INF3430/INF4431 Høsten Laboppgave 3 ASM Flytskjema Bruk av moduler i et system og design av tilstandsmaskin
|
|
|
- Malene Thomassen
- 7 år siden
- Visninger:
Transkript
1 INF3430/INF4431 Høsten 2011 Laboppgave 3 ASM Flytskjema Bruk av moduler i et system og design av tilstandsmaskin 1
2 Del 1. ASM flytskjema Oppgave 1. I denne oppgaven skal vi lage ASM-flytskjemaer for en FSM som styrer en brusautomat (det skal ikke lages VHDL kode). Viktig å huske fra Zwolinski side at tegnet = betyr å sette et signal til en verdi som varer kun en klokkeperiode og blir resatt til default verdi (vanligvis 0) etter at klokkeperioden er over (eventuelt sette alltid verdi!). Tegnene <- brukes til gi et signal eller en vektor (dvs. mange bit) verdi etter at klokkeperioden er slutt (dvs. i neste klokkeperiode) og beholder verdien inntil den får en ny verdi (dvs. blir et register!). I oppgavene under skal begge to tilordningene brukes. a) Den første versjonen av maskinen er kun en første prototype hvor vi har forenklet kontrollen slik at brusen er gratis. Entiteten til FSM er oppgitt under og det skal lages en Moore FSM som gir et aktivt høyt signal servesoda som varer en klokkeperiode på 20 ns (i.e. 50MHz) når signalet reqserve er aktivt høyt en klokkeperiode (input signalet reqserve er alltid aktivt høyt bare en klokkeperiode om gangen; all prell er allerede fjernet). Signalet led skal være aktivt høyt i 4 sekunder etter at reqserve har vært aktiv. entity sodamachine_simple is port ( clk : in std_logic; rst : in std_logic; reqserve : in std_logic; servesoda : out std_logic; led : out std_logic ); end sodamachine_simple; --Clock --Asynchron reset --Request serve (i.e. start) --Serve soda (i.e. dispence) --LED active high 4 seconds b) I den neste versjonen av brusautomaten koster brusen sodacost kroner og den skal kunne gi tilbake vekslepenger som 10 eller 1 kronestykker hvor henholdsvis signalene coinback10 og deretter coinback1 er aktivt høye så mange klokkeperioder som antall mynter tilsier (dvs. coinback1 høyt i 4 perioder blir 4 kronestykker) etter at led har lyst i 4 sekunder. Vi regner nå at det er uendelig med mynter i automaten så det vil alltid kunne gis veksel og signalene sodacost og money kan ikke være større enn 200 kroner som er høyeste summen automaten aksepterer i form av sedler eller mynter. Hvis det er lagt på for lite penger før reqserve trykkes blir alle pengene gitt tilbake og led lyser, men servesoda blir ikke aktivt. Den nye entiteten er oppgitt under og det skal nå lages en Mealy FSM. entity sodamachine_advanced is port ( clk : in std_logic; rst : in std_logic; sodacost : in std_logic_vector(7 downto 0); reqserve : in std_logic; money : in std_logic_vector(7 downto 0); servesoda : out std_logic; led : out std_logic; coinback1 : out std_logic; coinback10 : out std_logic ); end sodamachine_advanced; --Clock --Asynchron reset --Soda cost (i.e. unit cost) --Request serve (i.e. start) --Money --Serve soda (i.e. dispence) --LED active high 4 seconds --1 kroner back --10 kroner back 2
3 Del 2. Moduler i et system og design av tilstandsmaskiner Innledning Målet med denne laboppgaven er at dere skal få erfaring med å lage tilstandsmaskiner i VHDL. For hver deloppgave skal du følge samme designflyt som i laboppgave 2. Å kunne styre/regulere posisjonen til en robotarm er en grunnleggende funksjon i enhver robot. Vi skal i denne oppgaven lage en IP(Intelectual Property)-modul som skal utgjøre posisjonsregulatoren i en robot. Vi kommer til å benytte denne i flere sammenhenger, i denne oppgaven og i neste der vi skal benytte den sammen med en mikroprosessor. Som en del av prosessen lærer man å sette sammen et større system å jobbe med timing constraints å synkronisere eksterne og interne signaler å benytte ferdige simuleringsmodeller i en testbenk Litt om posisjonsregulering Figure 1. Reguleringssløyfe Når vi skal styre/regulere posisjonen til en robotarm er det vanlig å gjøre dette ved å benytte en elektrisk motor i hvert ledd. Vi ønsker å lage en regulering av posisjonen. I en regulering har vi alltid en tilbakekopling med en måling av det vi ønsker å regulere. Hovedtankegangen er: skal man ha kontroll på hvor man skal må man vite hvor man er. I en styring mangler denne tilbakekoplingen (tar sikte og lukker øynene). Figuren over viser en slik reguleringssløyfe og virkemåten er som følger: 1. Vi påtrykker en skal-verdi, sp (eng. demand eller setpoint) som er en ønsket verdi for posisjonen 2. sp sammenlignes med en målt verdi av posisjonen, pos. Differansen err=sp-pos kalles avviket. 3. err brukes som input til regulatoren som behandler dette med en eller annen matematisk formel (som er gunstig for det man skal regulere) og gir ut et resultat som kalles pådrag. Pådraget benyttes til å styre pådragsorganet. 4. Pådragsorganet er gjerne en kraftoverføringssenhet, som er styrt fra regulatoren og som gir en kraft som er stor nok til å skape en bevegelse. I vårt tilfelle består dette av effekttransistorer som er koblet rett på motoren. I andre system kan det være hydrauliske komponenter, pneumatiske osv. 3
4 Posisjonsmåler I vårt system består posisjonsmåleren av en såkalt optical shaft encoder. Man kan lese mer om denne hos Disse har en aksling og en fast montert del. Akslingen kobles sammen med motorens aksling. Ut av encoderen får man to pulser, a og b, som er 90 grader faseforskjøvet. Hvilke signal som ligger først er avhengig av retningen akslingen roterer. I oppkoblingen vår har vi følgende relasjon mellom retning og faseforskjellen mellom signalene a og b. Retning med klokken sett mot motor, (motor_cw) a b Retning mot klokken sett mot motor, (motor_ccw) a b Figure 2. Posisjonsmåling. Deteksjon av perioder og retning Encoderen vi benytter gir ut 360 prellfrie perioder av signalene a og b pr. omdreining. Dersom vi detekterer signalene som i figuren over gir det oss en oppløselighet på 1grad pr.puls. Vi kan dekke et område fra grader ved å benytte en 8-bits signed datatype for posisjonen, pos 1. Regulator Ofte benyttes regulatorer av typen PID (Proporsjonal-Integral-Differensial). Pådraget kan da uttrykkes som en sum av tre ledd: Pådrag = P + I + D, der P=Kp*err, I= Ki* err og D = Kd*Δerr. Spesielt interesserte kan lese mer om dette f.eks. i applikasjonsnote fra Atmel: I vårt eksempel skal vi gjøre vesentlige forenklinger, men som fungerer veldig bra i praksis. Regulatoren vår skal fungere på følgende måte: Dersom avviket er større enn null, full fart med urviseren. Dersom avviket er mindre enn null, full fart mot urviseren. Dersom avvik er null så er aksel i ønsket posisjon og motoren skal være i ro. Dette fungerer bra fordi motoren vår har en gearkasse med flere hundre ganger utveksling og er på den måten en treg regulering. Å gjøre reguleringen på denne måten tilsvarer en P-regulator med veldig stor forsterkning. Motor og pådragsorgan I vårt eksempel skal vi styre motoren med å benytte to signaler, motor_cw (clock wise) og motor_ccw (counter clock wise) etter følgende tabell: Table 1. Motorsignaler Pådrag Motor bevegelse Motordriver motor_cw motor_ccw Lysdioder 0 0 Ro Slukket 1 0 Med klokken Grønt lys 0 1 Mot klokken Rødt lys 1 1 Ro (ulovlig komb) Slukket 1 Ved å detektere hver flanke av a og b kunne man fått en oppløselighet på 0.25 grader/flanke. Men for oss synes det passende å benytte 8-bits tall siden dette gir oss mulighet til å benytte brytere på kortet på en grei måte til å lage setpoint, sp. 4
