Referanseside. TITTEL RAPPORTNR DATO Forprosjekt OR2-302 Ingeniørfaglig systememne PROSJEKTTITTEL
|
|
|
- Linn Martinsen
- 8 år siden
- Visninger:
Transkript
1
2 Referanseside TITTEL RAPPORTNR DATO Forprosjekt OR2-302 Ingeniørfaglig systememne PROSJEKTTITTEL TILGJENGELIG TALL SIDER Robot som CNC-fres Åpen 35 pluss 10 FORFATTERE Christian Marås Andrii Petrychak Lars Martin Gjeraker Morten Sundsøy Svanhild Nævdal Thomsen OPPDRAGSGIVER Marcontrol for Brødrene Aa AS ANSVARLIGE RETTLEIARAR vedlegg RETTLEIARAR/syt RETLEIARARsvarlege er Joar Sande- Fagansvarlig STYRINGSGRUPPE RETTLEIARAR SAMMENDRAG Vi fikk i oppdrag fra Brødrene Aa å utarbeide dokumentasjon om KUKA-robot generelt, samt sikkerhet rundt robot slik at de lett kan implementere KUKA-roboten som CNC-fres i produksjonen. For å simulere hvordan arbeidsoppgaven til KUKAroboten er benyttet vi Universal robot 5 som vi har tilgjengelig på Høgskolen. Det er i faget Ingeniørfaglig system emne i 5. semester at vi har et forprosjekt for å lære hvordan et prosjekt skal styres og gjennomføres. Målet med dette er at vi får mer kunnskap om prosjektstyring fram mot bacheloroppgaven. Resultatet vi kom fram til var 2 grafiske løsninger hvor vi viser hvordan Brødrene Aa kan implementere KUKA-roboten i produksjon. Det er også lagd dokumentasjon på hva sikkerhetstiltak som må til og et delvis prisoverslag på hva det vil koste. Fra prosjektet fikk vi både positive og negative erfaringer vi lærte av og som vi tar med videre til bacheloroppgaven. SUMMARY Brødrene Aa gave us a task to obtain information and documentation about robot and robot safety. This was to simplify the implementation of their KUKA robot in the production as a CNC-mill. We choose to simulate this with the UR-5 robot that we have available at our University College. This project forms part of the subject Engineering Academic System topic, autumn 2014 at Sogn og Fjordane University College. This is therefore a pilot project to the bachelor thesis, the aim of this is to get more knowledge about project management. Our results were two graphic solutions of how to implementing the KUKA robot in their production. When we created the models, we found out how important the security around robot and robot cells are. We have also experience both positive and negative sides of working in a project, which we have learn from and will take with us to the bachelor thesis. EMNEORD OR2-302, CNC, Robot, Fres, Sikkerhet, Automasjon, Prosjekt, Elektro Page 1 of 35

3 Forord Ved Høgskolen i Sogn og Fjordane har vi faget Ingeniørfaglig systememne i femte semester hvor vi skal gjennomføre et forprosjekt og skrive en rapport. Rammene for prosjektet er at gruppene skal bestå av to til fem studenter og det er en forventet tidsramme på 225 timer per student. Studentene står fritt til å definere oppgaven selv, men blir oppfordret til å finne en ekstern oppdragsgiver og ha oppgave med. I tillegg skal gruppene lage en plakat og skrive en pressemelding til presentasjonen. Disse ligger som vedlegg 1 og 11. Den ble prosjektet framført og hver gruppe la frem hva de hadde fått gjort i prosjektet. Oppdragsgiveren til dette prosjektet var Brødrene Aa som hadde et ønske om å sette i drift en KUKA-robot som en CNC-fres ved verftet sitt i Hyen. Gruppen fikk i oppdrag å finne all nødvendig dokumentasjon slik at de lett kan implementere KUKA-roboten i sin produksjon. En ekstra takk går til: - Joar Sande (Veiledning) - Erik Kyrkjebø (Veiledning) - Csaba Mucsi (Teknisk) - Eli Nummedal (Korrektur) - KUKA-Norge/Sverige (Support) - Brødrene Aa for prosjektoppgave Page 2 of 35

4 Prosjektgruppa Christian Marås Andrii Petrychak Lars Martin Gjeraker Morten Sundsøy Svanhild Nævdal Thomsen Prosjektleder Bedriftskontakt & programmerer Head of design Rapportsjef & kaffikoker Head of research Styringsgruppen Joar Sande Prosjektansvarlig Anstein Aa Brødrene Aa AS Christian Marås Lars Martin Gjeraker Morten Sundsøy Svanhild Thomsen Andrii Petrychak Page 3 of 35

5 SAMMENDRAG Vi er en gruppe på fem studenter som tar bachelor i automatiseringsteknikk ved Høgskulen i Sogn og Fjordane. I 5. semester høsten 2014 har vi i faget Ingeniørfaglig systememne gjennomført et forprosjekt. Det er for å øve oss på prosjektstyring fram til bacheloroppgaven. På vårt prosjekt var oppdragsgiveren Brødrene Aa. Brødrene Aa er verdens ledende på konstruksjon av fastlandsferger og er lokalisert i Eikefjord og Hyen. Oppdragsgiveren vår hadde gjort innkjøp av en KUKA KR125-2 som er en 6-akset robotarm som de ønsket å benytte som en CNC-fres i skipsproduksjonen deres ved verftet i Hyen. De er avhengig av spesial deler til båtproduksjonen og ved å ha en CNC-fres i produksjonen kan de spare både tid og penger. Oppgaven vår var å innhente informasjon og lage dokumentasjon på det som er nødvendig rundt KUKA-robot, samt robotsikkerhet slik at de lett kan implementere den i produksjonen. Ideen som oppdragsgiver hadde for roboten var at den skulle jobbe som en 7-akse CNC fres, der den 7-aksen var en skinne den kunne kjøre på. Skinnen var der fordi de ville at den skulle jobbe på større og lengre arbeidsstykker, henholdsvis av materialer som tre, PVC og Divicynell. De så for seg at den skulle stå langs en vegg der roboten skulle jobbe med en maks radius på 180. Ut i fra dette utarbeidet vi to grafiske forslag til hvordan de kan implementere KUKA-roboten i produksjonen. Vi lagde også dokumentasjon på hva sikkerhetstiltak som må til for å ha roboten i produksjon, samt et delvis prisoverslag på hva det vil koste Brødrene Aa. For å simulere arbeidsoppgaven til KUKA-roboten har vi brukt Universal robot 5 som er tilgjengelig på Høgskolen. Vi programmerte den til å skjære ut former i pepperkakedeig. De grafiske forslagene har vi laget i 3D-modeleringsverktøyet Sketchup som er eid av Google. Sketchup har et bibliotek fullt av ferdige 3D-objekter som for eksempel roboter, sikkerhetsbur og annet utstyr som vi kan hente inn i tegningene våre. Først lagde vi forslag 1 hvor vi lagde en løsning ut fra alle kriteriene som Brødrene Aa hadde. Deretter lagde vi forslag 2 hvor vi lagde en løsning på hvordan vi mener det vil fungere best, på grunnlag av informasjon vi har innhentet i dette prosjektet. Vi fant informasjon om priser og kompatibilitet på hardware og software på nettet og fra samtaler med de aktuelle bedriftene. En av tingene vi fant ut i prosjektet var hvor viktig Page 4 of 35

6 sikkerhet rundt robot og robotceller var. Informasjonen rundt robotsikkerhet hentet vi i hovedsak fra Norsk ISO Standard for «Roboter i industrielt miljø». Et av målene med prosjektet var å lære om hvordan det er å styre et prosjekt og jobbe i gruppe samt kartlegge mulige fallgruver som vi kan unngå til bacheloroppgaven. Vi klarte ikke å kartlegge alle fallgruvene ved begynnelsen av dette prosjektet, men vi føler at vi har et bedre grunnlag for bacheloroppgaven. Etter å ha fullført dette prosjektet har vi lært hvor viktig det er med god kommunikasjon med oppdragsgiver. Vi har også lært at det er bedre å begrense oppgaven og heller utvide ved behov. Page 5 of 35

7 Innholdsliste Referanseside. 1 Forord Sammendrag Innledning Strukturering i startfasen Videre arbeid med prosjektet Etter den ny definerte oppgaven Sikkerhetskrav for roboter for Industrielt miljø Generelt om HMS og Norsk ISO Standard Del1 Roboter Del2 Robotsystemer og Integrering Implmentering av robot Forslag Forslag software til KUKA robot Valg av utstyr Litt om KUKA Valg av utstyr Prisoverslag for utstyr til robot Universal Robot Funskjon Gjennomføring Bruker veiledning Problemer Rammer og tid Rammer Timebruk Oppsummering Konklusjon Kildeliste Vedleggsliste...36 Page 6 of 35


8 Kapittel 1 Innledning 1.1 Strukturering i startfasen Det første vi gjorde var å utnevne Christian som prosjektleder. Deretter satt vi oss ned og diskuterte hvordan strukturen i gruppen skal være med tanke på møter, timelister og andre arbeidsmetoder. Vi benyttet facebook som en kommunikasjonsplattform hvor vi diskuterte og skrev innkalling til møter. I tillegg til dette prøvde vi å finne et gratis nettbasert prosjektstyringsprogram. Vi fant to programmer som passet våres kriterier det var Zoho-projects [1] og Freedcamp [2]. Begge sidene hadde gode funksjoner, men alle de gode og mest praktiske som kalender, planlegger og lagringsplass var betalingstjenester. Dette var noe som vi så gikk igjen hos andre nettsider og derfor gikk vi helt vekk i fra tanken på å bruke et nettbasert prosjektstyringsprogram. Det neste vi så etter var et gratis nettbasert kalenderprogram, slik at gruppen kan ha en felles kalender. Vi fant fort en bra kalender side Teamup [4], som var lett å bruke og alle kunne redigere innholdet. Vi lagde en kalender som ble kalt KUKAProject. Nedenfor vises et bilde av hvordan programmet ser ut. Figur 1: Et utsnitt av vår nettbaserte kalender fra oktober måned. Page 7 of 35


9 1.2 Videre arbeid med prosjektet 18. september 2014 hadde vi et møte med Brødrene Aa. Etter møte hadde vi et gruppemøte der vi skrev prosjektbeskrivelse og de forskjellige oppgaver som måtte utføres. I dette delkapittelet skal vi forklare hva vi gjorde fram til Vi laget følgende mål, gruppestruktur og gjennomføringsplan Hovedmål: Innhente kunnskap og dokumentasjon for å igangsette KUKA-robot til produksjon hos Marcontrol for Brødrene Aa. Delmål: - Utredning av flytskjema og HMS dokumentasjon. - Kartlegge software. - PLS-styring og klargjøring av KUKA-robot. - Testing av PLS-styring på Universal Robot 5(UR-5). Figur 2: Gruppestruktur. Arbeidsfordeling: Svanhild: Flytskjema Page 8 of 35

10 Christian: Prosjektleder, HMS og Maskindirektivet Andrii: PLS-styring, UR5-robot og kontaktperson for Marcontrol og Brødre Aa Morten: PLS-styring og UR5-robot Lars Martin: KUKA-robot(defekte/mangler), Maskindirektivet Framdriftsplan Vi skulle legger opp ny framdriftsplan for 2 uker omgangen, altså på annethvert møte. Møte tid hver onsdag kl dersom ingenting annet ble sagt. Arbeid fram til Vi skulle bruke dette høstprosjektet til å planlegge videre jobb med KUKA-roboten på bacheloren til våren. Der oppgaven var å lage joystick styring til roboten som skulle brukes til å pusse båtskrog hos Brødrene Aa. Vi startet med å skaffe informasjon og dokumentasjon på roboten, samt opplæring og testing av høgskolens UR5-robot. Ved å bruke UR-5 kunne vi simulere pusseprinsippet ved å vaske av kritt fra tavlen. Siden vi ikke hadde nok kunnskap om kommunikasjon mellom datamaskin og UR-5, fikk vi opplæring av Csaba Mucsi. I starten av november hadde vi et møte med Erik Kyrkjebø, som er viserektor for FoU ved Høgskolen. Møte var for å få gode innspill og råd om prosjektet vårt, ettersom han har mye erfaring innenfor roboter og robotsystemer. Etter møtet med Kyrkjebø, hadde vi et gruppemøte der vi prøvde å begrense oppgaven vår og definere den på nytt. Det første vi fastslo var at det ikke var optimalt å bruke roboten som en pusserobot. I tillegg fant vi ut at sensorer som kamera, lasere, og trykkmåling var nødvendig for å få optimal pussing. Noe som medførte at prosjektet ble mye mer komplisert og mindre sannsynlig at vi fikk ferdigstilt til våren På grunnlag av dette fant vi ut at oppgaven vår var for uklar og bred. Derfor måtte vi ta kontakt med Brødrene Aa for å få en mer spesifikk oppgave. Brødrene Aa kunne meddele at de allerede hadde kjøpt en halvautomatisk pussemaskin og så heller for seg roboten som en CNC-fres på skinner. Vi var klar over at det var en av ideene Brødrene Aa hadde for roboten, men på grunn av dårlig kommunikasjon har vi jobbet mot en oppgave som de egentlig hadde en løsning på allerede. Page 9 of 35

