Lab 1 Kamerageometri med Eigen
|
|
|
- Borgar Arnesen
- 6 år siden
- Visninger:
Transkript
1 Lab 1 Kamerageometri med Eigen
2 Del 1: Introduksjon til Eigen 2


3 Eigen 3 C++ bibliotek for lineær algebra «Template bibliotek» «Header only» Flerplatform, Ingen linking! Godt dokumentert! TutorialMatrixClass.html 3
4 Bli kjent med Eigen Lag deg noen vektorer og matriser tt = AA = II = TT = AA tt 0 1 BB = AA TT 4
5 Bli kjent med Eigen Lek litt med koeffisientindeksering tt = Sett til 2.0 AA =
6 Bli kjent med Eigen Blokkoperasjoner Lag en vektor fra en rad i AA = Lag en vektor fra en kolonne i AA = Lag en matrise fra den midterste 2x2 submatrisen i TT Hva skjer med AA og TT om dere endrer disse vektorene/matrisene? 6
7 Bli kjent med Eigen Matrise- og vektoraritmetikk Legg to vektorer/matriser sammen Multipliser to matriser sammen Ta prikkproduktet av to vektorer Ta kryssproduktet av to vektorer Ta koeffisientvis multiplikasjon mellom to matriser 7
8 Bli kjent med Eigen Reduksjonsoperasjoner Ta summen av alle koeffisientene i en matrise Beregn minimumsverdien i en matrise Finn posisjonen til denne koeffisienten Lag en vektor som gir minimumsverdien i hver kolonne i en matrise Finn L1- og L2-normen til en vektor Finn antall koeffisienter i en matrise som er større enn en gitt verdi 8
9 Bli kjent med Eigen Mer avansert bruk Ta en titt på Map TutorialMapClass.html Lag en std::vector med tall, og bruk dette minnet som en Eigen matrise Ta en titt på select() 1e1bf e5d21a489f98 Lek litt med lineær algebra DenseLinearSolvers chapter.html 9
10 Del 2 Kamerageometri 10
11 Pose Posen til BB relativt til AA kan representeres med en projektiv transformatsjon AATT BB SSSS 3 Egenskaper ξ T A A R t = 0 1 A A B B B B p= ξ p p = T p A A B A A B B B A A B A A B ξc = ξb ξc TC = TB TC A A 1 ξb TB


12 Pose En av egenskapene til pose er å transformere punkter (husk homogen representasjon) p = T A A B B p A B x x A A A B y RB t B y = A B z 0 1 z 1 1


13 Euler vinklene yaw, pitch, roll Euler vinkler brukes gjerne til å beskrive hvordan et referansesystem er orientert relativt til et annet Mange alternativer f.eks yaw-pitch-roll From
14 Euler vinklene yaw, pitch, roll Yaw = Rotasjon mot klokka en vinkel αα om z-aksen Pitch = Rotasjon mot klokka en vinkel ββ om y-aksen Roll = Rotasjon mot klokka en vinkel γγ om z-aksen cos β 0 sin β cosα sinα 0 Rx( γ) = 0 cosγ sinγ Ry( β) = Rz( α) = sinα cosα 0 0 sinγ cosγ sin β 0 cos β Orienteringen til body-frame BB relativt til en referanse-frame WW W ( αβγ,, ) = ( α) ( β) ( γ) R R R R B z y x cosαcos β cosαsin βsinγ sinαcosγ cosαsin βcosγ + sinαsinγ = sinαcos β sinαsin βsinγ + cosαcosγ sinαsin βcosγ cosαsinγ sin β cos βsinγ cos βcosγ
15 Problem
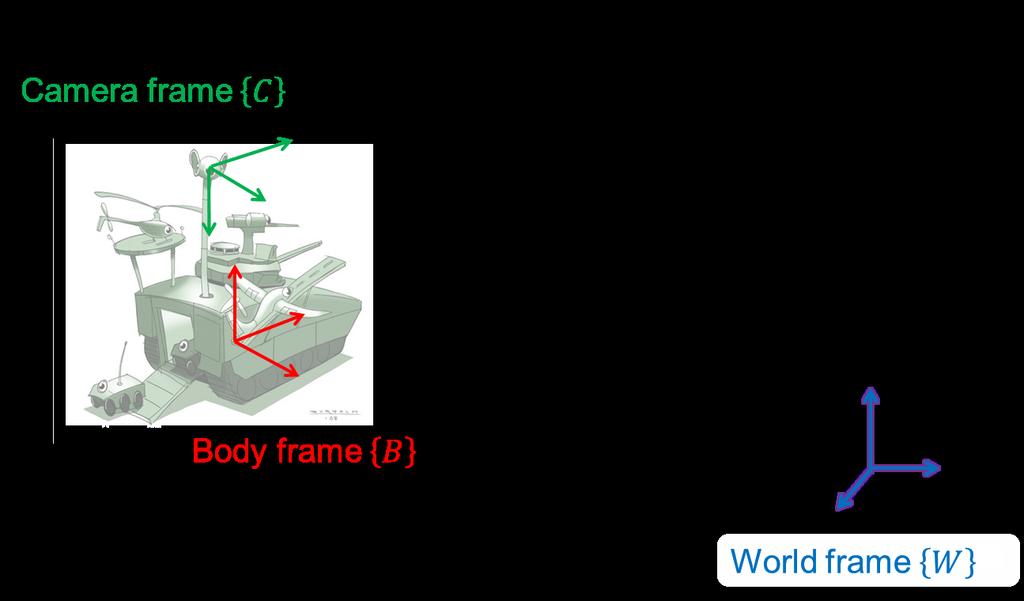
16 Det vi vet om BB Kjøretøyet er 6m langt, 3m bredt og 2m høyt. Body frame BB er plassert i sentrum av kjøretøyet med Body x-aksen peker fremover Body y-aksen peker til venstr Body z-aksen peker oppover Pose til BB relative til WW er gitt ved xx = 15.0mm yy = 10.0mm zz = 1.5mm yaaaa = rrrrrrrr = 0.0 ppppppppp = 0.0
17 Det vi vet om CC Kameraet står fast på kjøretøyet Kamera framen CC er som vanlig Kamera x-aksen peker til høyre Kamera y-aksen peker nedover Kamera z-aksen peker fremover Pose til CC relativt til BB er gitt ved xx = Half of vehicle length yy = 0.0 zz = Half of vehicle height yaaaa = 90.0 ppppppppp = 0.0 rrrrrrrr = 90.0 The camera captures images with rrrrrrrr = 120 cccccccc = 160 The camera intrinsics are known ff uu = 80 ff vv = ff uu ss = 0 cc uu = cccccccc/2 cc vv = rrrrrrrr/2
18 Hvordan løse problemet Bruk perspektiv kamera modellen til å projisere punktene inn i bildet WW uu = PP XX WW uu = KK RR tt XX ff uu ss cc uu WW uu = 0 ff vv cc vv RR tt XX Husk at RR tt 00 1 = CC TT WW 1 WW = TT CC WW Bestem TT CC ut fra de angitte posene WW WW BB TT CC = TT BB TT CC WW Bestem TT BB ut fra beskrivelsen av pose til til BB relative til WW BB Bestem TT CC ut fra beskrivelsen av pose til til CC relative til BB Beregn kameramatrisen P = KK RR tt og bruk den til å projisere verdenspunkter inn i bildet
19 Hvordan løse problemet Tips Rotasjonsmatrisen RR xx γγ kan genereres ved Eigen::AngleAxisd( γγ * M_PI / 180, Eigen::Vector3d::UnitX()) Rotasjonsmatrisen RR yy ββ kan genereres ved Eigen::AngleAxisd( ββ * M_PI / 180, Eigen::Vector3d::UnitY()) Rotasjonsmatrisen RR zz αα kan genereres ved Eigen::AngleAxisd( αα * M_PI / 180, Eigen::Vector3d::UnitZ()) BB Represent the pose of CC relative to BB by a Euclidean projective transformation TT CC WW Compute the pose of CC relative to WW as TT CC Compute the camera matrix P = KK RR tt and use it to project points into the image
Halvårsplan/årsplan i norsk for 1. trinn 2015/2016
 Halvårsplan/årsplan i norsk for 1. trinn 2015/2016 Uke Læremiddel sider V F L 33 35 37 38 Kan leke, improvisere og eksperimentere med rim og rytme BOKSTAVTEST eksperimentere med rim, rytme og språker språker
Halvårsplan/årsplan i norsk for 1. trinn 2015/2016 Uke Læremiddel sider V F L 33 35 37 38 Kan leke, improvisere og eksperimentere med rim og rytme BOKSTAVTEST eksperimentere med rim, rytme og språker språker
Uke Emne Kompetansemål Læringsmål Arbeidsmetode Læremidler Evaluering/ Vurdering Dette blir som en innholdsfortegnelse. Emne/Tema
 FAGPLAN: Norsk TRINN: 1. trinn 2019/20 - høst Uke Emne Kompetansemål Læringsmål Arbeidsmetode Læremidler Evaluering/ Vurdering Dette blir som en innholdsfortegnelse. Emne/Tema Finn riktig mål fra kunnskapsløftet:
FAGPLAN: Norsk TRINN: 1. trinn 2019/20 - høst Uke Emne Kompetansemål Læringsmål Arbeidsmetode Læremidler Evaluering/ Vurdering Dette blir som en innholdsfortegnelse. Emne/Tema Finn riktig mål fra kunnskapsløftet:
Oppgave 1 (25 %) - Flervalgsoppgaver
 - Flervalgsoppgaver") Oppgaver og løsningsforslag for 4t eksamen 10.mai 006 i LO510D Lineær algebra med grafiske anvendelser. Fra og med oppgave skal alle svar begrunnes. Oppgave 1 (5 %) - Flervalgsoppgaver Denne oppgaven består
Oppgaver og løsningsforslag for 4t eksamen 10.mai 006 i LO510D Lineær algebra med grafiske anvendelser. Fra og med oppgave skal alle svar begrunnes. Oppgave 1 (5 %) - Flervalgsoppgaver Denne oppgaven består
UNIK 4690 Maskinsyn Introduksjon
 UNIK 4690 Maskinsyn Introduksjon 19.01.2017 Trym Vegard Haavardsholm ([email protected]) Idar Dyrdal ([email protected]) Thomas Opsahl ([email protected]) Ragnar Smestad ([email protected]) Maskinsyn
UNIK 4690 Maskinsyn Introduksjon 19.01.2017 Trym Vegard Haavardsholm ([email protected]) Idar Dyrdal ([email protected]) Thomas Opsahl ([email protected]) Ragnar Smestad ([email protected]) Maskinsyn
Eksamen, Matematikk forkurs, 24. mai 2017 LØSNINGSFORSLAG
 Side av Eksamen, Matematikk forkurs,. mai 7 LØSNINGSFORSLAG Oppgave a) Forenkle uttrykket så mye som mulig: aa aa aa = aa aa 6 aa aa aa = aa + 6 = aa 9 6 + 6 6 6 = aa 6 6 = aa 6 b) Løs ulikheten: xx +
Side av Eksamen, Matematikk forkurs,. mai 7 LØSNINGSFORSLAG Oppgave a) Forenkle uttrykket så mye som mulig: aa aa aa = aa aa 6 aa aa aa = aa + 6 = aa 9 6 + 6 6 6 = aa 6 6 = aa 6 b) Løs ulikheten: xx +
Formelsamling til TEK-1011 Anvendt mekanikk
 Formelsamling til TEK-1011 Anvendt mekanikk Trigonometri Rettvinklet trekant Pythagoras: + BB = CC Generell trekant Sinussetningen: sin αα = BB sin ββ = CC sin γγ Cosinussetningen: = BB + CC BBBB cos αα
Formelsamling til TEK-1011 Anvendt mekanikk Trigonometri Rettvinklet trekant Pythagoras: + BB = CC Generell trekant Sinussetningen: sin αα = BB sin ββ = CC sin γγ Cosinussetningen: = BB + CC BBBB cos αα
Oppgaver MAT2500. Fredrik Meyer. 29. august 2014
 Oppgaver MAT500 Fredrik Meyer 9. august 04 Oppgave. Bruk cosinus-setningen til å se at definisjonen av vinkel i planet blir riktig. Løsning. Dette er en litt rar oppgave. Husk at cosinus-setningen sier
Oppgaver MAT500 Fredrik Meyer 9. august 04 Oppgave. Bruk cosinus-setningen til å se at definisjonen av vinkel i planet blir riktig. Løsning. Dette er en litt rar oppgave. Husk at cosinus-setningen sier
Ressurser. OpenCV documentation: Eigen documentation : C++: Image Watch: An image debugger plug-in for Visual Studio
 Lab 2 04.02.2016 Ressurser OpenCV documentation: http://opencv.org/documentation.html Eigen documentation : http://eigen.tuxfamily.org/dox/ Quick reference quide: http://eigen.tuxfamily.org/dox/group QuickRefPage.html
Lab 2 04.02.2016 Ressurser OpenCV documentation: http://opencv.org/documentation.html Eigen documentation : http://eigen.tuxfamily.org/dox/ Quick reference quide: http://eigen.tuxfamily.org/dox/group QuickRefPage.html
MAT1120 Repetisjon Kap. 1
 MAT1120 Repetisjon Kap. 1 Kap. 1, avsn. 2.1-2.3 og kap. 3 i Lays bok er for det meste kjent fra MAT1100 og MAT1110. Idag skal vi repetere fra kap. 1 i Lays bok. Det handler bl.a. om : Matriser Vektorer
MAT1120 Repetisjon Kap. 1 Kap. 1, avsn. 2.1-2.3 og kap. 3 i Lays bok er for det meste kjent fra MAT1100 og MAT1110. Idag skal vi repetere fra kap. 1 i Lays bok. Det handler bl.a. om : Matriser Vektorer
Norskfaget ved Sinnes skule - «Ein raud trå» - mål, metode og vurdering for læring
 LÆREPLAN I NORSK kompetansemål etter 2. trinn MUNNLEG KOMMUNIKASJON - Mål for opplæringa er at eleven skal kunna: Lytta, ta ordet etter tur og gje respons til andre i samtalar Lytta til tekstar på bokmål
LÆREPLAN I NORSK kompetansemål etter 2. trinn MUNNLEG KOMMUNIKASJON - Mål for opplæringa er at eleven skal kunna: Lytta, ta ordet etter tur og gje respons til andre i samtalar Lytta til tekstar på bokmål
Uke Bokstav + begrep 34 Spore og tegne
 Uke Bokstav + begrep 34 Spore og tegne 35 Begrep: Linjer og vinkler, bue, sirkel, trekant, firkant Bokstav: Ii + Ss Is, saltstenger Begrep: Over, under, på, bak, foran, ved siden av 36 Bokstav: Oo + Ll
Uke Bokstav + begrep 34 Spore og tegne 35 Begrep: Linjer og vinkler, bue, sirkel, trekant, firkant Bokstav: Ii + Ss Is, saltstenger Begrep: Over, under, på, bak, foran, ved siden av 36 Bokstav: Oo + Ll
5.5.1 Bruk matriseregning til å vise at en rotasjon er produktet av to speilinger. Løsningsforslag + + = =
 til oppgavene i avsnitt 55 til oppgaver i avsnitt 55 551 Bruk matriseregning til å vise at en rotasjon er produktet av to speilinger cos( u + v) sin( u + v) cosu sin u u+ v u = sin( u v) cos( u v) sin
til oppgavene i avsnitt 55 til oppgaver i avsnitt 55 551 Bruk matriseregning til å vise at en rotasjon er produktet av to speilinger cos( u + v) sin( u + v) cosu sin u u+ v u = sin( u v) cos( u v) sin
Årsplan i norsk høst 1.trinn 2016 Uke/Tema Hovedområde Kunnskapsløftet Innhold
 Årsplan i norsk høst 1.trinn 2016 Uke/Tema Hovedområde Kunnskapsløftet Innhold Uke 33-35 Vennskap Bli kjent, skape et godt klassemiljø Kompetansemål etter 2.trinn Kunne uttrykke egne følelser og meninger
Årsplan i norsk høst 1.trinn 2016 Uke/Tema Hovedområde Kunnskapsløftet Innhold Uke 33-35 Vennskap Bli kjent, skape et godt klassemiljø Kompetansemål etter 2.trinn Kunne uttrykke egne følelser og meninger
EKSAMENSOPPGAVE. Tillatte hjelpemidler: Kalkulator Pedersen et al. Teknisk formelsamling med tabeller.
 EKSAMENSOPPGAVE Eksamen i: TEK-1011, Anvendt mekanikk Dato: Tirsdag 19.5.2015 Tid: Kl. 09:00 13:00 Sted: Åsgårdvegen 9 Tillatte hjelpemidler: Kalkulator Pedersen et al. Teknisk formelsamling med tabeller.
EKSAMENSOPPGAVE Eksamen i: TEK-1011, Anvendt mekanikk Dato: Tirsdag 19.5.2015 Tid: Kl. 09:00 13:00 Sted: Åsgårdvegen 9 Tillatte hjelpemidler: Kalkulator Pedersen et al. Teknisk formelsamling med tabeller.
Løsning av utvalgte øvingsoppgaver til Sigma R2 kapittel 2
 Løsning av utvalgte øvingsoppgaver til Sigma R kapittel B. a Da ABC er 90, blir AC + 8. Siden CAE er 90, blir CE + 8 7. b Vinkelen mellom CE og grunnflata blir vinkel ACE. tan ACE som gir at vinkelen blir
Løsning av utvalgte øvingsoppgaver til Sigma R kapittel B. a Da ABC er 90, blir AC + 8. Siden CAE er 90, blir CE + 8 7. b Vinkelen mellom CE og grunnflata blir vinkel ACE. tan ACE som gir at vinkelen blir
MA1102 Grunnkurs i analyse II Vår 2019
 Norges teknisk naturvitenskapelige universitet Institutt for matematiske fag MA1102 Grunnkurs i analyse II Vår 2019 10.2.27 a) Vi skal vise at u + v 2 = u 2 + 2u v + v 2. (1) Som boka nevner på side 581,
Norges teknisk naturvitenskapelige universitet Institutt for matematiske fag MA1102 Grunnkurs i analyse II Vår 2019 10.2.27 a) Vi skal vise at u + v 2 = u 2 + 2u v + v 2. (1) Som boka nevner på side 581,
ÅRSPLAN Arbeidsmåter ( forelesing, individuelt elevarbeid, gruppearbeid, forsøk, ekskursjoner )
") Øyslebø oppvekstsenter ÅRSPLAN 2016-2017 Fag: Norsk Trinn: 1 Lærer: Gerd Undheim Reinertsen og Ina Haugland Tidsrom (Datoer/ ukenr, perioder..) Tema Lærestoff / læremidler (lærebok kap./ s, bøker, filmer,
Øyslebø oppvekstsenter ÅRSPLAN 2016-2017 Fag: Norsk Trinn: 1 Lærer: Gerd Undheim Reinertsen og Ina Haugland Tidsrom (Datoer/ ukenr, perioder..) Tema Lærestoff / læremidler (lærebok kap./ s, bøker, filmer,
Anvendt Robotteknikk Konte Sommer 2019 EKSAMEN HARIS JASAREVIC
 2019 Anvendt Robotteknikk Konte Sommer 2019 EKSAMEN HARIS JASAREVIC Innhold Oppgaver... 2 Oppgave 1... 2 Oppgave 2... 2 Oppgave 3... 2 Oppgave 4... 2 Oppgave 5... 3 Oppgave 6... 4 Oppgave 7... 5 Oppgave
2019 Anvendt Robotteknikk Konte Sommer 2019 EKSAMEN HARIS JASAREVIC Innhold Oppgaver... 2 Oppgave 1... 2 Oppgave 2... 2 Oppgave 3... 2 Oppgave 4... 2 Oppgave 5... 3 Oppgave 6... 4 Oppgave 7... 5 Oppgave
Presentasjonsdokument
 Presentasjonsdokument Visuell historiefortelling som formidlingsmetode: De helseskadelige kjemikaliene som brukes i hudproduktene våre BOP3102, V17 287730 Problemstilling og resultat Problemstilling: Hvordan
Presentasjonsdokument Visuell historiefortelling som formidlingsmetode: De helseskadelige kjemikaliene som brukes i hudproduktene våre BOP3102, V17 287730 Problemstilling og resultat Problemstilling: Hvordan
Forelesningsnotater SIF8039/ Grafisk databehandling
 Forelesningsnotater SIF839/ Grafisk databehandling Notater til forelesninger over: Kapittel 4: Geometric Objects and ransformations i: Edward Angel: Interactive Computer Graphics Vårsemesteret 22 orbjørn
Forelesningsnotater SIF839/ Grafisk databehandling Notater til forelesninger over: Kapittel 4: Geometric Objects and ransformations i: Edward Angel: Interactive Computer Graphics Vårsemesteret 22 orbjørn
Eksempelsett R2, 2008
 Eksempelsett R, 008 Del Tid: timer Hjelpemidler: Vanlige skrivesaker, passer, linjal med centimetermål og vinkelmåler er tillatt. Oppgave a) Deriver funksjonen f x x cosx f x cosx x s x f x cosx 6x sinx
Eksempelsett R, 008 Del Tid: timer Hjelpemidler: Vanlige skrivesaker, passer, linjal med centimetermål og vinkelmåler er tillatt. Oppgave a) Deriver funksjonen f x x cosx f x cosx x s x f x cosx 6x sinx
RF5100 Lineær algebra Leksjon 12
 RF5100 Lineær algebra Leksjon 12 Lars Sydnes, NITH 26. november 2013 I. GAUSS-ELIMINASJON 2x + 3y + z = 1 2x + 5y z = 1 4x + 7y + 4z = 3 x + 3/2 y + 1/2 z = 1/2 x + 2z = 2 y z = 1 3z = 2 x + 2z = 2 y z
RF5100 Lineær algebra Leksjon 12 Lars Sydnes, NITH 26. november 2013 I. GAUSS-ELIMINASJON 2x + 3y + z = 1 2x + 5y z = 1 4x + 7y + 4z = 3 x + 3/2 y + 1/2 z = 1/2 x + 2z = 2 y z = 1 3z = 2 x + 2z = 2 y z
Del 1. Skisse av reguleringsteknisk system
 Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Øving 1, løsningsforslag v2 Revidert sist Fredrik Dessen 2017-09-07 Del 1. Skisse av reguleringsteknisk system Den såkalte cruisekontrollen
Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Øving 1, løsningsforslag v2 Revidert sist Fredrik Dessen 2017-09-07 Del 1. Skisse av reguleringsteknisk system Den såkalte cruisekontrollen
Uke Kompetansemål Innhold Arbeidsmåter Vurdering Ukas bokstav. Ukas begrep/tema/bok Ukas kanord
 Veiledende årsplan i norsk 1.trinn 2016-2017 Endringer kan forekomme, særlig på bokstavprogresjon. Høsten 2016 Uke Kompetansemål Innhold Arbeidsmåter Vurdering Ukas bokstav Ukas begrep/tema/bok Ukas kanord
Veiledende årsplan i norsk 1.trinn 2016-2017 Endringer kan forekomme, særlig på bokstavprogresjon. Høsten 2016 Uke Kompetansemål Innhold Arbeidsmåter Vurdering Ukas bokstav Ukas begrep/tema/bok Ukas kanord
a) Blir produktet av to vilkårlige oddetall et partall eller et oddetall? Bevis det.
 Blir produktet av to vilkårlige oddetall et partall eller et oddetall? Bevis det.") Prøve i R1 04.1.15 Del 1 Hjelpemidler: vanlige skrivesaker, passer, linjal med centimetermål og vinkelmåler Husk å begrunne alle svar. Det skal gå klart frem av besvarelsen hvordan du har tenkt. Oppgave
Prøve i R1 04.1.15 Del 1 Hjelpemidler: vanlige skrivesaker, passer, linjal med centimetermål og vinkelmåler Husk å begrunne alle svar. Det skal gå klart frem av besvarelsen hvordan du har tenkt. Oppgave
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i INF330 Metoder i grafisk databehandling og diskret geometri Eksamensdag: 3. desember 010 Tid for eksamen: 14.30 18.30 Oppgavesettet
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i INF330 Metoder i grafisk databehandling og diskret geometri Eksamensdag: 3. desember 010 Tid for eksamen: 14.30 18.30 Oppgavesettet
GRAFISK HÅNDBOK. Rødt 2015
 GRAFISK HÅNDBOK Rødt 2015 LOGO VARIANTER Ved sort/hvitt kopering eller trykking skal logoen brukes i sort: Dersom logoen skal legges oppå et bilde eller en farget bakgrunn skal den brukes i hvitt: REGLER
GRAFISK HÅNDBOK Rødt 2015 LOGO VARIANTER Ved sort/hvitt kopering eller trykking skal logoen brukes i sort: Dersom logoen skal legges oppå et bilde eller en farget bakgrunn skal den brukes i hvitt: REGLER
1 Geometri R2 Oppgaver
 1 Geometri R2 Oppgaver Innhold 1.1 Vektorer... 2 1.2 Regning med vektorer... 15 1.3 Vektorer på koordinatform... 19 1.4 Vektorprodukt... 22 1.5 Linjer i rommet... 27 1.6 Plan i rommet... 30 1.7 Kuleflater...
1 Geometri R2 Oppgaver Innhold 1.1 Vektorer... 2 1.2 Regning med vektorer... 15 1.3 Vektorer på koordinatform... 19 1.4 Vektorprodukt... 22 1.5 Linjer i rommet... 27 1.6 Plan i rommet... 30 1.7 Kuleflater...
Statens vegvesen. Rettelser i håndbok V220, 2018-utgaven (utgitt 20. desember 2018)
") Statens vegvesen Notat Til: Fra: Kopi: Geoteknikk- og skredseksjonen Saksbehandler/innvalgsnr: Veslemøy Gardå Vår dato: 25.01.2019 Vår referanse: Rettelser i håndbok V220, 2018-utgaven (utgitt 20. desember
Statens vegvesen Notat Til: Fra: Kopi: Geoteknikk- og skredseksjonen Saksbehandler/innvalgsnr: Veslemøy Gardå Vår dato: 25.01.2019 Vår referanse: Rettelser i håndbok V220, 2018-utgaven (utgitt 20. desember
Løsningsforslag. Oppgave 1 Gitt matrisene ] [ og C = A = 4 1 B = 2 1 3
![Løsningsforslag. Oppgave 1 Gitt matrisene ] [ og C = A = 4 1 B = 2 1 3](/thumbs/55/37240043.jpg "Løsningsforslag. Oppgave 1 Gitt matrisene ] [ og C = A = 4 1 B = 2 1 3") Prøve i Matematikk BYFE DAFE Dato: 27. mai 26 Hjelpemiddel: Kalkulator og formelark Alle svar skal grunngis. Alle deloppgaver har lik vekt. Løsningsforslag Oppgave Gitt matrisene [ 2 A 4 B [ 2 og C [ 2
Prøve i Matematikk BYFE DAFE Dato: 27. mai 26 Hjelpemiddel: Kalkulator og formelark Alle svar skal grunngis. Alle deloppgaver har lik vekt. Løsningsforslag Oppgave Gitt matrisene [ 2 A 4 B [ 2 og C [ 2
Kap. 6 Ortogonalitet og minste kvadrater
 Kap. 6 Ortogonalitet og minste kvadrater IR n er mer enn bare et vektorrom: den har et naturlig indreprodukt, nemlig prikkproduktet av vektorer. Dette indreproduktet gjør det mulig å tenke geometrisk og
Kap. 6 Ortogonalitet og minste kvadrater IR n er mer enn bare et vektorrom: den har et naturlig indreprodukt, nemlig prikkproduktet av vektorer. Dette indreproduktet gjør det mulig å tenke geometrisk og
Plan. I dag. Neste uke
 Plan I dag Referansegruppe... Ta opp igjen kurvelengde Areal bestemt av en kurve En annen måte å beskrive punkt i planet Kurver med denne beskrivelsen Tangenter, kurvelengde og areal Neste uke Kjeglesnitt
Plan I dag Referansegruppe... Ta opp igjen kurvelengde Areal bestemt av en kurve En annen måte å beskrive punkt i planet Kurver med denne beskrivelsen Tangenter, kurvelengde og areal Neste uke Kjeglesnitt
Grafisk profil UTG A R D. Visus og Hugr design, 2013
 UTG A R D Visus og Hugr design, 2013 Innhald Logo 03 15 Fargepalett 16 Typografi 17 Piktogram 18 Skilting 19 22 Tilleggselement 23 Trykksaker 24 27 LOGO 03 Adobe Garamnod Pro Daxline Pro TYPOGRAFI Hovudfonten
UTG A R D Visus og Hugr design, 2013 Innhald Logo 03 15 Fargepalett 16 Typografi 17 Piktogram 18 Skilting 19 22 Tilleggselement 23 Trykksaker 24 27 LOGO 03 Adobe Garamnod Pro Daxline Pro TYPOGRAFI Hovudfonten
Trigonometri, regulære mangekanter og stjerner
 Trigonometri, regulære mangekanter og stjerner Nybegynner Processing Introduksjon Nå som du kan tegne mangekanter (hvis du ikke har gjort leksjonen om mangekanter, bør du gjøre dem først), skal vi se på
Trigonometri, regulære mangekanter og stjerner Nybegynner Processing Introduksjon Nå som du kan tegne mangekanter (hvis du ikke har gjort leksjonen om mangekanter, bør du gjøre dem først), skal vi se på
Nr. 54/137 EØS-tillegget til De Europeiske Fellesskaps Tidende VEDLEGG IV
 Nr. 54/137 EØS-tillegget til De Europeiske Fellesskaps Tidende 23. 11. 2000 VEDLEGG IV GLØDELAMPER BEREGNET PÅ BRUK I TYPEGODKJENTE LYKTER FOR MOPEDER OG MOTOR- SYKLER MED TO OG TRE HJUL Tillegg 1 Glødelamper
Nr. 54/137 EØS-tillegget til De Europeiske Fellesskaps Tidende 23. 11. 2000 VEDLEGG IV GLØDELAMPER BEREGNET PÅ BRUK I TYPEGODKJENTE LYKTER FOR MOPEDER OG MOTOR- SYKLER MED TO OG TRE HJUL Tillegg 1 Glødelamper
LO510D Lin.Alg. m/graf. anv. Våren 2005
 TF Høgskolen i Sør Trøndelag Avdeling for informatikk og e læring LO5D Lin.Alg. m/graf. anv. Våren 5 Løsningsforslag Eksamen a) Setter α = og β = i ligningssystemet og gausseliminerer totalmatrisen til
TF Høgskolen i Sør Trøndelag Avdeling for informatikk og e læring LO5D Lin.Alg. m/graf. anv. Våren 5 Løsningsforslag Eksamen a) Setter α = og β = i ligningssystemet og gausseliminerer totalmatrisen til
EKSAMEN. Informasjon om eksamen. Emnekode og -navn: ITD37018 Anvendt Robotteknikk. Dato og tid: , 3 timer. Faglærer: Haris Jasarevic
 Informasjon om eksamen EKSAMEN Emnekode og -navn: ITD37018 Anvendt Robotteknikk Dato og tid: 10.12.18, 3 timer Faglærer: Haris Jasarevic Hjelpemidler: Ingen hjelpemidler tillatt Om oppgaven: Alle oppgavene
Informasjon om eksamen EKSAMEN Emnekode og -navn: ITD37018 Anvendt Robotteknikk Dato og tid: 10.12.18, 3 timer Faglærer: Haris Jasarevic Hjelpemidler: Ingen hjelpemidler tillatt Om oppgaven: Alle oppgavene
RØYKEN kommune. Grafisk profilmanual. Revidert januar 2016
 Grafisk profilmanual Revidert januar 2016 Logo Hovedlogo Logoen er hovedsignaturen til Røyken. Den består av våpenet og navnetrekket Røyken. Grønn, nær og levende Størrelsesforholdet mellom våpenet og
Grafisk profilmanual Revidert januar 2016 Logo Hovedlogo Logoen er hovedsignaturen til Røyken. Den består av våpenet og navnetrekket Røyken. Grønn, nær og levende Størrelsesforholdet mellom våpenet og
v(t) = r (t) = (2, 2t) v(t) = t 2 T(t) = 1 v(t) v(t) = (1 + t 2 ), t 2 (1 + t 2 ) t = 2(1 + t 2 ) 3/2.
 = r (t) = (2, 2t) v(t) = t 2 T(t) = 1 v(t) v(t) = (1 + t 2 ), t 2 (1 + t 2 ) t = 2(1 + t 2 ) 3/2.") NTNU Institutt for matematiske fag TMA40 Matematikk, øving, vår 0 Løsningsforslag Notasjon og merknader Hvis boken skriver en vektor som ai + bj + ck hender det at jeg skriver den som a, b, c). Jeg benytter
NTNU Institutt for matematiske fag TMA40 Matematikk, øving, vår 0 Løsningsforslag Notasjon og merknader Hvis boken skriver en vektor som ai + bj + ck hender det at jeg skriver den som a, b, c). Jeg benytter
Matematikk 1 Første deleksamen. Løsningsforslag
 HØGSKOLEN I ØSTFOLD, AVDELING FOR INFORMASJONSTEKNOLOGI Matematikk Første deleksamen 4. juni 208 Løsningsforslag Christian F. Heide June 8, 208 OPPGAVE a Forklar kortfattet hva den deriverte av en funksjon
HØGSKOLEN I ØSTFOLD, AVDELING FOR INFORMASJONSTEKNOLOGI Matematikk Første deleksamen 4. juni 208 Løsningsforslag Christian F. Heide June 8, 208 OPPGAVE a Forklar kortfattet hva den deriverte av en funksjon
FASIT OG TIPS til Rinvold: Visuelle perspektiv. Lineær algebra. Caspar forlag, 1.utgave 2003 og 2.opplag 2004.
 FAIT OG TIP til Rinvold: Visuelle perspektiv. Lineær algebra. Caspar forlag,.utgave og.opplag. Versjon..9. Det er ikke tatt med svar på alle oppgaver. Denne fasiten vil bli oppdatert etter hvert. Oppdager
FAIT OG TIP til Rinvold: Visuelle perspektiv. Lineær algebra. Caspar forlag,.utgave og.opplag. Versjon..9. Det er ikke tatt med svar på alle oppgaver. Denne fasiten vil bli oppdatert etter hvert. Oppdager
Litt GRUPPETEORI for Fys4170
 Litt GRUPPETEORI for Fys4170 GRUPPER: Ei gruppe G = {g i } er ei samling element med disse egenskapene: * multiplikasjon slik at g i g j G ; * et enhetselement g 0 = 1 slik at g i g 0 = g 0 g i = g i ;
Litt GRUPPETEORI for Fys4170 GRUPPER: Ei gruppe G = {g i } er ei samling element med disse egenskapene: * multiplikasjon slik at g i g j G ; * et enhetselement g 0 = 1 slik at g i g 0 = g 0 g i = g i ;
Denne labøvelsen gir en videre innføring i elementær bruk av programmet Maple.
 MAPLE-LAB 2 Denne labøvelsen gir en videre innføring i elementær bruk av programmet Maple.. Sett i gang Maple på din PC / arbeidsstasjon. Hvis du sitter på en Linux-basert maskin og opplever problemer
MAPLE-LAB 2 Denne labøvelsen gir en videre innføring i elementær bruk av programmet Maple.. Sett i gang Maple på din PC / arbeidsstasjon. Hvis du sitter på en Linux-basert maskin og opplever problemer
a) Matrisen I uv T har egenverdier 1, med multiplisitet n 1 og 1 v T u, med multiplisitet 1. Derfor er matrisen inverterbar når v T u 1.
 Matrisen I uv T har egenverdier 1, med multiplisitet n 1 og 1 v T u, med multiplisitet 1. Derfor er matrisen inverterbar når v T u 1.") Norges teknisknaturvitenskapelige universitet Institutt for matematiske fag Side 1 av 5 Oppgave 1 a) Matrisen I uv T har egenverdier 1, med multiplisitet n 1 og 1 v T u, med multiplisitet 1. Derfor er
Norges teknisknaturvitenskapelige universitet Institutt for matematiske fag Side 1 av 5 Oppgave 1 a) Matrisen I uv T har egenverdier 1, med multiplisitet n 1 og 1 v T u, med multiplisitet 1. Derfor er
Løsningsforslag til øving 4: Coulombs lov. Elektrisk felt. Magnetfelt.
 Lørdagsverksted i fysikk. Institutt for fysikk, NTNU. Høsten 27. Veiledning: 29. september kl 12:15 15:. Løsningsforslag til øving 4: Coulombs lov. Elektrisk felt. Magnetfelt. Oppgave 1 a) C. Elektrisk
Lørdagsverksted i fysikk. Institutt for fysikk, NTNU. Høsten 27. Veiledning: 29. september kl 12:15 15:. Løsningsforslag til øving 4: Coulombs lov. Elektrisk felt. Magnetfelt. Oppgave 1 a) C. Elektrisk
Matematikk og fysikk RF3100
 DUMMY Matematikk og fysikk RF3100 Løsningsforslag, Øving 11 8mai 201 Tidsfrist: 18mai 201 klokken 1400 Oppgave 1 Obs: I denne oppgaven reperesenterer vi vektorer med 1 n-matriser, altså radvektorer I hele
DUMMY Matematikk og fysikk RF3100 Løsningsforslag, Øving 11 8mai 201 Tidsfrist: 18mai 201 klokken 1400 Oppgave 1 Obs: I denne oppgaven reperesenterer vi vektorer med 1 n-matriser, altså radvektorer I hele
Universitet i Bergen. Eksamen i emnet MAT121 - Lineær algebra
 Universitet i Bergen Det matematisk-naturvitenskapelige fakultet Bokmål Eksamen i emnet MAT2 - Lineær algebra Onsdag 29 mai, 20, kl. 09.00-4.00 Tillatte hjelpemidler. kalkulator, i samsvar med fakultetets
Universitet i Bergen Det matematisk-naturvitenskapelige fakultet Bokmål Eksamen i emnet MAT2 - Lineær algebra Onsdag 29 mai, 20, kl. 09.00-4.00 Tillatte hjelpemidler. kalkulator, i samsvar med fakultetets
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i Eksamensdag: 14 juni 2004 Tid for eksamen: 9.00 12.00 Oppgavesettet er på 5 sider. Vedlegg: Tillatte hjelpemidler: INF-MAT2350
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i Eksamensdag: 14 juni 2004 Tid for eksamen: 9.00 12.00 Oppgavesettet er på 5 sider. Vedlegg: Tillatte hjelpemidler: INF-MAT2350
EKSAMEN I NUMERISK LØSNING AV DIFFERENSIALLIGNINGER MED DIFFERANSEMETODER (TMA4212)
") Norges teknisk naturvitenskapelige universitet Institutt for matematiske fag Side av 6 Faglig kontakt under eksamen: Navn: Brynjulf Owren (964) EKSAMEN I NUMERISK LØSNING AV DIFFERENSIALLIGNINGER MED DIFFERANSEMETODER
Norges teknisk naturvitenskapelige universitet Institutt for matematiske fag Side av 6 Faglig kontakt under eksamen: Navn: Brynjulf Owren (964) EKSAMEN I NUMERISK LØSNING AV DIFFERENSIALLIGNINGER MED DIFFERANSEMETODER
Trekanter er mangekanter med tre sider. Vi skal starte med å bli kjent med verktøyet som brukes til å tegne mangekanter.
 Trekanter GeoGebra er godt egnet til å tegne trekanter og eksperimentere med dem. Vi skal nå se på hvordan vi kan tegne trekanter når vi kjenner en eller flere sider eller vinkler. Vi skal også se på hvordan
Trekanter GeoGebra er godt egnet til å tegne trekanter og eksperimentere med dem. Vi skal nå se på hvordan vi kan tegne trekanter når vi kjenner en eller flere sider eller vinkler. Vi skal også se på hvordan
UNIK 4690 Maskinsyn Introduksjon
 UNIK 4690 Maskinsyn Introduksjon 21.01.2016 Trym Vegard Haavardsholm ([email protected]) Idar Dyrdal ([email protected]) Thomas Opsahl ([email protected]) Ragnar Smestad ([email protected]) Maskinsyn
UNIK 4690 Maskinsyn Introduksjon 21.01.2016 Trym Vegard Haavardsholm ([email protected]) Idar Dyrdal ([email protected]) Thomas Opsahl ([email protected]) Ragnar Smestad ([email protected]) Maskinsyn
MOSBY OPPVEKSTSENTER ÅRSPLAN I NORSK - 1.TRINN Uke Emne Kompetansemål Læringsmål Arbeidsmetode Læremidler Evaluering/
 34 Dette blir som en innholdsfortegnelse. Emne/Tema 35 36 37 38 39 -Jeg og mine venner. -Huset mitt. -Bli kjent med skolens regler og rutiner. -Språkleker; Jørgen Frost -Riming -Stavelser 40 HØSTFERIE
34 Dette blir som en innholdsfortegnelse. Emne/Tema 35 36 37 38 39 -Jeg og mine venner. -Huset mitt. -Bli kjent med skolens regler og rutiner. -Språkleker; Jørgen Frost -Riming -Stavelser 40 HØSTFERIE
Homogene lineære ligningssystem, Matriseoperasjoner
 Homogene lineære ligningssystem, Matriseoperasjoner E.Malinnikova, NTNU, Institutt for matematiske fag September 22, 2010 Antall løsninger til et lineær ligningssystem Teorem Et lineært ligningssytem har
Homogene lineære ligningssystem, Matriseoperasjoner E.Malinnikova, NTNU, Institutt for matematiske fag September 22, 2010 Antall løsninger til et lineær ligningssystem Teorem Et lineært ligningssytem har
BOP / / Høyskolen Kristiania
 BOP / 287963 / Høyskolen Kristiania Introduksjon Problemstillingen var Hvordan skape en ny bærekraftig matkultur i Oslo?, med underproblemstillingen: Hvordan kan pakningsdesign få mennesker til å forandre
BOP / 287963 / Høyskolen Kristiania Introduksjon Problemstillingen var Hvordan skape en ny bærekraftig matkultur i Oslo?, med underproblemstillingen: Hvordan kan pakningsdesign få mennesker til å forandre
Kyrkjekrinsen skole. Plan for perioden: skoleåret 12/13
 Kyrkjekrinsen skole Plan for perioden: skoleåret 12/13 Fag: Norsk År: 2012-2013 Klasse: 1.trinn Mari Saxegaard og Anne Karin Vestrheim Uke Årshjul Hovedtema Kompetansemål Delmål Arbeidsmetode Lese- og
Kyrkjekrinsen skole Plan for perioden: skoleåret 12/13 Fag: Norsk År: 2012-2013 Klasse: 1.trinn Mari Saxegaard og Anne Karin Vestrheim Uke Årshjul Hovedtema Kompetansemål Delmål Arbeidsmetode Lese- og
RF5100 Lineær algebra Løsningsforslag til prøveeksamen
 RF5 Lineær algebra Løsningsforslag til prøveeksamen NITH 6. desember Oppgave (a) Jeg skal løse et system av tre ligninger med tre ukjente. Dette gjør jeg ved å utføre radoperasjoner på matrisen tilhørende
RF5 Lineær algebra Løsningsforslag til prøveeksamen NITH 6. desember Oppgave (a) Jeg skal løse et system av tre ligninger med tre ukjente. Dette gjør jeg ved å utføre radoperasjoner på matrisen tilhørende
Løsningsforslag til eksamen i MA1202/MA6202 Lineær algebra med anvendelser høsten 2009.
 Norges teknisk naturvitenskapelige universitet Institutt for matematiske fag Side av 9 Løsningsforslag til eksamen i MA/MA6 Lineær algebra med anvendelser høsten 9 Oppgave a) Rangen til A er lik antallet
Norges teknisk naturvitenskapelige universitet Institutt for matematiske fag Side av 9 Løsningsforslag til eksamen i MA/MA6 Lineær algebra med anvendelser høsten 9 Oppgave a) Rangen til A er lik antallet
Alle svar skal grunngis. Alle deloppgaver har lik vekt.
 Alle svar skal grunngis. Alle deloppgaver har lik vekt. Oppgave Vi denerer matrisene A, B, og C som A = [ ] 3, B = 5 9, C = 3 3. a) Regn ut følgende matrisesummer og matriseprodukter, om mulig. Dersom
Alle svar skal grunngis. Alle deloppgaver har lik vekt. Oppgave Vi denerer matrisene A, B, og C som A = [ ] 3, B = 5 9, C = 3 3. a) Regn ut følgende matrisesummer og matriseprodukter, om mulig. Dersom
A Benchmark of Selected Algorithmic. Machine Learning and Computer Vision
 A Benchmark of Selected Algorithmic Differentiation Tools on Some Problems in Machine Learning and Computer Vision FILIP SRAJER ZUZANA KUKELOVA ANDREW FITZGIBBON AD2016 11.9.2016 Version for public release
A Benchmark of Selected Algorithmic Differentiation Tools on Some Problems in Machine Learning and Computer Vision FILIP SRAJER ZUZANA KUKELOVA ANDREW FITZGIBBON AD2016 11.9.2016 Version for public release
KONTINUASJONSEKSAMEN Tirsdag 07.05.2002 STE 6159 Styring av romfartøy Løsningsforslag
 + *6.2/(1, 1$59,. Institutt for data-, elektro-, og romteknologi Sivilingeniørstudiet RT KONTINUASJONSEKSAMEN Tirsdag 7.5.22 STE 6159 Styring av romfartøy Løsningsforslag 2SSJDYH (%) D) Kvaternioner benyttes
+ *6.2/(1, 1$59,. Institutt for data-, elektro-, og romteknologi Sivilingeniørstudiet RT KONTINUASJONSEKSAMEN Tirsdag 7.5.22 STE 6159 Styring av romfartøy Løsningsforslag 2SSJDYH (%) D) Kvaternioner benyttes
EKSAMENSOPPGAVE. Kalkulator Rom Stoff Tid: Fysikktabeller (Bok/utskrift fra bok)
") Fakultet for naturvitenskap og teknologi EKSAMENSOPPGAVE Eksamen i: MNF-6002 Videreutdanning i naturfag for lærere, Naturfag trinn 2 Dato: Mandag 29. mai 2017 Klokkeslett: Kl 09:00 13:00 Sted: Åsgårdvegen
Fakultet for naturvitenskap og teknologi EKSAMENSOPPGAVE Eksamen i: MNF-6002 Videreutdanning i naturfag for lærere, Naturfag trinn 2 Dato: Mandag 29. mai 2017 Klokkeslett: Kl 09:00 13:00 Sted: Åsgårdvegen
MA1201 Lineær algebra og geometri Løsningsforslag for eksamen gitt 3. desember 2007
 Norges teknisknaturvitenskapelige universitet Institutt for matematiske fag MA101 Lineær algebra og geometri Løsningsforslag for eksamen gitt 3 desember 007 Oppgave 1 a) Vi ser på ligningssystemet x +
Norges teknisknaturvitenskapelige universitet Institutt for matematiske fag MA101 Lineær algebra og geometri Løsningsforslag for eksamen gitt 3 desember 007 Oppgave 1 a) Vi ser på ligningssystemet x +
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i INF/ Signalbehandling Eksamensdag: 9. desember Tid for eksamen:. 7. Oppgavesettet er på sider. Vedlegg: Ingen Tillatte hjelpemidler:
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i INF/ Signalbehandling Eksamensdag: 9. desember Tid for eksamen:. 7. Oppgavesettet er på sider. Vedlegg: Ingen Tillatte hjelpemidler:
EKSAMEN I NUMERISK LINEÆR ALGEBRA (TMA4205)
") Norges teknisknaturvitenskapelige universitet Institutt for matematiske fag Side av 6 Faglig kontakt under eksamen: Navn: Brynjulf Owren 93064 EKSAMEN I NUMERISK LINEÆR ALGEBRA TMA405 Fredag 5 desember
Norges teknisknaturvitenskapelige universitet Institutt for matematiske fag Side av 6 Faglig kontakt under eksamen: Navn: Brynjulf Owren 93064 EKSAMEN I NUMERISK LINEÆR ALGEBRA TMA405 Fredag 5 desember
Del 1. Linearisering av dynamisk modell
 Inst. for teknisk kybernetikk Fag TELE200 Reguleringsteknikk Øving 2, løsningsforslag Revidert sist Fredrik Dessen 207-09-4 Del. Linearisering av dynamisk modell Vi skal fortsette med cruisekontrollen
Inst. for teknisk kybernetikk Fag TELE200 Reguleringsteknikk Øving 2, løsningsforslag Revidert sist Fredrik Dessen 207-09-4 Del. Linearisering av dynamisk modell Vi skal fortsette med cruisekontrollen
MA-132 Geometri Torsdag 4. desember 2008 kl Tillatte hjelpemidler: Alle trykte og skrevne hjelpemidler. Kalkulator.
 Institutt for matematiske fag EKSAMEN i MA-1 Geometri Torsdag 4. desember 008 kl. 9.00-14.00 Tillatte hjelpemidler: Alle trykte og skrevne hjelpemidler. Kalkulator. Bokmål Oppgave 1 Gitt et linjestykke.
Institutt for matematiske fag EKSAMEN i MA-1 Geometri Torsdag 4. desember 008 kl. 9.00-14.00 Tillatte hjelpemidler: Alle trykte og skrevne hjelpemidler. Kalkulator. Bokmål Oppgave 1 Gitt et linjestykke.
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: MAT 1120 Lineær algebra Eksamensdag: 9. desember 2014. Tid for eksamen: 14.30 18.30. Oppgavesettet er på 6 sider. Vedlegg: Tillatte
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: MAT 1120 Lineær algebra Eksamensdag: 9. desember 2014. Tid for eksamen: 14.30 18.30. Oppgavesettet er på 6 sider. Vedlegg: Tillatte
Oppgavesett. Kapittel Oppgavesett 1
 Kapittel 9 Oppgavesett Dette kapitlet består av fire oppgavesett med oppgaver fra alle deler av kompendiet. 9. Oppgavesett Oppgave. Et dynamisk system er gitt ved x n+ = M x n der M er -matrisen.6.. M
Kapittel 9 Oppgavesett Dette kapitlet består av fire oppgavesett med oppgaver fra alle deler av kompendiet. 9. Oppgavesett Oppgave. Et dynamisk system er gitt ved x n+ = M x n der M er -matrisen.6.. M
Oppgaver og fasit til seksjon
 1 Oppgaver og fasit til seksjon 3.1-3.3 Oppgaver til seksjon 3.1 1. Regn ut a b når a) a = ( 1, 3, 2) b = ( 2, 1, 7) b) a = (4, 3, 1) b = ( 6, 1, 0) 2. Finn arealet til parallellogrammet utspent av a =
1 Oppgaver og fasit til seksjon 3.1-3.3 Oppgaver til seksjon 3.1 1. Regn ut a b når a) a = ( 1, 3, 2) b = ( 2, 1, 7) b) a = (4, 3, 1) b = ( 6, 1, 0) 2. Finn arealet til parallellogrammet utspent av a =
Øving 3. Oppgave 1 (oppvarming med noen enkle oppgaver fra tidligere midtsemesterprøver)
") Institutt for fysikk, NTNU TFY455/FY003: Elektrisitet og magnetisme Vår 2008 Veiledning: Fredag 25. og mandag 28. januar Innleveringsfrist: Fredag. februar kl 2.00 Øving 3 Oppgave (oppvarming med noen
Institutt for fysikk, NTNU TFY455/FY003: Elektrisitet og magnetisme Vår 2008 Veiledning: Fredag 25. og mandag 28. januar Innleveringsfrist: Fredag. februar kl 2.00 Øving 3 Oppgave (oppvarming med noen
MA1410: Analyse - Notat om differensiallikninger
 Høgskolen i Agder Avdeling for realfag MA40: Analyse - Notat om differensiallikninger Dato: Høsten 2000 Merknader: Dette notatet kommer i tillegg til 4.2 og 6. i læreboka. Ma 40: Analyse skal inneholde
Høgskolen i Agder Avdeling for realfag MA40: Analyse - Notat om differensiallikninger Dato: Høsten 2000 Merknader: Dette notatet kommer i tillegg til 4.2 og 6. i læreboka. Ma 40: Analyse skal inneholde
Eksamensoppgåve i KJ1041 Kjemisk binding, spektroskopi og kinetikk
 Institutt for kjemi Eksamensoppgåve i KJ1041 Kjemisk binding, spektroskopi og kinetikk Fagleg kontakt under eksamen: Ida-Marie øyvik Tlf: 99 77 23 63 Eksamensdato: 11. desember 2014 Eksamenstid (frå til):
Institutt for kjemi Eksamensoppgåve i KJ1041 Kjemisk binding, spektroskopi og kinetikk Fagleg kontakt under eksamen: Ida-Marie øyvik Tlf: 99 77 23 63 Eksamensdato: 11. desember 2014 Eksamenstid (frå til):
Eksamen R2, Våren 2011 Løsning
 R Eksamen, Våren 0 Løsning Eksamen R, Våren 0 Løsning Del Tid: timer Hjelpemidler: Vanlige skrivesaker, passer, linjal med centimetermål og vinkelmåler er tillatt. Oppgave (8 poeng) a) Deriver funksjonene
R Eksamen, Våren 0 Løsning Eksamen R, Våren 0 Løsning Del Tid: timer Hjelpemidler: Vanlige skrivesaker, passer, linjal med centimetermål og vinkelmåler er tillatt. Oppgave (8 poeng) a) Deriver funksjonene
Løpende strekmann Erfaren Videregående Python PDF
 Løpende strekmann Erfaren Videregående Python PDF Introduksjon I denne oppgaven skal du lage et spill der du styrer en strekmann som hopper over hindringer. Steg 1: Ny fil Begynn med å lage en fil som
Løpende strekmann Erfaren Videregående Python PDF Introduksjon I denne oppgaven skal du lage et spill der du styrer en strekmann som hopper over hindringer. Steg 1: Ny fil Begynn med å lage en fil som
Oppgave 14 til 9. desember: I polynomiringen K[x, y] i de to variable x og y over kroppen K definerer vi undermengdene:
![Oppgave 14 til 9. desember: I polynomiringen K[x, y] i de to variable x og y over kroppen K definerer vi undermengdene:](/thumbs/64/52216522.jpg "Oppgave 14 til 9. desember: I polynomiringen K[x, y] i de to variable x og y over kroppen K definerer vi undermengdene:") HJEMMEOPPGAVER utgave av 8-12-2002): Oppgave 15 til 16 desember: La H være mengden av alle matriser på formen A = a 1 a 12 a 13 a 1n 0 a 2 0 0 0 0 a 3 0 0 0 a n der a 1 a 2 a n 0 Videre la SH være matrisene
HJEMMEOPPGAVER utgave av 8-12-2002): Oppgave 15 til 16 desember: La H være mengden av alle matriser på formen A = a 1 a 12 a 13 a 1n 0 a 2 0 0 0 0 a 3 0 0 0 a n der a 1 a 2 a n 0 Videre la SH være matrisene
Løsningsforslag. og B =
 Prøve i Matte EMFE DAFE ELFE BYFE Dato: august 25 Hjelpemiddel: Kalkulator og formelark Alle svar skal grunngis. Alle deloppgaver har lik vekt. Oppgave a) Gitt matrisene A = 2 3 2 4 2 Løsningsforslag og
Prøve i Matte EMFE DAFE ELFE BYFE Dato: august 25 Hjelpemiddel: Kalkulator og formelark Alle svar skal grunngis. Alle deloppgaver har lik vekt. Oppgave a) Gitt matrisene A = 2 3 2 4 2 Løsningsforslag og
TMA4110 Matematikk 3 Eksamen høsten 2018 Løsning Side 1 av 9. Løsningsforslag. Vi setter opp totalmatrisen og gausseliminerer:
 TMA4 Matematikk 3 Eksamen høsten 8 Løsning Side av 9 Løsningsforslag Oppgave Vi setter opp totalmatrisen og gausseliminerer: 8 5 4 8 3 36 8 4 8 8 8 Den siste matrisen her er på redusert trappeform, og
TMA4 Matematikk 3 Eksamen høsten 8 Løsning Side av 9 Løsningsforslag Oppgave Vi setter opp totalmatrisen og gausseliminerer: 8 5 4 8 3 36 8 4 8 8 8 Den siste matrisen her er på redusert trappeform, og
Anvendt Robotteknikk Konte Sommer FASIT EKSAMEN HARIS JASAREVIC
 2019 Anvendt Robotteknikk Konte Sommer 2019 - FASIT EKSAMEN HARIS JASAREVIC Innhold Oppgaver... 2 Oppgave 1... 2 Oppgave 2... 3 Oppgave 3... 3 Oppgave 4... 3 Oppgave 5... 3 Oppgave 6... 4 Oppgave 7...
2019 Anvendt Robotteknikk Konte Sommer 2019 - FASIT EKSAMEN HARIS JASAREVIC Innhold Oppgaver... 2 Oppgave 1... 2 Oppgave 2... 3 Oppgave 3... 3 Oppgave 4... 3 Oppgave 5... 3 Oppgave 6... 4 Oppgave 7...
Metoder og læringsressurser
 Tema Kompetansemål Læringsmål 34 ns bokstav: I (i) og LL Tema: Skal vi være venner Skolestart og vennskap. Leke, improvisere og Fortelle sammenhengende om opplevelser og erfaringer. Arbeide kreativt med
Tema Kompetansemål Læringsmål 34 ns bokstav: I (i) og LL Tema: Skal vi være venner Skolestart og vennskap. Leke, improvisere og Fortelle sammenhengende om opplevelser og erfaringer. Arbeide kreativt med
Geometri R1, Prøve 1 løsning
 Geometri R, Prøve løsning Del Tid: 60 min Hjelpemidler: Skrivesaker Oppgave Til høyre ser du en sirkel med sentrum i S. B ligger på sirkelperiferien og punktene Aog Cer skjæringspunkt mellom sirkelen med
Geometri R, Prøve løsning Del Tid: 60 min Hjelpemidler: Skrivesaker Oppgave Til høyre ser du en sirkel med sentrum i S. B ligger på sirkelperiferien og punktene Aog Cer skjæringspunkt mellom sirkelen med
MAT1120 Repetisjon Kap. 1, 2 og 3
 MAT1120 Repetisjon Kap. 1, 2 og 3 Kap. 1, avsn. 2.1-2.3 og kap. 3 i Lays bok er for det meste kjent fra MAT1100 og MAT1110. Fra kap. 1 repeterer vi: Matriser Vektorer og lineære kombinasjoner Lineæravbildninger
MAT1120 Repetisjon Kap. 1, 2 og 3 Kap. 1, avsn. 2.1-2.3 og kap. 3 i Lays bok er for det meste kjent fra MAT1100 og MAT1110. Fra kap. 1 repeterer vi: Matriser Vektorer og lineære kombinasjoner Lineæravbildninger
HØGSKOLEN I BERGEN Avdeling for Ingeniørutdanning
 HØGSKOLEN I BERGEN Avdeling for Ingeniørutdanning EKSAMEN I Matematisk analyse og vektoralgebra, FOA150 KLASSE : Alle DATO : 11. august 006 TID: : Kl. 0900-100 (4 timer) ANTALL OPPGAVER : 5 VARIGHET ANTALL
HØGSKOLEN I BERGEN Avdeling for Ingeniørutdanning EKSAMEN I Matematisk analyse og vektoralgebra, FOA150 KLASSE : Alle DATO : 11. august 006 TID: : Kl. 0900-100 (4 timer) ANTALL OPPGAVER : 5 VARIGHET ANTALL
Mer om kvadratiske matriser
 Kapittel 2 Mer om kvadratiske matriser Vi lader opp til anvendelser, og skal bli enda bedre kjent med matriser. I mange anvendelser er det ofte de kvadratiske matrisene som dukker opp, så fra nå skal vi
Kapittel 2 Mer om kvadratiske matriser Vi lader opp til anvendelser, og skal bli enda bedre kjent med matriser. I mange anvendelser er det ofte de kvadratiske matrisene som dukker opp, så fra nå skal vi
5.8 Iterative estimater på egenverdier
 5.8 Iterative estimater på egenverdier Det finnes ingen eksplisitt formel for beregning av egenverdiene til en kvadratisk matrise. Iterative metoder som finner (ofte) en (meget god) approksimasjon til
5.8 Iterative estimater på egenverdier Det finnes ingen eksplisitt formel for beregning av egenverdiene til en kvadratisk matrise. Iterative metoder som finner (ofte) en (meget god) approksimasjon til
Mer om kvadratiske matriser
 Kapittel 2 Mer om kvadratiske matriser Vi lader opp til anvendelser, og skal bli enda bedre kjent med matriser. I mange anvendelser er det ofte de kvadratiske matrisene som dukker opp, så fra nå skal vi
Kapittel 2 Mer om kvadratiske matriser Vi lader opp til anvendelser, og skal bli enda bedre kjent med matriser. I mange anvendelser er det ofte de kvadratiske matrisene som dukker opp, så fra nå skal vi
Forelesningsnotater SIF8039/ Grafisk databehandling
 Forelesningsnotater SIF839/ Grafisk databehandling Notater til elesninger over: Kapittel 5: Viewing i: Edward Angel: Interactive Computer Graphics Vårsemesteret 22 Torbjørn Hallgren Institutt datateknikk
Forelesningsnotater SIF839/ Grafisk databehandling Notater til elesninger over: Kapittel 5: Viewing i: Edward Angel: Interactive Computer Graphics Vårsemesteret 22 Torbjørn Hallgren Institutt datateknikk
Eksamensoppgåve i LGU51007 Naturfag 1 (5-10) emne 1
 emne 1") Institutt for grunnskolelærerutdanning 5-10 og bachelor i teiknspråk og tolking Eksamensoppgåve i LGU51007 Naturfag 1 (5-10) emne 1 Fagleg kontakt under eksamen: Rodrigo de Miguel (93805362), Jan Tore
Institutt for grunnskolelærerutdanning 5-10 og bachelor i teiknspråk og tolking Eksamensoppgåve i LGU51007 Naturfag 1 (5-10) emne 1 Fagleg kontakt under eksamen: Rodrigo de Miguel (93805362), Jan Tore
1 Gauss-Jordan metode
 Merknad I dette Kompendiet er det gitt referanser både til læreboka og til selve Kompendiet Hvordan å gjenkjenne dem? Referansene til boka er 3- tallede, som Eks 3 Vi kan også referere til 22, kap 22 eller
Merknad I dette Kompendiet er det gitt referanser både til læreboka og til selve Kompendiet Hvordan å gjenkjenne dem? Referansene til boka er 3- tallede, som Eks 3 Vi kan også referere til 22, kap 22 eller
6.8 Anvendelser av indreprodukter
 6.8 Anvendelser av indreprodukter Vektede minste kvadraters problemer Anta at vi approksimerer en vektor y = (y 1,..., y m ) R m med ŷ = (ŷ 1,..., ŷ m ) R m. Et mål for feilen vi da gjør er y ŷ, der betegner
6.8 Anvendelser av indreprodukter Vektede minste kvadraters problemer Anta at vi approksimerer en vektor y = (y 1,..., y m ) R m med ŷ = (ŷ 1,..., ŷ m ) R m. Et mål for feilen vi da gjør er y ŷ, der betegner
INF Obligatorisk oppgave 2
 INF3320 - Obligatorisk oppgave 2 Innleveringsfrist: 23. september (Revisjon 4. september 2003) I denne oppgaven skal vi se på transformasjoner og interaktivitet. Vi skal lage et lite program som implementerer
INF3320 - Obligatorisk oppgave 2 Innleveringsfrist: 23. september (Revisjon 4. september 2003) I denne oppgaven skal vi se på transformasjoner og interaktivitet. Vi skal lage et lite program som implementerer
LP. Leksjon 6: Kap. 6: simpleksmetoden i matriseform, og Seksjon 7.1: følsomhetsanalyse
 LP. Leksjon 6: Kap. 6: simpleksmetoden i matriseform, og Seksjon 7.1: følsomhetsanalyse matrisenotasjon simpleksalgoritmen i matrisenotasjon eksempel negativ transponert egenskap: bevis følsomhetsanalyse
LP. Leksjon 6: Kap. 6: simpleksmetoden i matriseform, og Seksjon 7.1: følsomhetsanalyse matrisenotasjon simpleksalgoritmen i matrisenotasjon eksempel negativ transponert egenskap: bevis følsomhetsanalyse
Løsningsforslag til øving 4
 1 FY100/TFY4160 Bølgefysikk. Institutt for fysikk, NTNU. Høsten 01. Løsningsforslag til øving 4 Oppgave 1 a) D = D 0 [ cos (kx ωt) + sin (kx ωt) ] 1/ = D 0 for alle x og t. Med andre ord, vi har overalt
1 FY100/TFY4160 Bølgefysikk. Institutt for fysikk, NTNU. Høsten 01. Løsningsforslag til øving 4 Oppgave 1 a) D = D 0 [ cos (kx ωt) + sin (kx ωt) ] 1/ = D 0 for alle x og t. Med andre ord, vi har overalt
TDT4195 Bildeteknikk
 TDT495 Bildeteknikk Grafikk Vår 29 Forelesning 5 Jo Skjermo [email protected] Department of Computer And Information Science Jo Skjermo, TDT423 Visualisering 2 TDT495 Forrige gang Attributter til
TDT495 Bildeteknikk Grafikk Vår 29 Forelesning 5 Jo Skjermo [email protected] Department of Computer And Information Science Jo Skjermo, TDT423 Visualisering 2 TDT495 Forrige gang Attributter til