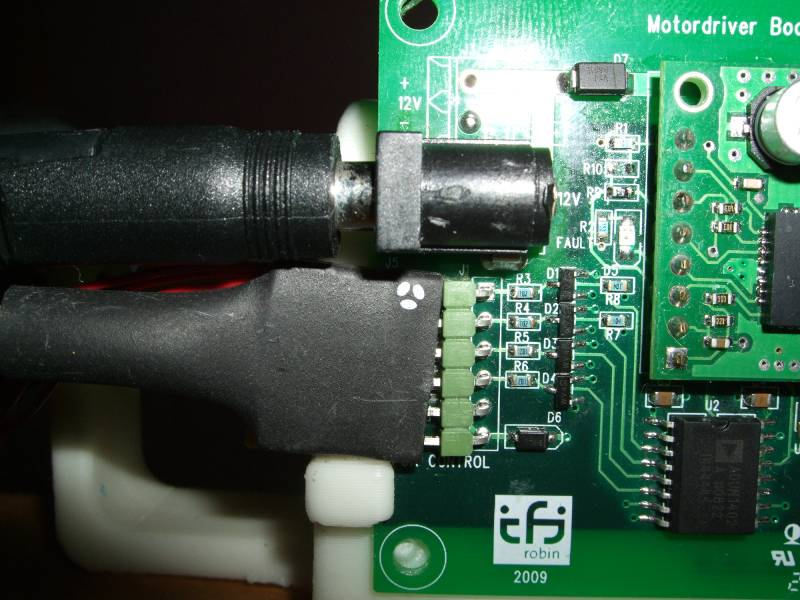
5 Disse signalene er ført ut på expansjonskonnektoren A2 på Spartan kortet. Til A2 konnektoren kobles et ferdig innkjøpt kort, Module Interface Board (MIB). MIB er utstyrt med åtte 6-pins konnektorer, J1-J8. Hver av disse har 3.3V spenning og jord pluss 4 signaler. Det betyr at vi har akkurat plass til signalene motor_cw, motor_ccw til pådragsorganet og posisjonssignalene, a og b. Et MIB kort kan med andre ord benyttes til å styre 8 ledd i en robot. Hver konnektor Ji(i=1,2,..,8) kan kobles til et kort ved navn Motordriver. Appendix A inneholder et detaljert kretsskjema for Motordriver kortet. Motordriver inneholder konnektorer for å koble til posisjonsmåler, motor og et 12V powersupply. Det er også lagt inn et galvanisk skille på Motordriverkortet for å unngå problemer med jording. Pådragssignalene er koblet inn på en ferdiginnkjøpt modul bestående bl.a av en IC med effektransistorer. Denne utgjør vårt pådragsorgan. Man kan lese mer om denne modulen på: Figure 3. Oversikt over systemet Figuren over viser en oversikt over systemet. I appendix A finner man en detaljert tabell over sammenhengen mellom signaler, pinnenummer på Ji konnektorene og pinnenummer på FPGA. Det er også tatt med bilder som viser oppkoblingen mellom de forskjellige modulene. Rapport. For hver deloppgave skal dere levere: 1. VHDL-kildefil(er). 2. VHDL-testbenk. 3. Do-fil(er) for simulering i Modelsim. 4..ucf constraints filer dersom relevant. 5. Place & Route report/static Timing report der man har gjennomført Place og route. En kortfattet rapport som oppsummerer hva som er gjort, med problemer/utfordringer. I tillegg skal dere demonstrere det ferdige systemet i deloppgave 4 for gruppelærer på laben. Alle innleverte VHDL-filer skal følge navnreglene for vhdl-filer og retningslinjene for indentering som beskrevet i kokeboken. 5
6 Oppgave 2. Konstruer en posisjonsmåler ved hjelp av en tilstandsmaskin og en teller. Benytt vedlagte entitet pos_meas_ent.vhd, og ta utgangspunkt i følgende ASM-flytdiagram. Husk at signalene a og b er asynkrone og trenger derfor synkroniseringsflip-flop er. Ved asynkron/synkron reset skal posisjonen resettes til 0. Posisjon skal variere mellom 0-127, og man må sørge for at den aldri går utenfor dette området. HINT: det kan være nyttig å benytte vedlagt simuleringsmodell for motor og posisjonssensor. Figure 4.ASM flytskjema for posisjonsmåler Simuler modulen først grundig med en testbenk. Test modulen deretter på testkortet. Det er spesielt viktig at den aldri går utenfor måleområdet mellom [0,127]. Hint: For å teste pos_meas på kortet kan det være lurt å instantiere den i en test modul, test_pos_meas, som benytter BTN1 og BTN0 for å skape bevelgelse den ene eller andre veien. 6
7 Oppgave 3. Implementer en regulator, p_ctrl, med utgangspunkt i følgende ASM-flydiagram. Bruk vedlagte entitet i p_ctrl_ent.vhd. Simuler modulen grundig med en testbenk. Denne modulen skal bare simuleres og ikke testes på testkortet. Inngangssignalene pos og sp trenger synkroniserings flip-flop er ettersom sp er et eksternt signal og pos er et internt signal som har en annen klokke enn master klokken til resten av systemet i påfølgende deloppgave 3 og 4 hvor p_ctrl skal brukes. Figure 5. ASM flytdiagram for p_ctrl Oppgave 4. Integrer posisjonsmåleren fra a) og regulatoren i fra b) i en ny modul, pos_ctrl. Benytt vedlagt entitet, pos_ctrl_ent.vhd. Legg merke til at p_ctrl skal ha en egen klokke, mclk_div, som ikke er master clock. Det skal være mulig å tvangskjøre motor med eller mot klokken ved å benytte to signaler: force_cw og force_ccw. En multiplekser velger hvilke motorsignaler som skal gjelde etter følgende sannhetstabell: Table 2. Tvangskjøring av motor (F1) force_cw force_ccw motor_cw motor_ccw 0 0 cw (fra p_ctrl) ccw (fra p_ctrl) (force_cw) 1 (force_ccw) (force_cw) 0 (force_ccw) 1 1 cw (fra p_ctrl) ccw (fra p_ctrl) Tvangskjøring er viktig når man skal nullstille posisjonsmålerene i en kjent posisjon, som typisk vil være en endeposisjon. Masker bort øverste bit i sp slik at verdien til sp aldri kan gå utover området før den kobles til p_ctrl (sp <= 0 & sp(6 downto 0)). 7
8 Figure 6. pos_ctrl IP pos_cntr skal ikke implementeres i FPGA, men simuleres grundig med en testbenk. Oppgave 5. Koble sammen et system, pos_seg7_cntr, bestående av pos_ctrl, sjusegmentkontrolleren fra laboppgave 2, samt en Clock Reset Unit (CRU). Figure 7. pos_seg7_ctrl sp skal vises i DISP3 og DISP2 og posisjon, pos, i DISP1 og DISP0. Setpoint, sp, kobles til bryterene SW6-SW0. force_cw og force_ccw kobles til henholdsvis BTN1 og BTN0. 8
9 sync_rst kobles til BTN2. Klokker og reset tas fra Clock Reset Unit, CRU. P_ctrl skal benytte klokken mclk_div og reset signalet rst_div. Lag en constraints fil (.ucf) som i tillegg til pinnenummer constraints har timing constraints for alle input og output signaler i tillegg til det eksterne klokkesignalet refclk og den interne klokken mclk_div sine timing constraint. Se forelesningsslidene hvor et eksempel på en.ucf fil er vist. Hint: Velg Synthesis => Properties => Synthesis Options => Keep Hierarchy => Yes. Da blir hierarkiet fra RTL-koden bevart og klokkenavn og path blir ikke optimalisert bort. Verifiser at designet er constrained. Eventuelle unconstrained pather skal dokumenteres. Hint: Analyse gjøres ved ISE timing analyse. I ISE skal man for Implement Design / Properties sette Post-Place and Route til Verbose og for eksempel 20 i både Error report og Unconstrained report (i tillegg bør "Fastest Path" velges). Ved å søke på unconstrained i timing rapporten finnes alle eventuelle unconstrained paths. Se forelesningsslides om constraining. Pos_seg7_ctrl skal både simuleres og implementeres i FPGA. Den skal også benyttes i laboppgave 4 sammen med bl.a. en mikroprosessor. LYKKE TIL! 9
10 Appendix Pinnenummer Table 3. Motorstyringssignaler og pinnenummer JX pin A2 pin FPGA pin Signal J1 1 4 E6 motor_cw 2 6 C5 motor_ccw 3 5 D5 a 4 8 C6 b J2 1 7 D6 motor_cw 2 10 C7 motor_ccw 3 9 E7 a 4 12 C8 b J D7 motor_cw 2 14 C9 motor_ccw 3 13 D8 A 4 16 A3 B J D10 motor_cw 2 18 A4 motor_ccw 3 17 B4 A 4 20 A5 B J B5 motor_cw 2 22 B7 motor_ccw 3 21 B6 A 4 24 B8 B J A7 motor_cw 2 26 A9 motor_ccw 3 25 A8 A 4 28 A10 B J B10 motor_cw 2 30 B12 motor_ccw 3 29 B11 a 4 32 B13 b J A12 motor_cw 2 34 B14 motor_ccw 3 33 A13 a 4 35 D9 b 10
11 Motordriverkort 11
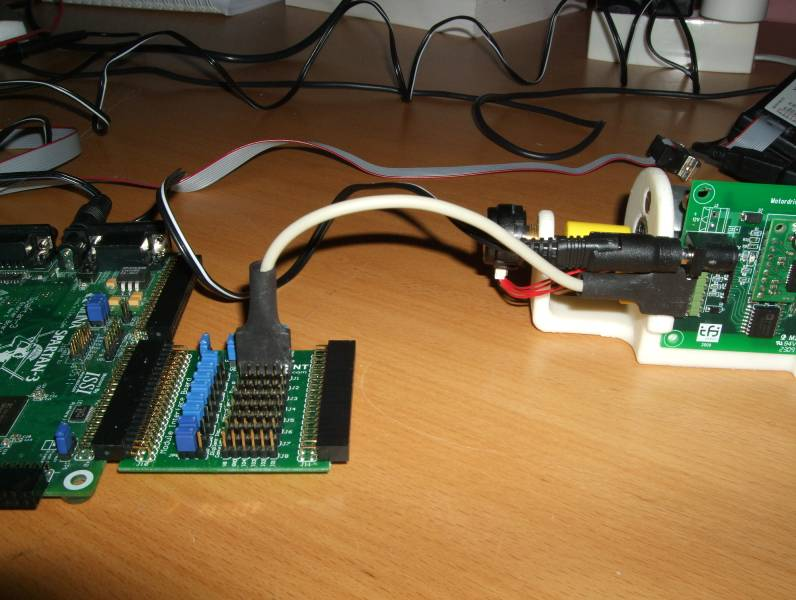

12 Tilkoblinger mellom Spartankort ->MIB->Motordriverkort 12V A2 12
