Sammenlikningav simuleringsverktøyfor reguleringsteknikk
|
|
|
- Inger-Lise Martine Olafsen
- 8 år siden
- Visninger:
Transkript
1 Presentasjon ved NFA-dagene Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen Høgskolen i Telemark
2 Innhold: Eksempler på min egen bruk av simuleringsverktøy Industriprosjekt: Posisjonsregulering av luftaktuert undervanns løftesystem Opplæring: MPC-regulering av varmluftprosess Opplæring: Simuleringsbiblioteket SimView Noen aktuelle verktøy LabVIEW Simulink Scicos Dymola Oppsummering
3 Hvorforsimulere? Design Ufarlig testing Billig testing Opplæring
4 Innhold: Eksempler på min egen bruk av simuleringsverktøy Industriprosjekt: Posisjonsregulering av luftaktuert undervanns løftesystem Opplæring: MPC-regulering av varmluftprosess Opplæring: Simuleringsbiblioteket SimView Noen aktuelle verktøy LabVIEW Simulink Scicos Dymola Oppsummering
5 Posisjonsregulering av eksperimentelt luftaktuertundervanns løftesystem Løftebag(her utenfor vanntanken)
6 Newtons 2. lov: Prosessmodell: Massebalanse for luft:
7 Reguleringssystemet: PI-regulatorparametre for C1 og C2 ble beregnet fra modell (med Skogestads metode), og systemet ble simulert i LabVIEW.

8 Simulering av løftesystemet (Simulering ble kjørt under foredraget.)
9 Virkelige responser (fra sommeren 2009) Regulatoren som ble designet fra modellen og bekreftet i simuleringer, fungerte med én gang på laben! (Et rørende øyeblikk ) Til høyre er virkelige responser, på det fysiske systemet (forholdene er riktignok ikke eksakt de samme som for simuleringene vist på forrige slide):
10 Video fra eksperiment (sommeren 2009) Løftebagen holdes stabilt på (nær) posisjonsreferansen:
11 Innhold: Eksempler på min egen bruk av simuleringsverktøy Industriprosjekt: Posisjonsregulering av luftaktuert undervanns løftesystem Opplæring: MPC-regulering av varmluftprosess Opplæring: Simuleringsbiblioteket SimView Noen aktuelle verktøy LabVIEW Simulink Scicos Dymola Oppsummering
12 MPC-regulering av varmluftprosess Studentoppgave i masterutdanningen ved HiT: Temperaturregulering med MPC.
13 Model-based Predictive Control (MPC): The Control Design and Simulation module of LabVIEW contains an MPC controller Process model: Optimization criterion: Constraints: (Figures from user manual of Control Design and Simulation module)
14 Matematisk modellering av varmluftprosessen ProsessmodellentrengsiMPC-regulatoren. Modellen skal også benyttes til simulatorbasert utprøving av reguleringssystemet. Prosessens sprangrespons: Prosessens sprangrespons tyder på tidskonstantmed dødtid : Forsterkning = 3,5 Sprang i styresignalet: Tidskonstant = 22 sek Tidsforsinkelse = 2 sek
15 Verifikasjon av modellen, og muligens fin-tuning av modellparametrene, kan gjøres ved å kjøre en simulator i parallell med den fysiske prosessen: Determegetgod overensstemmelse mellom virkelig og simulert temperaturrespons. Detteviserat modellenergod (nøyaktig). Kan også bruke funksjoner fra systemidentifikasjon for å finne en modell automatisk
16 Er simulerte og virkelige responser like? Simuleringer ble kjørt under foredraget, mens virkelige responser er fra et tidligere eksperiment. La oss se om responsene er like
17 Følging av sprangprofil med PI-regulator Simulert respons: Virkelig respons: Simulert og virkelig respons er veldig like.

18 Følging av sprangprofil med MPC-regulator Simulert respons: Virkelig respons: Simulert og virkelig respons er veldig like.
19 Følging av rampeprofil med PI-regulator Simulert respons: Virkelig respons: Simulert og virkelig respons er veldig like.
20 Følging av rampeprofil med MPC-regulator Simulert respons: Virkelig respons: Simulert og virkelig respons er veldig like.
21 Vi har sett at simulerte og virkelige respons er veldig like. Vi har sett at simulerte og virkelige respons er veldig like. Simulatorbasert utprøving gir altså nøyaktige resultater! ( Når modellen er nøyaktig.)
22 Innhold: Eksempler på min egen bruk av simuleringsverktøy Industriprosjekt: Posisjonsregulering av luftaktuert undervanns løftesystem Opplæring: MPC-regulering av varmluftprosess Opplæring: Simuleringsbiblioteket SimView Noen aktuelle verktøy LabVIEW Simulink Scicos Dymola Oppsummering
23 Simuleringsbiblioteket SimView (for undervisning) 47 simulatorer for dynamiske systemer, reguleringsteknikk og signalbehandling utviklet i LabVIEW. Fritt tilgjengelige fra Krever kun at LabVIEW Run-time Engine(gratis) er installert.

24 En del av En del av simulatorene i SimView:

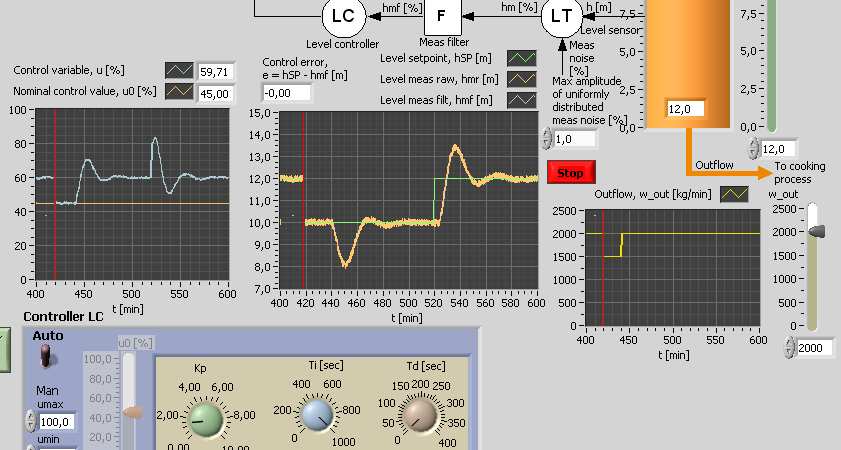
25 Eksempel: Simulering av PID-nivåreguleringssystem
26 Eksempel: Simulering av sekvensstyring
27 Innhold: Eksempler på min egen bruk av simuleringsverktøy Industriprosjekt: Posisjonsregulering av luftaktuert undervanns løftesystem Opplæring: MPC-regulering av varmluftprosess Opplæring: Simuleringsbiblioteket SimView Noen aktuelle verktøy LabVIEW Simulink Scicos Dymola Oppsummering
28 Skal simulere følgende reguleringssystem (i LabVIEW, Simulink og Scicos): Ref = sprang (amplitude 1) Kp= 0,5 Ti = 1 Td=0 PI-regulator K = 1 T = 1 Tau = 1 Tidskonstant med dødtid
29 LabVIEW Utviklingsverktøy for hovedsakelig PC-baserte systemer for styring og måling, inkl. signalbehandling og simulering. Produseres av National Instruments (ni.com). Programmeringen er grafisk, dvs. med funksjonsblokker som koples sammen. Control Design and Simulation Module i LabVIEW inneholder funksjoner for simulering av dynamiske systemer (a la Simulink). Info om simulatorutvikling i LabVIEW fins bl.a. på

30 Noen blokker på Simulation-paletten i LabVIEW


31 Eksempel: PID-reguleringssystem for simulert prosess bestående av tidskonstant og dødtid Programmets frontpanel(brukergrensesnitt):
32 Eksempel forts: Programmets blokkdiagram
33 S i m u l i n k Simuleringsverktøy basert på blokkdiagramrepresentasjon av matematisk modell. Produseres av The Mathworks(mathworks.com). Forutsetter at Matlab er installert. Info om simulatorutvikling med Simulink fins bl.a. på
34 Blokkbiblioteket i Simulink

35 Eksempel(Simulink): PID-reguleringssystem for simulert prosess bestående av tidskonstant og dødtid Parameterverdier kan enten skrives rett inn i blokkenes parametervindu eller generes som variable i et Matlab-skript.