11 Ettersom vi hadde valgt å jobbe mot en pussemaskin måtte vi omstille oss og definere hovedmål og delmål på nytt. Neste delkapittel omhandler arbeidet vårt etter den nye definerte oppgaven. 1.3 Den nye definerte oppgaven Etter den ny definerte oppgaven satte vi oss nye mål og arbeidsfordeling som lyder: Hovedmål: Tilrettelegge for Brødrene Aa med dokumentasjon, slik at de kan implementere KUKAroboten som CNC-fres i produksjonen sin. Delmål: - Finne ut hva programvarer og hardware som må til for å bruke KUKA-roboten som CNC-fres - Utrede ulike sikkerhetsaspekt med å ha en industriell robot i produksjonen. - Lage grafisk 3D-modell av KUKA robot i produksjonen. - Lage en presentabel prototype med skolen sin UR5-robot til presentasjon Arbeidsfordeling: Morten: Rapport struktur, presentasjonsansvarlig Lars: Pressmelding, plakat, hva sier maskindirektivet om industrielle roboter, konsept modell Andrii: Skrive om UR5, få UR5-en presentabel til Svanhild: Om KUKA robot, implementering av robot i produksjonen til Brødrene Aa. Christian: Sikkerhet, prosjektstyring, hvordan har vi har jobbet. Etter at vi hadde satt oss nye mål og oppgaver begynte vi først og fremst å jobbe mot presentasjonen Det vil si at vi fokuserte mest på de tingene som måtte være klar til presentasjonen som: presentabel robot og grafisk 3D-modell. Det siste punktet medfølgte research om regler, utstyr og priser på robot sikkerhet. Mer om dette kan du lese om i kapittel 4 og 5. Hva vi gjorde med roboten og hvordan den fungerer kan du lese om i kapittel 6. Page 10 of 35

12 Kapittel 2 Sikkerhetskrav for roboter for Industrielt miljø 2.1 Generelt om HMS og Norsk ISO Standard HMS (Helse, miljø og sikkerhet) er noe en bedrift referer til når det er snakk om arbeidsforhold, skader, helserisiko, miljøskade mm. Definisjonen til arbeidstilsynet på HMS eller internkontroll er: Produksjon, produkter og tjenester skal oppfylle forskjellige sikkerhets og kvalitetsbetingelser. Krav til lokaler, verneinnretninger og tilrettelegging av arbeid [3]. Videre sier de at hver bedrift er pålagt å følge HMS tiltak for å hindre og forebygge arbeidsulykker. Hvis vi ser på HMS i dette prosjektet så er det et tema som skiller seg ut: sikkerhet. Sikkerhet er kanskje det som er mest sentralt her siden det fort kan skade mennesker, dyr og materialer. Helse og miljø er selvfølgelig viktig faktorer som vi må ta høyde for, men det er mer snakk om hvordan avfallet fra fresen blir håndtert og hvordan arbeidsforholdene er rundt roboten er. Det første vi skal ta for oss er hva som står i Norsk Standard NS-EN ISO og 2:2011. Deretter skal vi se hva sikkerhetstiltak som det er krav til når det gjelder industrielle roboter, men først noen sentrale begreper i standarden. Hazard Motion: Motion that is likely to cause personal physical injury or damage to health [4] Industrial Robot: automatically controlled, reprogrammable multipurpose manipulator, programmable in three or more axes, which can be either fixed in place or mobile for use in industrial automation. [4] Industrial robot cells: one or more robot systems including associated machinery and equipment and the associated safeguarded space and protective measures [5] Del 1 av standarden omhandler «Roboter» og retningslinjer for hva sikkerhetskrav det er til design og informasjon, som bruksanvisning, merking osv. I tillegg til dette beskriver den de grunnleggende risikoene assosiert med industrielle roboter, og sier hva krav som stilles for å fjerne eller redusere risikoen. Del 2 omhandler «Robotsystemer og integrering». Denne delen forteller hva sikkerhetskrav som stilles for integrering av industrielle roboter og industrielle robot celler. På figur 3 vises relasjonene mellom de ulike standardene og andre standarder som maskindirektivet. I neste delkapittel skal vi ta for oss det viktigeste fra hver del å se opp mot KUKA- roboten. Page 11 of 35

13 Figur 3: Relasjoner mellom de ulike standardene. 2.2 Del 1: Roboter I Del 1, kapittel 4 står det oppsummert hvordan du utfører risikovurdering ut i fra Annex A (Informative). Annex A lister opp de mest signifikante risikoene som kan forekomme hos en robot. Oppsummert må en se på: a) The intended operations of the robot, including teaching, maintenance, setting and cleaning. b) Unexpected star-up c) Access by personnel from all directions d) Reasonably foreseeable misuse of the robot e) The effect of failure in the control system f) Where necessary, the hazards associated with the specific robot application [4] Videre skal vi prøve å se på punktene a) til f) og se på hva som er viktig å tenke på for de som skal håndtere KUKA-roboten hos Brødrene Aa. For Brødrene Aa er det viktig at alle vet hva hensikten med roboten er og at det er definert hva den skal gjøre. Når dette er på plass kan de starte med den nødvendige opplæringen med roboten. Noe som innebærer både sikkerhetsrutiner og den funksjonelle opplæringen av roboten. Page 12 of 35
 Unexpected star-up c) Access by personnel from all directions d) Reasonably foreseeable misuse of the robot e) The effect of failure in the control system f) Where necessary, the hazards")
14 Feilbruk av roboten kan spesielt komme når vi programmerer roboten fra datamaskin. Konsekvensene av feil i kontrollsystemet kan være til skade for utstyr og mennesker, pga. sammenstøt, surring av ledninger og friksjon. Hos Brødrene Aa vil kontrollsystemet være en blanding av software og hardware. Hardware er datamaskin, det medfølgende kontrollpanelet til roboten og styreskapet til roboten. Softwaren blir i form av RhinoCero med RhinoCAM (plugin til RhinoCero) og IRBCAM-for å mate til roboten. 2.3 Del2: Robotsystemer og Integrering Denne delen forteller om hva sikkerhetskrav det er når du skal implementere robot og robotceller i en produksjon. I dette delkapittelet skal vi ta for oss hva sikkerhetskrav det stilles hvis du skal ha en industriell robot som KUKA KR125-2 i produksjonen. Vi vil videre fokusere på et utvalg av kapittel 5, «safety and protective measures» og ta for oss de punktetene vi så på som mest signifikante og informativ Kontrollpanelet og annet utstyr skal være utenfor sikkerhetsgjerde og slik at det er full oversikt over roboten sitt avgrensede området Robotcellen og roboten skal ha nødstopp og beskyttelse stopp for eksterne beskyttelses enheter sier hva krav det er til redskap som festes til slutten av robotarmen, noe som blir aktuelt ettersom Brødrene Aa skal feste en fres til roboten. Her er punktene som står i dette delkapittelet: End-effector (end of arm tooling) requirements a) Loss or change of energy supply (e.g. electrical, hydraulic, pneumatic, vacuum supply) does not cause release of the load that would result in a hazardous condition. b) The static and dynamic forces created by the load and the end-effectors together are within the load capacity and dynamic response of the robot. c) Wrist plates(mounting flange) and accessories properly align(couple) d) Detachable tools are securely attached while in use e) Release of detachable tools only occurs in designated locations or under specific, controlled conditions, if the release could result in hazardous situation f) The end-effector withstands the anticipated force for its expected life. [5] Page 13 of 35



15 omhandler krav til begrensing av bevegelse. Dette delkapittelet sier blant annet noe om de ulike kravene som stilles til mekanisk og ikke mekanisk bevegelsesbegrensning. Dette vil si begrensning med «software» eller «hardware» forteller om krav til robot når den kjører automatiske operasjoner. Dette er et aktuelt punkt ettersom Brødrene Aa har tenkt at roboten skal utføre arbeidet automatisk etter gitt CNC tegning. Videre i delkapittelet er det og presisert at nødstopp har den høyeste funksjon som vil si at ingenting kan overstyre den. Alle automatiske operasjoner skal settes i gang utenfor sikkerhetssone forteller om krav til robot når den kjører manuelle operasjoner. Blant annet står det at roboten da må bli styrt av et godkjent lokalt kontrollpanel, som det medfølgende kontrollpanelet og styringsskap til KUKA Roboten. Figur 4: KUKA kontrollpanel og styringsskap [6] Safeguarding er det største delkapittelet og omhandler regler for sikring av robot og robotceller. I tillegg referer dette delkapittelet til mange andre enkeltstandere, Et eksempel på dette er «Guards and protective devices shall meet the requirements of ISO 12100». Page 14 of 35

16 forteller hva krav det stilles når mennesker og maskin er i innenfor samme arbeidsområde og skal arbeide i lag. Et eksempel på dette er når en skal feste på utstyr, eller bruke «Læreknappen». Generelt står det at dette kan kun være tilfelle hvis oppgaven er predefinert, og at alt av sikkerhets utstyr både soft- og hardware skal være aktivt. Figur 5: Bilde av merkingsforslag fra kapittel NO ISO Del 1 [5] Page 15 of 35

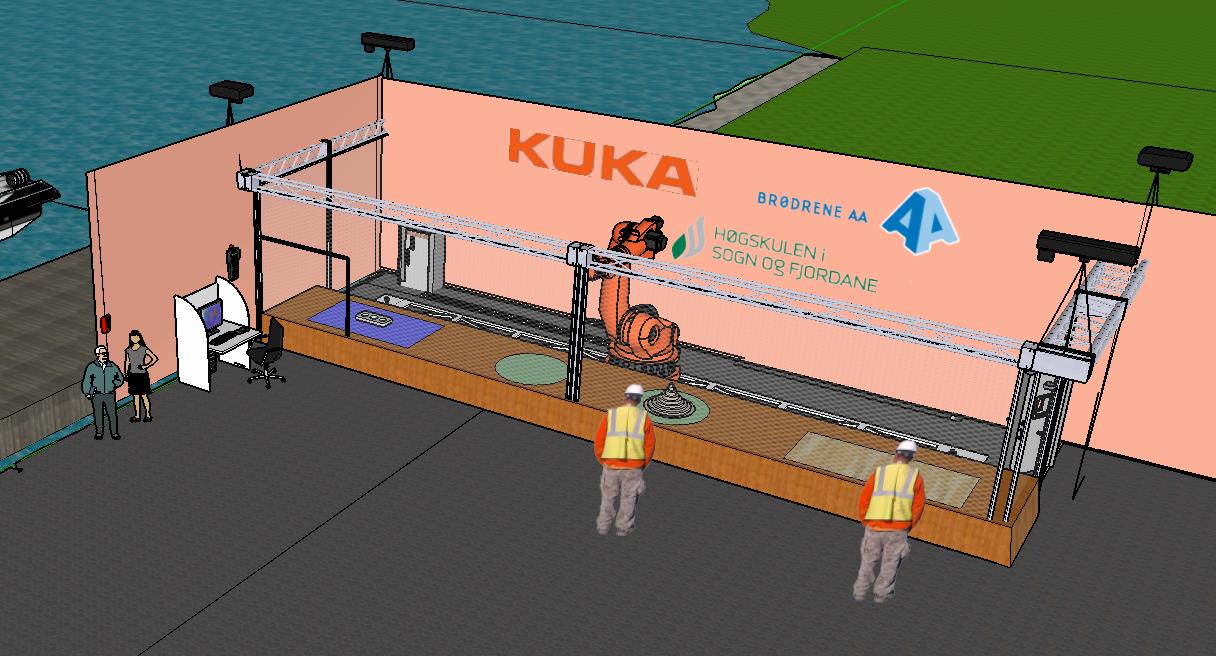
17 Kapittel 3 Implementering av robot I starten søkte vi mye på nettet etter bilder og videoer for og finne en løsning på hvordan roboten skulle benyttes i produksjonen. Det gjorde vi for å danne oss et bilde om hvordan det ser ut rundt en robot i produksjon og hvordan en robot beveger seg i forhold til CNC-fresing. Etter å ha dannet oss et bilde kom vi fram til to forskjellige forslag til hvordan vi tenker Brødrene Aa kan benytte roboten i båtproduksjonen. For å komme frem til de to løsningene vi fremlegger i dette prosjektet har vi brukt 3Dmodeleringsverktøyet Sketchup. Sketchup er et program eid av Google og er mye brukt av både amatører og profesjonelle. Programmet lar deg enkelt utforme tanker og idéer som du har lyst å vise andre. Det har et bibliotek fullt av ferdige 3D-objekter som for eksempel roboter, sikkerhetsbur og annet utstyr som vi kan hente inn i tegningene våre. Felles for begge forslagene er sikkerheten rundt roboten som nevnt tidligere. Gjerdet som er vist på tegningene er der for å hindre at personer og dyr kommer til skade under arbeidsoperasjonene til roboten, da denne kan operere med stor fart og har et voldsomt trykk om den treffer noe den ikke skal treffe. 3.1 Forslag 1. Figur 6: Forslag 1 i forskjellige vinkler. Page 16 of 35

18 Ved utforming av Forslag 1. ble alle ønskene til Brødrene Aa tatt med. Dette innebærer bl.a. lang arbeidsbenk for roboten, 2D og 3D utskjæringer og skinne for roboten til å vandre mellom arbeidsbenkene. Skinnen vi har innhentet informasjon og pris på, er produsert av KUKA og passer nesten alle robotene deres. Om vi ser på arbeidsbordet som er vist på figur 1, ser vi to rektangler på hver side av bordet. Dette er ment som arbeidsbenker for 2D utskjæringer i små og store plater. Illustrasjon på hva dette kan være kan du se i vedlegg 5. De to sirklene som er vist ved senter av bordet, er ment som 3D-modeleringsstasjoner. Siden roboten ikke har mulighet til å komme seg på baksiden for utskjæringer, er det her nødvendig at disse bordene må ha mulighet til å rotere. Bordene må kommunisere med resten av systemet og vil da fungere som en ekstra akse for roboten, se vedlegg 5. Undervegs i utformingen av dette forslaget har vi hatt kontakt med leverandør av KUKAroboter i Norge. Det de kunne meddele var at KUKA-roboten som Brødrene Aa har, ikke lengre er støttet med reservedeler og dermed ville de ikke anbefale å montere den på skinner. I tillegg fikk vi vite at roboten ikke er kompatibel med løsningen som KUKA har for CNC hvor fresing og skinner er samkjørt i programmet. Se vedlegg 5. Page 17 of 35