INF3430/4431 Høsten Laboppgave 2 VHDL-programmering Funksjoner og prosedyrer/bibliotek Styring av sjusegmenter
 INF343/443 Høsten 2 Laboppgave 2 VHDL-programmering Funksjoner og prosedyrer/bibliotek Styring av sjusegmenter Innledning. Målene med denne laboppgaven er å lære om subprogrammer og biblioteker i VHDL
INF343/443 Høsten 2 Laboppgave 2 VHDL-programmering Funksjoner og prosedyrer/bibliotek Styring av sjusegmenter Innledning. Målene med denne laboppgaven er å lære om subprogrammer og biblioteker i VHDL
INF3430/4431 Høsten Laboppgave 4 System on Chip (SoC) konstruksjon
 konstruksjon") INF3430/4431 Høsten 2011 Laboppgave 4 System on Chip (SoC) konstruksjon 1 Innledning. Hovedmålet med denne laboppgaven er at dere skal lære å lage et såkalt System on Chip (SoC) hvor det skal legges inn
INF3430/4431 Høsten 2011 Laboppgave 4 System on Chip (SoC) konstruksjon 1 Innledning. Hovedmålet med denne laboppgaven er at dere skal lære å lage et såkalt System on Chip (SoC) hvor det skal legges inn
INF3340/4340. Synkrone design Tilstandsmaskiner
 INF3340/4340 Synkrone design Tilstandsmaskiner 18.09.2007 Agenda Tilstandsmaskiner Mealy og Moore maskiner ASM tilstandsdiagrammer Syntese av ASM diagrammer Tilstandskoding Implementasjon ved bruk av VHDL
INF3340/4340 Synkrone design Tilstandsmaskiner 18.09.2007 Agenda Tilstandsmaskiner Mealy og Moore maskiner ASM tilstandsdiagrammer Syntese av ASM diagrammer Tilstandskoding Implementasjon ved bruk av VHDL
Fys 3270/4270 høsten Laboppgave 2: Grunnleggende VHDL programmering. Styring av testkortets IO enheter.
 Fys 3270/4270 høsten 2004 Laboppgave 2: Grunnleggende VHDL programmering. Styring av testkortets IO enheter. Innledning. Målet med denne laboppgaven er at dere skal lære å lage enkle hardware beskrivelser
Fys 3270/4270 høsten 2004 Laboppgave 2: Grunnleggende VHDL programmering. Styring av testkortets IO enheter. Innledning. Målet med denne laboppgaven er at dere skal lære å lage enkle hardware beskrivelser
INF3340. Tilstandsmaskiner
 INF3340 Tilstandsmaskiner Innhold Tilstandsmaskiner Mealy og Moore maskiner ASM tilstandsdiagrammer Syntese av ASM diagrammer Tilstandskoding Implementasjon ved bruk av VHDL Eksempler INF3430-Tilstandsmaskiner
INF3340 Tilstandsmaskiner Innhold Tilstandsmaskiner Mealy og Moore maskiner ASM tilstandsdiagrammer Syntese av ASM diagrammer Tilstandskoding Implementasjon ved bruk av VHDL Eksempler INF3430-Tilstandsmaskiner
INF3340/4431. Tilstandsmaskiner
 INF3340/4431 Tilstandsmaskiner Innhold Tilstandsmaskiner Mealy og Moore maskiner SM tilstandsdiagrammer Syntese av SM diagrammer Tilstandskoding Implementasjon ved bruk av VHDL Eksempler INF3430/4431 -
INF3340/4431 Tilstandsmaskiner Innhold Tilstandsmaskiner Mealy og Moore maskiner SM tilstandsdiagrammer Syntese av SM diagrammer Tilstandskoding Implementasjon ved bruk av VHDL Eksempler INF3430/4431 -
Det matematisk-naturvitenskapelige fakultet. INF4431 Digital systemkonstruksjon
 Side 1 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF4431 Digital systemkonstruksjon Eksamensdag: 7. desember 2011 Tid for eksamen: 9-13 Oppgavesettet er på 11 sider Vedlegg:
Side 1 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF4431 Digital systemkonstruksjon Eksamensdag: 7. desember 2011 Tid for eksamen: 9-13 Oppgavesettet er på 11 sider Vedlegg:
INF1400. Tilstandsmaskin
 INF4 Tilstandsmaskin Hovedpunkter Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D-flip-flop tilstandsmaskin Reduksjon av antall tilstander Tilordning av tilstandskoder Designprosedyre for
INF4 Tilstandsmaskin Hovedpunkter Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D-flip-flop tilstandsmaskin Reduksjon av antall tilstander Tilordning av tilstandskoder Designprosedyre for
Store design. Kapittel 6
 Store design Kapittel 6 Hierarki hvorfor bruke det Dele opp designet i håndterbare designenheter. Fokusere på mindre, håndterbare enheter vil føre til færre feil og raskere debugging av feil. Verifisere
Store design Kapittel 6 Hierarki hvorfor bruke det Dele opp designet i håndterbare designenheter. Fokusere på mindre, håndterbare enheter vil føre til færre feil og raskere debugging av feil. Verifisere
INF3430/4431. VHDL byggeblokker og testbenker
 INF3430/4431 VHDL byggeblokker og testbenker Entity/architecture Innhold Strukturelle design (nettliste) Generics Configurations Operatorer-Operator prioritet (precedence) Datatyper Bit / IEEE1164 std_ulogic
INF3430/4431 VHDL byggeblokker og testbenker Entity/architecture Innhold Strukturelle design (nettliste) Generics Configurations Operatorer-Operator prioritet (precedence) Datatyper Bit / IEEE1164 std_ulogic
TELE2010A Digital Systemkonstruksjon
 TELE2010A Digital Systemkonstruksjon Øving 3/2015 Del 1, Teller: Husk å arbeide i det lokale arbeidsområdet på disken. Kopier filene til serveren når dere er ferdig for å kunne bruke dem neste gang. max_tall
TELE2010A Digital Systemkonstruksjon Øving 3/2015 Del 1, Teller: Husk å arbeide i det lokale arbeidsområdet på disken. Kopier filene til serveren når dere er ferdig for å kunne bruke dem neste gang. max_tall
INF3430. VHDL byggeblokker og testbenker
 INF3430 VHDL byggeblokker og Innhold Entity/architecture Strukturelle design (nettliste) Generics Configurations Operatorer-Operator prioritet (precedence) Datatyper Bit / IEEE1164 std_ulogic /std_logic
INF3430 VHDL byggeblokker og Innhold Entity/architecture Strukturelle design (nettliste) Generics Configurations Operatorer-Operator prioritet (precedence) Datatyper Bit / IEEE1164 std_ulogic /std_logic
Synkron logikk. Sekvensiell logikk; to typer:
 Sekvensiell logikk De fleste digitale systemer har også minneelementer (f.eks flipflopper) i tillegg til kombinatorisk logikk, og kalles da sekvensiell logikk Output i en sekvensiell krets er avhengig
Sekvensiell logikk De fleste digitale systemer har også minneelementer (f.eks flipflopper) i tillegg til kombinatorisk logikk, og kalles da sekvensiell logikk Output i en sekvensiell krets er avhengig
INF 3430/4430. Viktige momenter i syntese og for valg av teknologi
 INF 3430/4430 Viktige momenter i syntese og for valg av teknologi 17.10.2007 Agenda RTL syntese Constraints Pipelining Syntese for FPGA Behavorial syntese INF3430/4430 Side 2 RTL/ Behavorial syntese RTL
INF 3430/4430 Viktige momenter i syntese og for valg av teknologi 17.10.2007 Agenda RTL syntese Constraints Pipelining Syntese for FPGA Behavorial syntese INF3430/4430 Side 2 RTL/ Behavorial syntese RTL
INF3430/4430. Grunnleggende VHDL
 INF3430/4430 Grunnleggende VHDL 26.09.2005 20.57 Agenda Entity/architecture Strukturelle design (netlist) Generics Configurations Operatorer-Operator presedence Datatyper Bit / IEEE1164 Std_ulogic /std_logic
INF3430/4430 Grunnleggende VHDL 26.09.2005 20.57 Agenda Entity/architecture Strukturelle design (netlist) Generics Configurations Operatorer-Operator presedence Datatyper Bit / IEEE1164 Std_ulogic /std_logic
INF3430/4431. VHDL byggeblokker og testbenker forts.