36 Scicos Simuleringsverktøy basert på blokkdiagramrepresentasjon av matematisk modell. (Likner på Simulink.) Gratis! Info om simulatorutvikling med Scicos fins bl.a. på
37 Scicos: Paletter med modell- og funksjonsblokker
.")
38 Eksempel(Scicos): PID-reguleringssystem for simulert prosess bestående av tidskonstant og dødtid Parameterverdier kan enten skrives rett inn i blokkenes parametervindu eller genereres som variable i et skriptvindu (kalt Context).
39 Dymola Simuleringsverktøy basert på at fysiske komponenter(for eksempel motor, last, gir, signalkilde, vinkelsensor) og funksjonsblokker (for eksempel PID-regulator, lavpassfilter) koples sammen som om det var et fysisk system som skulle bygges. Dymolasørger selv for å manipulere de underliggende matematiske modellene slik at de blir løsbare, bl.a. ved at algebraiske løkker løses. Dymolaer en implementering av det standardiserte objektbaserte modelleringsspråket Modelica.

40 Eksempel(Dymola): PID-reguleringssystem for simulert posisjonsservo for permanentmagnetisert DC-motor Modellen er bygd opp av komponenter i pakkebiblioteket(til venstre).


41 Eksempel(Dymola): Simulertposisjonsresponsettersprang i posisjonsreferansen Hvilke som helst variable i modellen kan plottes i samme eller egne vinduer. Brukeren svitsjer mellom Modeling-modus og Simulationmodus med knappen nede til høyre.
42 Oppsummering LabVIEW: Meget god funksjonalitet. Lekker GUI. Litt tungvint(må beherske LabVIEW-programmering). Enkelt å kjøre simulering i sann tid eller I skalert tid. Simulink: Meget god funksjonalitet. Enkelt å bruke. Sanntidssimulering krever Real-time Workshop. Scicos: Ok funksjonalitet. Enkelt. Gratis! Sanntidssimulering mulig. Dymola: God funksjonalitet. Ferdiglagde fysikkbaserte modellobjekter som kan koples sammen, uten å tenke på matematikken. Krever meget god modellinnsikt for å vite hva de mange parametrene i modellblokkene betyr. Sanntidssimulering er mulig.
Reguleringsteknikk. Finn Aakre Haugen. 16. juni 2014
 Reguleringsteknikk Finn Aakre Haugen 16. juni 2014 1 2 F. Haugen: Reguleringsteknikk Innhold 1 Innledning til reguleringsteknikk 15 1.1 Grunnleggende begreper..................... 15 1.2 Hvaerreguleringgodtfor?...
Reguleringsteknikk Finn Aakre Haugen 16. juni 2014 1 2 F. Haugen: Reguleringsteknikk Innhold 1 Innledning til reguleringsteknikk 15 1.1 Grunnleggende begreper..................... 15 1.2 Hvaerreguleringgodtfor?...
Simulering i MATLAB og SIMULINK
 Simulering i MATLAB og SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 13. november 2004 1 2 TechTeach Innhold 1 Simulering av differensiallikningsmodeller 7 1.1 Innledning...
Simulering i MATLAB og SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 13. november 2004 1 2 TechTeach Innhold 1 Simulering av differensiallikningsmodeller 7 1.1 Innledning...
Systemidentifikasjon Oppgaver
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN, 2012.03.16 Faculty of Technology, Postboks
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN, 2012.03.16 Faculty of Technology, Postboks
48 Praktisk reguleringsteknikk
 48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
Finn Haugen. Oppgaver i reguleringsteknikk 1. Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i industrianlegg.
 Finn Haugen. Oppgaver i reguleringsteknikk 1 Oppgave 0.1 Hvilke variable skal reguleres? Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i industrianlegg. Oppgave 0.2 Blokkdiagram
Finn Haugen. Oppgaver i reguleringsteknikk 1 Oppgave 0.1 Hvilke variable skal reguleres? Nevn 5 variable som du vet eller antar kan være gjenstand for regulering i industrianlegg. Oppgave 0.2 Blokkdiagram
Simuleringsalgoritmer
 Simuleringsalgoritmer Finn Aakre Haugen, dosent Høgskolen i Telemark 14. september 2015 1 Innledning 1.1 Hva er simulering? Simulering av et system er beregning av tidsresponser vha. en matematisk modell
Simuleringsalgoritmer Finn Aakre Haugen, dosent Høgskolen i Telemark 14. september 2015 1 Innledning 1.1 Hva er simulering? Simulering av et system er beregning av tidsresponser vha. en matematisk modell
Artikkelserien Reguleringsteknikk
 Finn Haugen (finn@techteach.no) 18. november, 2008 Artikkelserien Reguleringsteknikk Dette er artikkel nr. 7 i artikkelserien Reguleringsteknikk: Artikkel 1: Reguleringsteknikkens betydning og grunnprinsipp.
Finn Haugen (finn@techteach.no) 18. november, 2008 Artikkelserien Reguleringsteknikk Dette er artikkel nr. 7 i artikkelserien Reguleringsteknikk: Artikkel 1: Reguleringsteknikkens betydning og grunnprinsipp.
Lineær analyse i SIMULINK
 Lineær analyse i SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 20.12 2002 1 2 Lineær analyse i SIMULINK Innhold 1 Innledning 7 2 Kommandobasert linearisering av modeller 9
Lineær analyse i SIMULINK Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 20.12 2002 1 2 Lineær analyse i SIMULINK Innhold 1 Innledning 7 2 Kommandobasert linearisering av modeller 9
Stabilitetsanalyse i MATLAB og LabVIEW
 Stabilitetsanalyse i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 21.12 2002 1 2 TechTeach Innhold 1 Stabilitetsanalyse i MATLAB og LabVIEW 7 1.1 MATLAB... 7 1.1.1
Stabilitetsanalyse i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 21.12 2002 1 2 TechTeach Innhold 1 Stabilitetsanalyse i MATLAB og LabVIEW 7 1.1 MATLAB... 7 1.1.1
Systemidentifikasjon Oppgaver
 University College of Southeast Norway Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 4 3 Validering...
University College of Southeast Norway Systemidentifikasjon Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 4 3 Validering...