19 3.2 Forslag 2. Figur 7: Forslag 2 Etter at vi hadde fått innhentet informasjon fra KUKA-Norge om hva som er mulig å benytte roboten til, begynte vi å utarbeide en ny grafisk løsning. Største forskjellen er at denne løsningen har en fast montert robot. Som det vises fra figur 2 er både skinnen og langbord fjernet. Muligheten for at roboten kan jobbe på flere arbeidsbenker ville vi beholde. I dette forslaget er det satt opp to arbeidsbord for 2D fresing og et for 3D-modelering. En stor fordel med dette forslaget er bruksareal. Her vil det ikke være bruk for så mye plass som forslag 1. Tenkt arbeidsbeskrivelse: Arbeider tegner modell som skal utskjæret i eventuelt Rhino Ceros Velger material som skal utskjæras Legger material på arbeidsbenk, rundt bord for 3D og rektangulært bord for 2D Stenger alle dører inn til robot Laster opp tegning fra arbeidsstasjon til roboten Starter arbeidsoperasjon Page 18 of 35


20 3.3 Software til KUKA robot Figur 9: Forslag 2 1. Først tegner du banen til roboten i CAD- programmet som i vårt tilfelle er Rhinoceros Rhino5. Dette funger på samme måte som AutoCAD, der du kan lage en 3D-modell av det du skal frese ut. 2. Når tegningen er ferdig, bruker en plugin-programmet RhinoCAM for å generere enten G-kode eller APT-CL- kode. Disse kodene omgjør tegningen til språk som roboten kan lese. 3. G- koden eller APT-CL- koden blir sendt til datamaskinen med IRBCAM softwaren. Denne datamaskinen er tilkoblet til robotens styrings boks. 4. IRBCAM prosesserer output fra RhinoCAM og sender til roboten, slik at den kan utføre de riktige bevegelsene. Page 19 of 35


21 Kapittel 4 Valg av utstyr 4.1 Litt om KUKA robotics KUKA er verdensledende på roboter, automatiserte løsninger og produksjonssystemer. De har hovedkontor i Tyskland og det er der produksjonen er størst og største konkurrent er ABB. Kundene til KUKA er hovedsakelig fra bilindustrien, men det er også økende innen andre industrier. For å øke nedslaget vil KUKA fokusere på å nå ut i flere bransjer ved å utvikle innovative automatiserte løsninger som kan bidra til at kunden får et produkt med høyere kvalitet og at kostnadene ved produksjon går ned. Figur 10: Viser hvordan sikkerheten rundt KUKA-robot henger sammen. 4.2 Valg av utstyr Sikkerhetsgjerde: Det settes krav til at KUKA robot skal være inngjerdet og sikret mot uønsket start til enhver tid. Derfor er det sikkerhetsgjerde som må på plass først før roboten kan operere. For å ha et optimalt sikkerhetsgjerde må det være robust slik at det ikke er lett å rive ned med tanke på personer i nærheten. Det stilles og krav til høyden på gjerdet da personer ikke skal kunne falle over. Page 20 of 35
22 Vi konkluderte oss fram til at et Nylofor 2D super-gjerde fra Solheim Gjerdenett har alle kvalifikasjonene til å inngjerde Brødrene Aa sin KUKA robot. Egenskaper som robust mot kutting, klatring og innbrudd samt høyder opptil 2,6 meter var det vi trengte for å konkludere med at dette var et sikringsgjerde for vårt prosjekt. Andre egenskaper for sikringsgjerdet er at det er vedlikeholdsfritt og det er med å hindre uønskede kostnader i framtiden. Nødstopp En nødstoppbryter har som funksjon å sette en stopper for truende situasjoner eller begrense konsekvensene ved en farlig situasjon som allerede har oppstått. Dette er med å forhindre skade på mennesker, dyr og utstyr. Nødstoppbrytere skal plasseres strategisk slik at de vil være lett tilgjengelig dersom en farlig situasjon inntreffer. Det settes krav til at utformingen av en nødstoppbryter skal være lett å betjene og lett gjenkjennelig. Det er alltid rød farge på bryterne og gul eller gulrød bakgrunn. Når nødstoppbryteren er trykt skal den holde seg aktivert og opprettholde stoppfunksjonen til den blir frigjort med hensikt. Det er krav til at nødstoppen ikke skal kunne bli sperret uten at det utløser stoppfunksjonen. Ved frigjøring av nødstoppbryteren skal det ikke føre til at roboten begynner å gå igjen, men gjøre det mulig å starte opp roboten på nytt. Sikkerhet på dør Det må være tilstrekkelig sikkerhet rundt dørene for å hindre at uvedkommende kan komme inn til roboten. På markedet er det veldig mange forskjellige løsninger, men i vårt prosjekt har vi bestemt oss for å gå for en løsning som vi mener har god sikkerhet og er rimelig. På begge dørene vil det være en mekanisk bryter som detekter om døren er lukket eller åpen. Det vil være kontakt mellom bryterne og roboten slik at det ikke er mulig å starte opp roboten når døren er åpen. Grunnen til at vi ikke har tatt med noen sensorer som detekterer mennesker inne på området er fordi roboten bare skal kunne igangsettes fra utsiden av gjerdet. Det vil da være sikkerhetsrutiner for personell hvor de blant annet må sjekke til at det ikke er mennesker inne på området til roboten. For å åpne dørene må roboten gå til en satt sikkerhetsposisjon og stoppe. Det vil bare være mulig å åpne dørene fra innsiden av gjerdet når roboten er i arbeid dersom det oppstår en situasjon hvor det er en person innenfor når roboten starter. Page 21 of 35
23 4.3 Prisoverslag for utstyr til robot Leverandør Utstyr Navn Artikkel nr. Pris Antall Sum Schneider Electric [7] Nødstopp bryter Nødstopp boks trykk/vri 2nc XALK178F stk Schneider Electric [8] Sikkerhets modul, 2 XPSDMB1132P stk Sikkerhets modul magnetbrytere 24VDC Schneider Electric [9] Magnetisk Dørbryter nøkkel XCSLF stk dørbryter mag. 24V 3NC 3NC Solheim Gjerdenett [10] Sikkerhetsgjerde Nylofor 2D Super 900 pr 12 m lm Byggarbeider/mekaniker 650 7,5t 4875 pr/t +moms Byggarbeider/mekaniker 650 7,5t 4875 pr/t +moms SUM Tabell 1 Viser et delvis prisoverslag Det har vært vanskelig å få kontakt med leverandører som ville hjelpe oss med priser, derfor er ikke prisoverslaget et endelig resultat på hva det vil koste Brødrene Aa. Page 22 of 35

24 Kapittel 5 Universal robot 5 Universal robot 5 eller forkortet UR-5 er produsert i Danmark av selskapet Universal Robots. Selskapet ble startet i 2003 av gründere som studerte robot markedet og fant ut at det bare ble produsert dyre og tunge roboter. Det var da de kom opp med ideen med å utvikle en robot som var lett og billig som kan brukes i industrien til forskjellige arbeidsoppgaver. I dag driver selskapet fortsatt med salg og utvikling av robot. Figur 11: Viser Universal robot 5 med styringsskap og touchpanel [11]. 5.1 Funksjon UR-5 er en robotarm som kan programmeres til å bevege et verktøy og ved hjelp av elektriske signaler kan den kommunisere med andre maskiner slik at den kan fungere i en prosess. Det er mulig å programmere UR-5 til å bevege verktøyet langs en ønsket bane ved hjelp av PolyScope som er Universal robots programmeringsgrensesnitt. UR-5 blir levert med et touchpanel hvor man lett kan programmere den til å gjøre det man vil og ved å holde inne «Læreknappen» som er på baksiden av touchpanelet da kan man dra robotarmen i en ønsket bane. Den vil da gjenta denne operasjonen. Når det gjelder sikkerhet er det mulig å jobbe ved siden av UR-5 uten at den vil være til skade for mennesker og utstyr rundt. Dette er fordi UR-5 har innebygd sensor som gjør at den stopper dersom den må presse med et trykk høyere enn 150 newton når den beveger seg. Page 23 of 35

25 Derfor var UR-5 et bedre alternativ til å simulere arbeidsoppgaven enn Brødrene Aa sin KUKA KR som må gjerdes inne på grunn av fare for liv og helse. Annen grunn til at det var mer praktisk for oss er at vi har UR-5 tilgjengelig på Høgskolen. 5.2 Gjennomføring For å simulere arbeidsoppgaven til KUKA-roboten som CNC-fres bestemte vi oss for å programmere UR-5 til å skjære ut former i pepperkakedeig. Vi kunne brukt «Læreknappen», men vi valgte å programmere den manuelt for å få mer nøyaktighet i arbeidet. For å gjøre det brukervennlig lagde vi et java program med Graphical User Interface (GUI) se vedlegg 3. Funksjonen til programmet er å sende start signal til UR-5 for å starte de innprogrammerte operasjonene. Start signalet vil bli sendt fra datamaskinen til Arduinokortet via TCP/IP, derfra vil signalet gå fra den digitale utgangen og fram den digitale inngangen på UR Bruker veiledning For å starte programmet må man først koble programmet til UR-5 roboten ved å trykke på «Connect to robot», deretter er det bare å trykke på hvilken form man vil ha. Vi har også tatt med at vi kan bytte verktøy ved å åpne og lukke griperen. Figur12: Viser hvordan UR-5 sin GUI ser ut. Page 24 of 35

26 Figur 13: Viser simuleringen av CNC fres til presentasjon. 5.4 Utfordring Det var en utfordring for å få UR-5 og datamaskinen til å fungere sammen siden roboten stoppet med en gang programmet ble kjørt. For å hindre at UR-5 stoppet brukte vi et Arduino Uno kort med Wifi tilkobling til å kommunisere med UR-5 sine digitale innganger. Neste utfordring var når vi koblet til Arduino kortet, da det plutselig ikke ville motta kommandoer lengre og årsaken til det tror vi er en systemfeil. Vi kom ikke fram til en løsning for å ordne dette, men ved å starte og koble kortet til på nytt fungerte det. Figur 14: Arduino Uno med Wifi tilkobling [14] Page 25 of 35
27 Kapittel 6 Rammer og timer 6.1 Rammer I dette kapittelet skal vi ta for oss hvordan vi planlagte arbeidet med prosjektet, om vi klarte å følge planen vår, samt justeringer vi gjorde underveis. Vi startet med å se etter prosjekt ettersom vi skulle levere prosjektbeskrivelse den Det var litt fram og tilbake til vi til slutt den 18.september bestemte oss for prosjektet vårt hos Brødrene Aa. Denne dagen bestemte vi oss òg for at vi skulle ha møte hver onsdag kl framover. Vi hadde noen tidsrammer som var gitt ut i fra innleveringsfrister i faget, de lyder som følger: - Innlevering av prosjektbeskrivelse Framføring Frist for Rapport Brødrene Aa har ikke gitt noe tidsramme på prosjektet - Prosjektet kan ha utgifter og det er ikke avtalt noen økonomiske rammer Ut i fra dette og den felles kalenderen vår Teamup som nevnt i kapittel 2 satt vi oss noen egne rammer for hovedmål og delmål. Et eksempel er at rapporten skulle være ferdig til 2. desember I tillegg til dette laget vi et gantskjema med de ulike oppgavene vi hadde. På bilde under ser du gantskjema vi lagde, som vi nå skal forklare litt nærmer. Page 26 of 35

28 Figur15: Gantskjema Gantskjemaet viser med blått hvordan vi planlagte arbeidet med hovedmål og delmål på problemstilling 1 og det oransje viser det faktiske bruk på problemstilling 2. Det som står i blått er derfor ikke utførte oppgaver foruten om rapport og HMS-dokumentasjon. Vi flyttet den interne rapportfristen til Timebruk I fagets beskrivelse står det at hver proskjektdeltaker skal ha 225 prosjekttimer, der 60 timer er skoletimer. Derfor skrev hvert gruppemedlem timeliste under hele prosjektfasen. Gruppen vår la opp til timeskriving på slutten av hvert møte, for at timeskrivingen skulle bli gjort. Når vi skrev timer skulle vi skrive kort hva vi gjorde på hver arbeidsøkt. På bilde under ser du et utdrag fra timelisten til en på gruppen fra oktober måned, full timeliste til all på gruppa finner du i vedlegg 6-9. Page 27 of 35

29 Figur 16: viser et utklipp fra timelisten oktober måned for en på gruppen. Lilla betyr skoletimer, kommentarene er for beskrivelse av hva vi gjorde. Page 28 of 35

30 Figur 17: Viser sum timer per uke, samt sum timer til sammen og hvor mange som var skoletimer. På figur 17 ser du samlet timebruk fra uke 34-50, der det er skrevet timer fram til Dette er gjort for og videre kunne lage en grafisk framvisning av jobbingen med prosjektet som vist på figur 18. Page 29 of 35

31 Figur18: Viser ukenummer langs x-aksen fram til uke 50, Y-aksen viser antall arbeidstimer i snitt hver uke. Grafens første topp som er fra uke illustrerer tiden vi så etter prosjekt. Videre i grafen fra uke er hvor vi holdt på med å planlegge hvilken arbeidsmetode og ulike mål vi skulle ha. Fra uke var det en planlagt stopp med prosjektjobbing ettersom det var mange innleveringer i andre fag og Superveka. Resten av grafen viser hvor mye vi jobbet da vi fikk en ny problemstilling og jobbet fram mot presentasjonen. Denne grafen er ikke optimal da det vil være en stor topp på slutten når vi har jobbet med å skrive rapport Oppsummering Vi satte oss rammer i starten av prosjektet som vi ikke helt klarte å følge, men dette var grunnet en ny problemstilling som ble gitt sent i prosjektfasen. Etter den nye problemstillingen laget vi nye rammen, som vi klarte å holde oss godt innenfor. Arbeidsmengden i prosjektet endte på rundt 200 timer per person. Dette mener vi er godkjent når vi har fått så mye innleveringer i andre fag. I tillegg begrenset vi oppgavene ganske mye i den nye problemstillingen, for og faktisk komme i mål til presentasjon og rapportfristen vår. Vi kunne kanskje laget større problemstilling ettersom vi er fem på gruppen. Men vi var litt redd for å ta på oss for mye etter den første problemstillingen som var veldig åpen. Alt i alt har gruppen jobbet bra med faget og prosjektet. Vi vil ta med oss både positive og negative erfaringer til bachelor oppgaven. Page 30 of 35
32 Kapittel 7 Konklusjon I dette prosjektet har vi hatt fokus på styring av prosjektgruppen og resultatet med prosjektet. Med dette har vi delt opp konklusjonen i to deler der vi tar for oss en hoveddel om gangen. 7.1 Styring av gruppen Dette prosjeketet har handlet om gruppearbeid og lære å styre en gruppe som jobber med et prosjekt. Der gruppen skal prøve å bruke all kunnskapen som vi har lært i Ingeniørfagleg systememne og tidligere prosjektarbeidet. Hensikten med dette prosjektet er å få en følelse på hvordan det er å drive prosjekt ute i næringslivet og lære viktige vaner som f.eks. skrive timeliste og møteinnkalling. Det gir også studentene en sjanse til å komme i roller som de ikke har vært i før som f.eks. prosjektleder, som kanskje er den viktigste rollen i prosjektet. Prosjektlederens rolle blir å styre resten av prosjektgruppen, gi oppgaver og passe på at oppgaver blir gjort til en satt tidsfristen. En prosjektleder har ikke bare ansvaret for å passe på at oppgavene blir utført, men hvem som får de ulike oppgavene. Spille på hver enkelt i gruppen sine styrker er noe som kanskje kan løfte et middels prosjekt til et bra prosjekt. Dette er helt klart det mest utfordrerne med å være prosjektleder, siden det godt kan hende at ikke alle i gruppen er klar over sine egne styrker og svakheter. Det er derfor slike prosjektarbeid er så viktig i studiet sånn at en kan lære hvordan han/hun selv fungerer i prosjektgrupper. Vi hadde fem forelesninger med Terje Lyngstad tidligere på høsten der han fortalte om hvor viktig følelser var når det kom til gruppe arbeid. Hvor en må være klar over hvis det var folk i gruppen som følte seg urettferdig behandlet, ikke sett eller «overkjørt». Det å ha en åpen kommunikasjon og faste møter har ført til at personer i grupper har kunnet uttrykket seg på oppgaver de har blitt tildelt og hvor de ser prosjekt gå. Faste møte har også vært en god plass å gi prosjektleder en tilbakemelding på om de trenger mer hjelp med den oppgaven de har blitt tildel eller at de kan hjelpe andre i gruppen som eventuelt trenger det. Innrømme sine svakheter er for mange ikke enkelt, men det er viktig å vite at en ikke krever alt av en person. Følelsen som vi satt igjen med i dette prosjektet var at det hadde testet oss alle på hvordan det er å samarbeide med personen som har forskjellig synspunkter og komme til enighet. Page 31 of 35
33 7.2 Løsning av problemstillingen Som vi har nevnt tidligere måtte vi endre problemstilling og dette skyldes dårlig kommunikasjon mellom gruppen og bedriften. Gruppen var ikke flink nok til å undersøke hva bedriften ønsket og hadde behov for. Det var ikke satt opp en spesifikk problemstilling i begynnelsen av prosjektet og det var mange spørsmål som ikke var klargjort før gruppen begynte på prosjektet. Dette var en hard og lærerik erfaring for gruppen. Den endelige problemstillingen omhandlet å finne dokumentasjon om roboten som Brødrene Aa ville igangsette og generelt lære mer om robot. Vi har vært heldig som har fått bruke roboten på skolen, sånn at vi har kunne lage en prototype til presentasjonen. Med denne roboten fikk vi innblikk i hvordan en 6-akset robot kunne bli brukt som CNC-fres. Vi har hatt kontakt med personer ute i næringslivet som har mer erfaring og som har svart på eventuelle spørsmål som vi har rundt sikkerhet og styring av robot. Gruppen tok kontakt med Erik Kyrkjebø for å få råd og svar på spørsmål gruppen hadde. Kyrkjebø er viserektor for FoU ved Høgskulen i Sogn og Fjordane og har fra tidligere en doktorgrad i Kybernetikk og robotikk fra NTNU. Etter møte med Kyrkjebø hadde gruppen en klarere forståelse på hva som måtte gjøres og hva informasjon som var viktig å innhente for at en løsning kunne bli overlevert til Brødrene Aa. Gruppen tok også kontakt med KUKA-Norge/Sverige som var imøtekommende og gav gruppen raske svar på de spørsmålene vi hadde. Med svarene KUKA-Norge/Sverige gav oss kunne gruppen lage en mer spesifikk og realistisk løsning til Brødrene Aa. En grafiskløsning var ikke noe som var spesifisert i problemstillingen, men noe som gruppen følte at vi trengte og slik at det var lettere å vise fram hvordan vi så for oss roboten i produksjon. Vi har kommet fram til to grafiske løsninger i dette prosjektet. Første løsningen ble laget etter det Brødrene Aa ønsket seg, den andre løsningen ble laget etter at vi hadde vert kontakt med KUKA-Norgen/Sverige og innhentet mer kunnskap. Største forskjellen på de to løsningen er at Forslag 1. går på skinner mens Forslag 2. står i ro. Brødrene Aa ønsket at roboten skulle gå på skinner sånn at den kunne jobbe på flere arbeidsbenker og større arbeidsstykker. Grunnen til at vi i Forslag 2. gikk vekk i fra skinner var at KUKA-Norge/Sverige ikke anbefalte det for den modellen vi hadde. Page 32 of 35
34 Sikkerhet rundt en robot er ganske omfattende siden det lett kan komme menneske og dyr til skade og det er her mye av vårt fokus har vært. Fokuset var å finne ut hvilke sikkerhetstiltak vi måtte ha med og finne utstyr som utfylte disse kravene. Pris var også noe vi ville ha med slik at Brødrene Aa kunne se ca. hvor mye dette prosjektet kom til å koste. Det var ikke bare sikkerhetsutstyret vi ville lage en oversikt på, men også hva software vi trengte for å kunne bruke roboten som en CNC-fres. Roboten Brødrene Aa har er en gammel modell og det er ikke alle software som er kompatibel med den, som for eksempel KUKA sitt eget CNC-program. Dette CNC programmet er et mellom ledd som omformer signal fra et 2D/3D-modulereingsprogram på datamaskinen til CNC-koordinater til roboten. Page 33 of 35
35 Kilder [2] [1] Zoho, «Zoho.com,» [Internett]. Available: [Funnet ]. [2] Freedcamp, «Freedcamp.com,» [Internett]. Available: [Funnet ]. [3] Arbeidstilsynet, «Arbeidstilsynet.no,» [Internett]. Available: [Funnet ]. [4] Technical Committee ISO/TC, «NS-EN ISO Del 1: Roboter,» Norsk Standard, [5] Technical Committee ISO/TC, «NS-EN ISO Del 2: Robotsystemer og integrering,» Norsk Standard, [6] Media Exapro, «media.exapro.com,» [Internett]. Available: krc1-pe68812/#!prettyphoto. [Funnet ]. [7] Schneider Electric, «Schneiderelectric.no,» [Internett]. Available: [Funnet ]. [8] Schneider Eletric, «SchneiderEletric.no,» [Internett]. Available: [Funnet ]. [9] Schneider Electric, «Schneiderelectric.no,» [Internett]. Available: [Funnet ]. [10] solheimgjerdenet.no, «solheimgjerdenett.no,» [Internett]. Available: [Funnet ]. [11] Universal Robot, «universalrobots.com,» [Internett]. Available: [Funnet ]. [12] Remeberthemilk.com, «remeberthemilk.com,» [Internett]. Available: [Funnet ]. [13] Teamup, «Teamup.com,» [Internett]. Available: [Funnet ]. [14] Xively, «xively.com,» [Internett]. Available: [Funnet ]. Page 34 of 35
36 Vedlegg 1.Poster CALMS_OR Roterende_Bord_KUKA. 3. UR-5_GUI_Program 4. Mail_Fra_KUKA-Norge. 5. Video_Av_Modeller 6. Christian_Timeliste.. 7. Andriii _Timeliste Lars_Martin _Timeliste Morten_ Timeliste Svanhild_Timeliste_ Pressemelding. Alle vedleggene ligger nummerert i vedleggs mappen som medfølger. Page 35 of 35
Robot som 3D fres BACHELOROPPGAVE. Prosjektgruppe: FORPROSJEKTRAPPORT. Christian Marås Morten Sundsøy Svanhild Thomsen Lars Martin Gjeraker
 Robot som 3D fres BACHELOROPPGAVE FORPROSJEKTRAPPORT Prosjektgruppe: Christian Marås Morten Sundsøy Svanhild Thomsen Lars Martin Gjeraker Referanseside TITTEL RAPPORTNR. DATO Bacheloroppgave HO2-300 Forprosjektrapport
Robot som 3D fres BACHELOROPPGAVE FORPROSJEKTRAPPORT Prosjektgruppe: Christian Marås Morten Sundsøy Svanhild Thomsen Lars Martin Gjeraker Referanseside TITTEL RAPPORTNR. DATO Bacheloroppgave HO2-300 Forprosjektrapport
PROSJEKTBESKRIVELSE/PLAN PROSJEKT OR2-300
 Mal for prosjektbeskrivelse PROSJEKTBESKRIVELSE/PLAN PROSJEKT OR2-300 Evt. detaljer i vedlegg med referanse frå de ulike delene Prosjekt (tittel): Sol energi. Dato, signatur:.. Lasse Moen Ola Sundt Melheim....
Mal for prosjektbeskrivelse PROSJEKTBESKRIVELSE/PLAN PROSJEKT OR2-300 Evt. detaljer i vedlegg med referanse frå de ulike delene Prosjekt (tittel): Sol energi. Dato, signatur:.. Lasse Moen Ola Sundt Melheim....
Bachelorprosjekt 2015
 Bachelorprosjekt 2015 Høgskolen i Oslo og Akershus Tam Ha (s171513) Arslan Yousaf (s189135) Gabriel Noraker Alfarrustad (s161910) Eivind Lund (s180381) Phillip Padiernos Næss (s162951) Forprosjekt Prosjektets
Bachelorprosjekt 2015 Høgskolen i Oslo og Akershus Tam Ha (s171513) Arslan Yousaf (s189135) Gabriel Noraker Alfarrustad (s161910) Eivind Lund (s180381) Phillip Padiernos Næss (s162951) Forprosjekt Prosjektets
DAGBOK. Patrick - Opprettet blogside for å kunne legge ut informasjon om hva som skjer underveis i prosjektet.
 DAGBOK Uke 43: Torsdag 28/10 Patrick - Opprettet blogside for å kunne legge ut informasjon om hva som skjer underveis i prosjektet. Uke 44: Mandag 1/11 Gruppen utformet den første statusrapporten til prosjektet.
DAGBOK Uke 43: Torsdag 28/10 Patrick - Opprettet blogside for å kunne legge ut informasjon om hva som skjer underveis i prosjektet. Uke 44: Mandag 1/11 Gruppen utformet den første statusrapporten til prosjektet.
Forprosjekt bachelor-oppgave 2012
 Forprosjekt bachelor-oppgave 2012 Oppgave nr. 4.- Styring av instrumenter. Skrevet av Jan Ingar Sethre. 1 Innhold 1. Mål og rammer... 3 1.1 Bakgrunn... 3 1.2 Mål for prosjektet... 3 1.3 Rammer og forutsetninger...
Forprosjekt bachelor-oppgave 2012 Oppgave nr. 4.- Styring av instrumenter. Skrevet av Jan Ingar Sethre. 1 Innhold 1. Mål og rammer... 3 1.1 Bakgrunn... 3 1.2 Mål for prosjektet... 3 1.3 Rammer og forutsetninger...
Hvordan kan vi i fremtiden bruke minst mulig papir, slik at de store skogene blir bevart?
 IPAP IPAD OG SELVLAGET PAPIR Kort ingress Hvordan kan vi i fremtiden bruke minst mulig papir, slik at de store skogene blir bevart? Innledning Vi er en klasse på 22 elever som har brukt IPAD i snart 3
IPAP IPAD OG SELVLAGET PAPIR Kort ingress Hvordan kan vi i fremtiden bruke minst mulig papir, slik at de store skogene blir bevart? Innledning Vi er en klasse på 22 elever som har brukt IPAD i snart 3
Forprosjektrapport. Automatisk avemballering av pall. Skrevet av Marie Stensvoll og Sondre Wollum Hansen
 Forprosjektrapport Automatisk avemballering av pall Skrevet av Marie Stensvoll og Sondre Wollum Hansen Ingeniørfag - maskin IRM37516 vår 2017 B17M01 Forord I forbindelse med emnet IRM37516 skal det skrives
Forprosjektrapport Automatisk avemballering av pall Skrevet av Marie Stensvoll og Sondre Wollum Hansen Ingeniørfag - maskin IRM37516 vår 2017 B17M01 Forord I forbindelse med emnet IRM37516 skal det skrives
Forprosjekt. Oppgavens tittel: Motorstyring Dato: 24.01.05. Jon Digernes Institutt/studieretning: Program for elektro og datateknikk
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro-og datateknikk 7004 TRONDHEIM Forprosjekt Oppgavens tittel: Motorstyring Dato: 24.01.05 Project title: Gruppedeltakere: Sverre Hamre
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro-og datateknikk 7004 TRONDHEIM Forprosjekt Oppgavens tittel: Motorstyring Dato: 24.01.05 Project title: Gruppedeltakere: Sverre Hamre
Testrapport Prosjekt nr. 2011-22 Det Norske Veritas
 Prosjekt nr. 2011 22 Testrapport Hovedprosjektets tittel Implementering av plugin og utvikling av wizard for Det Norske Veritas Prosjektdeltakere Magnus Strand Nekstad s156159 Jørgen Rønbeck s135779 Dato
Prosjekt nr. 2011 22 Testrapport Hovedprosjektets tittel Implementering av plugin og utvikling av wizard for Det Norske Veritas Prosjektdeltakere Magnus Strand Nekstad s156159 Jørgen Rønbeck s135779 Dato
Information search for the research protocol in IIC/IID
 Information search for the research protocol in IIC/IID 1 Medical Library, 2013 Library services for students working with the research protocol and thesis (hovedoppgaven) Open library courses: http://www.ntnu.no/ub/fagside/medisin/medbiblkurs
Information search for the research protocol in IIC/IID 1 Medical Library, 2013 Library services for students working with the research protocol and thesis (hovedoppgaven) Open library courses: http://www.ntnu.no/ub/fagside/medisin/medbiblkurs
Emneevaluering GEOV272 V17
 Emneevaluering GEOV272 V17 Studentenes evaluering av kurset Svarprosent: 36 % (5 av 14 studenter) Hvilket semester er du på? Hva er ditt kjønn? Er du...? Er du...? - Annet PhD Candidate Samsvaret mellom
Emneevaluering GEOV272 V17 Studentenes evaluering av kurset Svarprosent: 36 % (5 av 14 studenter) Hvilket semester er du på? Hva er ditt kjønn? Er du...? Er du...? - Annet PhD Candidate Samsvaret mellom
Jon Hammeren Nilsson, Anders Emil Rønning, Lars Grini og Erling Fjelstad
 Forprosjektrapport Presentasjon Tittel: Oppgave: Infront SSO Utvikle en Single Sign-on løsning for Infront Periode: 8/1-2013 28/5-2013 Gruppemedlemmer: Jon Hammeren Nilsson, Anders Emil Rønning, Lars Grini
Forprosjektrapport Presentasjon Tittel: Oppgave: Infront SSO Utvikle en Single Sign-on løsning for Infront Periode: 8/1-2013 28/5-2013 Gruppemedlemmer: Jon Hammeren Nilsson, Anders Emil Rønning, Lars Grini
FIRST LEGO League. Härnösand 2012
 FIRST LEGO League Härnösand 2012 Presentasjon av laget IES Dragons Vi kommer fra Härnosänd Snittalderen på våre deltakere er 11 år Laget består av 4 jenter og 4 gutter. Vi representerer IES i Sundsvall
FIRST LEGO League Härnösand 2012 Presentasjon av laget IES Dragons Vi kommer fra Härnosänd Snittalderen på våre deltakere er 11 år Laget består av 4 jenter og 4 gutter. Vi representerer IES i Sundsvall
Presentasjon Bacheloroppgave 25
 Presentasjon Bacheloroppgave 25 Studenters bruk av sosiale medier i utdanning og næringsliv Av Kim André Bjerkestrand og Håkon Olesen Hvem tildelte oppgaven? Høgskolen i Sør-Trøndelag Oppgavestiller: Thor
Presentasjon Bacheloroppgave 25 Studenters bruk av sosiale medier i utdanning og næringsliv Av Kim André Bjerkestrand og Håkon Olesen Hvem tildelte oppgaven? Høgskolen i Sør-Trøndelag Oppgavestiller: Thor
borealis vignett Øyvind Kristiansen 2MKA Medieproduksjon 15. mars 2010
 Øyvind Kristiansen 2MKA borealis Medieproduksjon 15. mars 2010 vignett 2 poor is the pupil who does not surpass his master. -Leonardo DaVinci borealis 2010 Oppgaven var at vi skulle lage en vignett til
Øyvind Kristiansen 2MKA borealis Medieproduksjon 15. mars 2010 vignett 2 poor is the pupil who does not surpass his master. -Leonardo DaVinci borealis 2010 Oppgaven var at vi skulle lage en vignett til
Hovedprosjekt 2014, Høgskolen i Oslo og Akershus
 Forprosjektrapport Gruppe 2 Hovedprosjekt 2014, Høgskolen i Oslo og Akershus 1 INNHOLD 2 Presentasjon... 2 2.1 Gruppen medlemmer... 2 2.2 Oppgave... 2 2.3 Oppdragsgiver... 2 2.4 Veileder... 2 3 Sammendrag...
Forprosjektrapport Gruppe 2 Hovedprosjekt 2014, Høgskolen i Oslo og Akershus 1 INNHOLD 2 Presentasjon... 2 2.1 Gruppen medlemmer... 2 2.2 Oppgave... 2 2.3 Oppdragsgiver... 2 2.4 Veileder... 2 3 Sammendrag...
Hvordan kan man holde kontakten med venner eller familie? Kan du legge til noen ideer på listen? Sende tekstmeldinger. Sende (bursdags-)kort
kort") Hold kontakten! Hvordan kan man holde kontakten med venner eller familie? Kan du legge til noen ideer på listen? Skrive brev Sende tekstmeldinger Ringe dem Sende e-post Sende (bursdags-)kort Koble seg
Hold kontakten! Hvordan kan man holde kontakten med venner eller familie? Kan du legge til noen ideer på listen? Skrive brev Sende tekstmeldinger Ringe dem Sende e-post Sende (bursdags-)kort Koble seg
Hvordan grafisk løsning av visittkort og brosjyrer vil framhevet Tøtta UB?
 Hvordan grafisk løsning av visittkort og brosjyrer vil framhevet Tøtta UB? Rapport fra arbeidsuka Tidsrom: 13.03 17.03 Emil Enevoldsen Emil Enevoldsen 1 av 6 Forord 13 mars til og med 17 mars 2006 hadde
Hvordan grafisk løsning av visittkort og brosjyrer vil framhevet Tøtta UB? Rapport fra arbeidsuka Tidsrom: 13.03 17.03 Emil Enevoldsen Emil Enevoldsen 1 av 6 Forord 13 mars til og med 17 mars 2006 hadde
Vil du at jeg personlig skal hjelpe deg få en listemaskin på lufta, som får kundene til å komme i horder?
 Betaler du for mye for leads? Vil du at jeg personlig skal hjelpe deg få en listemaskin på lufta, som får kundene til å komme i horder? Fra: Sten Morten Misund Asphaug Torshov, Oslo Kjære bedrifteier Jeg
Betaler du for mye for leads? Vil du at jeg personlig skal hjelpe deg få en listemaskin på lufta, som får kundene til å komme i horder? Fra: Sten Morten Misund Asphaug Torshov, Oslo Kjære bedrifteier Jeg
En liten oppskrift på hvordan jeg installert og fikk Xastir til å virke sånn at jeg ble synlig i APRS verden.
 En liten oppskrift på hvordan jeg installert og fikk Xastir til å virke sånn at jeg ble synlig i APRS verden. La meg med en gang si at jeg er rimelig grønn i Linux verden så dere får bære over med meg
En liten oppskrift på hvordan jeg installert og fikk Xastir til å virke sånn at jeg ble synlig i APRS verden. La meg med en gang si at jeg er rimelig grønn i Linux verden så dere får bære over med meg
KROPPEN LEDER STRØM. Sett en finger på hvert av kontaktpunktene på modellen. Da får du et lydsignal.
 KROPPEN LEDER STRØM Sett en finger på hvert av kontaktpunktene på modellen. Da får du et lydsignal. Hva forteller dette signalet? Gå flere sammen. Ta hverandre i hendene, og la de to ytterste personene
KROPPEN LEDER STRØM Sett en finger på hvert av kontaktpunktene på modellen. Da får du et lydsignal. Hva forteller dette signalet? Gå flere sammen. Ta hverandre i hendene, og la de to ytterste personene
Arbeid mot friksjon 1 (lærerveiledning)
") Arbeid mot friksjon 1 (lærerveiledning) Vanskelighetsgrad: Liten, middels Short English summary In this exercise we shall measure the work (W) done when a constant force (F) pulls a block some distance
Arbeid mot friksjon 1 (lærerveiledning) Vanskelighetsgrad: Liten, middels Short English summary In this exercise we shall measure the work (W) done when a constant force (F) pulls a block some distance
INF1510: Obligatorisk oppgave 2: prosjektforslag
 INF1510: Obligatorisk oppgave 2: prosjektforslag Prosjektgruppe: G0Gr33n! Vi er fire jenter og to gutter som har forskjellig bakgrunn i forhold til erfaring og kunnskap. Vi forventer å lære mer om brukerorientert
INF1510: Obligatorisk oppgave 2: prosjektforslag Prosjektgruppe: G0Gr33n! Vi er fire jenter og to gutter som har forskjellig bakgrunn i forhold til erfaring og kunnskap. Vi forventer å lære mer om brukerorientert
Gruppelogg for hovedprosjekt 2009
 Gruppelogg for hovedprosjekt 2009 Før det endelige valget på prosjektet ble tatt brukte gruppen en del tid på å finne forskjellige muligheter for oppgaveemner. Det ble blant annet kontaktet Hafslund produksjon
Gruppelogg for hovedprosjekt 2009 Før det endelige valget på prosjektet ble tatt brukte gruppen en del tid på å finne forskjellige muligheter for oppgaveemner. Det ble blant annet kontaktet Hafslund produksjon
Forprosjektrapport. Gruppe 34. Magnus Dahl Hegge s153549
 Forprosjektrapport Gruppe 34 Bjørn Bergan Abdi Baisa Mads Larsen s161593 s156140 s156151 Magnus Dahl Hegge s153549 Presentasjon Hovedprosjektgruppe 34 består av 4 elever som nå gjennomfører sitt siste
Forprosjektrapport Gruppe 34 Bjørn Bergan Abdi Baisa Mads Larsen s161593 s156140 s156151 Magnus Dahl Hegge s153549 Presentasjon Hovedprosjektgruppe 34 består av 4 elever som nå gjennomfører sitt siste
GYRO MED SYKKELHJUL. Forsøk å tippe og vri på hjulet. Hva kjenner du? Hvorfor oppfører hjulet seg slik, og hva er egentlig en gyro?
 GYRO MED SYKKELHJUL Hold i håndtaket på hjulet. Sett fart på hjulet og hold det opp. Det er lettest om du sjølv holder i håndtakene og får en venn til å snurre hjulet rundt. Forsøk å tippe og vri på hjulet.
GYRO MED SYKKELHJUL Hold i håndtaket på hjulet. Sett fart på hjulet og hold det opp. Det er lettest om du sjølv holder i håndtakene og får en venn til å snurre hjulet rundt. Forsøk å tippe og vri på hjulet.
Kravspesifikasjon. Aker Surveillance. Gruppe 26 Hovedprosjekt ved Høgskolen i Oslo og Akershus. Oslo,
 Kravspesifikasjon Aker Surveillance Gruppe 26 Hovedprosjekt ved Høgskolen i Oslo og Akershus Oslo, 12.01.2013 Public 2013 Aker Solutions Page 1 of 7 Table of Contents Forord... 3 Om bakgrunnen... 3 Presentasjon...
Kravspesifikasjon Aker Surveillance Gruppe 26 Hovedprosjekt ved Høgskolen i Oslo og Akershus Oslo, 12.01.2013 Public 2013 Aker Solutions Page 1 of 7 Table of Contents Forord... 3 Om bakgrunnen... 3 Presentasjon...
FORPROSJEKT KIM LONG VU DUY JOHNNY KHAC NGUYEN ADRIAN SIIM MELSOM HÅKON THORKILDSEN SMØRVIK
 2017 FORPROSJEKT BACHELOROPPGAVE 2017 KIM LONG VU DUY JOHNNY KHAC NGUYEN ADRIAN SIIM MELSOM HÅKON THORKILDSEN SMØRVIK PRESENTASJON OPPGAVE: Oppgaven er å lage en webapplikasjon som kan hjelpe bachelor
2017 FORPROSJEKT BACHELOROPPGAVE 2017 KIM LONG VU DUY JOHNNY KHAC NGUYEN ADRIAN SIIM MELSOM HÅKON THORKILDSEN SMØRVIK PRESENTASJON OPPGAVE: Oppgaven er å lage en webapplikasjon som kan hjelpe bachelor
SLUTTRAPPORT. Glenn Bjørlo. Bedriftspraksis. Høgskolen i Østfold. Halden
 SLUTTRAPPORT Glenn Bjørlo Bedriftspraksis Høgskolen i Østfold Halden 01.12.2014 INNHOLD Overskrift Sidetall Introduksjon 3 Beskrivelse 4 Refleksjon 6 Vedlegg 1: Timebruk 9 Vedlegg 2: Attest 12 Introduksjon
SLUTTRAPPORT Glenn Bjørlo Bedriftspraksis Høgskolen i Østfold Halden 01.12.2014 INNHOLD Overskrift Sidetall Introduksjon 3 Beskrivelse 4 Refleksjon 6 Vedlegg 1: Timebruk 9 Vedlegg 2: Attest 12 Introduksjon
Robotinvasjon Introduksjon ComputerCraft PDF
 Robotinvasjon Introduksjon ComputerCraft PDF Introduksjon Vi har sett enkle datamaskiner. Nå skal vi leke oss med roboter, og finne ut hvordan vi kan få dem til å gjøre forskjellige ting for oss. Steg
Robotinvasjon Introduksjon ComputerCraft PDF Introduksjon Vi har sett enkle datamaskiner. Nå skal vi leke oss med roboter, og finne ut hvordan vi kan få dem til å gjøre forskjellige ting for oss. Steg
Hannametoden en finfin nybegynnermetode for å løse Rubik's kube, en såkalt "layer-by-layer" metode og deretter en metode for viderekommende.
 Hannametoden en finfin nybegynnermetode for å løse Rubik's kube, en såkalt "layer-by-layer" metode og deretter en metode for viderekommende. Olve Maudal (oma@pvv.org) Februar, 2012 Her er notasjonen som
Hannametoden en finfin nybegynnermetode for å løse Rubik's kube, en såkalt "layer-by-layer" metode og deretter en metode for viderekommende. Olve Maudal (oma@pvv.org) Februar, 2012 Her er notasjonen som
Team2 Requirements & Design Document Værsystem
 Requirements & Design Document Høgskolen i Sørøst-Norge Fakultet for teknologi, naturvitenskap og maritime fag Institutt for elektro, IT og kybernetikk SRD 22/01/2018 Systemutvikling og dokumentasjon/ia4412
Requirements & Design Document Høgskolen i Sørøst-Norge Fakultet for teknologi, naturvitenskap og maritime fag Institutt for elektro, IT og kybernetikk SRD 22/01/2018 Systemutvikling og dokumentasjon/ia4412
Læringsplattform for IT-fag basert på HTML5 utviklet i CakePhp
 Læringsplattform for IT-fag basert på HTML5 utviklet i CakePhp { En selvstendig plattform som kan brukes til å formidle kurs på nett med dagsaktuell teknologi. Oppgave 5, av Fredrik Johnsen Oppgavestiller
Læringsplattform for IT-fag basert på HTML5 utviklet i CakePhp { En selvstendig plattform som kan brukes til å formidle kurs på nett med dagsaktuell teknologi. Oppgave 5, av Fredrik Johnsen Oppgavestiller
4. Prøv om du kan finne en tastatur-snarvei for å komme til dette kontrollpanelet.
 Kjenn din PC (Windows7/8) Her velger dere først System and Security og deretter System. 1. Hva slags prosessor har maskinen. Intel Celeron 743 1.3 Ghz. 2. Hvor mye minne har den. 2GB minne er installert
Kjenn din PC (Windows7/8) Her velger dere først System and Security og deretter System. 1. Hva slags prosessor har maskinen. Intel Celeron 743 1.3 Ghz. 2. Hvor mye minne har den. 2GB minne er installert
Lærebok. Opplæring i CuraGuard. CuraGuard Opplæringsbok, - utviklet av SeniorSaken -
 Lærebok Opplæring i CuraGuard 1 Med dette heftet gis en innføring i hvordan bruke CuraGuard og andre sosiale medieplattformer med fokus på Facebook. Heftet er utviklet til fri bruk for alle som ønsker
Lærebok Opplæring i CuraGuard 1 Med dette heftet gis en innføring i hvordan bruke CuraGuard og andre sosiale medieplattformer med fokus på Facebook. Heftet er utviklet til fri bruk for alle som ønsker
Forprosjektrapport. Hovedprosjekt våren 2009. Gruppenr. H09E03. Bent-Henning Nesse Cheko Haji Abbasi Jon Espen Olsen
 Forprosjektrapport Hovedprosjekt våren 2009 Gruppenr. H09E03 Bent-Henning Nesse Cheko Haji Abbasi Jon Espen Olsen Styre- og loggsystem for en testjigg HØGSKOLEN I ØSTFOLD Avdeling for ingeniørfag Postadresse:
Forprosjektrapport Hovedprosjekt våren 2009 Gruppenr. H09E03 Bent-Henning Nesse Cheko Haji Abbasi Jon Espen Olsen Styre- og loggsystem for en testjigg HØGSKOLEN I ØSTFOLD Avdeling for ingeniørfag Postadresse:
Transkribering av intervju med respondent S3:
 Transkribering av intervju med respondent S3: Intervjuer: Hvor gammel er du? S3 : Jeg er 21. Intervjuer: Hvor lenge har du studert? S3 : hm, 2 og et halvt år. Intervjuer: Trives du som student? S3 : Ja,
Transkribering av intervju med respondent S3: Intervjuer: Hvor gammel er du? S3 : Jeg er 21. Intervjuer: Hvor lenge har du studert? S3 : hm, 2 og et halvt år. Intervjuer: Trives du som student? S3 : Ja,
Møtereferater: HP36 uke 2, 10.1.2012: Gruppemedlemmer: Christian Salater Magne Hjermann Zunaira Afzal Tola Sarzali Waleed Abtidon.
 Møtereferater: HP36 uke 2, 10.1.2012: Gruppemedlemmer: Christian Salater Magne Hjermann Zunaira Afzal Tola Sarzali Waleed Abtidon Møtereferat: 1. møte med veileder I dette møtet presenterte vi oss for
Møtereferater: HP36 uke 2, 10.1.2012: Gruppemedlemmer: Christian Salater Magne Hjermann Zunaira Afzal Tola Sarzali Waleed Abtidon Møtereferat: 1. møte med veileder I dette møtet presenterte vi oss for
En bedre måte å håndtere prosjekt, team, oppgaver og innhold
 En bedre måte å håndtere prosjekt, team, oppgaver og innhold Bedre prosjekthå ndtering med metådåtå M-Files går langt utover bare enkel dokumenthåndtering. Den unike arkitekturen drevet av metadata lar
En bedre måte å håndtere prosjekt, team, oppgaver og innhold Bedre prosjekthå ndtering med metådåtå M-Files går langt utover bare enkel dokumenthåndtering. Den unike arkitekturen drevet av metadata lar
Yrkesfaglig grunnutdanning ved Kjelle videregående skole
 Yrkesfaglig grunnutdanning ved Kjelle videregående skole Mekanisk På Kjelle videregående skole kan du ta en yrkesfaglig grunnutdanning som normalt består av to års opplæring på skolen og to års opplæring
Yrkesfaglig grunnutdanning ved Kjelle videregående skole Mekanisk På Kjelle videregående skole kan du ta en yrkesfaglig grunnutdanning som normalt består av to års opplæring på skolen og to års opplæring
Forord. Sammendrag. Kap. 1: Bakgrunn og målsetting for prosjektet. Kap. 2: Prosjektgjennomføring. Kap. 3: Resultatvurdering
 Forord Sammendrag Kap. 1: Bakgrunn og målsetting for prosjektet Kap. 2: Prosjektgjennomføring Kap. 3: Resultatvurdering Kap. 4: Oppsummering og videre planer 2 Forord Denne rapporten er en beskrivelse
Forord Sammendrag Kap. 1: Bakgrunn og målsetting for prosjektet Kap. 2: Prosjektgjennomføring Kap. 3: Resultatvurdering Kap. 4: Oppsummering og videre planer 2 Forord Denne rapporten er en beskrivelse
Slik skal roboter være Enkle Fleksible Rimelige
 Slik skal roboter være Enkle Fleksible Rimelige TEKNISKE SPECIFIKATIONER: www.universal-robots.com/no/produkter 195 INNTJENINGSTID DAGER GJENNOMSNITTLIG Roboter endelig innen rekkevidde Med Universal Robots
Slik skal roboter være Enkle Fleksible Rimelige TEKNISKE SPECIFIKATIONER: www.universal-robots.com/no/produkter 195 INNTJENINGSTID DAGER GJENNOMSNITTLIG Roboter endelig innen rekkevidde Med Universal Robots
Prosjektkategori: Forprosjektrapport Fritt tilgjengelig X Omfang i studiepoeng: 20 Fritt tilgjengelig etter:
 Avdeling for ingeniørfag PROSJEKTRAPPORT Prosjektkategori: Forprosjektrapport Fritt tilgjengelig X Omfang i studiepoeng: 20 Fritt tilgjengelig etter: Fagområde: Konstruksjonsteknikk Rapporttittel: Kvalitetssikring
Avdeling for ingeniørfag PROSJEKTRAPPORT Prosjektkategori: Forprosjektrapport Fritt tilgjengelig X Omfang i studiepoeng: 20 Fritt tilgjengelig etter: Fagområde: Konstruksjonsteknikk Rapporttittel: Kvalitetssikring
FORPROSJEKT BACHELOROPPGAVE 2016
 FORPROSJEKT BACHELOROPPGAVE 2016 Portable boat support 4. APRIL 2016 TORP MEKANISKE VERKSTED AS Innhold Prosjektinformasjon... 2 Bakgrunn... 2 Prosjektmål... 2 Resultatmål... 2 Effektmål... 2 Prosessmål...
FORPROSJEKT BACHELOROPPGAVE 2016 Portable boat support 4. APRIL 2016 TORP MEKANISKE VERKSTED AS Innhold Prosjektinformasjon... 2 Bakgrunn... 2 Prosjektmål... 2 Resultatmål... 2 Effektmål... 2 Prosessmål...
Slope-Intercept Formula
 LESSON 7 Slope Intercept Formula LESSON 7 Slope-Intercept Formula Here are two new words that describe lines slope and intercept. The slope is given by m (a mountain has slope and starts with m), and intercept
LESSON 7 Slope Intercept Formula LESSON 7 Slope-Intercept Formula Here are two new words that describe lines slope and intercept. The slope is given by m (a mountain has slope and starts with m), and intercept
Forprosjekt. Oppgdragsgiver Unikia, Lille grensen 7, 0159 Oslo, Kontaktperson Anders Kose Nervold,
 Hovedprosjekt i data/informasjonsteknologi Høgskolen i Oslo og Akershus Forprosjekt Prosjekttittel Unikia Android applikasjon Gruppe 13 Markus Bugge-Hundere s188909 Morten Wold Aksel Wiig s236326 s232324
Hovedprosjekt i data/informasjonsteknologi Høgskolen i Oslo og Akershus Forprosjekt Prosjekttittel Unikia Android applikasjon Gruppe 13 Markus Bugge-Hundere s188909 Morten Wold Aksel Wiig s236326 s232324
Paradigmeskiftet i HMS
 Paradigmeskiftet i HMS Riana Steen BI- Bergen 09.04.2019 Litt om meg. Riana Steen Førsteamanuensis ved BI Førsteamanuensis ved UIS Emne ansvarlig for beslutninger I krise UIS Lokal- programansvarlig BI
Paradigmeskiftet i HMS Riana Steen BI- Bergen 09.04.2019 Litt om meg. Riana Steen Førsteamanuensis ved BI Førsteamanuensis ved UIS Emne ansvarlig for beslutninger I krise UIS Lokal- programansvarlig BI
Laget av Kristine Gjertsen, Nora Skreosen og Ida Halvorsen Bamble Videregående Skole 1 STAB
 Laget av Kristine Gjertsen, Nora Skreosen og Ida Halvorsen Bamble Videregående Skole 1 STAB Vi har tenkt å lage en liten maskin som utnytter tidevannskraften i vannet. Vi skal prøve å finne ut om det er
Laget av Kristine Gjertsen, Nora Skreosen og Ida Halvorsen Bamble Videregående Skole 1 STAB Vi har tenkt å lage en liten maskin som utnytter tidevannskraften i vannet. Vi skal prøve å finne ut om det er
Prosjektplan nøkkelskinne for nøkkelhåndtering
 Prosjektplan nøkkelskinne for nøkkelhåndtering Av Gaute Lau og Øyvind Lillenes 1 Mål og rammer 1.1 Bakgrunn Electric Time Car har gitt en oppgave som går ut på å lage og designe innmaten til en intelligent
Prosjektplan nøkkelskinne for nøkkelhåndtering Av Gaute Lau og Øyvind Lillenes 1 Mål og rammer 1.1 Bakgrunn Electric Time Car har gitt en oppgave som går ut på å lage og designe innmaten til en intelligent
Forum for Automatisk Produksjon 28. 29. august, Aalesund
 Forum for Automatisk Produksjon 28. 29. august, Aalesund NFA Forum for Automatisk Produksjon August 2013. Page: 1 CAD basert programmering og fresing av komplekse former med industrirobot EU prosjektet
Forum for Automatisk Produksjon 28. 29. august, Aalesund NFA Forum for Automatisk Produksjon August 2013. Page: 1 CAD basert programmering og fresing av komplekse former med industrirobot EU prosjektet
Høgskolen i Østfold. Forprosjektrapport. Forprosjektrapport. Hovedoppgave gruppe B14E03. Thomas Moe og Irfan Mohammadi vår 2014
 Forprosjektrapport Hovedoppgave gruppe B14E03 Thomas Moe og Irfan Mohammadi vår 2014 1 Forord Gruppen består av to studenter og begge er student innenfor studieretningen elektroingeniør ved (HiØ). Ved
Forprosjektrapport Hovedoppgave gruppe B14E03 Thomas Moe og Irfan Mohammadi vår 2014 1 Forord Gruppen består av to studenter og begge er student innenfor studieretningen elektroingeniør ved (HiØ). Ved
Sluttrapport NMT-Pekeboka Signe Torp
 Sluttrapport NMT-Pekeboka Signe Torp Prosjektet er finansiert med midler fra Extrastiftelsen Prosjektnummer 2012/3/0092 Forord Sammendrag Kap. 1: Bakgrunn og målsetting for prosjektet Kap. 2: Prosjektgjennomføring
Sluttrapport NMT-Pekeboka Signe Torp Prosjektet er finansiert med midler fra Extrastiftelsen Prosjektnummer 2012/3/0092 Forord Sammendrag Kap. 1: Bakgrunn og målsetting for prosjektet Kap. 2: Prosjektgjennomføring
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på:
 Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Intek Engineering. av INTEK. v/erling Hovde
 Intek Engineering Møt fremtiden Presentasjon med ny teknologi og et tilgjengelig kompetansemiljø av INTEK v/erling Hovde Visjon INTEK skal være et ledende kunnskapssenter innen industriell automasjon og
Intek Engineering Møt fremtiden Presentasjon med ny teknologi og et tilgjengelig kompetansemiljø av INTEK v/erling Hovde Visjon INTEK skal være et ledende kunnskapssenter innen industriell automasjon og
D E S I G N S K O L E N
 D E S I G N S K O L E N Studieplan for Grafiskdesign med prosjektledelse. (et studie utviklet av IGM og Høyskolen i Gjøvik) 30 studiepoeng 3.1 versjon 18. mai 2004 Navn på studieplan Studiet som beskrives
D E S I G N S K O L E N Studieplan for Grafiskdesign med prosjektledelse. (et studie utviklet av IGM og Høyskolen i Gjøvik) 30 studiepoeng 3.1 versjon 18. mai 2004 Navn på studieplan Studiet som beskrives
Det var ikke lov til å bruke tekst på plakaten og den skulle ha målene 50 70 cm, en
 INNLEDNING Denne oppgaven går ut på å velge en musiker,gruppe eller et orkester og lage en visuell presentasjon av en av deres sanger. Ved å illustrere sangens mening og lage en original ide, vil det gi
INNLEDNING Denne oppgaven går ut på å velge en musiker,gruppe eller et orkester og lage en visuell presentasjon av en av deres sanger. Ved å illustrere sangens mening og lage en original ide, vil det gi
Produktrapport. Produktrapport. Hjelpemiddel portal for Parkinsonforbundet
 Produktrapport Hjelpemiddel portal for Parkinsonforbundet 1 Innhold: Forord ------------------------------------------------------------------------------------------------------2 Planlegging og arbeidsmetode
Produktrapport Hjelpemiddel portal for Parkinsonforbundet 1 Innhold: Forord ------------------------------------------------------------------------------------------------------2 Planlegging og arbeidsmetode
Del IV: Prosessdokumentasjon
 1 2 Forord Dette dokumentet omhandler detaljert beskrivelse av vår arbeidsprosess gjennom hele perioden med prosjektet. Prosessdokumentasjonen er en viktig del av sluttrapporten, og er delt opp i følgende
1 2 Forord Dette dokumentet omhandler detaljert beskrivelse av vår arbeidsprosess gjennom hele perioden med prosjektet. Prosessdokumentasjonen er en viktig del av sluttrapporten, og er delt opp i følgende
Gjennom lydmuren. Jeg har alltid folt meg litt i min egen lille boble. Om a leve med nedsatt horsel. Forsiden
 Om a leve med nedsatt horsel Forsiden Mangler forsidebildet Må ikke ha det. Snakker vi om på tlf. Jeg har alltid folt meg litt i min egen lille boble Innledning Moren Vi blir også kjent med Joakims mor
Om a leve med nedsatt horsel Forsiden Mangler forsidebildet Må ikke ha det. Snakker vi om på tlf. Jeg har alltid folt meg litt i min egen lille boble Innledning Moren Vi blir også kjent med Joakims mor
What's in IT for me? Sted CAMPUS HELGELAND, MO I RANA Tid
 Pris kr. 490,- Påmelding til Tone på tj@kph.no Frist: 10. januar 2019 DET ER UTFORDRENDE Å FÅ AVGRENSET OG SATT MÅL FOR DIGITALISERINGSPROSJEKTER SOM GIR VERDI FOR VIRKSOMHETEN. SINTEF HELGELAND OG ARCTIC
Pris kr. 490,- Påmelding til Tone på tj@kph.no Frist: 10. januar 2019 DET ER UTFORDRENDE Å FÅ AVGRENSET OG SATT MÅL FOR DIGITALISERINGSPROSJEKTER SOM GIR VERDI FOR VIRKSOMHETEN. SINTEF HELGELAND OG ARCTIC
Forberedelse til ditt unike onlinekurs
 Forberedelse til ditt unike onlinekurs Et onlinekurs er tidsstyrt. Mailer og moduler skal sendes og være tilgjengelig til konkrete tider. Og salgsperioden bør være planlagt i detalj. Det krever! Her følger
Forberedelse til ditt unike onlinekurs Et onlinekurs er tidsstyrt. Mailer og moduler skal sendes og være tilgjengelig til konkrete tider. Og salgsperioden bør være planlagt i detalj. Det krever! Her følger
Testrapport for Sir Jerky Leap
 Jasmine Garry (s135600) Line Sørensen (s135590) Fredrik Hoem Grelland (s135595) Tor Anders Gustavsen (s127668) 1 1. Forord Dette dokumentet inneholder informasjon og redegjøring av tester foretatt i forbindelse
Jasmine Garry (s135600) Line Sørensen (s135590) Fredrik Hoem Grelland (s135595) Tor Anders Gustavsen (s127668) 1 1. Forord Dette dokumentet inneholder informasjon og redegjøring av tester foretatt i forbindelse
ASU-4. 4.1 Monitor inng.: 0= frakoblet, 1= kontakt, 2= temperatur, 3= kont. + temp. 3.
 ASU-4 Kode Beskrivelse Fabrikk Bruker innst. innstillinger ASU-4 1.00 Alarmsentral id.: (21 = ASU-4) 21 21 1.01 Software versjon nummer 2.08 2.08 1.13 Tidsforsinkelse på sirene ved alarm kontakt 10 sekund...
ASU-4 Kode Beskrivelse Fabrikk Bruker innst. innstillinger ASU-4 1.00 Alarmsentral id.: (21 = ASU-4) 21 21 1.01 Software versjon nummer 2.08 2.08 1.13 Tidsforsinkelse på sirene ved alarm kontakt 10 sekund...
Presentasjon 2 Gruppe 2 Oppgave 2 Oppdragsgiver 2. Sammendrag 3. Dagens situasjon 3 ServiceNow 3 Coop 3. Mål og rammebetingelser 3 Mål 3 Teknologier 4
 Forprosjektrapport Bachelorprosjekt for gruppe 8, våren 2017 Innholdsfortegnelse Presentasjon 2 Gruppe 2 Oppgave 2 Oppdragsgiver 2 Sammendrag 3 Dagens situasjon 3 ServiceNow 3 Coop 3 Mål og rammebetingelser
Forprosjektrapport Bachelorprosjekt for gruppe 8, våren 2017 Innholdsfortegnelse Presentasjon 2 Gruppe 2 Oppgave 2 Oppdragsgiver 2 Sammendrag 3 Dagens situasjon 3 ServiceNow 3 Coop 3 Mål og rammebetingelser
BAAN IVc. BAAN Data Navigator - Brukerhåndbok
 BAAN IVc BAAN Data Navigator - Brukerhåndbok Utgitt av: Baan Development B.V. P.O.Box 143 3770 AC Barneveld The Netherlands Trykt i Nederland Baan Development B.V. 1997. Med enerett. Informasjonen i dette
BAAN IVc BAAN Data Navigator - Brukerhåndbok Utgitt av: Baan Development B.V. P.O.Box 143 3770 AC Barneveld The Netherlands Trykt i Nederland Baan Development B.V. 1997. Med enerett. Informasjonen i dette
D2 - Papirprototyping av design
 D2 - Papirprototyping av design nnledning Under designprosessen av brukergrensesnitt for systemet WATCH har vi gjennomført en brukbarhetstest med papirprototyp. denne rapporten vil vi beskrive modellen
D2 - Papirprototyping av design nnledning Under designprosessen av brukergrensesnitt for systemet WATCH har vi gjennomført en brukbarhetstest med papirprototyp. denne rapporten vil vi beskrive modellen
SUSOFT RETAIL FOR MOTEBUTIKKER
 SUSOFT RETAIL FOR MOTEBUTIKKER Susoft Retail er en glimrende løsning for salg av klær og sko. I tillegg passer løsningen både enkeltstående butikker og kjeder. Susoft Retail er en nettsky løsning som gir
SUSOFT RETAIL FOR MOTEBUTIKKER Susoft Retail er en glimrende løsning for salg av klær og sko. I tillegg passer løsningen både enkeltstående butikker og kjeder. Susoft Retail er en nettsky løsning som gir
FORPROSJEKTRAPPORT FOR BACHELOROPPGAVE
 FORPROSJEKTRAPPORT FOR BACHELOROPPGAVE VR fremtidens standardverktøy B18M06: Stian Tharaldsen, Jonas Vetle Bech Fjeldberg, Andreas Jakobsen og Ståle Eiklid Moen Vår 2018 Bachelorstudium i ingeniørfag -
FORPROSJEKTRAPPORT FOR BACHELOROPPGAVE VR fremtidens standardverktøy B18M06: Stian Tharaldsen, Jonas Vetle Bech Fjeldberg, Andreas Jakobsen og Ståle Eiklid Moen Vår 2018 Bachelorstudium i ingeniørfag -
FIRST LEGO League. Stjørdal 2012. Daniel Storsve Gutt 11 år 0 Henrikke Leikvoll Jente 11 år 0 Elias Bakk Wik Gutt 11 år 0 Julie Dybwad Jente 11 år 0
 FIRST LEGO League Stjørdal 2012 Presentasjon av laget Hell seniors 2 Vi kommer fra Hell Snittalderen på våre deltakere er 11 år Laget består av 2 jenter og 5 gutter. Vi representerer Lånke skole Type lag:
FIRST LEGO League Stjørdal 2012 Presentasjon av laget Hell seniors 2 Vi kommer fra Hell Snittalderen på våre deltakere er 11 år Laget består av 2 jenter og 5 gutter. Vi representerer Lånke skole Type lag:
Windlass Control Panel
 SIDE-POWER 86-08955 Windlass Control Panel v1.0.2 Windlass Systems Installasjon manual SLEIPNER MOTOR AS P.O. Box 519 N-1612 Fredrikstad Norway Tel: +47 69 30 00 60 Fax: +47 69 30 00 70 w w w. s i d e
SIDE-POWER 86-08955 Windlass Control Panel v1.0.2 Windlass Systems Installasjon manual SLEIPNER MOTOR AS P.O. Box 519 N-1612 Fredrikstad Norway Tel: +47 69 30 00 60 Fax: +47 69 30 00 70 w w w. s i d e
Refleksjonsnotat Web.
 Refleksjonsnotat Web. www.kildebruk.host22.com Mariell Hagen Hovedoppgaven i Web Webdesign: opphavsrett og bruk av kilder Vi har hatt prosjektperiode i litt over 2 uker. Oppgaven var at vi skulle lage
Refleksjonsnotat Web. www.kildebruk.host22.com Mariell Hagen Hovedoppgaven i Web Webdesign: opphavsrett og bruk av kilder Vi har hatt prosjektperiode i litt over 2 uker. Oppgaven var at vi skulle lage
FIRST LEGO League. Haugesund 2012
 FIRST LEGO League Haugesund 2012 Presentasjon av laget TROLL SCOUTS Vi kommer fra Haugesund Snittalderen på våre deltakere er 12 år Laget består av 0 jenter og 6 gutter. Vi representerer Type lag: Ungdomsklubb
FIRST LEGO League Haugesund 2012 Presentasjon av laget TROLL SCOUTS Vi kommer fra Haugesund Snittalderen på våre deltakere er 12 år Laget består av 0 jenter og 6 gutter. Vi representerer Type lag: Ungdomsklubb
Fagerjord sier følgende:
 Arbeidskrav 2A I denne oppgaven skal jeg utføre en analyse av hjemmesiden til Tattoo Temple (http://www.tattootemple.hk) basert på lenker. Analysen er noe basert på et tidligere gruppearbeid. Hjemmesiden
Arbeidskrav 2A I denne oppgaven skal jeg utføre en analyse av hjemmesiden til Tattoo Temple (http://www.tattootemple.hk) basert på lenker. Analysen er noe basert på et tidligere gruppearbeid. Hjemmesiden
Vedlegg Brukertester INNHOLDFORTEGNELSE
 Vedlegg Brukertester INNHOLDFORTEGNELSE Vedlegg Brukertester... 1 Testrapport Wireframe... 2 1. INTRODUKSJON... 2 1.1 Systemoversikt... 2 1.2 Meningen med testen... 2 2 TESTPLAN... 2 2.1 Funksjoner som
Vedlegg Brukertester INNHOLDFORTEGNELSE Vedlegg Brukertester... 1 Testrapport Wireframe... 2 1. INTRODUKSJON... 2 1.1 Systemoversikt... 2 1.2 Meningen med testen... 2 2 TESTPLAN... 2 2.1 Funksjoner som
veileder en god start SMÅBARN OG SKJERMBRUK 1
 En veileder SmåbaRn og skjermbruk en god start SMÅBARN OG SKJERMBRUK 1 Hva er viktigst? Digitale enheter i hjemmet gir hele familien mange nye medieopplevelser og mulighet til kreativ utfoldelse og læring.
En veileder SmåbaRn og skjermbruk en god start SMÅBARN OG SKJERMBRUK 1 Hva er viktigst? Digitale enheter i hjemmet gir hele familien mange nye medieopplevelser og mulighet til kreativ utfoldelse og læring.
veileder en god start SMÅBARN OG SKJERMBRUK 1
 En veileder SmåbaRn og skjermbruk en god start SMÅBARN OG SKJERMBRUK 1 Digitale enheter i hjemmet gir hele familien mange nye medieopplevelser og mulighet til kreativ utfoldelse og læring. Hvordan kan
En veileder SmåbaRn og skjermbruk en god start SMÅBARN OG SKJERMBRUK 1 Digitale enheter i hjemmet gir hele familien mange nye medieopplevelser og mulighet til kreativ utfoldelse og læring. Hvordan kan
REFLEKSJONSBREV FOR SLEIPNER FEBRUAR 2013
 REFLEKSJONSBREV FOR SLEIPNER FEBRUAR 2013 Ås kommune Gjennom arbeidet med karnevalet, opplevde vi at fokusområde ble ivaretatt på flere måter, gjennom at barna delte kunnskaper, tanker og erfaringer, og
REFLEKSJONSBREV FOR SLEIPNER FEBRUAR 2013 Ås kommune Gjennom arbeidet med karnevalet, opplevde vi at fokusområde ble ivaretatt på flere måter, gjennom at barna delte kunnskaper, tanker og erfaringer, og
Bygg et Hus. Steg 1: Prøv selv først. Sjekkliste. Introduksjon. Prøv selv
 Bygg et Hus Introduksjon I denne leksjonen vil vi se litt på hvordan vi kan få en robot til å bygge et hus for oss. Underveis vil vi lære hvordan vi kan bruke løkker og funksjoner for å gjenta ting som
Bygg et Hus Introduksjon I denne leksjonen vil vi se litt på hvordan vi kan få en robot til å bygge et hus for oss. Underveis vil vi lære hvordan vi kan bruke løkker og funksjoner for å gjenta ting som
Norsk (English below): Guide til anbefalt måte å printe gjennom plotter (Akropolis)
: Guide til anbefalt måte å printe gjennom plotter (Akropolis)") Norsk (English below): Guide til anbefalt måte å printe gjennom plotter (Akropolis) 1. Gå til print i dokumentet deres (Det anbefales å bruke InDesign til forberedning for print) 2. Velg deretter print
Norsk (English below): Guide til anbefalt måte å printe gjennom plotter (Akropolis) 1. Gå til print i dokumentet deres (Det anbefales å bruke InDesign til forberedning for print) 2. Velg deretter print
Studentevaluering av undervisning. En håndbok for lærere og studenter ved Norges musikkhøgskole
 Studentevaluering av undervisning En håndbok for lærere og studenter ved Norges musikkhøgskole 1 Studentevaluering av undervisning Hva menes med studentevaluering av undervisning? Ofte forbindes begrepet
Studentevaluering av undervisning En håndbok for lærere og studenter ved Norges musikkhøgskole 1 Studentevaluering av undervisning Hva menes med studentevaluering av undervisning? Ofte forbindes begrepet
Buldrevegg på Kjøsterud skole Prosjektbeskrivelse. - med kostnader og finansieringsplan
 Buldrevegg på Kjøsterud skole Prosjektbeskrivelse - med kostnader og finansieringsplan Drammen, mai 2007 Innledning Drammen klatreklubb (DKK) har høsten 2006 og vinteren 2007 arbeidet med å få til en ny
Buldrevegg på Kjøsterud skole Prosjektbeskrivelse - med kostnader og finansieringsplan Drammen, mai 2007 Innledning Drammen klatreklubb (DKK) har høsten 2006 og vinteren 2007 arbeidet med å få til en ny
Vi har laget noen tema som vi ønsker å diskutere med dere, men det er viktig for oss at du får sagt din mening og fortalt om dine opplevelser.
 Fokusintervju Deltakere tilfeldig utvalg Boligeiere fra prosjektet Leie til eie Innledning Hensikt: Leie til eie er et prosjektarbeid som startet sommeren 2011. Målet har vært at flere skal kunne eie sin
Fokusintervju Deltakere tilfeldig utvalg Boligeiere fra prosjektet Leie til eie Innledning Hensikt: Leie til eie er et prosjektarbeid som startet sommeren 2011. Målet har vært at flere skal kunne eie sin
Det er vi som har de smarte kontaktene. Home Control AS 7250 Melandsjø Mobile: +47 90 98 68 42 perh@homecontrol.no www.homecontrol.
 Det er vi som har de smarte kontaktene Home Control AS 7250 Melandsjø Mobile: +47 90 98 68 42 perh@homecontrol.no www.homecontrol.no Hva er de største fordelene med HomeControl? 1 2 3 Sikrer at elektriske
Det er vi som har de smarte kontaktene Home Control AS 7250 Melandsjø Mobile: +47 90 98 68 42 perh@homecontrol.no www.homecontrol.no Hva er de største fordelene med HomeControl? 1 2 3 Sikrer at elektriske
Hvordan er arbeidsmengden i forhold til omfanget i studiepoeng?
 INF121 Hvor fornøyd er du med kurset? Hvor mye har du lært på kurset? Hvordan er arbeidsmengden i forhold til omfanget i studiepoeng? Har du savnet forkunnskap? Hvis ja, hva har du savnet forkunnskaper
INF121 Hvor fornøyd er du med kurset? Hvor mye har du lært på kurset? Hvordan er arbeidsmengden i forhold til omfanget i studiepoeng? Har du savnet forkunnskap? Hvis ja, hva har du savnet forkunnskaper
Forprosjekt Hovedprosjekt ved Høgskolen i Oslo Våren 2008
 Forprosjekt Hovedprosjekt ved Høgskolen i Oslo Våren 2008 Skrevet av Ole Myrbakken, Fadima Mohamoud, Orji Okoroafor, Karen Arrendondo Side 1 PRESENTASJON Prosjekt tittel: Prosjektperiode: MetaGen 7.jan
Forprosjekt Hovedprosjekt ved Høgskolen i Oslo Våren 2008 Skrevet av Ole Myrbakken, Fadima Mohamoud, Orji Okoroafor, Karen Arrendondo Side 1 PRESENTASJON Prosjekt tittel: Prosjektperiode: MetaGen 7.jan
UKEOPPGAVER 2: SYSTEMUTVIKLINGSPROSESSER OG PROSJEKTARBEID INNSPILL TIL SVAR
 INF 1050 UKEOPPGAVER 2: SYSTEMUTVIKLINGSPROSESSER OG PROSJEKTARBEID INNSPILL TIL SVAR Oppgave 1 a) Foranalyse: Foranalysen kan med fordel gjøres i to trinn. Den første er å undersøke finansiering og øvrige
INF 1050 UKEOPPGAVER 2: SYSTEMUTVIKLINGSPROSESSER OG PROSJEKTARBEID INNSPILL TIL SVAR Oppgave 1 a) Foranalyse: Foranalysen kan med fordel gjøres i to trinn. Den første er å undersøke finansiering og øvrige
HONSEL process monitoring
 6 DMSD has stood for process monitoring in fastening technology for more than 25 years. HONSEL re- rivet processing back in 990. DMSD 2G has been continuously improved and optimised since this time. All
6 DMSD has stood for process monitoring in fastening technology for more than 25 years. HONSEL re- rivet processing back in 990. DMSD 2G has been continuously improved and optimised since this time. All
Gruppe 23. Rapport D2, MMI. Prototypen. Tilstandsdiagrammet til prototypen ser slik ut: Designet på prototypen er som under.
 Rapport D2, MMI Prototypen Tilstandsdiagrammet til prototypen ser slik ut: Designet på prototypen er som under. Man lager en ny avtale ved å trykke på knappen add event oppe i høyre hjørne. For å komme
Rapport D2, MMI Prototypen Tilstandsdiagrammet til prototypen ser slik ut: Designet på prototypen er som under. Man lager en ny avtale ved å trykke på knappen add event oppe i høyre hjørne. For å komme
Kandidat nr. 1, 2 og 3
 Kandidat nr. 1, 2 og 3 Rapport 1 IT202E Bacheloroppgave i Informatikk Vår 2011 Mobilapplikasjonsutvikling med Scrum 1 Innhold Innledning... 3 Overordnet Prosjektplan... 3 Produktbacklog... 5 Sprint planning
Kandidat nr. 1, 2 og 3 Rapport 1 IT202E Bacheloroppgave i Informatikk Vår 2011 Mobilapplikasjonsutvikling med Scrum 1 Innhold Innledning... 3 Overordnet Prosjektplan... 3 Produktbacklog... 5 Sprint planning
En e-bok fra Appex Hvordan få mest ut av Facebook?
 En e-bok fra Appex Hvordan få mest ut av Facebook? Klikk for å dele Denne e-boken er inspirert av og delvis oversatt fra Facebook sin utgivelse «Page Publishing Best Practices». 2 Facebook beste praksis
En e-bok fra Appex Hvordan få mest ut av Facebook? Klikk for å dele Denne e-boken er inspirert av og delvis oversatt fra Facebook sin utgivelse «Page Publishing Best Practices». 2 Facebook beste praksis
Hva skal vi forske på?
 Hva skal vi forske på? Nysgjerrigpermetoden.no (http://www.nysgjerrigpermetoden.no/) er et verktøy der vi kan opprette et arbeidsområde på nett for å arbeide med et prosjekt. Nysgjerrigpermetoden er en
Hva skal vi forske på? Nysgjerrigpermetoden.no (http://www.nysgjerrigpermetoden.no/) er et verktøy der vi kan opprette et arbeidsområde på nett for å arbeide med et prosjekt. Nysgjerrigpermetoden er en
Fresing med industrirobot
 Fresing med industrirobot Er det lønnsomt for Sogndalsbedriften nlink å investere i en robotfres? Av (5) Lars Martin Gjeraker (14) Morten Sundsøy (6) Svanhild N. Thomsen (3) Christian Marås Industrial
Fresing med industrirobot Er det lønnsomt for Sogndalsbedriften nlink å investere i en robotfres? Av (5) Lars Martin Gjeraker (14) Morten Sundsøy (6) Svanhild N. Thomsen (3) Christian Marås Industrial
Mandag : Onsdag : Torsdag : Mandag :
 Prosjektdagbok Mandag 13.01.2014: - Oppmøte på Accenture. Pratet med veileder om oppgaven og avtalte at vi skulle starte med problemstilling, møteintervall og formulering av oppgaven. Tidsperspektivet
Prosjektdagbok Mandag 13.01.2014: - Oppmøte på Accenture. Pratet med veileder om oppgaven og avtalte at vi skulle starte med problemstilling, møteintervall og formulering av oppgaven. Tidsperspektivet
RF-fjernkontroll for South Mountain Technologies
 RF-fjernkontroll for South Mountain Technologies RF i HØGSKOLEN I ØSTFOLD Ingeniørutdanningen Postboks 1192, Valaskjold Besøk: Tuneveien 20 1705 Sarpsborg Telefon: 69 10 40 00 Telefaks: 69 10 40 02 E-post:
RF-fjernkontroll for South Mountain Technologies RF i HØGSKOLEN I ØSTFOLD Ingeniørutdanningen Postboks 1192, Valaskjold Besøk: Tuneveien 20 1705 Sarpsborg Telefon: 69 10 40 00 Telefaks: 69 10 40 02 E-post:
SELVHJELP. Selvhjelp er for alle uansett rolle eller situasjon...
 SELVHJELP Selvhjelp er for alle uansett rolle eller situasjon... Gjennom andre blir vi kjent med oss selv. Selvhjelp starter i det øyeblikket du innser at du har et problem du vil gjøre noe med. Selvhjelp
SELVHJELP Selvhjelp er for alle uansett rolle eller situasjon... Gjennom andre blir vi kjent med oss selv. Selvhjelp starter i det øyeblikket du innser at du har et problem du vil gjøre noe med. Selvhjelp
Årets nysgjerrigper 2009
 Årets nysgjerrigper 2009 Prosjekttittel: Hvorfor kommer det støv? Klasse: 6. trinn Skole: Gjerpen Barneskole (Skien, Telemark) Antall deltagere (elever): 2 Dato: 29.04.2009 Side 1 Vi er to jenter fra 6a
Årets nysgjerrigper 2009 Prosjekttittel: Hvorfor kommer det støv? Klasse: 6. trinn Skole: Gjerpen Barneskole (Skien, Telemark) Antall deltagere (elever): 2 Dato: 29.04.2009 Side 1 Vi er to jenter fra 6a
Forprosjektrapport. Universelt LæringsVerktøy (ULV) Å lage en læringsplattform som tilfredsstiller alle krav til universell
 Å lage en læringsplattform som tilfredsstiller alle krav til universell") Forprosjektrapport Presentasjon Tittel: Oppgave: utforming Periode: Gruppemedlemmer: Hafnor Prosjektgruppe: Veileder: Oppdragsgiver: Kontaktperson: Nettside for gruppa: Universelt LæringsVerktøy (ULV)
Forprosjektrapport Presentasjon Tittel: Oppgave: utforming Periode: Gruppemedlemmer: Hafnor Prosjektgruppe: Veileder: Oppdragsgiver: Kontaktperson: Nettside for gruppa: Universelt LæringsVerktøy (ULV)
Stillasguide for TG og Lignende
 Stillasguide for TG og Lignende Guide: Stillas Innhold 1: Forord... 2 2: Skaff og beregn materialer... 3 3: Materialer... 4 4: Konstruksjon... 4 4.1: Steg 1... 5 4.2: Steg 2... 5 4.3: Steg 3... 6 4.4:
Stillasguide for TG og Lignende Guide: Stillas Innhold 1: Forord... 2 2: Skaff og beregn materialer... 3 3: Materialer... 4 4: Konstruksjon... 4 4.1: Steg 1... 5 4.2: Steg 2... 5 4.3: Steg 3... 6 4.4:
Og det er her hovedutfordringen med keramikk ligger. Først må man finne riktig skjærehastighet i forhold til arbeidsstykkets hardhet for å få den
 Har du nok tid og penger så er det nesten mulig å maskinere alle typer metaller med de verktøyene du har. Du har sikkert ikke ikke råd eller tid til å eksprimentere hver dag for å finne den optimale verktøyløsningen,
Har du nok tid og penger så er det nesten mulig å maskinere alle typer metaller med de verktøyene du har. Du har sikkert ikke ikke råd eller tid til å eksprimentere hver dag for å finne den optimale verktøyløsningen,