 INF343/4431 VHDL byggeblokker og testbenker forts. Innhold IEEE 1164 std_logic Configurations Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker
INF343/4431 VHDL byggeblokker og testbenker forts. Innhold IEEE 1164 std_logic Configurations Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker
Oppgave 1 En 4-input Xilinx LUT med innhold 9009 (hex) realiserer en: A xor-xor-or B xor-xor-nand C xor-xor-nor D xor-xor-and E xor-xor-xor
 realiserer en: A xor-xor-or B xor-xor-nand C xor-xor-nor D xor-xor-and E xor-xor-xor") Oppgave 1 En 4-input Xilinx LU med innhold 9009 (hex) realiserer en: Oppgave 2 PGA-teknologi A xor-xor-or B xor-xor-nand C xor-xor-nor D xor-xor-and E xor-xor-xor A orbindslinjer mellom LU er har vanligvis
Oppgave 1 En 4-input Xilinx LU med innhold 9009 (hex) realiserer en: Oppgave 2 PGA-teknologi A xor-xor-or B xor-xor-nand C xor-xor-nor D xor-xor-and E xor-xor-xor A orbindslinjer mellom LU er har vanligvis
INF3430/4430. Grunnleggende VHDL. 11-Sep-06
 INF3430/4430 Grunnleggende VHDL 11-Sep-06 Agenda Entity/architecture Strukturelle design (netlist) Generics Configurations Operatorer-Operator presedence Datatyper Bit / IEEE1164 Std_ulogic /std_logic
INF3430/4430 Grunnleggende VHDL 11-Sep-06 Agenda Entity/architecture Strukturelle design (netlist) Generics Configurations Operatorer-Operator presedence Datatyper Bit / IEEE1164 Std_ulogic /std_logic
Forelesning 7. Tilstandsmaskin
 Forelesning 7 Tilstandsmaskin Hovedpunkter Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D flip-flop basert tilstandsmaskin Reduksjon av antall tilstander Tilordning av tilstandskoder Designprosedyre
Forelesning 7 Tilstandsmaskin Hovedpunkter Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D flip-flop basert tilstandsmaskin Reduksjon av antall tilstander Tilordning av tilstandskoder Designprosedyre
INF3430/4431. VHDL byggeblokker og testbenker forts.
 INF3430/4431 VHDL byggeblokker og testbenker forts. Innhold Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker for kombinatoriske kretser Stimuli
INF3430/4431 VHDL byggeblokker og testbenker forts. Innhold Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker for kombinatoriske kretser Stimuli
Løsningsforslag INF1400 H04
 Løsningsforslag INF1400 H04 Oppgave 1 Sannhetstabell og forenkling av Boolske uttrykk (vekt 18%) I figuren til høyre er det vist en sannhetstabell med 4 variable A, B, C og D. Finn et forenklet Boolsk
Løsningsforslag INF1400 H04 Oppgave 1 Sannhetstabell og forenkling av Boolske uttrykk (vekt 18%) I figuren til høyre er det vist en sannhetstabell med 4 variable A, B, C og D. Finn et forenklet Boolsk
INF3430/4431. Viktige momenter i syntese og for valg av teknologi Chipscope
 INF3430/4431 Viktige momenter i syntese og for valg av teknologi Chipscope Agenda RTL syntese Constraints Pipelining Syntese for FPGA Chipscope INF3430/4431 2 RTL/ Behavorial syntese RTL (Register Transfer
INF3430/4431 Viktige momenter i syntese og for valg av teknologi Chipscope Agenda RTL syntese Constraints Pipelining Syntese for FPGA Chipscope INF3430/4431 2 RTL/ Behavorial syntese RTL (Register Transfer
INF1400. Tilstandsmaskin
 INF4 Tilstandsmaskin Hovedpunkter Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D-flip-flop tilstandsmaskin Reduksjon av antall tilstander Tilordning av tilstandskoder Designprosedyre for
INF4 Tilstandsmaskin Hovedpunkter Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D-flip-flop tilstandsmaskin Reduksjon av antall tilstander Tilordning av tilstandskoder Designprosedyre for
Tilstandsmaskiner (FSM) Kapittel 5
 Kapittel 5") Tilstandsmaskiner (FSM) Kapittel 5 1) Sette opp tilstandsdiagram Tradisjonell konstruksjonsmetode 2) Sette opp tilstandstabell ut fra tilstandsdiagrammet Nåværende tilstand (PS) og input Neste tilstand
Tilstandsmaskiner (FSM) Kapittel 5 1) Sette opp tilstandsdiagram Tradisjonell konstruksjonsmetode 2) Sette opp tilstandstabell ut fra tilstandsdiagrammet Nåværende tilstand (PS) og input Neste tilstand
INF2270. Sekvensiell Logikk
 INF227 Sekvensiell Logikk Hovedpunkter Definisjoner Portforsinkelse Shift register Praktiske Eksempler Latch SR D Flip-Flop D JK T Tilstandsmaskiner Tilstandsdiagrammer Reduksjon av tilstand Ubrukte tilstander
INF227 Sekvensiell Logikk Hovedpunkter Definisjoner Portforsinkelse Shift register Praktiske Eksempler Latch SR D Flip-Flop D JK T Tilstandsmaskiner Tilstandsdiagrammer Reduksjon av tilstand Ubrukte tilstander
Dagens temaer. temaer hentes fra kapittel 3 i Computer Organisation. av sekvensielle kretser. and Architecture. Tilstandsdiagram.
 Dagens temaer 1 Dagens Sekvensiell temaer hentes fra kapittel 3 i Computer Organisation and Architecture logikk Flip-flop er Design av sekvensielle kretser Tilstandsdiagram Tellere og registre Sekvensiell
Dagens temaer 1 Dagens Sekvensiell temaer hentes fra kapittel 3 i Computer Organisation and Architecture logikk Flip-flop er Design av sekvensielle kretser Tilstandsdiagram Tellere og registre Sekvensiell
INF 3430/4430. Simuleringsmetodikk
 INF 3430/4430 Simuleringsmetodikk 02.11.2005 Agenda Event driven simulation Simulering av VHDL-modeller Selvtestende testbenker Verifikasjon av syntetisert/plassert design mot RTL-kode Fil-operasjoner
INF 3430/4430 Simuleringsmetodikk 02.11.2005 Agenda Event driven simulation Simulering av VHDL-modeller Selvtestende testbenker Verifikasjon av syntetisert/plassert design mot RTL-kode Fil-operasjoner
Kapittel 5 Tilstandsmaskin
 Hovedpunkter Kapittel 5 Tilstandsmaskin Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D flip-flop basert smaskin Reduksjon av antall er Tilordning av skoder Designprosedyre for smaskin basert
Hovedpunkter Kapittel 5 Tilstandsmaskin Tilstandsmaskin Tilstandstabell Tilstandsdiagram Analyse av D flip-flop basert smaskin Reduksjon av antall er Tilordning av skoder Designprosedyre for smaskin basert
INF 3430/4430. Simuleringsmetodikk
 INF 3430/4430 Simuleringsmetodikk Innhold Event driven simulation Simulering av VHDL-modeller Selvtestende testbenker Fil-operasjoner Eksempel på SRAM modell og simulering av lesing fra denne INF3430 Side
INF 3430/4430 Simuleringsmetodikk Innhold Event driven simulation Simulering av VHDL-modeller Selvtestende testbenker Fil-operasjoner Eksempel på SRAM modell og simulering av lesing fra denne INF3430 Side
LØSNINGSFORSLAG 2006
 LØSNINGSFORSLAG 2006 Side 1 Oppgave 1), vekt 12.5% 1a) Bruk Karnaughdiagram for å forenkle følgende funksjon: Y = a b c d + a b c d + a b cd + a bc d + a bc d + ab c d + ab cd ab cd 00 01 11 10 00 1 1
LØSNINGSFORSLAG 2006 Side 1 Oppgave 1), vekt 12.5% 1a) Bruk Karnaughdiagram for å forenkle følgende funksjon: Y = a b c d + a b c d + a b cd + a bc d + a bc d + ab c d + ab cd ab cd 00 01 11 10 00 1 1
INF3430. Fasit eksamen Høst 2009. Oppgave 1 6. Oppgave A B C D E 1 X X 2 X 3 X X 4 X X 5 X X 6 X
 INF3430. Fasit eksamen Høst 2009. Oppgave 1 6. Oppgave A B C D E 1 X X 2 X 3 X X 4 X X 5 X X 6 X INF3430 Eksamen H09 VHDL besvarelse Oppgave 7: signal_values INF3430 - H09 1 INF3430 Eksamen H09 VHDL besvarelse
INF3430. Fasit eksamen Høst 2009. Oppgave 1 6. Oppgave A B C D E 1 X X 2 X 3 X X 4 X X 5 X X 6 X INF3430 Eksamen H09 VHDL besvarelse Oppgave 7: signal_values INF3430 - H09 1 INF3430 Eksamen H09 VHDL besvarelse
En mengde andre typer som DVD, CD, FPGA, Flash, (E)PROM etc. (Kommer. Hukommelse finnes i mange varianter avhengig av hva de skal brukes til:
PROM etc. (Kommer. Hukommelse finnes i mange varianter avhengig av hva de skal brukes til:") 2 Dagens temaer Dagens 4 Sekvensiell temaer hentes fra kapittel 3 i Computer Organisation and Architecture Design Flip-flop er av sekvensielle kretser Tellere Tilstandsdiagram og registre Sekvensiell Hvis