KYBERNETIKKLABORATORIET. FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING
 KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
Inst. for elektrofag og fornybar energi
 Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 3 Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-09-11 Hensikten med denne oppgaven er at du skal bli bedre kjent
Inst. for elektrofag og fornybar energi Fag TELE2001 Reguleringsteknikk Simulink øving 3 Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-09-11 Hensikten med denne oppgaven er at du skal bli bedre kjent
Løsning til eksamen i IA3112 Automatiseringsteknikk
 Høgskolen i Telemark/Finn Haugen (finn.haugen@hit.no). Løsning til eksamen i IA32 Automatiseringsteknikk Eksamensdato: 8. desember 203. Varighet 5 timer. Vekt i sluttkarakteren: 00%. Hjelpemidler: Ingen
Høgskolen i Telemark/Finn Haugen (finn.haugen@hit.no). Løsning til eksamen i IA32 Automatiseringsteknikk Eksamensdato: 8. desember 203. Varighet 5 timer. Vekt i sluttkarakteren: 00%. Hjelpemidler: Ingen
Løsningsforslag til slutteksamen i SESM3401 Styring av mekatroniske systemer
 Høgskolen i Buskerud Løsningsforslag til slutteksamen i SESM3401 Styring av mekatroniske systemer Utarbeidet av Finn Haugen, emnets lærer. Eksamensdato: Mandag 11. desember 2006. Varighet: 4 timer. Vekt
Høgskolen i Buskerud Løsningsforslag til slutteksamen i SESM3401 Styring av mekatroniske systemer Utarbeidet av Finn Haugen, emnets lærer. Eksamensdato: Mandag 11. desember 2006. Varighet: 4 timer. Vekt
NYE METODER FOR REGULERING AV VANNKRAFTANLEGG
 NYE METODER FOR REGULERING AV VANNKRAFTANLEGG - Kan automatisk regulering overta for en lokal spesialist? Jane Solvi, Skagerak Kraft AS Ingvar Andreassen, Skagerak Kraft AS Bernt Lie, Høgskolen i Telemark
NYE METODER FOR REGULERING AV VANNKRAFTANLEGG - Kan automatisk regulering overta for en lokal spesialist? Jane Solvi, Skagerak Kraft AS Ingvar Andreassen, Skagerak Kraft AS Bernt Lie, Høgskolen i Telemark
1 Tidsdiskret PID-regulering
 Finn Haugen (finn@techteach.no), TechTeach (techteach.no) 16.2.02 1 Tidsdiskret PID-regulering 1.1 Innledning Dette notatet gir en kortfattet beskrivelse av analyse av tidsdiskrete PID-reguleringssystemer.
Finn Haugen (finn@techteach.no), TechTeach (techteach.no) 16.2.02 1 Tidsdiskret PID-regulering 1.1 Innledning Dette notatet gir en kortfattet beskrivelse av analyse av tidsdiskrete PID-reguleringssystemer.
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 1 Tillatte hjelpemidler: EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnenavn: Automatiseringsteknikk
Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 1 Tillatte hjelpemidler: EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnenavn: Automatiseringsteknikk
EMAR2101 Reguleringssystemer 1: Øving 3
 Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Øving 3 Oppgave 1 I underkapittel 1.1 i læreboken er det listet opp syv forskjellige formål for reguleringsteknikken,
Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Øving 3 Oppgave 1 I underkapittel 1.1 i læreboken er det listet opp syv forskjellige formål for reguleringsteknikken,
KYBERNETIKKLABORATORIET. FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW Temperaturmålinger BNC-2120
 KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
SLUTTPRØVE. EMNEANSVARLIG: Finn Aakre Haugen. Tlf Epost: Antall sider: 14 (medregnet denne forsiden)
") Høgskolen i Telemark Avdeling for teknologiske fag SLUTTPRØVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Aakre Haugen. Tlf. 9701915. Epost: finn.haugen@hit.no. KLASSE(R): Sluttprøven består
Høgskolen i Telemark Avdeling for teknologiske fag SLUTTPRØVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Aakre Haugen. Tlf. 9701915. Epost: finn.haugen@hit.no. KLASSE(R): Sluttprøven består
Løsningsforslag til sluttprøven i emne IA3112 Automatiseringsteknikk
 Høgskolen i Telemark. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no). Løsningsforslag til sluttprøven i emne IA3 Automatiseringsteknikk Sluttprøvens dato: 5. desember 04. Varighet 5 timer. Vekt
Høgskolen i Telemark. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no). Løsningsforslag til sluttprøven i emne IA3 Automatiseringsteknikk Sluttprøvens dato: 5. desember 04. Varighet 5 timer. Vekt
SIMULERINGSNOTAT. Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 01. Laget av Torbjørn Morken Øyvind Eklo
 SIMULERINGSNOTAT Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 01 Laget av Torbjørn Morken Øyvind Eklo Høgskolen i Sør-Trøndelag 2015 Sammendrag Simulering av nivåregulering av tank ved
SIMULERINGSNOTAT Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 01 Laget av Torbjørn Morken Øyvind Eklo Høgskolen i Sør-Trøndelag 2015 Sammendrag Simulering av nivåregulering av tank ved
Control Engineering. State-space Models. Hans-Petter Halvorsen
 Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Til: Aktuelle studenter for Cyberneticas studentprogram Antall sider: 5 Dato: 2014-11-10
 Address: Cybernetica AS Leirfossveien 27 N-7038 Trondheim Norway Phone.: +47 73 82 28 70 Fax: +47 73 82 28 71 STUDENTOPPGAVER Til: Aktuelle studenter for Cyberneticas studentprogram Antall sider: 5 Dato:
Address: Cybernetica AS Leirfossveien 27 N-7038 Trondheim Norway Phone.: +47 73 82 28 70 Fax: +47 73 82 28 71 STUDENTOPPGAVER Til: Aktuelle studenter for Cyberneticas studentprogram Antall sider: 5 Dato:
Tilstandsrommodeller. Hans- Pe1er Halvorsen, M.Sc.
 Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner
Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 15 Tillatte hjelpemidler: Emnenavn: Automatiseringsteknikk
BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 15 Tillatte hjelpemidler: Emnenavn: Automatiseringsteknikk
Inst. for elektrofag og fornybar energi
 Inst. for elektrofag og fornybar energi Utarbeidet: PHv Fag TELE2001 Reguleringsteknikk Revidert sist Fredrik Dessen Tank 4 øving 2 2015-09-21 I denne oppgaven skal du bli mer kjent med simuleringsprogrammet
Inst. for elektrofag og fornybar energi Utarbeidet: PHv Fag TELE2001 Reguleringsteknikk Revidert sist Fredrik Dessen Tank 4 øving 2 2015-09-21 I denne oppgaven skal du bli mer kjent med simuleringsprogrammet
ù [rad/sek] h O [db] o o o o o o o o o o o
![ù [rad/sek] h O [db] o o o o o o o o o o o](/thumbs/74/70925277.jpg "ù [rad/sek] h O [db] o o o o o o o o o o o") D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov6_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 24 og 25 (Øving 6) Oppgave 24 Innjustering i frekvensplanet.
D:\Per\Fag\Regtek\Oppgavebok\4 Løsning på øving\reglov6_2014.wpd Fag TELE2001 Reguleringsteknikk HIST,EDT Juni -14 PHv Løsningsforslag oppgavene 24 og 25 (Øving 6) Oppgave 24 Innjustering i frekvensplanet.
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen (9701915). Emnenavn: Automatiseringsteknikk Tid fra / til: 03. desember 018. Kl. 09:00-14:00
BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: IA311 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen (9701915). Emnenavn: Automatiseringsteknikk Tid fra / til: 03. desember 018. Kl. 09:00-14:00
Reguleringsutstyr. Kapittel 3. 3.1 Prosessregulatorer
 Kapittel 3 Reguleringsutstyr Dette underkapitlet gir en oversikt over forskjellig reguleringsutstyr i form av kommersielle regulatorer og (prosess)styringssystemer og liknende, det vil si det utstyret
Kapittel 3 Reguleringsutstyr Dette underkapitlet gir en oversikt over forskjellig reguleringsutstyr i form av kommersielle regulatorer og (prosess)styringssystemer og liknende, det vil si det utstyret
Eksamensoppgave i TELE2001 Reguleringsteknikk
 Fakultet for teknologi Eksamensoppgave i TELE2001 Reguleringsteknikk Faglig kontakt under eksamen: Fredrik Dessen Tlf.: 48159443 Eksamensdato: 7. juni 2016 Eksamenstid (fra-til): 09:00 til 14:00 Hjelpemiddelkode/Tillatte
Fakultet for teknologi Eksamensoppgave i TELE2001 Reguleringsteknikk Faglig kontakt under eksamen: Fredrik Dessen Tlf.: 48159443 Eksamensdato: 7. juni 2016 Eksamenstid (fra-til): 09:00 til 14:00 Hjelpemiddelkode/Tillatte
Hvilke programmer fins brukbarhet og brukerterskel
 Hvilke programmer fins brukbarhet og brukerterskel Natasa Nord, førsteamanuensis Institutt for Energi- og Prosess Teknikk Hvorfor simuleringsverktøy for ZEB? Simuleringsverktøy for ZEB løsninger er nødvendige
Hvilke programmer fins brukbarhet og brukerterskel Natasa Nord, førsteamanuensis Institutt for Energi- og Prosess Teknikk Hvorfor simuleringsverktøy for ZEB? Simuleringsverktøy for ZEB løsninger er nødvendige
EDT211T-A Reguleringsteknikk PC øving 5: Løsningsforslag
 EDT2T-A Reguleringsteknikk PC øving 5: Løsningsforslag Til simuleringene trengs en del parametre som areal i tanken, ventilkonstanter osv. Det er som oftest en stor fordel å forhåndsdefinere disse i Matlab,
EDT2T-A Reguleringsteknikk PC øving 5: Løsningsforslag Til simuleringene trengs en del parametre som areal i tanken, ventilkonstanter osv. Det er som oftest en stor fordel å forhåndsdefinere disse i Matlab,
Tilstandsestimering Oppgaver
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks 203,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN, 2012.01.27 Faculty of Technology, Postboks 203,
Test av USB IO-enhet. Regulering og HMI.
 Høgskolen i Østfold Avdeling for informasjonsteknologi Lab Industriell IT Fag ITD 30005 Industriell IT Laboppgave 3. Gruppe-oppgave Test av USB IO-enhet. Regulering og HMI. Skal gjennomføres i løpet av
Høgskolen i Østfold Avdeling for informasjonsteknologi Lab Industriell IT Fag ITD 30005 Industriell IT Laboppgave 3. Gruppe-oppgave Test av USB IO-enhet. Regulering og HMI. Skal gjennomføres i løpet av
Control Engineering. MathScript. Hans-Petter Halvorsen
 Control Engineering MathScript Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie, Parallel,
Control Engineering MathScript Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie, Parallel,
Systemidentifikasjon Løsninger
 University College of Southeast Norway Systemidentifikasjon Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 7 3 Validering...
University College of Southeast Norway Systemidentifikasjon Løsninger HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Innledning... 3 2 Minste kvadraters metode... 7 3 Validering...
Mars Robotene (5. 7. trinn)
") Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Frekvensanalyse av likestrømsmotor med diskret regulator og antialiasing filter
 C:\Per\Fag\Styresys\SANNOV\13LØSØV2.wpd Fag SO507E Styresystemer HIST-AFT Feb 2012 PHv Løsning heimeøving 2 Sanntid Revidert sist: 8/2-13 NB! Matlab har vært under endring de siste årene. Mer og mer baserer
C:\Per\Fag\Styresys\SANNOV\13LØSØV2.wpd Fag SO507E Styresystemer HIST-AFT Feb 2012 PHv Løsning heimeøving 2 Sanntid Revidert sist: 8/2-13 NB! Matlab har vært under endring de siste årene. Mer og mer baserer
Eksperimentell innstilling av PID-regulator
 Kapittel 4 Eksperimentell innstilling av PID-regulator 4.1 Innledning Dette kapitlet beskriver noen tradisjonelle metoder for eksperimentell innstilling av regulatorparametre i P-, PI- og PID-regulatorer,
Kapittel 4 Eksperimentell innstilling av PID-regulator 4.1 Innledning Dette kapitlet beskriver noen tradisjonelle metoder for eksperimentell innstilling av regulatorparametre i P-, PI- og PID-regulatorer,
Utledning av Skogestads PID-regler
 Utledning av Skogestads PID-regler + +?!?!! (This version: August 0, 1998) 1 Approksimasjon av dynamikk (Skogestads halveringsregel) Vi ønsker å approksimere høyre ordens dynamikk som dødtid. Merk at rene
Utledning av Skogestads PID-regler + +?!?!! (This version: August 0, 1998) 1 Approksimasjon av dynamikk (Skogestads halveringsregel) Vi ønsker å approksimere høyre ordens dynamikk som dødtid. Merk at rene
Spørretime / Oppsummering
 MAS107 Reguleringsteknikk Spørretime / Oppsummering AUD F 29. mai kl. 10:00 12:00 Generell bakgrunnsmateriale Gjennomgang av eksamen 2006 MAS107 Reguleringsteknikk, 2007: Side 1 G. Hovland Presentasjon
MAS107 Reguleringsteknikk Spørretime / Oppsummering AUD F 29. mai kl. 10:00 12:00 Generell bakgrunnsmateriale Gjennomgang av eksamen 2006 MAS107 Reguleringsteknikk, 2007: Side 1 G. Hovland Presentasjon
Her skal du lære å programmere micro:biten slik at du kan spille stein, saks, papir med den eller mot den.
 PXT: Stein, saks, papir Skrevet av: Bjørn Hamre Kurs: Microbit Introduksjon Her skal du lære å programmere micro:biten slik at du kan spille stein, saks, papir med den eller mot den. Steg 1: Velge tilfeldig
PXT: Stein, saks, papir Skrevet av: Bjørn Hamre Kurs: Microbit Introduksjon Her skal du lære å programmere micro:biten slik at du kan spille stein, saks, papir med den eller mot den. Steg 1: Velge tilfeldig
Brukergrensesnittet i LabVIEW
 Kapittel 2 Brukergrensesnittet i LabVIEW 2.1 Hvordan starte LabVIEW Programmet LabVIEW kan startes på flere måter: Via Start (på PC ens skrivebord) / Programmer / National Instruments /LabVIEW Du kan åpne
Kapittel 2 Brukergrensesnittet i LabVIEW 2.1 Hvordan starte LabVIEW Programmet LabVIEW kan startes på flere måter: Via Start (på PC ens skrivebord) / Programmer / National Instruments /LabVIEW Du kan åpne
Modellbasert regulering: Foroverkopling
 36 Generelt Dette er artikkel nr. 5 i artikkelserien Reguleringsteknikk som publiseres i AMNYTT. Artiklene er/blir som følger: Artikkel 1: Reguleringsteknikkens betydning og grunnprinsipp. (Publisert i
36 Generelt Dette er artikkel nr. 5 i artikkelserien Reguleringsteknikk som publiseres i AMNYTT. Artiklene er/blir som følger: Artikkel 1: Reguleringsteknikkens betydning og grunnprinsipp. (Publisert i
Slik skal du tune dine PID-regulatorer
 Slik skal du tune dine PID-regulatorer Ivar J. Halvorsen SINTEF, Reguleringsteknikk PROST temadag Tirsdag 22. januar 2002 Granfos Konferansesenter, Oslo 1 Innhold Hva er regulering og tuning Enkle regler
Slik skal du tune dine PID-regulatorer Ivar J. Halvorsen SINTEF, Reguleringsteknikk PROST temadag Tirsdag 22. januar 2002 Granfos Konferansesenter, Oslo 1 Innhold Hva er regulering og tuning Enkle regler
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 15.desember 2014 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 15.desember 2014 Varighet/eksamenstid: 0900-1400 Emnekode: Emnenavn: TELE2001-A Reguleringsteknikk Klasse: 2EL 2FE Studiepoeng:
2.2.1 Framgangsmåte for matematisk modellering Modellering av massesystemer. Modellbegreper... 15
 Innhold 1 Innledning 9 2 Matematisk modellering 13 2.1 Innledning... 13 2.2 Utviklingavdynamiskemodeller... 14 2.2.1 Framgangsmåte for matematisk modellering...... 14 2.2.2 Modellering av massesystemer.
Innhold 1 Innledning 9 2 Matematisk modellering 13 2.1 Innledning... 13 2.2 Utviklingavdynamiskemodeller... 14 2.2.1 Framgangsmåte for matematisk modellering...... 14 2.2.2 Modellering av massesystemer.
EKSAMENSOPPGAVE. Høgskolen i Telemark. EMNE: IA3112 Automatiseringsteknikk. EMNEANSVARLIG: Finn Haugen (tlf ). EKSAMENSTID: 5 timer
. EKSAMENSTID: 5 timer") Høgskolen i Telemark Avdeling for teknologiske fag EKSAMENSOPPGAVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Haugen (tlf. 9701915). KLASSE(R): DATO: 18.1.013 EKSAMENSTID: 5 timer Eksamensoppgaven
Høgskolen i Telemark Avdeling for teknologiske fag EKSAMENSOPPGAVE EMNE: IA311 Automatiseringsteknikk. EMNEANSVARLIG: Finn Haugen (tlf. 9701915). KLASSE(R): DATO: 18.1.013 EKSAMENSTID: 5 timer Eksamensoppgaven
PXT: Det regner mat! Introduksjon. Steg 1: Grunnlag. Sjekkliste. Skrevet av: Helene Isnes
 PXT: Det regner mat! Skrevet av: Helene Isnes Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Matematikk, Programmering Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole Introduksjon
PXT: Det regner mat! Skrevet av: Helene Isnes Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Matematikk, Programmering Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole Introduksjon
Zelio Soft grunnkurs. Zelio Logic reléerstatter programmering
 Zelio Soft grunnkurs Zelio Logic reléerstatter programmering Zelio Soft programvare for programmering av Zelio Logic reléerstatter Grunnkurset forutsetter at Zelio Soft er installert på PC Skjermbilder
Zelio Soft grunnkurs Zelio Logic reléerstatter programmering Zelio Soft programvare for programmering av Zelio Logic reléerstatter Grunnkurset forutsetter at Zelio Soft er installert på PC Skjermbilder
Reguleringsstrukturer
 Kapittel 11 Reguleringsstrukturer Dette kapitlet beskriver diverse reguleringsstrukturer for industrielle anvendelser. I strukturene inngår én eller flere PID-reguleringssløyfer. 11.1 Kaskaderegulering
Kapittel 11 Reguleringsstrukturer Dette kapitlet beskriver diverse reguleringsstrukturer for industrielle anvendelser. I strukturene inngår én eller flere PID-reguleringssløyfer. 11.1 Kaskaderegulering
Tilstandsestimering Oppgaver
 University College of Southeast Norway Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
University College of Southeast Norway Tilstandsestimering Oppgaver HANS-PETTER HALVORSEN http://home.hit.no/~hansha Innholdsfortegnelse 1 Grunnlag... 3 1.1 Statistikk og Stokastiske systemer... 3 1.2
Foroverkopling. Kapittel Innledning
 Kapittel 10 Foroverkopling 10.1 Innledning Vi vet fra tidligere kapitler at tilbakekoplet regulering vil kunne bringe prosessutgangen tilstrekkelig nær referansen. I de fleste tilfeller er dette en tilstrekkelig
Kapittel 10 Foroverkopling 10.1 Innledning Vi vet fra tidligere kapitler at tilbakekoplet regulering vil kunne bringe prosessutgangen tilstrekkelig nær referansen. I de fleste tilfeller er dette en tilstrekkelig
SLUTTPRØVE. EMNEANSVARLIG: Finn Aakre Haugen. Tlf Epost: Antall sider: 15 (medregnet denne forsiden)
") Høgskolen i Telemark Avdeling for teknologiske fag SLUTTPRØVE EMNE: EK3114 Automatisering og vannkraftregulering. EMNEANSVARLIG: Finn Aakre Haugen. Tlf. 9701915. Epost: finn.haugen@hit.no. KLASSE(R): DATO:.1.015
Høgskolen i Telemark Avdeling for teknologiske fag SLUTTPRØVE EMNE: EK3114 Automatisering og vannkraftregulering. EMNEANSVARLIG: Finn Aakre Haugen. Tlf. 9701915. Epost: finn.haugen@hit.no. KLASSE(R): DATO:.1.015
Løsningsforslag Dataøving 2
 TTK45 Reguleringsteknikk, Vår 6 Løsningsforslag Dataøving Oppgave a) Modellen er gitt ved: Setter de deriverte lik : ẋ = a x c x x () ẋ = a x + c x x x (a c x ) = () x ( a + c x ) = Det gir oss likevektspunktene
TTK45 Reguleringsteknikk, Vår 6 Løsningsforslag Dataøving Oppgave a) Modellen er gitt ved: Setter de deriverte lik : ẋ = a x c x x () ẋ = a x + c x x x (a c x ) = () x ( a + c x ) = Det gir oss likevektspunktene
Stabilitetsanalyse. Kapittel Innledning
 Kapittel 6 Stabilitetsanalyse 6.1 Innledning I noen sammenhenger er det ønskelig å undersøke om, eller betingelsene for at, et system er stabilt eller ustabilt. Spesielt innen reguleringsteknikken er stabilitetsanalyse
Kapittel 6 Stabilitetsanalyse 6.1 Innledning I noen sammenhenger er det ønskelig å undersøke om, eller betingelsene for at, et system er stabilt eller ustabilt. Spesielt innen reguleringsteknikken er stabilitetsanalyse
Program for elektro- og datateknikk
 Program for elektro- og datateknikk Fag TELE2001 Reguleringsteknikk Tank 4 øving 1. Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-08-25 Målsetting: I denne oppgaven skal du bli kjent med Simuleringsprogrammet
Program for elektro- og datateknikk Fag TELE2001 Reguleringsteknikk Tank 4 øving 1. Utarbeidet: PHv Revidert sist Fredrik Dessen 2015-08-25 Målsetting: I denne oppgaven skal du bli kjent med Simuleringsprogrammet
Systemidentifikasjon
 University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet brukes som forelesningsnotater i modellbasert regulering over temaet systemidentifikasjon.
University College of Southeast Norway HANS-PETTER HALVORSEN http://home.hit.no/~hansha Forord Dette dokumentet brukes som forelesningsnotater i modellbasert regulering over temaet systemidentifikasjon.
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge
 Løsning til eksamen i IA32 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 24. 207. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning til oppgave a (5%).
Løsning til eksamen i IA32 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 24. 207. Varighet 5 timer. Emneansvarlig: Finn Aakre Haugen (finn.haugen@usn.no). Løsning til oppgave a (5%).
Oppgave 1.1. Den første er en klassiker. Studer figur A4.1 i vedlegg 1. Finn overføringsfunksjonen ved hjelp av manuelle, grafiske metoder.
 Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4 Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen representert
Inst. for teknisk kybernetikk TELE2001 Reguleringsteknikk Øving 4 Revidert sist Fredrik Dessen 2017-10-12 Del 1. En klassiker, og en litt mer utfordrende Du skal her finne overføringsfunksjonen representert
Motor - generatoroppgave II
 KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.17 OPPG.NR.: R113 Motor - generatoroppgave II Et reguleringssyste består av en svitsjstyrt (PWM) otor-generatorenhet og en ikrokontroller (MCU) so åler
KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.17 OPPG.NR.: R113 Motor - generatoroppgave II Et reguleringssyste består av en svitsjstyrt (PWM) otor-generatorenhet og en ikrokontroller (MCU) so åler
Stabilitetsanalyse. Hans- Pe/er Halvorsen, M.Sc.
 Stabilitetsanalyse Hans- Pe/er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial@lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden
Stabilitetsanalyse Hans- Pe/er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial@lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner 2.orden
Mindstorm, robot- og reguleringskurs
 Mindstorm, robot- og reguleringskurs Kursets mål: Sett seg inn i reguleringsteknikk og deretter planlegge, bygge og programmere en robot for å løse et gitt problem. 1 Reguleringsteknikken Reguleringsteknikken
Mindstorm, robot- og reguleringskurs Kursets mål: Sett seg inn i reguleringsteknikk og deretter planlegge, bygge og programmere en robot for å løse et gitt problem. 1 Reguleringsteknikken Reguleringsteknikken
PXT: Himmelfall. Introduksjon. Skrevet av: Helene Isnes og Julie Revdahl
 PXT: Himmelfall Skrevet av: Helene Isnes og Julie Revdahl Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Programmering, Matematikk Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole
PXT: Himmelfall Skrevet av: Helene Isnes og Julie Revdahl Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Programmering, Matematikk Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole
NB! Vedlegg 2 skal benyttes i forbindelse med oppgave 3a), og vedlegges besvarelsen.
, og vedlegges besvarelsen.") SLUTTPRØVE EMNE: EE407 Kybernetikk videregående LÆRER Kjell Erik Wolden KLASSE(R): IA, EL DATO: 0..0 PRØVETID, fra - til (kl.): 9.00.00 Oppgavesettet består av følgende: Antall sider (inkl. vedlegg): 0
SLUTTPRØVE EMNE: EE407 Kybernetikk videregående LÆRER Kjell Erik Wolden KLASSE(R): IA, EL DATO: 0..0 PRØVETID, fra - til (kl.): 9.00.00 Oppgavesettet består av følgende: Antall sider (inkl. vedlegg): 0
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 7. januar 2011 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng:
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Målform: Bokmål Eksamensdato: 7. januar 2011 Varighet/eksamenstid: 0900-1300 Emnekode: Emnenavn: Klasse: EDT212T Reguleringsteknikk grunnkurs 2EL Studiepoeng:
Reguleringsteknikken kan ha stor (ofte avgjørende) betydning for blant annet følgende forhold:
 betydning for blant annet følgende forhold:") Kapittel 1 Innledning 1.1 Reguleringsteknikkens betydning Reguleringsteknikk er metoder og teknikker for automatisk styring en fysisk prosess slik at verdien av en gitt prosessvariabel er tilstrekkelig
Kapittel 1 Innledning 1.1 Reguleringsteknikkens betydning Reguleringsteknikk er metoder og teknikker for automatisk styring en fysisk prosess slik at verdien av en gitt prosessvariabel er tilstrekkelig
Simuleringsnotat. Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 6. av Stian Venseth og Kim Joar Øverås
 av Stian Venseth og Kim Joar Øverås Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 6 Sammendrag I dette arbeidsnotatet vil det bli komme frem hvordan vi har jobbet med modellering og simulering
av Stian Venseth og Kim Joar Øverås Prosjekt i emnet «Styresystemer og reguleringsteknikk» Gruppe 6 Sammendrag I dette arbeidsnotatet vil det bli komme frem hvordan vi har jobbet med modellering og simulering
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: EK3114 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Emnenavn: Automatisering og vannkraftregulering Tid fra / til: 4.
BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: EK3114 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Emnenavn: Automatisering og vannkraftregulering Tid fra / til: 4.
6,((OHNWULVNH0RWRUGULIWHU.RUWIDWWHWLQQI ULQJL6LPXOLQN DY5LFKDUG/XQG
 6,((OHNWULVNH0RWRUGULIWHU.RUWIDWWHWLQQI ULQJL6LPXOLQN DY5LFKDUG/XQG 'HWWH QRWDWHW HU PHQW n JL HQ NRUWIDWWHW LQQI ULQJ L 0DWODEV 6LPXOLQN WRROERNV 6LPXOLQN HU HW EORNNEDVHUW SURJUDP IRU G\QDPLVNH V\VWHP
6,((OHNWULVNH0RWRUGULIWHU.RUWIDWWHWLQQI ULQJL6LPXOLQN DY5LFKDUG/XQG 'HWWH QRWDWHW HU PHQW n JL HQ NRUWIDWWHW LQQI ULQJ L 0DWODEV 6LPXOLQN WRROERNV 6LPXOLQN HU HW EORNNEDVHUW SURJUDP IRU G\QDPLVNH V\VWHP
a) The loop transfer function with the process model with a P controller is given by h 0 (s) = h c (s)h p (s) = K p (1 + s)(2 + s) K p
 The loop transfer function with the process model with a P controller is given by h 0 (s) = h c (s)h p (s) = K p (1 + s)(2 + s) K p") Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, November 9, 006 SCE1106 Control Theory Solution Exercise 8 Task 1 a) The loop transfer function with
Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, November 9, 006 SCE1106 Control Theory Solution Exercise 8 Task 1 a) The loop transfer function with
Øving 1 ITD Industriell IT
 Utlevert : uke 37 Innlevert : uke 39 (senest torsdag 29. sept) Avdeling for Informasjonsteknologi Høgskolen i Østfold Øving 1 ITD 30005 Industriell IT Øvingen skal utføres individuelt. Det forutsettes
Utlevert : uke 37 Innlevert : uke 39 (senest torsdag 29. sept) Avdeling for Informasjonsteknologi Høgskolen i Østfold Øving 1 ITD 30005 Industriell IT Øvingen skal utføres individuelt. Det forutsettes
Control Engineering. Stability Analysis. Hans-Petter Halvorsen
 Control Engineering Stability Analysis Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering Stability Analysis Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
ELEKTRONIKK 2 DAK-ØVING 6 Endre i transistormodell, DCsvip, AC-svip, impedans 2004
 ELEKTRONIKK 2 DAK-ØVING 6 Endre i transistormodell, DCsvip, AC-svip, impedans 2004 Vi skal i denne oppgaven forsøke å simulere et enkelt forsterkertrinn med bipolar transistor. Vi har imidlertid ikke modell
ELEKTRONIKK 2 DAK-ØVING 6 Endre i transistormodell, DCsvip, AC-svip, impedans 2004 Vi skal i denne oppgaven forsøke å simulere et enkelt forsterkertrinn med bipolar transistor. Vi har imidlertid ikke modell
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 C:\Per\Fag\Regtek\Eksamen\Eksamen11\LX2011DesEDT212T.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 20.desember 2011 LØSNINGSFORSLAG EDT212T Reguleringsteknikk grunnkurs Dato: 11.11.12
C:\Per\Fag\Regtek\Eksamen\Eksamen11\LX2011DesEDT212T.wpd HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Eksamensdato Fag 20.desember 2011 LØSNINGSFORSLAG EDT212T Reguleringsteknikk grunnkurs Dato: 11.11.12
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge
 Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 30.11 2016. Varighet 5 timer. Vekt i sluttkarakteren: 100%. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no).
Løsning til eksamen i IA3112 Automatiseringsteknikk ved Høgskolen i Sørøst- Norge Eksamensdato: 30.11 2016. Varighet 5 timer. Vekt i sluttkarakteren: 100%. Emneansvarlig: Finn Aakre Haugen (finn.haugen@hit.no).
Del 1. ACC adaptiv cruisekontroll
 Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Ekstra øving 4, løsningsforslag Revidert sist Fredrik Dessen 2017-10-18 Del 1. ACC adaptiv cruisekontroll Cruisekontroll har eksistert lenge.
Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Ekstra øving 4, løsningsforslag Revidert sist Fredrik Dessen 2017-10-18 Del 1. ACC adaptiv cruisekontroll Cruisekontroll har eksistert lenge.
SCE1106 Control Theory
 Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, October 26, 2006 SCE1106 Control Theory Exercise 6 Task 1 a) The poles of the open loop system is
Master study Systems and Control Engineering Department of Technology Telemark University College DDiR, October 26, 2006 SCE1106 Control Theory Exercise 6 Task 1 a) The poles of the open loop system is
PR362009 24. november 2009 Programvare, pc-basert kontroll Side 1 av 5
 Programvare, pc-basert kontroll Side 1 av 5 IT-standarder: TwinCAT-programmeringsmiljø integreres i Microsoft Visual Studio TwinCAT 3 extended Automation Med TwinCAT 3 introduserer Beckhoff sin nye generasjon
Programvare, pc-basert kontroll Side 1 av 5 IT-standarder: TwinCAT-programmeringsmiljø integreres i Microsoft Visual Studio TwinCAT 3 extended Automation Med TwinCAT 3 introduserer Beckhoff sin nye generasjon
Eksperimentell innstilling av PID-regulator
 Kapittel 4 Eksperimentell innstilling av PID-regulator 4.1 Innledning Dette kapitlet beskriver noen tradisjonelle metoder for eksperimentell innstilling av regulatorparametre i P-, PI- og PID-regulatorer,
Kapittel 4 Eksperimentell innstilling av PID-regulator 4.1 Innledning Dette kapitlet beskriver noen tradisjonelle metoder for eksperimentell innstilling av regulatorparametre i P-, PI- og PID-regulatorer,
AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE
 AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgaven består av: ybernetikk I 2E Antall sider (inkl. forsiden): Emnekode: SO 318E Dato: Antall oppgaver: 6 Faglig veileder: Veslemøy
AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgaven består av: ybernetikk I 2E Antall sider (inkl. forsiden): Emnekode: SO 318E Dato: Antall oppgaver: 6 Faglig veileder: Veslemøy
Testrapport Prosjekt nr. 2011-22 Det Norske Veritas
 Prosjekt nr. 2011 22 Testrapport Hovedprosjektets tittel Implementering av plugin og utvikling av wizard for Det Norske Veritas Prosjektdeltakere Magnus Strand Nekstad s156159 Jørgen Rønbeck s135779 Dato
Prosjekt nr. 2011 22 Testrapport Hovedprosjektets tittel Implementering av plugin og utvikling av wizard for Det Norske Veritas Prosjektdeltakere Magnus Strand Nekstad s156159 Jørgen Rønbeck s135779 Dato
EMAR2101 Reguleringssystemer 1: Løsning til øving 3
 Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Løsning til øving 3 Løsning til oppgave 1 Eksempler på anvendelser: Produktkvalitet: Regulering av slipekraft
Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Løsning til øving 3 Løsning til oppgave 1 Eksempler på anvendelser: Produktkvalitet: Regulering av slipekraft
FYS3240/4240 Forslag til prosjektoppgave for Lab 4: DAQ-øvelse med LabVIEW
 FYS3240/4240 Forslag til prosjektoppgave for Lab 4: DAQ-øvelse med LabVIEW Jan Kenneth Bekkeng, 11.3.2013 Hensikten med denne øvelsen er å lære DAQ-programmering med utviklingsverktøyet LabVIEW. NB: se
FYS3240/4240 Forslag til prosjektoppgave for Lab 4: DAQ-øvelse med LabVIEW Jan Kenneth Bekkeng, 11.3.2013 Hensikten med denne øvelsen er å lære DAQ-programmering med utviklingsverktøyet LabVIEW. NB: se
Program for elektro- og datateknikk
 D:\Per\Fag\Regtek\Oppgavebok\2a Tank 4 øvinger\04_tank4_1_2014_v3.wpd Program for elektro- og datateknikk Fag TELE2001 Reguleringsteknikk Tank 4 øving 1. Utarbeidet: PHv Revidert sist: PHv, aug 2014 Målsetting:
D:\Per\Fag\Regtek\Oppgavebok\2a Tank 4 øvinger\04_tank4_1_2014_v3.wpd Program for elektro- og datateknikk Fag TELE2001 Reguleringsteknikk Tank 4 øving 1. Utarbeidet: PHv Revidert sist: PHv, aug 2014 Målsetting:
EKSAMENSFORSIDE Skriftlig eksamen med tilsyn
 BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: EK3114 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 13 Tillatte hjelpemidler: Emnenavn: Automatisering
BOKMÅL EKSAMENSFORSIDE Skriftlig eksamen med tilsyn Emnekode: EK3114 Dato: Porsgrunn Ansv. faglærer: Finn Aakre Haugen Campus: Porsgrunn Antall oppgaver: 13 Tillatte hjelpemidler: Emnenavn: Automatisering
Quo vadis prosessregulering?
 Quo vadis prosessregulering? Morten Hovd PROST industrimøte Granfos, 24. Januar 2001 PROST Industrimøte, Granfos, 24. januar 2001 Hvor står vi? Et subjektivt bilde PROST Industrimøte, Granfos, 24. januar
Quo vadis prosessregulering? Morten Hovd PROST industrimøte Granfos, 24. Januar 2001 PROST Industrimøte, Granfos, 24. januar 2001 Hvor står vi? Et subjektivt bilde PROST Industrimøte, Granfos, 24. januar
Høgskolen i Østfold Avdeling for informasjonsteknologi. Fag ITD 30005 Industriell IT. Laboppgave 2. Del 1. Temperatur-regulering
 Høgskolen i Østfold Avdeling for informasjonsteknologi Fag ITD 30005 Industriell IT Laboppgave 2. Del 1. Temperatur-regulering Frist for innlevering: Tirsdag 20.okt 2015 Remmen 01.10.2015 00 Sept 10 Temperaturregulering
Høgskolen i Østfold Avdeling for informasjonsteknologi Fag ITD 30005 Industriell IT Laboppgave 2. Del 1. Temperatur-regulering Frist for innlevering: Tirsdag 20.okt 2015 Remmen 01.10.2015 00 Sept 10 Temperaturregulering
EKSAMEN. Ta med utregninger i besvarelsen for å vise hvordan du har kommet fram til svaret.
 EKSAMEN Emnekode: ITD30005 Emne: Industriell IT Dato: 16.12.2015 Eksamenstid: kl. 0900 til kl. 1300 Hjelpemidler: Tre A4-ark (seks sider) med egne notater. "ikke-kommuniserende" kalkulator. Faglærer: Robert
EKSAMEN Emnekode: ITD30005 Emne: Industriell IT Dato: 16.12.2015 Eksamenstid: kl. 0900 til kl. 1300 Hjelpemidler: Tre A4-ark (seks sider) med egne notater. "ikke-kommuniserende" kalkulator. Faglærer: Robert
Digitaltesten 2 - en diagnostisk test. Ellen Gard
 Digitaltesten 2 - en diagnostisk test Digitaltesten Et samarbeidsprosjekt mellom Vox og Norsk Test AS Vox tildeler tester og sertifiserer tilbydere Norsk Test drifter testen fra sin server Test Test =
Digitaltesten 2 - en diagnostisk test Digitaltesten Et samarbeidsprosjekt mellom Vox og Norsk Test AS Vox tildeler tester og sertifiserer tilbydere Norsk Test drifter testen fra sin server Test Test =
Til: Aktuelle studenter for Cyberneticas studentprogram Antall sider: 5 Dato: 2015-11-01
 Address: Cybernetica AS Leirfossveien 27 N-7038 Trondheim Norway Phone.: +47 73 82 28 70 Fax: +47 73 82 28 71 STUDENTOPPGAVER 2016 Til: Aktuelle studenter for Cyberneticas studentprogram Antall sider:
Address: Cybernetica AS Leirfossveien 27 N-7038 Trondheim Norway Phone.: +47 73 82 28 70 Fax: +47 73 82 28 71 STUDENTOPPGAVER 2016 Til: Aktuelle studenter for Cyberneticas studentprogram Antall sider:
Løsningsforslag øving 8
 K405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 8 a Vi begynner med å finne M 2 s fra figur 2 i oppgaveteksten. M 2 s ω r 2 ω h m sh a sh R2 sr 2 ω K v ω 2 h m sh a sh R2 sr 2 h m sh a sh
K405 Reguleringsteknikk, Vår 206 Oppgave Løsningsforslag øving 8 a Vi begynner med å finne M 2 s fra figur 2 i oppgaveteksten. M 2 s ω r 2 ω h m sh a sh R2 sr 2 ω K v ω 2 h m sh a sh R2 sr 2 h m sh a sh
Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes It s learning. systemidentifikasjon fra sprangrespons.
 Stavanger, 29. september 2016 Det teknisknaturvitenskapelige fakultet ELE620 Systemidentifikasjon, 2016. Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes It s learning.
Stavanger, 29. september 2016 Det teknisknaturvitenskapelige fakultet ELE620 Systemidentifikasjon, 2016. Generell informasjon om faget er tilgjengelig fra fagets nettside, og for øvinger brukes It s learning.
Kan micro:biten vår brukes som en terning? Ja, det er faktisk ganske enkelt!
 Microbit PXT: Terning Skrevet av: Geir Arne Hjelle Kurs: Microbit Språk: Norsk bokmål Introduksjon Kan micro:biten vår brukes som en terning? Ja, det er faktisk ganske enkelt! Steg 1: Vi rister løs Vi
Microbit PXT: Terning Skrevet av: Geir Arne Hjelle Kurs: Microbit Språk: Norsk bokmål Introduksjon Kan micro:biten vår brukes som en terning? Ja, det er faktisk ganske enkelt! Steg 1: Vi rister løs Vi
Matematisk visualisering
 02/01/17 1/5 Matematisk visualisering Matematisk visualisering GLU 1.-7. trinn: Matematisk visualisering og konstruksjon - GeoGebra Innføring i GeoGebra (2 uv-timer) Denne delen er direkte knyttet til
02/01/17 1/5 Matematisk visualisering Matematisk visualisering GLU 1.-7. trinn: Matematisk visualisering og konstruksjon - GeoGebra Innføring i GeoGebra (2 uv-timer) Denne delen er direkte knyttet til
HØGSKOLEN I SØR-TRØNDELAG
 Eksamensdato Fag Dato: 11.12.14 \\hjem.hist.no\pgis\mine dokumenter\backup\fag\reguleringsteknikk\2014\eksamen\lx2014des_korrigert.wpd HØGSKOLEN I SØR-TRØNDELAG AVD. FOR INGENIØR OG NÆRINGSMIDDELFAG INSTITUTT
Eksamensdato Fag Dato: 11.12.14 \\hjem.hist.no\pgis\mine dokumenter\backup\fag\reguleringsteknikk\2014\eksamen\lx2014des_korrigert.wpd HØGSKOLEN I SØR-TRØNDELAG AVD. FOR INGENIØR OG NÆRINGSMIDDELFAG INSTITUTT
DET TEKNISK-NATURVITENSKAPELIGE FAKULTET MASTEROPPGAVE. Forfatter: Ben Ove Landa (signatur forfatter)
") DET TEKNISK-NATURVITENSKAPELIGE FAKULTET MASTEROPPGAVE Studieprogram/spesialisering: Master i Teknologi Kybernetikk/Signalbehandling Vårsemesteret, 2010 Åpen / Konfidensiell Forfatter: Ben Ove Landa (signatur
DET TEKNISK-NATURVITENSKAPELIGE FAKULTET MASTEROPPGAVE Studieprogram/spesialisering: Master i Teknologi Kybernetikk/Signalbehandling Vårsemesteret, 2010 Åpen / Konfidensiell Forfatter: Ben Ove Landa (signatur
Del 1. Totank minimum forstyrrelse
 Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Ekstra øving 6 Revidert sist Fredrik Dessen 2017-11-08 Del 1. Totank minimum forstyrrelse Denne første delen tar for seg nøyaktig samme prosess
Inst. for teknisk kybernetikk Fag TELE2001 Reguleringsteknikk Ekstra øving 6 Revidert sist Fredrik Dessen 2017-11-08 Del 1. Totank minimum forstyrrelse Denne første delen tar for seg nøyaktig samme prosess