammenfaller med den springende endringen av avstanden, kan objektene atskilles med økt sikkerhet. I alle beskrevne tilfeller fører kombinasjonen av lysstyrkeinformasjon og avstandsinformasjon derfor til en klar økning av objektgjenkjenningens robushet. 3 En ytterligere funksjon med prosesseringsanordningen 7 kan være å kjenne igjen objekter i etterfølgende bilder i en bildesekvens og dermed fremstille en referanse mellom objekter i forskjellige bilder. Også her representerer den kombinerte prosesseringen av avstands- og intensitetsbildet E(t), I(t) en større fordel, fordi objektene ikke bare på grunn av deres utseende, men også på grunn av deres form, kan kjennes igjen. Ved forfølgelsen av objektene over flere bilder kan objektenes bevegelse detekteres og derfra utledes bevegelsesparametere, for eksempel hastigheten, avstanden mel-
 er det mulig å unngå slike problemer, fordi i avstandsbildet E(t) gjenkjennes at i områder med slagskygger på kjørebanen forekommer ingen objekter over")
9 8 lom objekter, oppholdstiden på et bestemt sted osv. Også her er en vesentlig fordel i forhold til kameraer, som bare kan levere intensitetsbilder: Uten avstandsinformasjon ville det bare være mulig på unøyaktig måte, ut fra bevegelsen av objekter i bildet, å gjøre deres bevegelse i tredimensjonalt rom tilgjengelig. Objekter, som er langt unna, beveger seg på grunn av perspektivene i bildet langsommere enn like rasktbevegende objekter, som er nærmere kameraet. Hvis man utnytter avstandsinformasjonen E(t), kan hastigheten til objektene i bildet omregnes til en hastighet i tredimensjonalt rom. Videre er det mulig på basis av posisjonen og bevegelsen av objekter å generere signaler for å aktivisere andre målesystemer. I en anvendelse for kontroll av veibompenger kan for eksempel kjennetegn-lesekameraer utløses når fronten av kjøretøyet overskrider en bestemt linje på veien. 1 Ved forfølgelsen av objektene 2 i en bildesekvens kan videre også en forbedring av målenøyaktigheten oppnås, hvor form og utseende til et objekt detekteres flere ganger og resultatene kombineres ved flere målinger. De enkelte bildene i en sekvens viser for et objekt i bevegelse forskjellige synlige deler av et kjøretøy. Objektdeler, som kan være tildekket i et bilde, kan være synlige i et andre bilde. Ved forfølgelsen av objektene og den dermed angitte tildelingen av informasjonene fra forskjellige bilder til et objekt, er det mulig å kombinere dataene av de enkelt opptakene til en mer nøyaktig og mer fullstendig datapost av objektet. 2 3 På denne måten er det også fullstendig mulig å detektere store objekter som lastebiler, som ikke er fullstendig inneholdt i et enkelt opptak, ved å sammenføye flere synlige deler. Avstands- og intensitetsinformasjonen E(t), I(t) tillater å sette sammen på riktig måte de enkelte synlige delene og således for større objekter til tross for dette å bestemme de ytre dimensjonene korrekt: Ved detekteringen av store objekter ved flere avstands- og intensitetsbilder er problemet å sette sammen bildedetaljene lagerriktig, slik at det sammensatte bildet av objektet er riktig representert. I avstandsbildet er det ofte ikke eller bare med utilfredsstilende nøyaktighet mulig, fordi spesielt på plane flater forekommer ikke tilstrekkelig med karakteristiske kjennetegn for bildetildelingen, se Fig. 11. Intensitetsbildet har på den annen side som regel vesentlig mer tekstur, se Fig. 12. Ved den kombinerte prosesseringen av avstandsbilde og intensitetsbilde kombineres fordelene av begge varianter, hvor bildetildelingen enter gjenomføres på basis av avstandsinformasjonen kombinert med intensitetsinformasjonen eller bare på basis av intensitetsinformasjonen og deretter overføres på avstandsbildene. Denne fremgangsmåten er - med

10 9 noe høyere beregningskostnad også mulig, når intensitetsbildene ikke opptas av ferdtidskameraet (ToF-kameraet), men av et separat standardkamera. 1 Ved siden av deteksjonen eller avgrensingen av objektene kan de detekterte avstands- og lysstyrkeinformasjonene også anvendes for klassifiseringen og forfølgelsen av objektene. Når, som tidligere, en objektforfølgelse og en dataforbedring gjennomføres, kan fordelaktig for klassifiseringen uttrekkes ved flere gangers måling i forskjellige bilder av forbedrede avstands- og intensitetsbilder. For klassifiseringen av objektene bestemmes fra avstandsbildene E(t) karakteristiske kjennetegn, som de geometriske dimensjonene (lengde, høyde, bredde), av frakttilstanden, aksetallet osv. Videre kan formen på objektet anvendes fra avstandsdataene og dets utseende fra lysstyrkeinformasjonen, for å anvise objektet med metoder av mønstergjenkjening av en objektklasse (for eksempel personbil, lastebil, osv.). Ved den inherente sammenknytningen av bildeinformasjon med tredimensjonale koordinater er det også mulig å tildele måleresultater ytterligere sensorer av et objekt detektert med et ToF-kamera, og bearbeide dataene sammen. Således er det for eksempel mulig å sammenknytte intensitetsbilder av "normale", ikkeavstandsmålende kameraer med dataene av avstandsmålende ToF-kameraer. Videre er det mulig å tildele kommunikasjonsdata, som de som detekteres ved veibompenger, på grunn av det romlige hensynet av de detekterte objektdataene. 2 Fig. 4 viser en ytterligere fordelaktig anordning, hvorved ToF-kameraene er fordreid rundt sine synsakser overfor den nominelle kjøreretningen av kjøretøyer som objekter 2. Det er bare vist grunnrisset. I grunnrisset er siktområdet til ToFkameraene inntegnet på trafikkarealet 3. I denne anordningen utnyttes den større åpningsvinkelen på ToF-kameraene med rettvinklede synsfelt i bildediagonalene. Det betyr at man utnytter hjørnene i bildene på den ene siden for å detektere kjøretøyer tidligere (bildehjørner rekker sterkere i kjøreretning), og på den annen side for å oppnå en større overlapping på siden (bildehjørner forårsaker en større lateral bildeåpningsvinkel). 3 Fig. viser at dreiningen av ToF-kameraene også for økningen av målenøyaktigheten kan være fordelaktig. Objektene 2 som skal måles på veien har ofte et rettvinklet grunnriss. Dette fører for en parallell pixelraster av synsfeltet 8 orientert til veien dessuten til at i bilde E(t) eller I(t) kan kanter av objektet 2 komme til å ligge parallelt med pixelrasteren, og faseposisjonene mellom en objektkant og rasteren er derved i alt vesentlig konstant over lengden av kanten, se Fig. under. Når kan-

11 tene som vist ovenfor i Fig. ikke kommer til å ligge parallelt med pixelrasteren, overdekker kantene respektivt en forskjellig arealdel av den enkelte pixelen. Ved dannelse av middelverdi er det da mulig på en mye mer nøyaktig måte å bestemme kantenes posisjoner. Fig. 6 viser en ytterligere fordelaktig anordning, hvori synsfeltene 8 av ToFkameraene er redusert til smale striper. Denne anordningen er lik anvendelsen av laserskannere, som detekterer objekter i bare et plan. Ved det reduserte detekteringsområdet av ToF-kameraene er mindre lyseffekt nødvendig for belysning. Dessuten kan ToF-kameraer med mindre bildeelementer (pixel) anvendes, som igjen har den fordelen at slike kameraer kan ha større bildeelementer og dermed er mer ømfindtlig. Som fordel i forhold til laserskannere fremkommer det at det totale måleplanet detekteres samtidig og at målesystemet ikke trenger noen bevegelige deler (roterende speil). 1 En fordelaktig variant av anordningen i Fig. 6 er vist i Fig. 7. Også her monteres - som i Fig. 4 - ToF-kameraene dreid rundt deres synsakser. Denne anordningen kan for eksempel anvendes for målemetoden beskrevet i patentet EP , og har også alle fordelene nevnt der. Eksempelvis muliggjør denne anordningen en måling av hastigheten, selv om bare en smal stripe av kjøretøyet detekteres. Fig. 8 viser at ToF-kameraene ikke nødvendigvis må ha en parallell synsakse, men kan for eksempel også under forskjellige vinkler være orientert på trafikkarealet 3. De enkelte ToF-kameraene kan også på forskjellige punkter være montert tildelte lyssendere 6, for for eksempel å unngå avskygninger. 2 På disse steder skal det nevnes at lyssenderne 6 atskilt fra hverandre og tildelt respektivt de enkelte ToF-kameraene ikke nødvendigvis må være dannet av lyskilder som er fysisk atskilt fra hverandre. Således kunne for eksempel for to ToFkameraer også en og samme lyskilde anvendes, som i tidsmultipleksdrift, dvs. respektivt drives avvekslende over tid for et av ToF-kameraene og som således danner lyssenderen tildelt disse ToF-kameraene. 3 Fig. 9 og viser ytterligere en fordelaktig anordning, hvorved ToF-kameraene orienteres i en retning av trafikken som nærmer seg ved en vinkel ovenfra på trafikkarealet 3. ToF-kameraene har for eksempel et avlangt bildeformat på 4:1. Kjøretøyer 2 kan dermed detekteres svært tidlig og likevel forfølges over et lengre område. Nøyaktigheten på målingen er i begynnelsen av detekteringsområdet lave-

12 11 re og øker mot slutten av detekteringsområdet med økende nærhet til kameraet. Ved forfølgelsen av objektene i en bildesekvens og den dermed angitte tildelingen av informasjonen fra forskjellige bilder til et objekt, er det dermed fordelaktig mulig å kombinere begge aspekter, en tidlig detektering og en nøyaktig avstandsmåling. Betydningsmessig er det etter meningen også mulig å bruke denne anordningen slik at kameraene er orientert på skrå mot kjøreretningen. Oppfinnelsen er ikke begrenset til de illustrerte utførelsesformene, men omfatter aller variasjoner og modifikasjoner som faller innenfor rammen av de vedlagte kravene.

13 12 Patentkrav 1. Anordning (1) for detektering av kjøretøyer (2) på et trafikkareal (3), karakterisert ved minst to ferdtidskameraer (ToF-kameraer) () samvirkende med tilhørende lyssendere (6) for generering av forskjellige avstandsbilder (E(t)) av trafikkarealet (3), hvilke kameraer er forbundet med en felles prosesseringsanordning (7) for detektering av kjøretøyer (2) i avstandsbildene (E(t)) og er anordnet over trafikkarealet, hvor lyssenderne (6) er konfigurert til å stråle forskjellige lys som bare kan detekteres av de respektive tilhørende ferdtidskameraene (), og hvor ferdtidskameraene () respektivt har rettvinklede synsfelt (8), som er fordreid anordnet rundt deres synsakser i forhold til den opprinnelige orienteringen, hvor de lengre sidene av det rettvinklede synsfeltet er anordnet parallelle med kjøreretningen av trafikkarealet Anordning ifølge krav 1, karakterisert ved at ferdtidskameraene () har synsakser som er parallellforskjøvet i forhold til hverandre. 3. Anordning ifølge krav 1 eller 2, karakterisert ved at synsfeltene (8) av ferdtidskameraene () delvis overlapper hverandre. 4. Anordning ifølge krav 3, karakterisert ved at synsfeltene (8) av to nærliggende ferdtidskameraer med rettvinklede synsfelt overlapper i hjørneområdene. 2. Anordning ifølge ett av krav 1 til 4, karakterisert ved at synsaksen av minst et ferdtidskamera () er orientert ved en vinkel ovenfra eller fra siden oppå trafikka- realet (3). 6. Anordning ifølge ett av krav 1 til, karakterisert ved at minst et ferdtidskamera () i tillegg konfigurert til å generere et intensitetsbilde (I(t)) av trafikkarelet (3) og prosesseringsanordningen (7) er konfigurert til å prosessere avstands- og intensitetsbildene (E(t), I(t)) av trafikkarealet (3) i kombinasjon for å detektere kjøretøyer (2) på trafikkarealet (3) Anordning ifølge ett av krav 1 til 6, karakterisert ved at minst et ferdtidskamera () er konfigurert til å ta opp etterfølgende avstands- og eventuelt intensitetsbil- der (E(t), I(t)) og prosesseringsanordningen (7) er konfigurert til å gjenkjenne de-
 er konfigurert til å stråle forskjellige lys som bare kan detekteres av de respektive tilhørende ferdtidskameraene (), og hvor ferdtidskameraene ()")
14 13 tekterte objekter (2) igjen i etterfølgende bilder for å detektere deres bevegelse og generere bevegelsesparametre og/eller signaliseringer derfra. 8. Anordning ifølge krav 1 til 7, karakterisert ved at prosesseringsanordningen (7) er konfigurert til å bestemme kjøretøyenes bevegelsesparametre fra avstands- bildene (E(t)). 9. Anordning ifølge ett av krav 1 til 8, karakterisert ved at prosesseringsanordningen (7) er konfigurert til å måle og/eller klassifisere de detekterte kjøretøyene (2).
). 9.")
15

16
17

18

19
20

(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 22442 B1 (19) NO NORGE (1) Int Cl. G07B 1/00 (11.01) Patentstyret (21) Oversettelse publisert 13..28 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 22442 B1 (19) NO NORGE (1) Int Cl. G07B 1/00 (11.01) Patentstyret (21) Oversettelse publisert 13..28 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 237066 B1 (19) NO NORGE (1) Int Cl. E06C 1/12 (06.01) Patentstyret (21) Oversettelse publisert 14.02.24 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 237066 B1 (19) NO NORGE (1) Int Cl. E06C 1/12 (06.01) Patentstyret (21) Oversettelse publisert 14.02.24 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2310382 B1 (19) NO NORGE (51) Int Cl. C07D 401/12 (2006.01) A61K 31/4412 (2006.01) A61P 35/00 (2006.01) C07D 401/14 (2006.01) C07D 403/12 (2006.01)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2310382 B1 (19) NO NORGE (51) Int Cl. C07D 401/12 (2006.01) A61K 31/4412 (2006.01) A61P 35/00 (2006.01) C07D 401/14 (2006.01) C07D 403/12 (2006.01)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2274977 B1 (19) NO NORGE (1) Int Cl. A01K 83/00 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02.17 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2274977 B1 (19) NO NORGE (1) Int Cl. A01K 83/00 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02.17 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 242166 B1 (19) NO NORGE (1) Int Cl. G06K 19/077 (06.01) G06K 19/06 (06.01) Patentstyret (21) Oversettelse publisert 14.02.24 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 242166 B1 (19) NO NORGE (1) Int Cl. G06K 19/077 (06.01) G06K 19/06 (06.01) Patentstyret (21) Oversettelse publisert 14.02.24 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2128505 B1 (19) NO NORGE (51) Int Cl. F16L 9/12 (2006.01) F16L 3/14 (2006.01) F16L 11/127 (2006.01) F24F 13/02 (2006.01) H05F 3/02 (2006.01) Patentstyret
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2128505 B1 (19) NO NORGE (51) Int Cl. F16L 9/12 (2006.01) F16L 3/14 (2006.01) F16L 11/127 (2006.01) F24F 13/02 (2006.01) H05F 3/02 (2006.01) Patentstyret
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2311023 B1 (19) NO NORGE (51) Int Cl. G09F 17/00 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02.17 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2311023 B1 (19) NO NORGE (51) Int Cl. G09F 17/00 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02.17 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 240726 B1 (19) NO NORGE (1) Int Cl. H0K 3/36 (2006.01) H0K 3/42 (2006.01) H0K 3/46 (2006.01) Patentstyret (21) Oversettelse publisert 2014.03.17 (80)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 240726 B1 (19) NO NORGE (1) Int Cl. H0K 3/36 (2006.01) H0K 3/42 (2006.01) H0K 3/46 (2006.01) Patentstyret (21) Oversettelse publisert 2014.03.17 (80)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2178851 B1 (19) NO NORGE (51) Int Cl. C07D 261/08 (2006.01) A61K 31/42 (2006.01) A61P 3/06 (2006.01) C07D 413/12 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2178851 B1 (19) NO NORGE (51) Int Cl. C07D 261/08 (2006.01) A61K 31/42 (2006.01) A61P 3/06 (2006.01) C07D 413/12 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 223094 B1 (19) NO NORGE (1) Int Cl. A43B 7/32 (06.01) A43B 7/12 (06.01) A43B 7/34 (06.01) A43B 13/12 (06.01) A43B 13/41 (06.01) B29D 3/14 (.01) Patentstyret
(12) Oversettelse av europeisk patentskrift (11) NO/EP 223094 B1 (19) NO NORGE (1) Int Cl. A43B 7/32 (06.01) A43B 7/12 (06.01) A43B 7/34 (06.01) A43B 13/12 (06.01) A43B 13/41 (06.01) B29D 3/14 (.01) Patentstyret
europeisk patentskrift
 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2384729 B1 (19) NO NORGE (1) Int Cl. A61G /12 (2006.01) Patentstyret (21) Oversettelse publisert 2013.04.08 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2384729 B1 (19) NO NORGE (1) Int Cl. A61G /12 (2006.01) Patentstyret (21) Oversettelse publisert 2013.04.08 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2317621 B1 (19) NO NORGE (1) Int Cl. H02G 3/12 (06.01) Patentstyret (21) Oversettelse publisert 1.02.02 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2317621 B1 (19) NO NORGE (1) Int Cl. H02G 3/12 (06.01) Patentstyret (21) Oversettelse publisert 1.02.02 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2383703 B1 (19) NO NORGE (1) Int Cl. G07B 1/06 (11.01) G08G 1/017 (06.01) Patentstyret (21) Oversettelse publisert 13.01.21 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2383703 B1 (19) NO NORGE (1) Int Cl. G07B 1/06 (11.01) G08G 1/017 (06.01) Patentstyret (21) Oversettelse publisert 13.01.21 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 11438 B1 (19) NO NORGE (1) Int Cl. E04B 1/343 (06.01) B63B 29/02 (06.01) Patentstyret (21) Oversettelse publisert.02.23 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 11438 B1 (19) NO NORGE (1) Int Cl. E04B 1/343 (06.01) B63B 29/02 (06.01) Patentstyret (21) Oversettelse publisert.02.23 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") NO/EP2770 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2770 B1 (19) NO NORGE (1) Int Cl. B23K 3/00 (06.01) C21D 6/00 (06.01) C21D 9/04 (06.01) C22C 38/00 (06.01) C22C 38/44 (06.01) Patentstyret
NO/EP2770 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2770 B1 (19) NO NORGE (1) Int Cl. B23K 3/00 (06.01) C21D 6/00 (06.01) C21D 9/04 (06.01) C22C 38/00 (06.01) C22C 38/44 (06.01) Patentstyret
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") NO/EP22342 (12) Oversettelse av europeisk patentskrift (11) NO/EP 22342 B1 (19) NO NORGE (1) Int Cl. F2D 23/04 (06.01) Patentstyret (21) Oversettelse publisert 14.01.27 (80) Dato for Den Europeiske Patentmyndighets
NO/EP22342 (12) Oversettelse av europeisk patentskrift (11) NO/EP 22342 B1 (19) NO NORGE (1) Int Cl. F2D 23/04 (06.01) Patentstyret (21) Oversettelse publisert 14.01.27 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2445326 B1 (19) NO NORGE (51) Int Cl. H05K 5/02 (2006.01) B43K 23/12 (2006.01) B43K 24/06 (2006.01) H01R 13/60 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2445326 B1 (19) NO NORGE (51) Int Cl. H05K 5/02 (2006.01) B43K 23/12 (2006.01) B43K 24/06 (2006.01) H01R 13/60 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2372667 B1 (19) NO NORGE (1) Int Cl. G08G 1/01 (06.01) G07B 1/00 (11.01) Patentstyret (21) Oversettelse publisert 13.01.21 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2372667 B1 (19) NO NORGE (1) Int Cl. G08G 1/01 (06.01) G07B 1/00 (11.01) Patentstyret (21) Oversettelse publisert 13.01.21 (80) Dato for Den Europeiske
europeisk patentskrift
 (12) Oversettelse av europeisk patentskrift (11) NO/EP 17118 B1 (19) NO NORGE (1) Int Cl. B60M 1/06 (06.01) B60M 3/04 (06.01) Patentstyret (21) Oversettelse publisert 14.09.29 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 17118 B1 (19) NO NORGE (1) Int Cl. B60M 1/06 (06.01) B60M 3/04 (06.01) Patentstyret (21) Oversettelse publisert 14.09.29 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2672278 B1 (19) NO NORGE (1) Int Cl. G01R 1/067 (2006.01) G01R 1/04 (2006.01) G01R 19/1 (2006.01) Patentstyret (21) Oversettelse publisert 201.04.20
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2672278 B1 (19) NO NORGE (1) Int Cl. G01R 1/067 (2006.01) G01R 1/04 (2006.01) G01R 19/1 (2006.01) Patentstyret (21) Oversettelse publisert 201.04.20
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 270722 B1 (19) NO NORGE (1) Int Cl. F21V 23/02 (06.01) F21S 8/02 (06.01) F21V 23/00 (06.01) Patentstyret (21) Oversettelse publisert 14.03. (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 270722 B1 (19) NO NORGE (1) Int Cl. F21V 23/02 (06.01) F21S 8/02 (06.01) F21V 23/00 (06.01) Patentstyret (21) Oversettelse publisert 14.03. (80) Dato
europeisk patentskrift
 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2184425 B1 (19) NO NORGE (51) Int Cl. E05B 17/20 (2006.01) E05B 63/00 (2006.01) Patentstyret (21) Oversettelse publisert 2012.02.06 (80) Dato for
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2184425 B1 (19) NO NORGE (51) Int Cl. E05B 17/20 (2006.01) E05B 63/00 (2006.01) Patentstyret (21) Oversettelse publisert 2012.02.06 (80) Dato for
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2148670 B1 (19) NO NORGE (51) Int Cl. A61K 31/137 (2006.01) A61P 25/04 (2006.01) Patentstyret (21) Oversettelse publisert 2012.04.02 (80) Dato for
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2148670 B1 (19) NO NORGE (51) Int Cl. A61K 31/137 (2006.01) A61P 25/04 (2006.01) Patentstyret (21) Oversettelse publisert 2012.04.02 (80) Dato for
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 21181 B1 (19) NO NORGE (1) Int Cl. F16L 2/00 (2006.01) F16L 33/26 (2006.01) H01P 1/04 (2006.01) Patentstyret (21) Oversettelse publisert 2013.10.28
(12) Oversettelse av europeisk patentskrift (11) NO/EP 21181 B1 (19) NO NORGE (1) Int Cl. F16L 2/00 (2006.01) F16L 33/26 (2006.01) H01P 1/04 (2006.01) Patentstyret (21) Oversettelse publisert 2013.10.28
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2491293 B1 (19) NO NORGE (1) Int Cl. F17C 3/02 (06.01) Patentstyret (21) Oversettelse publisert 13.11.2 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2491293 B1 (19) NO NORGE (1) Int Cl. F17C 3/02 (06.01) Patentstyret (21) Oversettelse publisert 13.11.2 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 218466 B1 (19) NO NORGE (1) Int Cl. B67C 3/26 (06.01) B6D 47/ (06.01) B67C 7/00 (06.01) Patentstyret (21) Oversettelse publisert 12.02. (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 218466 B1 (19) NO NORGE (1) Int Cl. B67C 3/26 (06.01) B6D 47/ (06.01) B67C 7/00 (06.01) Patentstyret (21) Oversettelse publisert 12.02. (80) Dato
europeisk patentskrift
 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2238877 B1 (19) NO NORGE (1) Int Cl. A47J 31/08 (06.01) Patentstyret (21) Oversettelse publisert 13.03.11 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2238877 B1 (19) NO NORGE (1) Int Cl. A47J 31/08 (06.01) Patentstyret (21) Oversettelse publisert 13.03.11 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2114970 B1 (19) NO NORGE (51) Int Cl. C07F 9/58 (2006.01) A61K 31/44 (2006.01) A61P 1/00 (2006.01) A61P 11/06 (2006.01) A61P 19/02 (2006.01) A61P
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2114970 B1 (19) NO NORGE (51) Int Cl. C07F 9/58 (2006.01) A61K 31/44 (2006.01) A61P 1/00 (2006.01) A61P 11/06 (2006.01) A61P 19/02 (2006.01) A61P
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") NO/EP2563678 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2563678 B1 (19) NO NORGE (51) Int Cl. B65D 6/00 (2006.01) Patentstyret (21) Oversettelse publisert 2015.01.19 (80) Dato for Den Europeiske
NO/EP2563678 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2563678 B1 (19) NO NORGE (51) Int Cl. B65D 6/00 (2006.01) Patentstyret (21) Oversettelse publisert 2015.01.19 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 24012 B1 (19) NO NORGE (1) Int Cl. B2C 1/00 (2006.01) B2C 1/06 (2006.01) Patentstyret (21) Oversettelse publisert 2014.12.22 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 24012 B1 (19) NO NORGE (1) Int Cl. B2C 1/00 (2006.01) B2C 1/06 (2006.01) Patentstyret (21) Oversettelse publisert 2014.12.22 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 213696 B1 (19) NO NORGE (1) Int Cl. B23K 9/32 (2006.01) B23K 9/28 (2006.01) Patentstyret (21) Oversettelse publisert 2014.04.07 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift (11) NO/EP 213696 B1 (19) NO NORGE (1) Int Cl. B23K 9/32 (2006.01) B23K 9/28 (2006.01) Patentstyret (21) Oversettelse publisert 2014.04.07 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2477830 B1 (19) NO NORGE (1) Int Cl. B60K 1/00 (06.01) Patentstyret (21) Oversettelse publisert 13.12.02 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2477830 B1 (19) NO NORGE (1) Int Cl. B60K 1/00 (06.01) Patentstyret (21) Oversettelse publisert 13.12.02 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2129377 B1 (19) NO NORGE (51) Int Cl. A61K 31/451 (2006.01) A61K 9/08 (2006.01) A61P 25/00 (2006.01) Patentstyret (21) Oversettelse publisert 2012.01.23
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2129377 B1 (19) NO NORGE (51) Int Cl. A61K 31/451 (2006.01) A61K 9/08 (2006.01) A61P 25/00 (2006.01) Patentstyret (21) Oversettelse publisert 2012.01.23
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2011486 B1 (19) NO NORGE (51) Int Cl. A61K 9/20 (2006.01) A61K 31/44 (2006.01) Patentstyret (21) Oversettelse publisert 2012.09.17 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2011486 B1 (19) NO NORGE (51) Int Cl. A61K 9/20 (2006.01) A61K 31/44 (2006.01) Patentstyret (21) Oversettelse publisert 2012.09.17 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2096736 B1 (19) NO NORGE (1) Int Cl. H02K 1/32 (2006.01) H02K 3/24 (2006.01) H02K 9/00 (2006.01) Patentstyret (21) Oversettelse publisert 2011.09.0
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2096736 B1 (19) NO NORGE (1) Int Cl. H02K 1/32 (2006.01) H02K 3/24 (2006.01) H02K 9/00 (2006.01) Patentstyret (21) Oversettelse publisert 2011.09.0
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 224294 B1 (19) NO NORGE (1) Int Cl. F16K 31/44 (2006.01) Patentstyret (21) Oversettelse publisert 2012.04.10 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 224294 B1 (19) NO NORGE (1) Int Cl. F16K 31/44 (2006.01) Patentstyret (21) Oversettelse publisert 2012.04.10 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 19724 B1 (19) NO NORGE (1) Int Cl. B63H 23/02 (06.01) Patentstyret (21) Oversettelse publisert 12.12. (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 19724 B1 (19) NO NORGE (1) Int Cl. B63H 23/02 (06.01) Patentstyret (21) Oversettelse publisert 12.12. (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 1974881 B1 (19) NO NORGE (1) Int Cl. B27B 19/00 (06.01) A61B 17/14 (06.01) Patentstyret (21) Oversettelse publisert 14.01.27 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 1974881 B1 (19) NO NORGE (1) Int Cl. B27B 19/00 (06.01) A61B 17/14 (06.01) Patentstyret (21) Oversettelse publisert 14.01.27 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 216340 B1 (19) NO NORGE (1) Int Cl. B60C 11/11 (06.01) B60C 11/03 (06.01) B60C 11/12 (06.01) Patentstyret (21) Oversettelse publisert 12.12.03 (80)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 216340 B1 (19) NO NORGE (1) Int Cl. B60C 11/11 (06.01) B60C 11/03 (06.01) B60C 11/12 (06.01) Patentstyret (21) Oversettelse publisert 12.12.03 (80)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2246321 B1 (19) NO NORGE (51) Int Cl. A61K 9/20 (2006.01) A61K 31/135 (2006.01) C07C 211/42 (2006.01) Patentstyret (21) Oversettelse publisert 2011.12.12
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2246321 B1 (19) NO NORGE (51) Int Cl. A61K 9/20 (2006.01) A61K 31/135 (2006.01) C07C 211/42 (2006.01) Patentstyret (21) Oversettelse publisert 2011.12.12
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2117944 B1 (19) NO NORGE (1) Int Cl. B6D 21/02 (2006.01) Patentstyret (21) Oversettelse publisert 2011.09.0 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2117944 B1 (19) NO NORGE (1) Int Cl. B6D 21/02 (2006.01) Patentstyret (21) Oversettelse publisert 2011.09.0 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2243894 B1 (19) NO NORGE (1) Int Cl. E04F /06 (2006.01) Patentstyret (21) Oversettelse publisert 201.01.26 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2243894 B1 (19) NO NORGE (1) Int Cl. E04F /06 (2006.01) Patentstyret (21) Oversettelse publisert 201.01.26 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2264391 B1 (19) NO NORGE (1) Int Cl. F27D 3/1 (2006.01) C21B 7/12 (2006.01) Patentstyret (21) Oversettelse publisert 2013.11.18 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2264391 B1 (19) NO NORGE (1) Int Cl. F27D 3/1 (2006.01) C21B 7/12 (2006.01) Patentstyret (21) Oversettelse publisert 2013.11.18 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift. Avviker fra Patent B1 etter innsigelse
 Oversettelse av europeisk patentskrift. Avviker fra Patent B1 etter innsigelse") (12) Oversettelse av europeisk patentskrift (11) NO/EP 217368 B2 (19) NO NORGE (1) Int Cl. B42D / (06.01) Patentstyret Avviker fra Patent B1 etter innsigelse (21) Oversettelse publisert.04. (80) Dato for
(12) Oversettelse av europeisk patentskrift (11) NO/EP 217368 B2 (19) NO NORGE (1) Int Cl. B42D / (06.01) Patentstyret Avviker fra Patent B1 etter innsigelse (21) Oversettelse publisert.04. (80) Dato for
europeisk patentskrift
 (12) Oversettelse av europeisk patentskrift (11) NO/EP 21847 B1 (19) NO NORGE (1) Int Cl. F24F 7/08 (06.01) F24F 11/04 (06.01) F24F 12/00 (06.01) Patentstyret (21) Oversettelse publisert 13.12.02 (80)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 21847 B1 (19) NO NORGE (1) Int Cl. F24F 7/08 (06.01) F24F 11/04 (06.01) F24F 12/00 (06.01) Patentstyret (21) Oversettelse publisert 13.12.02 (80)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2708433 B1 (19) NO NORGE (1) Int Cl. B61B 1/02 (2006.01) B61B 12/02 (2006.01) Patentstyret (21) Oversettelse publisert 201.01.12 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2708433 B1 (19) NO NORGE (1) Int Cl. B61B 1/02 (2006.01) B61B 12/02 (2006.01) Patentstyret (21) Oversettelse publisert 201.01.12 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2261144 B1 (19) NO NORGE (1) Int Cl. B6G 21/00 (06.01) B6G 21/08 (06.01) Patentstyret (21) Oversettelse publisert 13.07.08 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2261144 B1 (19) NO NORGE (1) Int Cl. B6G 21/00 (06.01) B6G 21/08 (06.01) Patentstyret (21) Oversettelse publisert 13.07.08 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2146836 B1 (19) NO NORGE (1) Int Cl. A47G 9/ (06.01) B26D 3/00 (06.01) B26D 3/28 (06.01) B29C 44/6 (06.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2146836 B1 (19) NO NORGE (1) Int Cl. A47G 9/ (06.01) B26D 3/00 (06.01) B26D 3/28 (06.01) B29C 44/6 (06.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2613860 B1 (19) NO NORGE (51) Int Cl. B01D 15/18 (2006.01) C11B 3/10 (2006.01) C11C 1/00 (2006.01) C11C 1/08 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2613860 B1 (19) NO NORGE (51) Int Cl. B01D 15/18 (2006.01) C11B 3/10 (2006.01) C11C 1/00 (2006.01) C11C 1/08 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2097141 B1 (19) NO NORGE (51) Int Cl. A62B 35/00 (2006.01) Patentstyret (21) Oversettelse publisert 2013.08.19 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2097141 B1 (19) NO NORGE (51) Int Cl. A62B 35/00 (2006.01) Patentstyret (21) Oversettelse publisert 2013.08.19 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2272978 B1 (19) NO NORGE (51) Int Cl. C12Q 1/68 (2006.01) Patentstyret (21) Oversettelse publisert 2012.08.13 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2272978 B1 (19) NO NORGE (51) Int Cl. C12Q 1/68 (2006.01) Patentstyret (21) Oversettelse publisert 2012.08.13 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2244923 B1 (19) NO NORGE (1) Int Cl. B61K 9/ (2006.01) Patentstyret (21) Oversettelse publisert 2013.09.30 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2244923 B1 (19) NO NORGE (1) Int Cl. B61K 9/ (2006.01) Patentstyret (21) Oversettelse publisert 2013.09.30 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2147876 B1 (19) NO NORGE (1) Int Cl. B6G 21/20 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02. (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2147876 B1 (19) NO NORGE (1) Int Cl. B6G 21/20 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02. (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 222 B1 (19) NO NORGE (1) Int Cl. F16F 1/376 (06.01) F16F 1/373 (06.01) F16F 1/08 (06.01) Patentstyret (21) Oversettelse publisert 13.02.18 (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 222 B1 (19) NO NORGE (1) Int Cl. F16F 1/376 (06.01) F16F 1/373 (06.01) F16F 1/08 (06.01) Patentstyret (21) Oversettelse publisert 13.02.18 (80) Dato
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 9863 B1 (19) NO NORGE (1) Int Cl. E04B 2/96 (06.01) Patentstyret (21) Oversettelse publisert 13.09.09 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 9863 B1 (19) NO NORGE (1) Int Cl. E04B 2/96 (06.01) Patentstyret (21) Oversettelse publisert 13.09.09 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2216387 B1 (19) NO NORGE (51) Int Cl. C10L 5/44 (2006.01) C10L 5/14 (2006.01) C10L 5/36 (2006.01) Patentstyret (21) Oversettelse publisert 2013.05.06
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2216387 B1 (19) NO NORGE (51) Int Cl. C10L 5/44 (2006.01) C10L 5/14 (2006.01) C10L 5/36 (2006.01) Patentstyret (21) Oversettelse publisert 2013.05.06
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 22473 B1 (19) NO NORGE (1) Int Cl. H01H 23/02 (06.01) Patentstyret (21) Oversettelse publisert 1.0.04 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 22473 B1 (19) NO NORGE (1) Int Cl. H01H 23/02 (06.01) Patentstyret (21) Oversettelse publisert 1.0.04 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 22799 B1 (19) NO NORGE (1) Int Cl. A61K 31/23 (06.01) A61K 31/047 (06.01) A61K 31/231 (06.01) A61K 31/232 (06.01) A61K 31/3 (06.01) A61K 31/93 (06.01)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 22799 B1 (19) NO NORGE (1) Int Cl. A61K 31/23 (06.01) A61K 31/047 (06.01) A61K 31/231 (06.01) A61K 31/232 (06.01) A61K 31/3 (06.01) A61K 31/93 (06.01)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 88493 B1 (19) NO NORGE (1) Int Cl. G06F 1/00 (06.01) H01L 23/34 (06.01) G06F 1/ (06.01) Patentstyret (21) Oversettelse publisert 13.04.22 (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 88493 B1 (19) NO NORGE (1) Int Cl. G06F 1/00 (06.01) H01L 23/34 (06.01) G06F 1/ (06.01) Patentstyret (21) Oversettelse publisert 13.04.22 (80) Dato
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2146022 B1 (19) NO NORGE (1) Int Cl. E04F /06 (2006.01) Patentstyret (21) Oversettelse publisert 2014.11.03 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2146022 B1 (19) NO NORGE (1) Int Cl. E04F /06 (2006.01) Patentstyret (21) Oversettelse publisert 2014.11.03 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2231500 B1 (19) NO NORGE (51) Int Cl. B66F 9/00 (2006.01) B60P 1/02 (2006.01) B60P 3/022 (2006.01) B62B 3/065 (2006.01) B66D 1/00 (2006.01) B66F 9/06
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2231500 B1 (19) NO NORGE (51) Int Cl. B66F 9/00 (2006.01) B60P 1/02 (2006.01) B60P 3/022 (2006.01) B62B 3/065 (2006.01) B66D 1/00 (2006.01) B66F 9/06
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2285808 B1 (19) NO NORGE (51) Int Cl. C07D 471/20 (2006.01) A61K 31/407 (2006.01) A61K 31/424 (2006.01) A61K 31/437 (2006.01) A61K 31/438 (2006.01)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2285808 B1 (19) NO NORGE (51) Int Cl. C07D 471/20 (2006.01) A61K 31/407 (2006.01) A61K 31/424 (2006.01) A61K 31/437 (2006.01) A61K 31/438 (2006.01)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2636033 B1 (19) NO NORGE (51) Int Cl. Patentstyret G09B 23/28 (2006.01) G09B 23/30 (2006.01) (21) Oversettelse publisert 2015.11.09 (80) Dato for
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2636033 B1 (19) NO NORGE (51) Int Cl. Patentstyret G09B 23/28 (2006.01) G09B 23/30 (2006.01) (21) Oversettelse publisert 2015.11.09 (80) Dato for
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 7044 B1 (19) NO NORGE (1) Int Cl. A61K 36/18 (06.01) A61K 33/04 (06.01) A61K 33/18 (06.01) A61K 33/ (06.01) A61K 36/22 (06.01) A61K 36/28 (06.01)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 7044 B1 (19) NO NORGE (1) Int Cl. A61K 36/18 (06.01) A61K 33/04 (06.01) A61K 33/18 (06.01) A61K 33/ (06.01) A61K 36/22 (06.01) A61K 36/28 (06.01)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2231428 B1 (19) NO NORGE (1) Int Cl. B60H 1/32 (06.01) Patentstyret (21) Oversettelse publisert 12.11.26 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2231428 B1 (19) NO NORGE (1) Int Cl. B60H 1/32 (06.01) Patentstyret (21) Oversettelse publisert 12.11.26 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") 1 3 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2207775 B1 (19) NO NORGE (51) Int Cl. C07D 401/12 (2006.01) A61K 31/5377 (2006.01) A61P 3/06 (2006.01) C07D 401/14 (2006.01) C07D 413/14 (2006.01)
1 3 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2207775 B1 (19) NO NORGE (51) Int Cl. C07D 401/12 (2006.01) A61K 31/5377 (2006.01) A61P 3/06 (2006.01) C07D 401/14 (2006.01) C07D 413/14 (2006.01)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 22619 B1 (19) NO NORGE (1) Int Cl. B21D 1/4 (2006.01) B21K 21/04 (2006.01) F42B /02 (2006.01) F42B /188 (2006.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift (11) NO/EP 22619 B1 (19) NO NORGE (1) Int Cl. B21D 1/4 (2006.01) B21K 21/04 (2006.01) F42B /02 (2006.01) F42B /188 (2006.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2082973 B1 (19) NO NORGE (1) Int Cl. B6D 81/34 (2006.01) Patentstyret (21) Oversettelse publisert 2014.06.02 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2082973 B1 (19) NO NORGE (1) Int Cl. B6D 81/34 (2006.01) Patentstyret (21) Oversettelse publisert 2014.06.02 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2246634 B1 (19) NO NORGE (1) Int Cl. F24F 11/02 (2006.01) F24F 3/044 (2006.01) F24F 11/00 (2006.01) F24F 13/04 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2246634 B1 (19) NO NORGE (1) Int Cl. F24F 11/02 (2006.01) F24F 3/044 (2006.01) F24F 11/00 (2006.01) F24F 13/04 (2006.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 261673 B1 (19) NO NORGE (1) Int Cl. B60H 1/32 (06.01) B60H 1/00 (06.01) Patentstyret (21) Oversettelse publisert 1.01.12 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 261673 B1 (19) NO NORGE (1) Int Cl. B60H 1/32 (06.01) B60H 1/00 (06.01) Patentstyret (21) Oversettelse publisert 1.01.12 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2213923 B1 (19) NO NORGE (1) Int Cl. F16L 19/02 (06.01) F16L 19/028 (06.01) Patentstyret (21) Oversettelse publisert 14.01.27 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2213923 B1 (19) NO NORGE (1) Int Cl. F16L 19/02 (06.01) F16L 19/028 (06.01) Patentstyret (21) Oversettelse publisert 14.01.27 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 246764 B1 (19) NO NORGE (1) Int Cl. F2C 3/04 (06.01) Patentstyret (21) Oversettelse publisert 14.01.13 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 246764 B1 (19) NO NORGE (1) Int Cl. F2C 3/04 (06.01) Patentstyret (21) Oversettelse publisert 14.01.13 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2217383 B1 (19) NO NORGE (1) Int Cl. B0B 12/00 (06.01) B0B 11/00 (06.01) G01F 11/02 (06.01) G01F 1/07 (06.01) G07C 3/04 (06.01) Patentstyret (21)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2217383 B1 (19) NO NORGE (1) Int Cl. B0B 12/00 (06.01) B0B 11/00 (06.01) G01F 11/02 (06.01) G01F 1/07 (06.01) G07C 3/04 (06.01) Patentstyret (21)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 211333 B1 (19) NO NORGE (1) Int Cl. B28B 7/00 (06.01) Patentstyret (21) Oversettelse publisert 13.04.08 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 211333 B1 (19) NO NORGE (1) Int Cl. B28B 7/00 (06.01) Patentstyret (21) Oversettelse publisert 13.04.08 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 238426 B1 (19) NO NORGE (1) Int Cl. G01S 1/68 (06.01) B63C 9/32 (06.01) F41B 13/00 (06.01) F41B 1/00 (06.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift (11) NO/EP 238426 B1 (19) NO NORGE (1) Int Cl. G01S 1/68 (06.01) B63C 9/32 (06.01) F41B 13/00 (06.01) F41B 1/00 (06.01) Patentstyret (21) Oversettelse publisert
(86) Europeisk innleveringsdag
 Europeisk innleveringsdag") (12) Oversettelse av europeisk patentskrift (11) NO/EP 297978 B1 (19) NO NORGE (1) Int Cl. A41B 9/02 (06.01) Patentstyret (21) Oversettelse publisert 14.03.17 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 297978 B1 (19) NO NORGE (1) Int Cl. A41B 9/02 (06.01) Patentstyret (21) Oversettelse publisert 14.03.17 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 20789 B1 (19) NO NORGE (1) Int Cl. B61D 1/00 (06.01) B61D 17/ (06.01) B61D 23/00 (06.01) Patentstyret (21) Oversettelse publisert 12.06.04 (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 20789 B1 (19) NO NORGE (1) Int Cl. B61D 1/00 (06.01) B61D 17/ (06.01) B61D 23/00 (06.01) Patentstyret (21) Oversettelse publisert 12.06.04 (80) Dato
(12) Oversettelse av europeisk patentskrift. Avviker fra Patent B1 etter innsigelse
 Oversettelse av europeisk patentskrift. Avviker fra Patent B1 etter innsigelse") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2175588 B2 (19) NO NORGE (51) Int Cl. H04L 12/14 (2006.01) H04L 29/08 (2006.01) Patentstyret Avviker fra Patent B1 etter innsigelse (21) Oversettelse
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2175588 B2 (19) NO NORGE (51) Int Cl. H04L 12/14 (2006.01) H04L 29/08 (2006.01) Patentstyret Avviker fra Patent B1 etter innsigelse (21) Oversettelse
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 21976 B1 (19) NO NORGE (1) Int Cl. F24J 2/1 (06.01) F16L 11/22 (06.01) F16L 9/14 (06.01) F16L 9/13 (06.01) F24J 2/46 (06.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift (11) NO/EP 21976 B1 (19) NO NORGE (1) Int Cl. F24J 2/1 (06.01) F16L 11/22 (06.01) F16L 9/14 (06.01) F16L 9/13 (06.01) F24J 2/46 (06.01) Patentstyret (21) Oversettelse
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 22670 B1 (19) NO NORGE (1) Int Cl. H02G 3/04 (06.01) Patentstyret (21) Oversettelse publisert 1.07.13 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 22670 B1 (19) NO NORGE (1) Int Cl. H02G 3/04 (06.01) Patentstyret (21) Oversettelse publisert 1.07.13 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2233844 B1 (19) NO NORGE (1) Int Cl. F24D 3/ (06.01) Patentstyret (21) Oversettelse publisert 14.12.1 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2233844 B1 (19) NO NORGE (1) Int Cl. F24D 3/ (06.01) Patentstyret (21) Oversettelse publisert 14.12.1 (80) Dato for Den Europeiske Patentmyndighets
europeisk patentskrift
 (12) Oversettelse av europeisk patentskrift (11) NO/EP 2404809 B1 (19) NO NORGE (1) Int Cl. B62D 21/02 (2006.01) Patentstyret (21) Oversettelse publisert 2013.07.22 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2404809 B1 (19) NO NORGE (1) Int Cl. B62D 21/02 (2006.01) Patentstyret (21) Oversettelse publisert 2013.07.22 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2012637 B1 NORGE (19) NO (1) Int Cl. A47K 13/00 (2006.01) Patentstyret (4) Oversettelse publisert: 20.08.09 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2012637 B1 NORGE (19) NO (1) Int Cl. A47K 13/00 (2006.01) Patentstyret (4) Oversettelse publisert: 20.08.09 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2300839 B1 (19) NO NORGE (1) Int Cl. G01R 31/34 (06.01) G01R 31/12 (06.01) Patentstyret (21) Oversettelse publisert 13.01.28 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2300839 B1 (19) NO NORGE (1) Int Cl. G01R 31/34 (06.01) G01R 31/12 (06.01) Patentstyret (21) Oversettelse publisert 13.01.28 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2219 B1 (19) NO NORGE (1) Int Cl. H04K 3/00 (06.01) Patentstyret (21) Oversettelse publisert 13.12.23 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2219 B1 (19) NO NORGE (1) Int Cl. H04K 3/00 (06.01) Patentstyret (21) Oversettelse publisert 13.12.23 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2148223 B1 (19) NO NORGE (1) Int Cl. G01V 3/ (06.01) G01V 3/24 (06.01) Patentstyret (21) Oversettelse publisert 13.03.04 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2148223 B1 (19) NO NORGE (1) Int Cl. G01V 3/ (06.01) G01V 3/24 (06.01) Patentstyret (21) Oversettelse publisert 13.03.04 (80) Dato for Den Europeiske
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 0693 B1 (19) NO NORGE (1) Int Cl. B6D 88/02 (06.01) B6D 88/12 (06.01) B6D 90/00 (06.01) Patentstyret (21) Oversettelse publisert 14.0.0 (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 0693 B1 (19) NO NORGE (1) Int Cl. B6D 88/02 (06.01) B6D 88/12 (06.01) B6D 90/00 (06.01) Patentstyret (21) Oversettelse publisert 14.0.0 (80) Dato
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2216871 B1 (19) NO NORGE (51) Int Cl. H02J 7/00 (2006.01) H01R 13/22 (2006.01) H01R 13/62 (2006.01) Patentstyret (21) Oversettelse publisert 2014.09.08
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2216871 B1 (19) NO NORGE (51) Int Cl. H02J 7/00 (2006.01) H01R 13/22 (2006.01) H01R 13/62 (2006.01) Patentstyret (21) Oversettelse publisert 2014.09.08
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2113323 B1 (19) NO NORGE (1) Int Cl. B23B 31/02 (2006.01) B23B 31/20 (2006.01) Patentstyret (21) Oversettelse publisert 2012.11.19 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2113323 B1 (19) NO NORGE (1) Int Cl. B23B 31/02 (2006.01) B23B 31/20 (2006.01) Patentstyret (21) Oversettelse publisert 2012.11.19 (80) Dato for Den
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2141 B1 (19) NO NORGE (1) Int Cl. B63B 7/08 (2006.01) B63B 21/00 (2006.01) B63B 21/0 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02.17
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2141 B1 (19) NO NORGE (1) Int Cl. B63B 7/08 (2006.01) B63B 21/00 (2006.01) B63B 21/0 (2006.01) Patentstyret (21) Oversettelse publisert 2014.02.17
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") NO/EP28769 (12) Oversettelse av europeisk patentskrift (11) NO/EP 28769 B1 (19) NO NORGE (1) Int Cl. F17D 1/18 (06.01) F16L 3/00 (06.01) Patentstyret (21) Oversettelse publisert 1.04. (80) Dato for Den
NO/EP28769 (12) Oversettelse av europeisk patentskrift (11) NO/EP 28769 B1 (19) NO NORGE (1) Int Cl. F17D 1/18 (06.01) F16L 3/00 (06.01) Patentstyret (21) Oversettelse publisert 1.04. (80) Dato for Den
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2093737 B1 (19) NO NORGE (51) Int Cl. G08B 29/06 (2006.01) G08B 29/12 (2006.01) Patentstyret (21) Oversettelse publisert 2014.03.10 (80) Dato for
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2093737 B1 (19) NO NORGE (51) Int Cl. G08B 29/06 (2006.01) G08B 29/12 (2006.01) Patentstyret (21) Oversettelse publisert 2014.03.10 (80) Dato for
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 08940 B1 (19) NO NORGE (1) Int Cl. B6D 2/2 (06.01) A47G 19/34 (06.01) B6D 83/06 (06.01) G01F 11/26 (06.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift (11) NO/EP 08940 B1 (19) NO NORGE (1) Int Cl. B6D 2/2 (06.01) A47G 19/34 (06.01) B6D 83/06 (06.01) G01F 11/26 (06.01) Patentstyret (21) Oversettelse publisert
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2133645 B1 (19) NO NORGE (51) Int Cl. F41A 3/42 (2006.01) Patentstyret (21) Oversettelse publisert 2015.02.16 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2133645 B1 (19) NO NORGE (51) Int Cl. F41A 3/42 (2006.01) Patentstyret (21) Oversettelse publisert 2015.02.16 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 230294 B1 (19) NO NORGE (1) Int Cl. F02M /00 (06.01) B60K 1/01 (06.01) F02D 19/06 (06.01) F02M 21/02 (06.01) F02M 37/00 (06.01) F02M 43/00 (06.01)
(12) Oversettelse av europeisk patentskrift (11) NO/EP 230294 B1 (19) NO NORGE (1) Int Cl. F02M /00 (06.01) B60K 1/01 (06.01) F02D 19/06 (06.01) F02M 21/02 (06.01) F02M 37/00 (06.01) F02M 43/00 (06.01)
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2497702 B1 (19) NO NORGE (1) Int Cl. B62H 3/02 (06.01) B62H /00 (06.01) B62M 6/80 (.01) Patentstyret (21) Oversettelse publisert 1.03.16 (80) Dato
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2497702 B1 (19) NO NORGE (1) Int Cl. B62H 3/02 (06.01) B62H /00 (06.01) B62M 6/80 (.01) Patentstyret (21) Oversettelse publisert 1.03.16 (80) Dato
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2404358 B1 (19) NO NORGE (51) Int Cl. B60L 3/12 (2006.01) H02J 7/00 (2006.01) B60L 11/18 (2006.01) Patentstyret (21) Oversettelse publisert 2015.02.16
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2404358 B1 (19) NO NORGE (51) Int Cl. B60L 3/12 (2006.01) H02J 7/00 (2006.01) B60L 11/18 (2006.01) Patentstyret (21) Oversettelse publisert 2015.02.16
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 23196 B1 (19) NO NORGE (1) Int Cl. A01M 7/00 (06.01) Patentstyret (21) Oversettelse publisert 13.08.19 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 23196 B1 (19) NO NORGE (1) Int Cl. A01M 7/00 (06.01) Patentstyret (21) Oversettelse publisert 13.08.19 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") NO/EP918 (12) Oversettelse av europeisk patentskrift (11) NO/EP 918 B1 (19) NO NORGE (1) Int Cl. H02J 7/00 (06.01) Patentstyret (21) Oversettelse publisert 14.02.03 (80) Dato for Den Europeiske Patentmyndighets
NO/EP918 (12) Oversettelse av europeisk patentskrift (11) NO/EP 918 B1 (19) NO NORGE (1) Int Cl. H02J 7/00 (06.01) Patentstyret (21) Oversettelse publisert 14.02.03 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift
 Oversettelse av europeisk patentskrift") (12) Oversettelse av europeisk patentskrift (11) NO/EP 2252286 B1 (19) NO NORGE (51) Int Cl. A61K 31/357 (2006.01) Patentstyret (21) Oversettelse publisert 2012.01.16 (80) Dato for Den Europeiske Patentmyndighets
(12) Oversettelse av europeisk patentskrift (11) NO/EP 2252286 B1 (19) NO NORGE (51) Int Cl. A61K 31/357 (2006.01) Patentstyret (21) Oversettelse publisert 2012.01.16 (80) Dato for Den Europeiske Patentmyndighets