2 Dagens temaer Dagens 4 Sekvensiell temaer hentes fra kapittel 3 i Computer Organisation and Architecture Design Flip-flop er av sekvensielle kretser Tellere Tilstandsdiagram og registre Sekvensiell Hvis
IN1020. Sekvensiell Logikk
 IN12 Sekvensiell Logikk Hovedpunkter Definisjoner Portforsinkelse Praktiske Eksempler Latch SR D Flip-Flop D JK T Tilstandsmaskiner Tilstandsdiagrammer og tilstandstabeller Omid Mirmotahari 2 Definisjoner
IN12 Sekvensiell Logikk Hovedpunkter Definisjoner Portforsinkelse Praktiske Eksempler Latch SR D Flip-Flop D JK T Tilstandsmaskiner Tilstandsdiagrammer og tilstandstabeller Omid Mirmotahari 2 Definisjoner
UNIVERSITETET I OSLO
 Side 1 av 7 UNIVERSITETET I OSLO et matematisk-naturvitenskapelige fakultet Eksamen i: INF3430/INF4430 igital systemkonstruksjon Eksamensdag: 6. desember 2006 Tid for eksamen: 9-12 Oppgavesettet er på
Side 1 av 7 UNIVERSITETET I OSLO et matematisk-naturvitenskapelige fakultet Eksamen i: INF3430/INF4430 igital systemkonstruksjon Eksamensdag: 6. desember 2006 Tid for eksamen: 9-12 Oppgavesettet er på
INF3430. Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer
 INF3430 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer Innhold Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard biblioteker
INF3430 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer Innhold Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard biblioteker
INF 3430/4431. Simuleringsmetodikk
 INF 3430/4431 Simuleringsmetodikk Innhold Event driven simulation Simulering av VHDL-modeller Selvtestende testbenker Fil-operasjoner Eksempel på SRAM modell og simulering av lesing fra denne INF3430/4431
INF 3430/4431 Simuleringsmetodikk Innhold Event driven simulation Simulering av VHDL-modeller Selvtestende testbenker Fil-operasjoner Eksempel på SRAM modell og simulering av lesing fra denne INF3430/4431
UNIVERSITETET I OSLO
 Eksamen i: UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet INF1400 Digital teknologi Eksamensdag: 29. november 2011 Tid for eksamen: Vedlegg: Tillatte hjelpemidler: Oppgavesettet er på
Eksamen i: UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet INF1400 Digital teknologi Eksamensdag: 29. november 2011 Tid for eksamen: Vedlegg: Tillatte hjelpemidler: Oppgavesettet er på
INF3430 Høsten ChipScope PRO - En kort innføring
 INF3430 Høsten 2008 ChipScope PRO - En kort innføring Innhold Innledning... 3 Generering av Chipscope kjerner... 4 Generering av ICON (Integrated Controller) modul... 4 Generering av ILA (Integrated Logic
INF3430 Høsten 2008 ChipScope PRO - En kort innføring Innhold Innledning... 3 Generering av Chipscope kjerner... 4 Generering av ICON (Integrated Controller) modul... 4 Generering av ILA (Integrated Logic
INF3430/4430 Høsten Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE
 INF3430/4430 Høsten 2005 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...3 1.1 Designflyt for programmerbar logikk... 4 1.2 Verktøy benyttet i kurset... 6 2 Hvordan komme
INF3430/4430 Høsten 2005 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...3 1.1 Designflyt for programmerbar logikk... 4 1.2 Verktøy benyttet i kurset... 6 2 Hvordan komme
Dagens temaer. Dagens temaer hentes fra kapittel 3 i Computer Organisation and Architecture. Sekvensiell logikk. Flip-flop er
 Dagens temaer Dagens temaer hentes fra kapittel 3 i Computer Organisation and Architecture Sekvensiell logikk Flip-flop er Design av sekvensielle kretser Tilstandsdiagram Tellere og registre INF2270 1/19
Dagens temaer Dagens temaer hentes fra kapittel 3 i Computer Organisation and Architecture Sekvensiell logikk Flip-flop er Design av sekvensielle kretser Tilstandsdiagram Tellere og registre INF2270 1/19
INF3430/4430. Kombinatoriske og sekvensielle byggeblokker implementert i VHDL :57
 INF3430/4430 Kombinatoriske og sekvensielle byggeblokker implementert i VHDL 26.09.2005 20:57 Agenda Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker
INF3430/4430 Kombinatoriske og sekvensielle byggeblokker implementert i VHDL 26.09.2005 20:57 Agenda Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker
INF3430. VHDL byggeblokker og testbenker forts.
 INF343 VHDL byggeblokker og testbenker forts. Innhold Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker for kombinatoriske kretser Stimuli Sammenligning
INF343 VHDL byggeblokker og testbenker forts. Innhold Kombinatoriske kretser forts. Concurrent(dataflow) beskrivelser Beskrivelser ved bruk av process Testbenker for kombinatoriske kretser Stimuli Sammenligning
Versjon2.0/ ChipScope PRO - En kort innføring
 Versjon2.0/29.09.2013 ChipScope PRO - En kort innføring Innhold Innledning...3 Generering av Chipscope kjerner...4 Generering av ICON (Integrated Controller) modul...6 Generering av ILA (Integrated Logic
Versjon2.0/29.09.2013 ChipScope PRO - En kort innføring Innhold Innledning...3 Generering av Chipscope kjerner...4 Generering av ICON (Integrated Controller) modul...6 Generering av ILA (Integrated Logic
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 Digital teknologi Eksamensdag: 5. desember 2005 Tid for eksamen: 9-12 Vedlegg: Tillatte hjelpemidler: Oppgavesettet er
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 Digital teknologi Eksamensdag: 5. desember 2005 Tid for eksamen: 9-12 Vedlegg: Tillatte hjelpemidler: Oppgavesettet er
INF3430/4431. Introduksjon til VHDL Spartan starterkit Spartan-3 FPGA
 INF3430/4431 Introduksjon til VHDL Spartan starterkit Spartan-3 FPGA Agenda Hva skal vi gjøre i INF3430/4431? VDHL simulering/syntese Place & Route til FPGA Prøve ut design i ekte hardware Hvorfor VHDL
INF3430/4431 Introduksjon til VHDL Spartan starterkit Spartan-3 FPGA Agenda Hva skal vi gjøre i INF3430/4431? VDHL simulering/syntese Place & Route til FPGA Prøve ut design i ekte hardware Hvorfor VHDL
Entities and architectures. Kapittel 3
 Entities and architectures Kapittel 3 VHDL program Én fil Entities and architectures Entity declaration og architecture body Analogi til en IC: Entiteten beskriver interfacet til omgivelsen (pakkens tilkoblingspinner)
Entities and architectures Kapittel 3 VHDL program Én fil Entities and architectures Entity declaration og architecture body Analogi til en IC: Entiteten beskriver interfacet til omgivelsen (pakkens tilkoblingspinner)
Kombinatorisk og synkron logikk. Kapittel 4
 Kombinatorisk og synkron logikk Kapittel 4 Eksempel; FIFO First-In-First-Out Eksempelet i boka er en noe redusert fifo (mangler empty flag, full flag osv.), men har de viktigste elementene Denne FIFOen
Kombinatorisk og synkron logikk Kapittel 4 Eksempel; FIFO First-In-First-Out Eksempelet i boka er en noe redusert fifo (mangler empty flag, full flag osv.), men har de viktigste elementene Denne FIFOen
INF3430/4431. Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer
 INF3430/4431 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer Innhold Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard biblioteker
INF3430/4431 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer Innhold Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard biblioteker
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro- og datateknikk Kandidatnr: Eksamensdato: Lengd/eksamenstid: Emnekode: Emnenamn: Klasse: Studiepoeng: Faglerar: Forslag på svar for
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro- og datateknikk Kandidatnr: Eksamensdato: Lengd/eksamenstid: Emnekode: Emnenamn: Klasse: Studiepoeng: Faglerar: Forslag på svar for
Det matematisk-naturvitenskapelige fakultet
 Side 1 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 Eksamensdag: 5/12-2006 Tid for eksamen: 15:30 18:30 Oppgavesettet er på: 5 sider Vedlegg: Ingen Tillatte hjelpemidler:
Side 1 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 Eksamensdag: 5/12-2006 Tid for eksamen: 15:30 18:30 Oppgavesettet er på: 5 sider Vedlegg: Ingen Tillatte hjelpemidler:
INF3430/4430 Høsten Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE
 INF3430/4430 Høsten 2007 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy... 4 1.1 Designflyt for programmerbar logikk... 5 1.1.1.1 Design entry... 5 1.1.1.2 Register Transfer
INF3430/4430 Høsten 2007 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy... 4 1.1 Designflyt for programmerbar logikk... 5 1.1.1.1 Design entry... 5 1.1.1.2 Register Transfer
MAX MIN RESET. 7 Data Inn Data Ut. Load
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i IN 240 çç Digital Systemkonstruksjon Eksamensdag: 6. desember 2000 Tid for eksamen: 9.00 ç 15.00 Oppgavesettet er p 5 sider. Vedlegg:
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i IN 240 çç Digital Systemkonstruksjon Eksamensdag: 6. desember 2000 Tid for eksamen: 9.00 ç 15.00 Oppgavesettet er p 5 sider. Vedlegg:
INF3430/4430 Høsten Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE
 INF3430/4430 Høsten 2006 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...4 1.1 Designflyt for programmerbar logikk... 5 1.1.1.1 Design entry... 5 1.1.1.2 Register Transfer
INF3430/4430 Høsten 2006 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...4 1.1 Designflyt for programmerbar logikk... 5 1.1.1.1 Design entry... 5 1.1.1.2 Register Transfer
INF3430/4430. Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer
 INF3430/4430 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer 19.09.2006 Agenda Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard
INF3430/4430 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer 19.09.2006 Agenda Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard
Oppgave 1 (Flanke- og nivåstyrte vipper)
") Utlevert: mandag 29. april 2008 Veiledning: ingen veiledning ette er en frivillig øving. Øvingen tar for seg siste del av pensum, og det er derfor anbefalt å regne gjennom øvingen. et vil ikke bli gitt
Utlevert: mandag 29. april 2008 Veiledning: ingen veiledning ette er en frivillig øving. Øvingen tar for seg siste del av pensum, og det er derfor anbefalt å regne gjennom øvingen. et vil ikke bli gitt
INF1400. Sekvensiell logikk del 1
 INF1400 Sekvensiell logikk del 1 Hovedpunkter Låsekretser (latch er) SR latch med NOR-porter S R latch med NAND-porter D-latch Flip-flop Master-slave D-flip-flop JK flip-flop T-flip-flop Omid Mirmotahari
INF1400 Sekvensiell logikk del 1 Hovedpunkter Låsekretser (latch er) SR latch med NOR-porter S R latch med NAND-porter D-latch Flip-flop Master-slave D-flip-flop JK flip-flop T-flip-flop Omid Mirmotahari
Repetisjon digital-teknikk. teknikk,, INF2270
 Repetisjon digital-teknikk teknikk,, INF227 Grovt sett kan digital-teknikk-delen fordeles i tre: Boolsk algebra og digitale kretser Arkitektur (Von Neuman, etc.) Ytelse (Pipelineling, cache, hukommelse,
Repetisjon digital-teknikk teknikk,, INF227 Grovt sett kan digital-teknikk-delen fordeles i tre: Boolsk algebra og digitale kretser Arkitektur (Von Neuman, etc.) Ytelse (Pipelineling, cache, hukommelse,
Forelesning 6. Sekvensiell logikk
 Forelesning 6 Sekvensiell logikk Hovedpunkter Låsekretser (latch er) SR latch bygget med NOR S R latch bygget med NAN latch Flip-Flops Master-slave flip-flop JK flip-flop T flip-flop 2 efinisjoner Kombinatorisk
Forelesning 6 Sekvensiell logikk Hovedpunkter Låsekretser (latch er) SR latch bygget med NOR S R latch bygget med NAN latch Flip-Flops Master-slave flip-flop JK flip-flop T flip-flop 2 efinisjoner Kombinatorisk
MIK 200 Anvendt signalbehandling, 2012. Lab. 5, brytere, lysdioder og logikk.
 Stavanger, 25. januar 2012 Det teknisknaturvitenskapelige fakultet MIK 200 Anvendt signalbehandling, 2012. Lab. 5, brytere, lysdioder og logikk. Vi skal i denne øvinga se litt på brytere, lysdioder og
Stavanger, 25. januar 2012 Det teknisknaturvitenskapelige fakultet MIK 200 Anvendt signalbehandling, 2012. Lab. 5, brytere, lysdioder og logikk. Vi skal i denne øvinga se litt på brytere, lysdioder og
Simulering, syntese og verifikasjon (Max kap. 19)
") Simulering, syntese og verifikasjon (Max kap. 19) Innhold: Simuleringsmetoder Hendelsesbasert Cyclebasert Plassering av design i FPGA (syntese) Verifikasjon INF3430 - H11 1 Hendelsdrevet simulering 10ps
Simulering, syntese og verifikasjon (Max kap. 19) Innhold: Simuleringsmetoder Hendelsesbasert Cyclebasert Plassering av design i FPGA (syntese) Verifikasjon INF3430 - H11 1 Hendelsdrevet simulering 10ps
Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE
 Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...4 1.1 Designflyt for programmerbar logikk... 5 1.1.1.1 Design entry... 5 1.1.1.2 Register Transfer Level (RTL)-simulering...
Designflyt Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...4 1.1 Designflyt for programmerbar logikk... 5 1.1.1.1 Design entry... 5 1.1.1.2 Register Transfer Level (RTL)-simulering...
I oppgave 1 skal det prøves ut en binærteller i en integrert krets (IC). Telleren som skal brukes er SN74HC393N, hvor
. Telleren som skal brukes er SN74HC393N, hvor") Lab 8 Datakonvertering Oppgave 1: Binærteller I oppgave 1 skal det prøves ut en binærteller i en integrert krets (IC). Telleren som skal brukes er SN74HC393N, hvor SN står for fabrikant: Texas Instruments.
Lab 8 Datakonvertering Oppgave 1: Binærteller I oppgave 1 skal det prøves ut en binærteller i en integrert krets (IC). Telleren som skal brukes er SN74HC393N, hvor SN står for fabrikant: Texas Instruments.
Høgskolen i Sør-Trøndelag Avdeling for teknologi
 Høgskolen i Sør-Trøndelag Avdeling for teknologi Eksamensdato: 3. desember 2010 Program for elektro- og datateknikk Varighet: Emnekode: Emnenavn: 5 timer EDT304T Digital Systemkonstruksjon Studiepoeng:
Høgskolen i Sør-Trøndelag Avdeling for teknologi Eksamensdato: 3. desember 2010 Program for elektro- og datateknikk Varighet: Emnekode: Emnenavn: 5 timer EDT304T Digital Systemkonstruksjon Studiepoeng:
INF1400. Sekvensiell logikk del 1
 INF4 Sekvensiell logikk del Hovedpunkter Låsekretser (latch er) SR latch med NOR-porter S R latch med NAN-porter -latch Flip-flop Master-slave -flip-flop JK flip-flop T-flip-flop Omid Mirmotahari 3 efinisjoner
INF4 Sekvensiell logikk del Hovedpunkter Låsekretser (latch er) SR latch med NOR-porter S R latch med NAN-porter -latch Flip-flop Master-slave -flip-flop JK flip-flop T-flip-flop Omid Mirmotahari 3 efinisjoner
F4 IN HDL. Yngve Hafting,
 F4 IN2060 2018 HDL Yngve Hafting, yngveha@ifi.uio.no Formål Kort om emnet Emnet tar for seg prinsipper i digital design, som kombinatorisk og sekvensiell logikk, tilstandsmaskiner og digitale byggeblokker,
F4 IN2060 2018 HDL Yngve Hafting, yngveha@ifi.uio.no Formål Kort om emnet Emnet tar for seg prinsipper i digital design, som kombinatorisk og sekvensiell logikk, tilstandsmaskiner og digitale byggeblokker,
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO et matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 igital teknologi Eksamensdag: 3. desember 2008 Tid for eksamen: 14:30 17:30 Oppgavesettet er på 5 sider Vedlegg: 1 Tillatte
UNIVERSITETET I OSLO et matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 igital teknologi Eksamensdag: 3. desember 2008 Tid for eksamen: 14:30 17:30 Oppgavesettet er på 5 sider Vedlegg: 1 Tillatte
INF3430/4430. Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer
 INF3430/4430 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer 2005-10-26 Agenda Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard
INF3430/4430 Funksjoner og prosedyrer Standardbiblioteker Komplekse sekvensielle systemer 2005-10-26 Agenda Funksjoner og operatorer Prosedyrer Begrepet overload Biblioteker Package/package body Standard
Avdeling for ingeniørutdanning Institutt for teknologi
 Avdeling for ingeniørutdanning Institutt for teknologi Oppgavetittel: Obligatorisk prosjektoppgave 1 Fag(nr./navn): Maskinvareutvikling DMVA-2060 Gruppemedlemmer: T. Alexander Lystad Faglærer: Zoran Dokic
Avdeling for ingeniørutdanning Institutt for teknologi Oppgavetittel: Obligatorisk prosjektoppgave 1 Fag(nr./navn): Maskinvareutvikling DMVA-2060 Gruppemedlemmer: T. Alexander Lystad Faglærer: Zoran Dokic
Designflyt Utviklingsverktøyene Questa(Modelsim) og Xilinx ISE. Versjon 1.5/
 og Xilinx ISE. Versjon 1.5/") Designflyt Utviklingsverktøyene Questa(Modelsim) og Xilinx ISE Versjon 1.5/19.08.2015 Designflyt. Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...4 1.1 Designflyt for programmerbar
Designflyt Utviklingsverktøyene Questa(Modelsim) og Xilinx ISE Versjon 1.5/19.08.2015 Designflyt. Utviklingsverktøyene Modelsim og Xilinx ISE 1 Designflyt og verktøy...4 1.1 Designflyt for programmerbar
Dagens temaer. Sekvensiell logikk: Kretser med minne. D-flipflop: Forbedring av RS-latch
 Dagens temaer Sekvensiell logikk: Kretser med minne RS-latch: Enkleste minnekrets D-flipflop: Forbedring av RS-latch Presentasjon av obligatorisk oppgave (se også oppgaveteksten på hjemmesiden). 9.9.3
Dagens temaer Sekvensiell logikk: Kretser med minne RS-latch: Enkleste minnekrets D-flipflop: Forbedring av RS-latch Presentasjon av obligatorisk oppgave (se også oppgaveteksten på hjemmesiden). 9.9.3
Dagens tema. Dagens tema hentes fra kapittel 3 i Computer Organisation and Architecture. Sekvensiell logikk. Flip-flop er. Tellere og registre
 Dagens tema Dagens tema hentes fra kapittel 3 i Computer Organisation and Architecture Sekvensiell logikk Flip-flop er Tellere og registre Design av sekvensielle kretser (Tilstandsdiagram) 1/19 Sekvensiell
Dagens tema Dagens tema hentes fra kapittel 3 i Computer Organisation and Architecture Sekvensiell logikk Flip-flop er Tellere og registre Design av sekvensielle kretser (Tilstandsdiagram) 1/19 Sekvensiell
Programmerbar logikk. CPLD og FPGA. Fys3270(4270)
") Programmerbar logikk CPLD og FPGA Agenda CPLD (Complex PLD) Arkitektur CPLD familier Timingmodeller Programmering FPGA (Field Programable Gate Array) Arkitekturer Eksempel på FPGA teknologier Antifuse
Programmerbar logikk CPLD og FPGA Agenda CPLD (Complex PLD) Arkitektur CPLD familier Timingmodeller Programmering FPGA (Field Programable Gate Array) Arkitekturer Eksempel på FPGA teknologier Antifuse
Design med ASIC og FPGA (Max kap.7 og 18)
") Design med ASIC og FPGA (Max kap.7 og 18) Innhold: Begrensninger/muligheter å ta hensyn til ved FPGA design som en normalt slipper å tenke på med ASIC design. Migrering mellom FPGA og ASIC INF3430 - H12
Design med ASIC og FPGA (Max kap.7 og 18) Innhold: Begrensninger/muligheter å ta hensyn til ved FPGA design som en normalt slipper å tenke på med ASIC design. Migrering mellom FPGA og ASIC INF3430 - H12
UNIVERSITETET I OSLO
 Side 1 av 4 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF3430/INF4430 Digital systemkonstruksjon Eksamensdag: 30. november 2005 Tid for eksamen: 9-12 Oppgavesettet er
Side 1 av 4 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF3430/INF4430 Digital systemkonstruksjon Eksamensdag: 30. november 2005 Tid for eksamen: 9-12 Oppgavesettet er
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 Digital teknologi Eksamensdag: 3. desember 2008 Tid for eksamen: 14:30 17:30 Oppgavesettet er på 5 sider Vedlegg: 1 Tillatte
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1400 Digital teknologi Eksamensdag: 3. desember 2008 Tid for eksamen: 14:30 17:30 Oppgavesettet er på 5 sider Vedlegg: 1 Tillatte
UNIVERSITETET I OSLO.
 UNIVERSITETET I OSLO. Det matematisk - naturvitenskapelige fakultet. Eksamen i : FY-IN 204 Eksamensdag : 2 september 1998 (utsatt grunnet streik V-98) Tid for eksamen : l.0900-1500 Oppgavesettet er på
UNIVERSITETET I OSLO. Det matematisk - naturvitenskapelige fakultet. Eksamen i : FY-IN 204 Eksamensdag : 2 september 1998 (utsatt grunnet streik V-98) Tid for eksamen : l.0900-1500 Oppgavesettet er på
SIE 4005, 8/10 (3. Forelesn.)
") SIE 4005, 8/10 (3. Forelesn.) Andre forelesning: litt repetisjon 7.7 Arithmetic / Logic unit 7.8 The Shifter 7.9 Datapath representation 7.10 The control word 7.11 Pipelined datapath Tredje forelesning:
SIE 4005, 8/10 (3. Forelesn.) Andre forelesning: litt repetisjon 7.7 Arithmetic / Logic unit 7.8 The Shifter 7.9 Datapath representation 7.10 The control word 7.11 Pipelined datapath Tredje forelesning:
Installasjon IDT 120. Art. nr: 320 454
 Installasjon IDT 120 Art. nr: 320 454 1. Installasjon 1.1 Soner IDT 128 installeres på steder der personer må passere når de forlater et rom eller en sone. IDT 128 sender ut et magnetfelt i en viss størrelse
Installasjon IDT 120 Art. nr: 320 454 1. Installasjon 1.1 Soner IDT 128 installeres på steder der personer må passere når de forlater et rom eller en sone. IDT 128 sender ut et magnetfelt i en viss størrelse
FYS 3270(4270) Data-assistert konstruksjon av kretselektronikk (tidligere Fys 329) Fys3270(4270)
 Data-assistert konstruksjon av kretselektronikk (tidligere Fys 329) Fys3270(4270)") FYS 3270(4270) Data-assistert konstruksjon av kretselektronikk (tidligere Fys 329) Forelesere Jørgen Norendal, Universitetslektor Fieldbus International AS Jan Kenneth Bekkeng, Stipendiat Kosmisk fysikk
FYS 3270(4270) Data-assistert konstruksjon av kretselektronikk (tidligere Fys 329) Forelesere Jørgen Norendal, Universitetslektor Fieldbus International AS Jan Kenneth Bekkeng, Stipendiat Kosmisk fysikk
TFE4101 Krets- og Digitalteknikk Høst 2016
 Norges teknisk naturvitenskapelige universitet Institutt for elektronikk og telekomunikasjon TFE40 Krets- og Digitalteknikk Høst 206 Løsningsforslag Øving 6 Teknologi-mapping a) Siden funksjonen T er på
Norges teknisk naturvitenskapelige universitet Institutt for elektronikk og telekomunikasjon TFE40 Krets- og Digitalteknikk Høst 206 Løsningsforslag Øving 6 Teknologi-mapping a) Siden funksjonen T er på
Elektronikk og programmering av ubrukelige roboter
 Elektronikk og programmering av ubrukelige roboter Elektronikk du (kanskje) bruker i roboten: 1. Microbit = hjernen denne må du ha! Microbit er en såkalt mikrokontroller som vi kan programmere til å få
Elektronikk og programmering av ubrukelige roboter Elektronikk du (kanskje) bruker i roboten: 1. Microbit = hjernen denne må du ha! Microbit er en såkalt mikrokontroller som vi kan programmere til å få
Øving 7: Løsningsforslag (frivillig)
") TFE4 Digitalteknikk med kretsteknikk Løsningsforslag til regneøving 7 vårsemester 7 Øving 7: Løsningsforslag (frivillig) Oppgave Oppgave (Flanke- og nivåstyrte vipper) a) Vi ser fra figuren at pulstog
TFE4 Digitalteknikk med kretsteknikk Løsningsforslag til regneøving 7 vårsemester 7 Øving 7: Løsningsforslag (frivillig) Oppgave Oppgave (Flanke- og nivåstyrte vipper) a) Vi ser fra figuren at pulstog
Dagens temaer. Architecture INF ! Dagens temaer hentes fra kapittel 3 i Computer Organisation and
 Dagens temaer! Dagens temaer hentes fra kapittel 3 i Computer Organisation and Architecture! Enkoder/demultiplekser (avslutte fra forrige gang)! Kort repetisjon 2-komplements form! Binær addisjon/subtraksjon!
Dagens temaer! Dagens temaer hentes fra kapittel 3 i Computer Organisation and Architecture! Enkoder/demultiplekser (avslutte fra forrige gang)! Kort repetisjon 2-komplements form! Binær addisjon/subtraksjon!
Design med ASIC og FPGA (Max kap.7 og 18)
") Design med ASIC og FPGA (Max kap.7 og 18) Innhold: Begrensninger/muligheter å ta hensyn til ved FPGA design som en normalt slipper å tenke på med ASIC design. Migrering mellom FPGA og ASIC INF3430 - H10
Design med ASIC og FPGA (Max kap.7 og 18) Innhold: Begrensninger/muligheter å ta hensyn til ved FPGA design som en normalt slipper å tenke på med ASIC design. Migrering mellom FPGA og ASIC INF3430 - H10
Test av USB IO-enhet. Regulering og HMI.
 Høgskolen i Østfold Avdeling for informasjonsteknologi Lab Industriell IT Fag ITD 30005 Industriell IT Laboppgave 3. Gruppe-oppgave Test av USB IO-enhet. Regulering og HMI. Skal gjennomføres i løpet av
Høgskolen i Østfold Avdeling for informasjonsteknologi Lab Industriell IT Fag ITD 30005 Industriell IT Laboppgave 3. Gruppe-oppgave Test av USB IO-enhet. Regulering og HMI. Skal gjennomføres i løpet av
EKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK
 Side 1 av 13 INSTITUTT FOR ELEKTRONIKK OG TELEKOMMUNIKASJON EKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK Faglig kontakt: Peter Svensson (1 3.5) / Kjetil Svarstad (3.6 4) Tlf.: 995 72 470 / 458 54 333
Side 1 av 13 INSTITUTT FOR ELEKTRONIKK OG TELEKOMMUNIKASJON EKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK Faglig kontakt: Peter Svensson (1 3.5) / Kjetil Svarstad (3.6 4) Tlf.: 995 72 470 / 458 54 333
Gruppe(r): 2EY 30.05.02. Eksamenstid, fra-til: 09 00-14 00 Eksamensoppgaven består av. Antall sider: 4 (Inkludert denne)
: 2EY 30.05.02. Eksamenstid, fra-til: 09 00-14 00 Eksamensoppgaven består av. Antall sider: 4 (Inkludert denne)") HØGSKOLEN I OSLO Avdeling for ingeniørutdanning EKSAMENSOPPGAVE Fag: ELEKTRONIKK II Fagnr: SO313E Faglig veileder: K. H. Nygård, V. Tyssø Gruppe(r): 2EY Dato: 30.05.02 Eksamenstid, fra-til: 09 00-14 00
HØGSKOLEN I OSLO Avdeling for ingeniørutdanning EKSAMENSOPPGAVE Fag: ELEKTRONIKK II Fagnr: SO313E Faglig veileder: K. H. Nygård, V. Tyssø Gruppe(r): 2EY Dato: 30.05.02 Eksamenstid, fra-til: 09 00-14 00
Agenda Funksjoner og prosedyrer. Funksjoner
 Aga Funksjoner og prosedyrer Funksjoner Operatorer Standard funksjoner/operatorer Overloading Package og Package body Operator inferencing Prosedyrer Side 1 Funksjoner(1) Benyttes mye i modeller for simulering
Aga Funksjoner og prosedyrer Funksjoner Operatorer Standard funksjoner/operatorer Overloading Package og Package body Operator inferencing Prosedyrer Side 1 Funksjoner(1) Benyttes mye i modeller for simulering
KONTINUASJONSEKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK - LF
 Side 1 av 20 INSTITUTT FOR ELEKTRONIKK OG TELEKOMMUNIKASJON KONTINUASJONSEKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK - LF Faglig kontakt: Peter Svensson (1 3.5) / Kjetil Svarstad (3.6 4) Tlf.: 995 72
Side 1 av 20 INSTITUTT FOR ELEKTRONIKK OG TELEKOMMUNIKASJON KONTINUASJONSEKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK - LF Faglig kontakt: Peter Svensson (1 3.5) / Kjetil Svarstad (3.6 4) Tlf.: 995 72
RAPPORT LAB 3 TERNING
 TFE4110 Digitalteknikk med kretsteknikk RAPPORT LAB 3 TERNING av June Kieu Van Thi Bui Valerij Fredriksen Labgruppe 201 Lab utført 09.03.2012 Rapport levert: 16.04.2012 FAKULTET FOR INFORMASJONSTEKNOLOGI,
TFE4110 Digitalteknikk med kretsteknikk RAPPORT LAB 3 TERNING av June Kieu Van Thi Bui Valerij Fredriksen Labgruppe 201 Lab utført 09.03.2012 Rapport levert: 16.04.2012 FAKULTET FOR INFORMASJONSTEKNOLOGI,
EKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK, LF DIGITALTEKNIKKDELEN AV EKSAMEN (VERSJON 1)
") Side 1 av 14 INSTITUTT FOR ELEKTRONIKK OG TELEKOMMUNIKASJON EKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK, LF DIGITALTEKNIKKDELEN AV EKSAMEN (VERSJON 1) Faglig kontakt: Ragnar Hergum (1 3.5) / Per Gunnar
Side 1 av 14 INSTITUTT FOR ELEKTRONIKK OG TELEKOMMUNIKASJON EKSAMEN I FAG TFE4101 KRETS- OG DIGITALTEKNIKK, LF DIGITALTEKNIKKDELEN AV EKSAMEN (VERSJON 1) Faglig kontakt: Ragnar Hergum (1 3.5) / Per Gunnar
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication FPGA/ASIC koderegler og designmetodikk i KDA Hvordan en FPGA designer kan være minst mulig på
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication FPGA/ASIC koderegler og designmetodikk i KDA Hvordan en FPGA designer kan være minst mulig på
LABORATORIEOPPGAVE NR 6. Logiske kretser - DTL (Diode-Transistor Logic) Læringsmål: Oppbygning
 Læringsmål: Oppbygning") LABORATORIEOPPGAVE NR 6 Logiske kretser - DTL (Diode-Transistor Logic) Læringsmål: Gi en kort innføring i de elektriske egenskapene til digiale kretser. Delmål: Studentene skal etter gjennomført laboratorieoppgave:
LABORATORIEOPPGAVE NR 6 Logiske kretser - DTL (Diode-Transistor Logic) Læringsmål: Gi en kort innføring i de elektriske egenskapene til digiale kretser. Delmål: Studentene skal etter gjennomført laboratorieoppgave:
VHDL En kjapp introduksjon VHDL. Oversikt. VHDL versus C(++)/Java
/Java") Oversikt VHDL En kjapp introduksjon Definisjoner Designparadigmer Generell VHDL-struktur Dataflow -beskrivelse Structural -beskrivelse Behaviour -beskrivelse Objekter /datatyper Operatorer Tips for syntese
Oversikt VHDL En kjapp introduksjon Definisjoner Designparadigmer Generell VHDL-struktur Dataflow -beskrivelse Structural -beskrivelse Behaviour -beskrivelse Objekter /datatyper Operatorer Tips for syntese
IN1060: Bruksorientert design
 IN1060: Bruksorientert design Ukeoppgaver i Arduino - uke 2 Vår 2018 Innhold 1. Analoge signaler 2 1.1. Lese og skrive analoge signaler 2 1.2. Potensiometer og serial monitor 2 1.3. Pulserende lys 3 1.4.
IN1060: Bruksorientert design Ukeoppgaver i Arduino - uke 2 Vår 2018 Innhold 1. Analoge signaler 2 1.1. Lese og skrive analoge signaler 2 1.2. Potensiometer og serial monitor 2 1.3. Pulserende lys 3 1.4.
Obligatorisk oppgave 1: Regneklynge
 Obligatorisk oppgave 1: Regneklynge INF1010 Frist: mandag 6. februar 2017 kl. 12:00 Versjon 1.0 (62f8e31 ) Innhold 1 Innledning 1 2 Regneklyngens bestanddeler 2 3 Datastrukturtegning 3 4 Maksimal teoretisk
Obligatorisk oppgave 1: Regneklynge INF1010 Frist: mandag 6. februar 2017 kl. 12:00 Versjon 1.0 (62f8e31 ) Innhold 1 Innledning 1 2 Regneklyngens bestanddeler 2 3 Datastrukturtegning 3 4 Maksimal teoretisk
Industriell datastyring Øving 1, PLS
 NTNU Institutt for teknisk kybernetikk KR 2003 Fag TTK4120 Industriell datastyring Øving 1, PLS Obligatorisk øving Labveiledning undervisningsuke 3-5 Godkjenning av lab skjer på salen av stud.ass på sal
NTNU Institutt for teknisk kybernetikk KR 2003 Fag TTK4120 Industriell datastyring Øving 1, PLS Obligatorisk øving Labveiledning undervisningsuke 3-5 Godkjenning av lab skjer på salen av stud.ass på sal
FPGA/ASIC koderegler og designmetodikk Hvordan en FPGA designer kan være minst mulig på lab en
 FPGA/ASIC koderegler og designmetodikk Hvordan en FPGA designer kan være minst mulig på lab en 1 Agenda Utviklingsprosessen for FPGA og ASIC i Kongsberg Defence Systems Design regler Parallellisering og
FPGA/ASIC koderegler og designmetodikk Hvordan en FPGA designer kan være minst mulig på lab en 1 Agenda Utviklingsprosessen for FPGA og ASIC i Kongsberg Defence Systems Design regler Parallellisering og
Hva er styring og regulering
 Hva er styring og regulering Fagstoff ODD STÅLE VIKENE Listen [1] Hva er forskjellen på styring og regulering? Her får du en gjennomgang av prinsipper og begreper knyttet til styring og regulering av prosesser.
Hva er styring og regulering Fagstoff ODD STÅLE VIKENE Listen [1] Hva er forskjellen på styring og regulering? Her får du en gjennomgang av prinsipper og begreper knyttet til styring og regulering av prosesser.
KYBERNETIKKLABORATORIET. FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW Temperaturmålinger BNC-2120
 KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist