LabVIEW and Single-Board RIO to Control a Quadcopter
|
|
|
- Lene Bakken
- 8 år siden
- Visninger:
Transkript
1 LabVIEW and Single-Board RIO to Control a Quadcopter


2 Universitetet i Agder, Grimstad Øyvind Magnussen Master i (2011) PhD Hva er mekatronikk? Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon

3 - - «Meka-hva-for-no?» Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon


4 Intro Problemstillinger Søk etter personer Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon


5 Intro Problemstillinger Søk etter personer Kraftlinjer Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon


6 Intro Problemstillinger Søk etter personer Kraftlinjer Overvåkning Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon


7 Intro Løsning? Helikopter Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon

8 Helikopter Mekanisk komplisert Dyrt! Skjørt Mye vibrasjon Intro Løsning? Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon

9 Enkel konstruksjon Flere motorer Solid Kontroller Intro Quadcopter Intro Kontrollsystem Sensorer sbrio Simulering Testing LabVIEW? Konklusjon

10 Kontroll Posisjon X Y Z Vinkel Roll Pitch Yaw

11 Kontroll Vinkler Roll Pitch

12 Kontroll Vinkler Roll Pitch Yaw

13 Kontroll Vinkler Roll Pitch Yaw

14 Kontroll Vinkler Pitch Roll Yaw Posisjon Z X, Y Underaktuert!

15 Helikopter er stabilt Kontrollsystem Quadcopter er utstabilt...

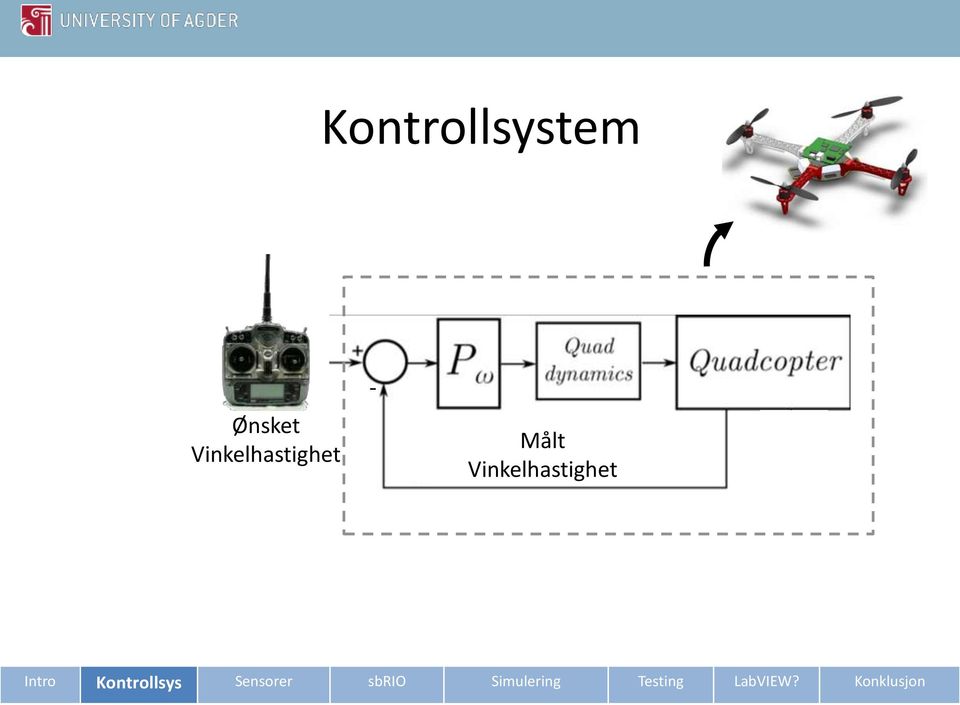
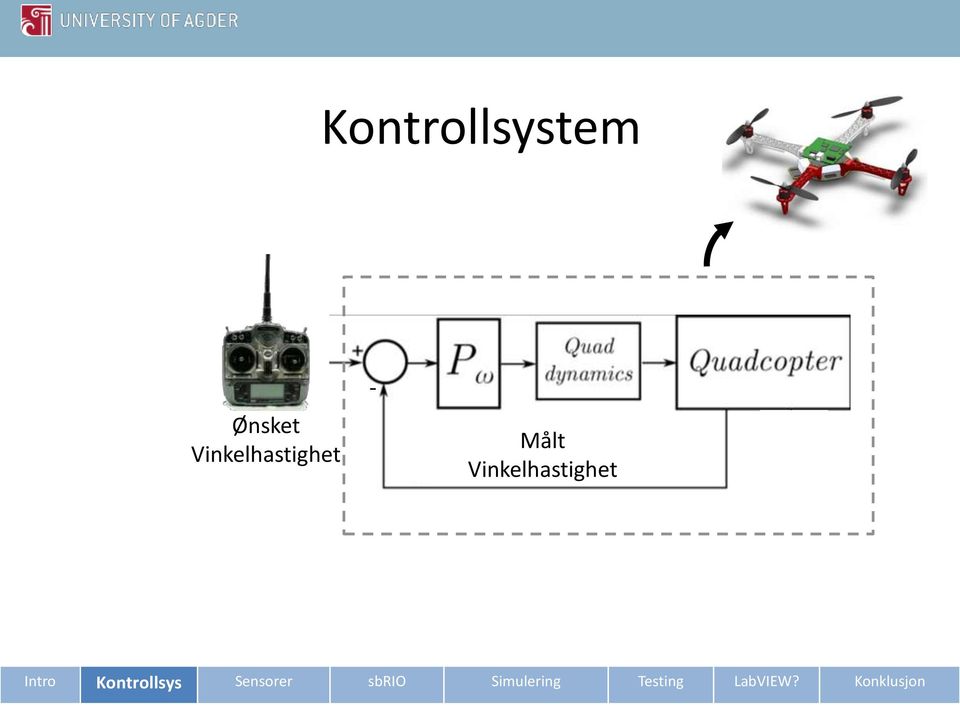
16 Kontrollsystem Ønsket Vinkelhastighet - Målt Vinkelhastighet

17 Kontrollsystem Stabilt ved kontroll av vinkelhastighet
18 Kontrollsystem Ønsket Vinkelhastighet - Målt Vinkelhastighet
19 Kontrollsystem Ønsket Vinkel Målt Vinkel - Målt Vinkelhastighet

20 Kontrollsystem + - P - Målt Posisjon Målt Vinkel Målt Vinkelhastighet



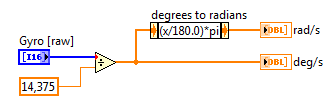
21 Kontrollsystem - Sensorer Vinkelhastighet - Gyroskop Vinkel - Akselerometer Styringsenhet - Fjernkontroll Kontrollbrett Single Board RIO (så klart! )

22 Størrelse < 2kg Designkrav Mindre = bedre Moment = kraft*arm Treghetsmoment = C*arm^2 Motorkontroller > 150Hz
23 sbrio
24 sbrio Programflyt Initialize Read Inputs FPGA to Host Update Motors Scale Inputs Host to FPGA Emergency System Calculate Angles Controll system
25 sbrio FPGA
26 sbrio FPGA
27 sbrio Host

28 sbrio Host Skalering
29 sbrio Host Vinkel estimering
30 sbrio Host Kontrollsystem
31 sbrio Host Nødsystem
32 sbrio Host Oppdatere motorene (FPGA)
33 Simulering SimulationX Likninger for hånd Likninger basert på CAD-Modell
34 Simulering SimulationX
35 Simulering SimulationX


36 Testing!


37 Dyrt! Hvorfor LabVIEW & sbrio? Mikrokontroller = 30kr... Tung! Mikrokontroller = 20g... Kjapp! Mikrokontroller = kjapp nok... Kompilering av FPGA... Intro Kontrollsys Sensorer sbrio Testing LabVIEW? Simulering Konklusjon


38 Utstyr Hvorfor LabVIEW & sbrio? Kamera, protokoller, ekspansjonsmuligheter Én stor platform Simulering, testing, implementering Intro Kontrollsys Sensorer sbrio Testing LabVIEW? Simulering Konklusjon

39 Komplett løsning Simulering Testing Implementering Lett å implementere Bra hardware Kan lett utvides Oppsummering
Control Engineering. State-space Models. Hans-Petter Halvorsen
 Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Control Engineering State-space Models Hans-Petter Halvorsen Dataverktøy MathScript LabVIEW Differensial -likninger Tidsplanet Laplace 2.orden 1.orden Realisering/ Implementering Reguleringsteknikk Serie,
Terrassemarkise priser 2018
 Terrassemarkise priser 2018 Pris i de ulike tabellene gjelder terrassemarkisen levert med manuell sveiv. Pris for motor og fjernkontroll avhenger av type motor og er spesifisert pr produkt. Pris gjelder
Terrassemarkise priser 2018 Pris i de ulike tabellene gjelder terrassemarkisen levert med manuell sveiv. Pris for motor og fjernkontroll avhenger av type motor og er spesifisert pr produkt. Pris gjelder
SG: Spinn og fiktive krefter. Oppgaver
 FYS-MEK1110 SG: Spinn og fiktive krefter 04.05.017 Oppgaver 1 GYROSKOP Du studerer bevegelsen til et gyroskop i auditoriet på Blindern og du måler at presesjonsbevegelsen har en vinkelhastighet på ω =
FYS-MEK1110 SG: Spinn og fiktive krefter 04.05.017 Oppgaver 1 GYROSKOP Du studerer bevegelsen til et gyroskop i auditoriet på Blindern og du måler at presesjonsbevegelsen har en vinkelhastighet på ω =
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK 1110 Eksamensdag: Tirsdag, 3. juni 2014 Tid for eksamen: kl. 9:00 13:00 Oppgavesettet omfatter 6 oppgaver på 4 sider
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK 1110 Eksamensdag: Tirsdag, 3. juni 2014 Tid for eksamen: kl. 9:00 13:00 Oppgavesettet omfatter 6 oppgaver på 4 sider
Tidssynkronisering av distribuerte sanntidssystemer. NI Days 2012 Øyvind Østensen
 Tidssynkronisering av distribuerte sanntidssystemer NI Days 2012 Øyvind Østensen Kompetanse / Teknologi Software Kontrollsystemer Sanntidssystemer Datalogging Analyse og rapportering Hardware Design DAK
Tidssynkronisering av distribuerte sanntidssystemer NI Days 2012 Øyvind Østensen Kompetanse / Teknologi Software Kontrollsystemer Sanntidssystemer Datalogging Analyse og rapportering Hardware Design DAK
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF4380 - Introduksjon til Robotteknologi Eksamensdag: 31 mai, 2017 Tid for eksamen: 14:30, 4 timer Oppgavesettet er på 7 sider
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF4380 - Introduksjon til Robotteknologi Eksamensdag: 31 mai, 2017 Tid for eksamen: 14:30, 4 timer Oppgavesettet er på 7 sider
FYS-MEK 1110 Løsningsforslag Eksamen Vår 2014
 FYS-MEK 1110 Løsningsforslag Eksamen Vår 2014 Oppgave 1 (4 poeng) Forklar hvorfor Charles Blondin tok med seg en lang og fleksibel stang når han balanserte på stram line over Niagara fossen i 1859. Han
FYS-MEK 1110 Løsningsforslag Eksamen Vår 2014 Oppgave 1 (4 poeng) Forklar hvorfor Charles Blondin tok med seg en lang og fleksibel stang når han balanserte på stram line over Niagara fossen i 1859. Han
Sykloide (et punkt på felgen ved rulling)
") Kap. 9+10 Rotasjon av stive legemer Vi skal se på: Vinkelhastighet, vinkelakselerasjon (rep) Sentripetalakselerasjon, baneakselerasjon (rep) Rotasjonsenergi E k Treghetsmoment I Kraftmoment τ Spinn (dreieimpuls):
Kap. 9+10 Rotasjon av stive legemer Vi skal se på: Vinkelhastighet, vinkelakselerasjon (rep) Sentripetalakselerasjon, baneakselerasjon (rep) Rotasjonsenergi E k Treghetsmoment I Kraftmoment τ Spinn (dreieimpuls):
Clino Professional Ozone Generator ONY10-3 and ONY20-3 Instructions for assembly and use. Edition 3.
 Clino Professional Ozone Generator ONY10-3 and ONY20-3 Instructions for assembly and use. Edition 3. ONY-serien Komplett integrerte ozongeneratorer for industrielt bruk, basert på den seneste teknologi
Clino Professional Ozone Generator ONY10-3 and ONY20-3 Instructions for assembly and use. Edition 3. ONY-serien Komplett integrerte ozongeneratorer for industrielt bruk, basert på den seneste teknologi
SCD kurs. Leksjon 9 SCD Legende og Funksjonsspesifikasjon. Classification: Internal
 SCD kurs Leksjon 9 SCD Legende og Funksjonsspesifikasjon 1 SCD Legende og Funksjonsspesifikasjon Leksjon 9 - Innhold Legendens innhold, ett eksempel Sekvenser Black box Funksjonsspesifikasjon som støttedokument
SCD kurs Leksjon 9 SCD Legende og Funksjonsspesifikasjon 1 SCD Legende og Funksjonsspesifikasjon Leksjon 9 - Innhold Legendens innhold, ett eksempel Sekvenser Black box Funksjonsspesifikasjon som støttedokument
Tilstandsrommodeller. Hans- Pe1er Halvorsen, M.Sc.
 Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner
Tilstandsrommodeller Hans- Pe1er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy Spesial>lfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer Transfer- funksjoner
Løsningsforslag til slutteksamen i SESM3401 Styring av mekatroniske systemer
 Høgskolen i Buskerud Løsningsforslag til slutteksamen i SESM3401 Styring av mekatroniske systemer Utarbeidet av Finn Haugen, emnets lærer. Eksamensdato: Mandag 11. desember 2006. Varighet: 4 timer. Vekt
Høgskolen i Buskerud Løsningsforslag til slutteksamen i SESM3401 Styring av mekatroniske systemer Utarbeidet av Finn Haugen, emnets lærer. Eksamensdato: Mandag 11. desember 2006. Varighet: 4 timer. Vekt
Et virtuelt lag over våre fysiske omgivelser Border GO introduserer en ny måte å interagere med stedfestet informasjon
 Et virtuelt lag over våre fysiske omgivelser Border GO introduserer en ny måte å interagere med stedfestet informasjon Jan-Erik Vinje, lokale geomatikkdager Kongsberg 2018 Jan-Erik, utvikler hos Disclaimer:
Et virtuelt lag over våre fysiske omgivelser Border GO introduserer en ny måte å interagere med stedfestet informasjon Jan-Erik Vinje, lokale geomatikkdager Kongsberg 2018 Jan-Erik, utvikler hos Disclaimer:
,QQOHGQLQJ 3-1/ )DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ
DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ") 3-1/ )DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ,QQOHGQLQJ Der det er angitt referanser, er det underforstått at dette er til sider, figurer, ligninger, tabeller etc., i læreboken, dersom andre
3-1/ )DJ 67( 6W\ULQJ DY URPIDUW \ / VQLQJVIRUVODJ WLO YLQJ,QQOHGQLQJ Der det er angitt referanser, er det underforstått at dette er til sider, figurer, ligninger, tabeller etc., i læreboken, dersom andre
Laserdata for dummies. Ivar Oveland 19 oktober 2015
 Laserdata for dummies Ivar Oveland 19 oktober 2015 Laserdata for dummies Norges miljø- og biovitenskapelige universitet 1 INTRODUKSJON LiDAR LiDAR: Light Detection And Ranging Hva er laserdata? INTRODUKSJON
Laserdata for dummies Ivar Oveland 19 oktober 2015 Laserdata for dummies Norges miljø- og biovitenskapelige universitet 1 INTRODUKSJON LiDAR LiDAR: Light Detection And Ranging Hva er laserdata? INTRODUKSJON
Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birgger Vennesland
 Sluttrapport Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birger Vennesland Innledning For taubaner med to liner i løpende bærekabelsystem
Sluttrapport Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birger Vennesland Innledning For taubaner med to liner i løpende bærekabelsystem
Sammenlikningav simuleringsverktøyfor reguleringsteknikk
 Presentasjon ved NFA-dagene 28.-29.4 2010 Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen (finn.haugen@hit.no) Høgskolen i Telemark Innhold: Eksempler på min egen bruk av simuleringsverktøy
Presentasjon ved NFA-dagene 28.-29.4 2010 Sammenlikningav simuleringsverktøyfor reguleringsteknikk Av Finn Haugen (finn.haugen@hit.no) Høgskolen i Telemark Innhold: Eksempler på min egen bruk av simuleringsverktøy
Tilstandsmaskiner (FSM) Kapittel 5
 Kapittel 5") Tilstandsmaskiner (FSM) Kapittel 5 1) Sette opp tilstandsdiagram Tradisjonell konstruksjonsmetode 2) Sette opp tilstandstabell ut fra tilstandsdiagrammet Nåværende tilstand (PS) og input Neste tilstand
Tilstandsmaskiner (FSM) Kapittel 5 1) Sette opp tilstandsdiagram Tradisjonell konstruksjonsmetode 2) Sette opp tilstandstabell ut fra tilstandsdiagrammet Nåværende tilstand (PS) og input Neste tilstand
inf 1510: bruksorientert design
 inf 1510: bruksorientert design våren 2011 Tone Bratteteig design av informasjonssystemer + i:d (informatikk: design, bruk, interaksjon) Roger Antonsen: studielaben & Åpen Sone i dag: velkommen & introduksjon
inf 1510: bruksorientert design våren 2011 Tone Bratteteig design av informasjonssystemer + i:d (informatikk: design, bruk, interaksjon) Roger Antonsen: studielaben & Åpen Sone i dag: velkommen & introduksjon
Øker tilgjengeligheten til vindturbinene
 Øker tilgjengeligheten til vindturbinene De to "skipsdekkene" ruller og hiver på seg, men lasten ytterst på kranen står helt stille. I laboratoriet i Grimstad simulerer forskere og industri hvordan last
Øker tilgjengeligheten til vindturbinene De to "skipsdekkene" ruller og hiver på seg, men lasten ytterst på kranen står helt stille. I laboratoriet i Grimstad simulerer forskere og industri hvordan last
BACHELOR I IDRETTSVITENSKAP MED SPESIALISERING I IDRETTSBIOLOGI 2011/2013. Individuell skriftlig eksamen. IBI 312- Idrettsbiomekanikk og metoder
 BACHELOR I IDRETTSVITENSKAP MED SPESIALISERING I IDRETTSBIOLOGI 2011/2013 Individuell skriftlig eksamen i IBI 312- Idrettsbiomekanikk og metoder Tirsdag 30. april 2013 kl. 10.00-12.00 Hjelpemidler: kalkulator
BACHELOR I IDRETTSVITENSKAP MED SPESIALISERING I IDRETTSBIOLOGI 2011/2013 Individuell skriftlig eksamen i IBI 312- Idrettsbiomekanikk og metoder Tirsdag 30. april 2013 kl. 10.00-12.00 Hjelpemidler: kalkulator
Kap. 9+10 Rotasjon av stive legemer
 Kap. 9+10 Rotasjon a stie legemer Vi skal se på: Vinkelhastighet, inkelakselerasjon (rask rekap) Sentripetalakselerasjon, baneakselerasjon (rask rekap) Rotasjonsenergi E k Treghetsmoment I Kraftmoment
Kap. 9+10 Rotasjon a stie legemer Vi skal se på: Vinkelhastighet, inkelakselerasjon (rask rekap) Sentripetalakselerasjon, baneakselerasjon (rask rekap) Rotasjonsenergi E k Treghetsmoment I Kraftmoment
Ad-hoc / selvkonfigurerende sensornettverk. Knut Øvsthus, PhD Professor Høgskolen i Bergen
 Ad-hoc / selvkonfigurerende sensornettverk Knut Øvsthus, PhD Professor Høgskolen i Bergen Agenda Introduksjon Hvorfor kommer sensornett nå? Arbeid ved FFI CWIN Arbeid ved HiB Veien videre Moore s lov Dobling
Ad-hoc / selvkonfigurerende sensornettverk Knut Øvsthus, PhD Professor Høgskolen i Bergen Agenda Introduksjon Hvorfor kommer sensornett nå? Arbeid ved FFI CWIN Arbeid ved HiB Veien videre Moore s lov Dobling
Teknostart. Introduksjon til MATLAB/Simulink. og LEGO Mindstorms NTNU. Institutt for teknisk kybernetikk. August Versjon 2.4
 Teknostart Introduksjon til MATLAB/Simulink og LEGO Mindstorms NTNU Institutt for teknisk kybernetikk August 2019 Versjon 2.4 INNHOLD Hva er dette?... 3 Introduksjon til Simulink styre en motor... 4 Beskrivelse
Teknostart Introduksjon til MATLAB/Simulink og LEGO Mindstorms NTNU Institutt for teknisk kybernetikk August 2019 Versjon 2.4 INNHOLD Hva er dette?... 3 Introduksjon til Simulink styre en motor... 4 Beskrivelse
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Side 1 Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK 1110 Eksamensdag: Onsdag, 5. juni 2013 Tid for eksamen: kl. 9:00 13:00 Oppgavesettet er på 3 sider Vedlegg: formelark
UNIVERSITETET I OSLO Side 1 Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK 1110 Eksamensdag: Onsdag, 5. juni 2013 Tid for eksamen: kl. 9:00 13:00 Oppgavesettet er på 3 sider Vedlegg: formelark
Automatisk Kvalitetssortering
 Automatisk Kvalitetssortering Ekrem Misimi, PhD, SINTEF Fiskeri og havbruk Forskere som har bidratt med arbeidet: Elling Ruud Øye,, John Reidar Mathiassen, Aleksander Eilertsen, Morten Bondø, Bendik Toldnes,
Automatisk Kvalitetssortering Ekrem Misimi, PhD, SINTEF Fiskeri og havbruk Forskere som har bidratt med arbeidet: Elling Ruud Øye,, John Reidar Mathiassen, Aleksander Eilertsen, Morten Bondø, Bendik Toldnes,
Jernbaneverket SIGNAL Kap.: 4 Hovedkontoret Regler for bygging Utgitt: 01.01.00
 Generelle tekniske krav Side: 1 av 7 1 HENSIKT OG OMFANG...2 2 SIGNALANLEGG...3 2.1 Sikkerhet og tilgjengelighet...3 2.1.1 Sikkerhetsprinsipper...3 2.1.2 Sikkerhetskrav...3 2.1.3 Tilgjengelighetskrav...4
Generelle tekniske krav Side: 1 av 7 1 HENSIKT OG OMFANG...2 2 SIGNALANLEGG...3 2.1 Sikkerhet og tilgjengelighet...3 2.1.1 Sikkerhetsprinsipper...3 2.1.2 Sikkerhetskrav...3 2.1.3 Tilgjengelighetskrav...4
Veiledning for utarbeidelsen av økonomiske analyser som fremlegges for Konkurransetilsynet
 Rev.dato: 16.12.2009 Utarbeidet av: Konkurransetilsynet Side: 1 av 5 Innhold 1 BAKGRUNN OG FORMÅL... 2 2 GENERELLE PRINSIPPER... 2 2.1 KLARHET OG TRANSPARENS... 2 2.2 KOMPLETTHET... 2 2.3 ETTERPRØVING
Rev.dato: 16.12.2009 Utarbeidet av: Konkurransetilsynet Side: 1 av 5 Innhold 1 BAKGRUNN OG FORMÅL... 2 2 GENERELLE PRINSIPPER... 2 2.1 KLARHET OG TRANSPARENS... 2 2.2 KOMPLETTHET... 2 2.3 ETTERPRØVING
UNIVERSITETET I OSLO
 Side av 5 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK Eksamensdag: Onsdag. juni 2 Tid for eksamen: Kl. 9-3 Oppgavesettet er på 5 sider + formelark Tillatte hjelpemidler:
Side av 5 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK Eksamensdag: Onsdag. juni 2 Tid for eksamen: Kl. 9-3 Oppgavesettet er på 5 sider + formelark Tillatte hjelpemidler:
Fresing med keramiske verktøy
 Fresing med keramiske verktøy v/ Olav Tovslid GKN AEROSPACE Norway AS The information contained in this document is GKN Aerospace Norway AS Proprietary information and it shall not either in its original
Fresing med keramiske verktøy v/ Olav Tovslid GKN AEROSPACE Norway AS The information contained in this document is GKN Aerospace Norway AS Proprietary information and it shall not either in its original
Machinery Health Monitoring System
 Machinery Health Monitoring System Machinery Health Monitoring System - MHMS Maskindynamikk AS har utviklet, markedsfører og leverer svært kraftige og fleksible online baserte Machinery Health Monitoring
Machinery Health Monitoring System Machinery Health Monitoring System - MHMS Maskindynamikk AS har utviklet, markedsfører og leverer svært kraftige og fleksible online baserte Machinery Health Monitoring
SIE 4005, 8/10 (3. Forelesn.)
") SIE 4005, 8/10 (3. Forelesn.) Andre forelesning: litt repetisjon 7.7 Arithmetic / Logic unit 7.8 The Shifter 7.9 Datapath representation 7.10 The control word 7.11 Pipelined datapath Tredje forelesning:
SIE 4005, 8/10 (3. Forelesn.) Andre forelesning: litt repetisjon 7.7 Arithmetic / Logic unit 7.8 The Shifter 7.9 Datapath representation 7.10 The control word 7.11 Pipelined datapath Tredje forelesning:
GNSS/INS-integrasjon for veiprising i urbane områder
 GNSS/INS-integrasjon for veiprising i urbane områder Tore Havsø Sæstad Elektronisk systemdesign og innovasjon Innlevert: juni 2014 Hovedveileder: Jon Glenn Omholt Gjevestad, IET Norges teknisk-naturvitenskapelige
GNSS/INS-integrasjon for veiprising i urbane områder Tore Havsø Sæstad Elektronisk systemdesign og innovasjon Innlevert: juni 2014 Hovedveileder: Jon Glenn Omholt Gjevestad, IET Norges teknisk-naturvitenskapelige
Kap Rotasjon av stive legemer
 Kap. 9+10 Rotasjon av stive legemer Vi skal se på: Vinkelhastighet, vinkelakselerasjon (rask rekap) Sentripetalakselerasjon, baneakselerasjon (rask rekap) Rotasjonsenergi E k Treghetsmoment I Kraftmoment
Kap. 9+10 Rotasjon av stive legemer Vi skal se på: Vinkelhastighet, vinkelakselerasjon (rask rekap) Sentripetalakselerasjon, baneakselerasjon (rask rekap) Rotasjonsenergi E k Treghetsmoment I Kraftmoment
KNALLGODE JULETILBUD FRA MODELSPORT
 SPIDEX 3D EN SPENNENDE NYHET!! En ny dimensjon av drone. Denne MÅ prøves! Den kan du fly opp ned!!!!! Derfor 3D av navnet! Den har en ultra presis 6 akset gyro, og ved å flippe den over på ryggen så kan
SPIDEX 3D EN SPENNENDE NYHET!! En ny dimensjon av drone. Denne MÅ prøves! Den kan du fly opp ned!!!!! Derfor 3D av navnet! Den har en ultra presis 6 akset gyro, og ved å flippe den over på ryggen så kan
SPIRIT OF INNOVATION NY PLATTFORM FOR INFORMASJONSSTØTTE PÅ BRO RUNE VOLDEN ULSTEIN POWER & CONTROL AS
 SPIRIT OF INNOVATION NY PLATTFORM FOR INFORMASJONSSTØTTE PÅ BRO RUNE VOLDEN ULSTEIN POWER & CONTROL AS UPC PRODUCT COM Bridge Power & Drives IAS BRUKERGRENSESNITT BRUKERGRENSESNITT BRUKERGRENSESNITT BRUKERGRENSESNITT
SPIRIT OF INNOVATION NY PLATTFORM FOR INFORMASJONSSTØTTE PÅ BRO RUNE VOLDEN ULSTEIN POWER & CONTROL AS UPC PRODUCT COM Bridge Power & Drives IAS BRUKERGRENSESNITT BRUKERGRENSESNITT BRUKERGRENSESNITT BRUKERGRENSESNITT
Løsningsforslag eksamen INF3480 vår 2011
 Løsningsforslag eksamen INF3480 vår 0 Oppgave a) A - Arbeidsrommet er en kule med radius L 3 + L 4. B - Alle rotasjonsaksene er paralelle, roboten beveger seg bare i et plan, dvs. null volum. C - Arbeidsrommet
Løsningsforslag eksamen INF3480 vår 0 Oppgave a) A - Arbeidsrommet er en kule med radius L 3 + L 4. B - Alle rotasjonsaksene er paralelle, roboten beveger seg bare i et plan, dvs. null volum. C - Arbeidsrommet
Prosjekt: «Trygghetspakken i hjemmet» Helsenettverks møte
 Prosjekt: «Trygghetspakken i hjemmet» Helsenettverks møte 28.11.13 Nasjonalt program for implementering og utvikling av velferdsteknologi 10 søknader ble med i denne omgang (32 kommuner) Velferdsteknologifamilie
Prosjekt: «Trygghetspakken i hjemmet» Helsenettverks møte 28.11.13 Nasjonalt program for implementering og utvikling av velferdsteknologi 10 søknader ble med i denne omgang (32 kommuner) Velferdsteknologifamilie
Lattix Montasjebeskrivelse. Lattix. April Montasjebeskrivelse. Prefabrikkert Plass-støpt Fjellfeste. Brokar Mast Skiltklammer
 Lattix Montasjebeskrivelse April 2010 Prefabrikkert Plass-støpt Fjellfeste Brokar Mast Skiltklammer Prefabrikkert betongfundament Installasjon av fundament Isolasjon under fundamentet etter behov. For
Lattix Montasjebeskrivelse April 2010 Prefabrikkert Plass-støpt Fjellfeste Brokar Mast Skiltklammer Prefabrikkert betongfundament Installasjon av fundament Isolasjon under fundamentet etter behov. For
Prosjektgruppe: B18E07. Dato: Bachelorstudium i ingeniørfag Elektro OBD2-LØSNING FOR PAXSTER. Forprosjektrapport for bacheloroppgave
 Prosjektgruppe: B18E07 Dato: 23.3.2018 OBD2-LØSNING Bachelorstudium i ingeniørfag Elektro FOR PAXSTER Forprosjektrapport for bacheloroppgave Innholdsfortegnelse 1. Prosjektinformasjon... 2 2. Bakgrunn...
Prosjektgruppe: B18E07 Dato: 23.3.2018 OBD2-LØSNING Bachelorstudium i ingeniørfag Elektro FOR PAXSTER Forprosjektrapport for bacheloroppgave Innholdsfortegnelse 1. Prosjektinformasjon... 2 2. Bakgrunn...
Universitetet i Agder Fakultet for helse- og idrettsvitenskap EKSAMEN. Time Is)
") Universitetet i Agder Fakultet for helse- og idrettsvitenskap EKSAMEN Emnekode: IDR104 Emnenavn: BioII,del B Dato: 22 mai 2011 Varighet: 3 timer Antallsider inkl.forside 6 Tillatte hjelpemidler: Kalkulator.Formelsamlingi
Universitetet i Agder Fakultet for helse- og idrettsvitenskap EKSAMEN Emnekode: IDR104 Emnenavn: BioII,del B Dato: 22 mai 2011 Varighet: 3 timer Antallsider inkl.forside 6 Tillatte hjelpemidler: Kalkulator.Formelsamlingi
I4Helse. Kommunelegemøtet 2018 Vegard Vige
 I4Helse Kommunelegemøtet 2018 Vegard Vige Universitetet: Teknologi/ingeniørutdanning IT-fag mekatronikk MIL (Mecatronics innovation lab) Senter for kunstig intelligens Bredt samarbeid med næringslivet
I4Helse Kommunelegemøtet 2018 Vegard Vige Universitetet: Teknologi/ingeniørutdanning IT-fag mekatronikk MIL (Mecatronics innovation lab) Senter for kunstig intelligens Bredt samarbeid med næringslivet
Marine Propulsion Control Systems. 9000 Series. Funksjonskoder. ZF Marine Electronics, LLC
 Marine Propulsion Control Systems 9000 Series Funksjonskoder Function Code A0 (Section 5-6.1.1) Processor Identifikasjon: Standardverdi er 00. Verdi 00-05 er tilgjengelige. Avgjør prosessorens Identitet
Marine Propulsion Control Systems 9000 Series Funksjonskoder Function Code A0 (Section 5-6.1.1) Processor Identifikasjon: Standardverdi er 00. Verdi 00-05 er tilgjengelige. Avgjør prosessorens Identitet
TransPocket 1100 TransPocket 1500,1500 RC,1500 TIG. Elektrode & TIG DC SVEISER BEDRE
 TransPocket 1100 TransPocket 1500,1500 RC,1500 TIG Elektrode & TIG DC SVEISER BEDRE Fra nå av er intelligens det viktigste GENERELT Resonant intelligens Den nye standard på sveising Forestill deg at du
TransPocket 1100 TransPocket 1500,1500 RC,1500 TIG Elektrode & TIG DC SVEISER BEDRE Fra nå av er intelligens det viktigste GENERELT Resonant intelligens Den nye standard på sveising Forestill deg at du
Minste kvadraters metode i MATLAB og LabVIEW
 Minste kvadraters metode i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 22.12 2002 1 2 TechTeach Innhold 1 Minste kvadraters metode i MATLAB 7 2 Minste kvadraters
Minste kvadraters metode i MATLAB og LabVIEW Av Finn Haugen (finn@techteach.no) TechTeach (http://techteach.no) 22.12 2002 1 2 TechTeach Innhold 1 Minste kvadraters metode i MATLAB 7 2 Minste kvadraters
Valg for 3. kybernetikk
 1 Valg for 3. kybernetikk Studieprogramleder ITK 2 5 årig Master i teknisk kybernetikk 5v Masteroppgave 5h Fordypningsprosjekt Fordypningsemne Komplementært emne 4v Fra annet prog. emne Fra annet prog.
1 Valg for 3. kybernetikk Studieprogramleder ITK 2 5 årig Master i teknisk kybernetikk 5v Masteroppgave 5h Fordypningsprosjekt Fordypningsemne Komplementært emne 4v Fra annet prog. emne Fra annet prog.
Løsning, gruppeoppgave om corioliskraft og karusell, oppgave 7 uke 15 i FYS-MEK/F 1110 våren 2005
 1 Løsning, gruppeoppgave om corioliskraft og karusell, oppgave 7 uke 15 i FYS-MEK/F 1110 våren 2005 Oppgaven lød: To barn står diamentralt i forhold til hverandre ved ytterkanten på en karusell med diameter
1 Løsning, gruppeoppgave om corioliskraft og karusell, oppgave 7 uke 15 i FYS-MEK/F 1110 våren 2005 Oppgaven lød: To barn står diamentralt i forhold til hverandre ved ytterkanten på en karusell med diameter
Dataveier og optimalisering. Kapittel 9
 Dataveier og optimalisering Kapittel 9 Innhold Designkrav Arealbehov kontra hastighet Pipelining For å økte ytelsen til en krets Ressursdeling For å minke arealbehovet Overordnede designkrav: Designet
Dataveier og optimalisering Kapittel 9 Innhold Designkrav Arealbehov kontra hastighet Pipelining For å økte ytelsen til en krets Ressursdeling For å minke arealbehovet Overordnede designkrav: Designet
INTRO I denne oppgaven skal jeg ta leseren gjennom hovedelementene i det elektriske fordelingssystemet om bord på Nansen-klasse fregatter.
 INTRO I denne oppgaven skal jeg ta leseren gjennom hovedelementene i det elektriske fordelingssystemet om bord på Nansen-klasse fregatter. Flåto, Sindre Fagerholt EA-0 NANSEN-KLASSEN Generatoranlegget
INTRO I denne oppgaven skal jeg ta leseren gjennom hovedelementene i det elektriske fordelingssystemet om bord på Nansen-klasse fregatter. Flåto, Sindre Fagerholt EA-0 NANSEN-KLASSEN Generatoranlegget
MONTERING AV FORSTERKERBRAKETT OG FESTEBRAKETT FOR GM 800 & GM1000 PORTÅPNERE TIL GRANDAL GARASJEPORTER
 1 2 3 4 MONTERING AV FORSTERKERBRAKETT OG FESTEBRAKETT FOR GM 800 & GM1000 PORTÅPNERE TIL GRANDAL GARASJEPORTER 5 Programmering og menyer for GM800 og GM1000 1. Før programmeringen starter må porten åpnes
1 2 3 4 MONTERING AV FORSTERKERBRAKETT OG FESTEBRAKETT FOR GM 800 & GM1000 PORTÅPNERE TIL GRANDAL GARASJEPORTER 5 Programmering og menyer for GM800 og GM1000 1. Før programmeringen starter må porten åpnes
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på:
 Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Vevsmekanikk og refleks 3
 Seksjon 1 Vevsmekanikk og refleks 3 Definer stivhet og Youngs modul (elastisitetsmodul). Forklar hvorfor Youngs modul er nødvendig for å sammenligne forskjellige vev. Nevn og forklar 5 av de 8 faktorer
Seksjon 1 Vevsmekanikk og refleks 3 Definer stivhet og Youngs modul (elastisitetsmodul). Forklar hvorfor Youngs modul er nødvendig for å sammenligne forskjellige vev. Nevn og forklar 5 av de 8 faktorer
Modul nr. 1173 Bygging og programmering av robot - 5. trinn
 Modul nr. 1173 Bygging og programmering av robot - 5. trinn Tilknyttet rom: Newton Alta 1173 Newton håndbok - Bygging og programmering av robot - 5. trinn Side 2 Kort om denne modulen Elevene skal gjennom
Modul nr. 1173 Bygging og programmering av robot - 5. trinn Tilknyttet rom: Newton Alta 1173 Newton håndbok - Bygging og programmering av robot - 5. trinn Side 2 Kort om denne modulen Elevene skal gjennom
E K S A M E N FAKULTET FOR TEKNOLGI OG REALFAG. Emnekode: ELE217 Emnenavn: Mikrokontrollere og styresystemer.
 FAKULTET FOR TEKNOLGI OG REALFAG E K S A M E N Emnekode: ELE217 Emnenavn: Mikrokontrollere og styresystemer. Dato: 9. desember 2016 Varighet: 0900-1200 Antall sider inkl. forside: 22 Tillatte hjelpemidler:
FAKULTET FOR TEKNOLGI OG REALFAG E K S A M E N Emnekode: ELE217 Emnenavn: Mikrokontrollere og styresystemer. Dato: 9. desember 2016 Varighet: 0900-1200 Antall sider inkl. forside: 22 Tillatte hjelpemidler:
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK 1110 Eksamensdag: 6 juni 2017 Tid for eksamen: 14:30 18:30 (4 timer) Oppgavesettet er på 4 sider Vedlegg: Formelark Tillatte
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK 1110 Eksamensdag: 6 juni 2017 Tid for eksamen: 14:30 18:30 (4 timer) Oppgavesettet er på 4 sider Vedlegg: Formelark Tillatte
SCD kurs. Leksjon 6 SCD i en sammenheng
 SCD kurs Leksjon 6 SCD i en sammenheng SCD i en sammenheng Et multifaglig samarbeid Bidrag fra andre fagdisipliner SCD Utviklingsløp Drift og vedlikehold Operasjonsmanualer SCD er Et multifaglig samarbeid
SCD kurs Leksjon 6 SCD i en sammenheng SCD i en sammenheng Et multifaglig samarbeid Bidrag fra andre fagdisipliner SCD Utviklingsløp Drift og vedlikehold Operasjonsmanualer SCD er Et multifaglig samarbeid
PWOM - Spesialutstyr for operasjoner i is
 Ref.id.: KS&SMS-3-2.13.8.1-05 Prosedyre Side 1 av 6 1 Hensikt Dette dokumentet beskriver utstyr som fartøyet er utrustet med og som kan benyttes for å øke besetningens situasjonsforståelse og bedre fartøyets
Ref.id.: KS&SMS-3-2.13.8.1-05 Prosedyre Side 1 av 6 1 Hensikt Dette dokumentet beskriver utstyr som fartøyet er utrustet med og som kan benyttes for å øke besetningens situasjonsforståelse og bedre fartøyets
Kalmanfilter HANS-PETTER HALVORSEN, 2012.02.24
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56, N-3901 Porsgrunn,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56, N-3901 Porsgrunn,
Innholdsfortegnelse. Simulering Sentralt støt2 Veiledning til simulering Sentralt støt3 Simulering Skjevt støt4 Veiledning til simulering Skjevt støt5
 ERGO Fysikk. 3FY. AA (Reform 94) - 3. Bevegelsesmengde - 3.4 Støt - Fagstoff Innholdsfortegnelse Simulering Sentralt støt2 Veiledning til simulering Sentralt støt3 Simulering Skjevt støt4 Veiledning til
ERGO Fysikk. 3FY. AA (Reform 94) - 3. Bevegelsesmengde - 3.4 Støt - Fagstoff Innholdsfortegnelse Simulering Sentralt støt2 Veiledning til simulering Sentralt støt3 Simulering Skjevt støt4 Veiledning til
TransPocket 1500 / 1500 RC / 1500 TIG. Elektrode & TIG DC
 TransPocket 1500 / 1500 RC / 1500 TIG Elektrode & TIG DC Fra nå av er intelligens det viktigste GENERELT Resonant intelligens Den nye standard på sveising Forestill deg at du kjører på en bred, stort sett
TransPocket 1500 / 1500 RC / 1500 TIG Elektrode & TIG DC Fra nå av er intelligens det viktigste GENERELT Resonant intelligens Den nye standard på sveising Forestill deg at du kjører på en bred, stort sett
Teknologi for et bedre samfunn. Teknologi for et bedre samfunn
 1 Teknologidagene 2013 Demonstrasjon av Kooperativ ITS og simulering Jo Skjermo Jo.skjermo@sintef.no (gjesteopptreden: Odd Andre Hjelkrem, SINTEF) 2 Agenda Agenda Test Site Norway/Trondheim Kooperative
1 Teknologidagene 2013 Demonstrasjon av Kooperativ ITS og simulering Jo Skjermo Jo.skjermo@sintef.no (gjesteopptreden: Odd Andre Hjelkrem, SINTEF) 2 Agenda Agenda Test Site Norway/Trondheim Kooperative
Modul nr Bygging og styring av robot - LEGO Mindstorms kl
 Modul nr. 1078 Bygging og styring av robot - LEGO Mindstorms 8.-10. kl Tilknyttet rom: Energi og miljørom, Harstad 1078 Newton håndbok - Bygging og styring av robot - LEGO Mindstorms 8.-10. kl Side 2 Kort
Modul nr. 1078 Bygging og styring av robot - LEGO Mindstorms 8.-10. kl Tilknyttet rom: Energi og miljørom, Harstad 1078 Newton håndbok - Bygging og styring av robot - LEGO Mindstorms 8.-10. kl Side 2 Kort
Radiosystemer (RS) Romteknologi og navigasjon. Radioteknikk og kommunikasjon
 Romteknologi og navigasjon. Radioteknikk og kommunikasjon") Radiosystemer (RS) Hovedprofil: Romteknologi og navigasjon Radioteknikk og kommunikasjon Hovedprofil: 7 & 8 sem Radiokommunikasjon Fjernmåling Romteknologi I &II Navigasjonssystemer Radio-SYSTEMER Radio-TEKNIKK
Radiosystemer (RS) Hovedprofil: Romteknologi og navigasjon Radioteknikk og kommunikasjon Hovedprofil: 7 & 8 sem Radiokommunikasjon Fjernmåling Romteknologi I &II Navigasjonssystemer Radio-SYSTEMER Radio-TEKNIKK
Posisjon, forflytning, nivå
 Posisjon, forflytning, nivå 1 Potensiometre Hall-effekt 2 Gjennomsnittlig oppløsning: Et bra viklet potensiometer kan ha oppløsning på 0,1 % av FS Med resistiv film kan man oppnå oppløsning innenfor støygrensen
Posisjon, forflytning, nivå 1 Potensiometre Hall-effekt 2 Gjennomsnittlig oppløsning: Et bra viklet potensiometer kan ha oppløsning på 0,1 % av FS Med resistiv film kan man oppnå oppløsning innenfor støygrensen
UNIVERSITETET I OSLO
 Bokmål Kandidat nummer: UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1050 Eksamensdag: 31. Mai, 2011 Tid for eksamen: 09:00-13:00 Oppgavesettet er på 6 sider Vedlegg:
Bokmål Kandidat nummer: UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1050 Eksamensdag: 31. Mai, 2011 Tid for eksamen: 09:00-13:00 Oppgavesettet er på 6 sider Vedlegg:
KYBERNETIKKLABORATORIET. FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW Temperaturmålinger BNC-2120
 KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
KYBERNETIKKLABORATORIET FAG: Industriell IT DATO: 08.14 OPPG.NR.: LV4. LabVIEW LabVIEW Temperaturmålinger BNC-2120 Lampe/sensor-system u y I denne oppgaven skal vi teste et lampe/sensor-system som vist
Matematikk og fysikk RF3100
 DUMMY Matematikk og fysikk RF3100 Løsningsforslag 7. april 015 Tidsfrist: 15. april 015 Oppgave 1 Her studerer vi et stivt 1 system som består av tre punktmasser m 1 1 kg, m kg, m 3 3 kg. Ved t 0 ligger
DUMMY Matematikk og fysikk RF3100 Løsningsforslag 7. april 015 Tidsfrist: 15. april 015 Oppgave 1 Her studerer vi et stivt 1 system som består av tre punktmasser m 1 1 kg, m kg, m 3 3 kg. Ved t 0 ligger
Det vises til Forskrift om ansettelse og opprykk i undervisnings- og forskerstillinger.
 EN STILLING SOM FØRSTEAMANUENSIS/FØRSTELEKTOR/UNIVERSITETSLEKTOR I MASKINTEKNIKK/MEKATRONIKK VED UNIVERSITETET I AGDER FAKULTET FOR TEKNOLOGI OG REALFAG Ref. 9/08 Ved Universitetet i Agder er det ledig
EN STILLING SOM FØRSTEAMANUENSIS/FØRSTELEKTOR/UNIVERSITETSLEKTOR I MASKINTEKNIKK/MEKATRONIKK VED UNIVERSITETET I AGDER FAKULTET FOR TEKNOLOGI OG REALFAG Ref. 9/08 Ved Universitetet i Agder er det ledig
Økt pasientsikkerhet ved bedre kvalitet på pasientoverlevering/-rapportering i akutt mottak, Stavanger Universitetssykehus? Elsa Søyland 17.10.
 Økt pasientsikkerhet ved bedre kvalitet på pasientoverlevering/-rapportering i akutt mottak, Stavanger Universitetssykehus? Pasientoverlevering i akutt mottak Krysningspunktet mellom pre- og innhospital
Økt pasientsikkerhet ved bedre kvalitet på pasientoverlevering/-rapportering i akutt mottak, Stavanger Universitetssykehus? Pasientoverlevering i akutt mottak Krysningspunktet mellom pre- og innhospital
Kap Rotasjon av stive legemer
 Kap. 9+10 Rotasjon av stive legemer Vi skal se på: Vinkelhastighet, vinkelakselerasjon (rask rekap) Sentripetalakselerasjon, baneakselerasjon (rask rekap) Rotasjonsenergi E k Treghetsmoment I Kraftmoment
Kap. 9+10 Rotasjon av stive legemer Vi skal se på: Vinkelhastighet, vinkelakselerasjon (rask rekap) Sentripetalakselerasjon, baneakselerasjon (rask rekap) Rotasjonsenergi E k Treghetsmoment I Kraftmoment
Itil-prosesser. NIF-ITs arbeid med utbedring av feilen
 Innhold NIF-IT 1 NIF-IT 1.1 Service Level Agreement (SLA) 1.2 Support (SPOC) 1.3 Request Fulfillment 1.4 Incident Management 1.5 Problem Management 1.6 Supplier Management 1.7 Change Management 1.8 Release
Innhold NIF-IT 1 NIF-IT 1.1 Service Level Agreement (SLA) 1.2 Support (SPOC) 1.3 Request Fulfillment 1.4 Incident Management 1.5 Problem Management 1.6 Supplier Management 1.7 Change Management 1.8 Release
Avanserte byggeblokker (Maxfield kap.13 og 17)
") Avanserte byggeblokker (Maxfield kap.13 og 17) Innhold: Kap 13: Embedded prosessorer (prosessorkjerner) Kap 17: Virtuelle komponenter (Intellectual Properties - IPs) INF3430 - H11 1 Organisering av kretskort
Avanserte byggeblokker (Maxfield kap.13 og 17) Innhold: Kap 13: Embedded prosessorer (prosessorkjerner) Kap 17: Virtuelle komponenter (Intellectual Properties - IPs) INF3430 - H11 1 Organisering av kretskort
Overgang fra statistikk til ORC basert fastsettelse av respitt-tall
 Overgang fra statistikk til ORC basert fastsettelse av respitt-tall Agenda 1. Hvorfor behov for endring? 2. Hva er endringene? 3. Hvordan bruker vi ORC? 4. Hva er de praktiske konsekvensene? 5. Blir det
Overgang fra statistikk til ORC basert fastsettelse av respitt-tall Agenda 1. Hvorfor behov for endring? 2. Hva er endringene? 3. Hvordan bruker vi ORC? 4. Hva er de praktiske konsekvensene? 5. Blir det
ITPE2400/DATS2400: Datamaskinarkitektur
 ITPE2400/DATS2400: Datamaskinarkitektur Forelesning 6: Mer om kombinatoriske kretser Aritmetikk Sekvensiell logikk Desta H. Hagos / T. M. Jonassen Institute of Computer Science Faculty of Technology, Art
ITPE2400/DATS2400: Datamaskinarkitektur Forelesning 6: Mer om kombinatoriske kretser Aritmetikk Sekvensiell logikk Desta H. Hagos / T. M. Jonassen Institute of Computer Science Faculty of Technology, Art
Gravitasjonskonstanten
 Gravitasjonskonstanten Morten Stornes Institutt for fysikk, NTNU, N-7491 Trondheim, Norge 19. oktober 2007 Sammendrag Gravitasjonskonstanten har blitt bestemt ved å bruke Cavendish metode. Den ble bestemt
Gravitasjonskonstanten Morten Stornes Institutt for fysikk, NTNU, N-7491 Trondheim, Norge 19. oktober 2007 Sammendrag Gravitasjonskonstanten har blitt bestemt ved å bruke Cavendish metode. Den ble bestemt
Løsningsforslag Eksamen i Fys-mek1110 våren 2010
 Side av Løsningsforslag Eksamen i Fys-mek våren Oppgave (Denne oppgaven teller dobbelt) Ole og Mari vil prøve om lengdekontraksjon virkelig finner sted. Mari setter seg i sitt romskip og kjører forbi Ole,
Side av Løsningsforslag Eksamen i Fys-mek våren Oppgave (Denne oppgaven teller dobbelt) Ole og Mari vil prøve om lengdekontraksjon virkelig finner sted. Mari setter seg i sitt romskip og kjører forbi Ole,
oppgaver fra abels hjørne i dagbladet
 oppgaver fra abels hjørne i dagbladet sett 4 dag 1 1. Hvor mange av de ett hundre første positive heltallene, 1, 2, 3,, 99, 100, er delelig med 2, 3, 4 og 5? A)0 B) 1 C) 2 D) 3 E) 4 2. Ett tusen terninger
oppgaver fra abels hjørne i dagbladet sett 4 dag 1 1. Hvor mange av de ett hundre første positive heltallene, 1, 2, 3,, 99, 100, er delelig med 2, 3, 4 og 5? A)0 B) 1 C) 2 D) 3 E) 4 2. Ett tusen terninger
Bowling by the numbers!
 Bowling by the numbers! Som grunnlag for denne kunnskapen så ble det testet frem en profil for forskjellige snitt. Man startet med å dele inn alle spillere i en av tre grupper, etter deres snitt. Deretter
Bowling by the numbers! Som grunnlag for denne kunnskapen så ble det testet frem en profil for forskjellige snitt. Man startet med å dele inn alle spillere i en av tre grupper, etter deres snitt. Deretter
Klokke for ikke blodig måling av blodsukker
 Kybernetikk i miniformat: Klokke for ikke blodig måling av blodsukker Av Steinar Sælid CTO Prediktor AS Kybernetisk jubileumsdag fredag 7. november 2014 Kort CV meg selv Praksis: Ved transformatorfabrikk
Kybernetikk i miniformat: Klokke for ikke blodig måling av blodsukker Av Steinar Sælid CTO Prediktor AS Kybernetisk jubileumsdag fredag 7. november 2014 Kort CV meg selv Praksis: Ved transformatorfabrikk
Motorstyring, intet problem
 Sikkerhetsbrosjyre 2014 Motorstyring, intet problem AS-i motormoduler for AC-motorer AS-i slave for SEW-frekvensomformere med M12-kontakter og beskyttelsesklasse IP65 tillater datautveksling og parametrisering
Sikkerhetsbrosjyre 2014 Motorstyring, intet problem AS-i motormoduler for AC-motorer AS-i slave for SEW-frekvensomformere med M12-kontakter og beskyttelsesklasse IP65 tillater datautveksling og parametrisering
NI Days 2009 12.03.2009 Drammen
 NI Days 2009 12.03.2009 Drammen Gerhard Gullaksen, SW - ansvarlig i de omtalte prosjekter Tormod Bøe Arnesen, HW - ansvarlig i de omtalte prosjekter EMG Technology AS, Horten, (morselskap): Norautron AS,
NI Days 2009 12.03.2009 Drammen Gerhard Gullaksen, SW - ansvarlig i de omtalte prosjekter Tormod Bøe Arnesen, HW - ansvarlig i de omtalte prosjekter EMG Technology AS, Horten, (morselskap): Norautron AS,
TEKNISK KATALOG 10 Mekanisk variable skilt
 TEKNISK KATALOG 10 Mekanisk variable skilt MEKANISK VARIABLE SKILT BESKRIVELSE Euroskilt Mekanisk Variabelt skilt Mark III. Skiltkassen og cellene er fremstilt av ekstruderte aluminiumsprofiler og aluminiumsplater
TEKNISK KATALOG 10 Mekanisk variable skilt MEKANISK VARIABLE SKILT BESKRIVELSE Euroskilt Mekanisk Variabelt skilt Mark III. Skiltkassen og cellene er fremstilt av ekstruderte aluminiumsprofiler og aluminiumsplater
Observer HANS-PETTER HALVORSEN, 2012.02.24. Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics
 Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Observer HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56,
Telemark University College Department of Electrical Engineering, Information Technology and Cybernetics Observer HANS-PETTER HALVORSEN, 2012.02.24 Faculty of Technology, Postboks 203, Kjølnes ring 56,
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Midtveiseksamen i: FYS1000 Eksamensdag: 23. mars 2017 Tid for eksamen: 14.30-17.30, 3 timer Oppgavesettet er på 8 sider Vedlegg: Formelark
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Midtveiseksamen i: FYS1000 Eksamensdag: 23. mars 2017 Tid for eksamen: 14.30-17.30, 3 timer Oppgavesettet er på 8 sider Vedlegg: Formelark
Elektronikk Systemer Komponenter
 P R O D U KT O VE RS I KT Elektronikk Systemer Komponenter Hydraulikk + Elektronikk 2 Presentasjon Aratron Kurt Wiig AS holder til i moderne lokaler i Stavanger. Våre ingeniører stiller alltid opp for
P R O D U KT O VE RS I KT Elektronikk Systemer Komponenter Hydraulikk + Elektronikk 2 Presentasjon Aratron Kurt Wiig AS holder til i moderne lokaler i Stavanger. Våre ingeniører stiller alltid opp for
Retningsvalg frist : 2015-09-15 Programmet gis i samarbeid med Høgskolen i Bergen (HIB). For mer informasjon se Undervannsteknologi
. For mer informasjon se Undervannsteknologi") Undervannsteknologi - masterstudium (2-årig) MIUVT - 2015 1. år Retningsvalg frist : 2015-09-15 Programmet gis i samarbeid med Høgskolen i Bergen (HIB). For mer informasjon se Undervannsteknologi * Marin
Undervannsteknologi - masterstudium (2-årig) MIUVT - 2015 1. år Retningsvalg frist : 2015-09-15 Programmet gis i samarbeid med Høgskolen i Bergen (HIB). For mer informasjon se Undervannsteknologi * Marin
Ekofisk Livbåt Prosjekt
 Ekofisk Livbåt Prosjekt Et landskap i endring New Platform and Infrastructure Removing old platforms and plugging wells Changing our operating model 2020 Ekofisk - Fremtid Tor Ekofisk Tor 2/4Z Eldfisk
Ekofisk Livbåt Prosjekt Et landskap i endring New Platform and Infrastructure Removing old platforms and plugging wells Changing our operating model 2020 Ekofisk - Fremtid Tor Ekofisk Tor 2/4Z Eldfisk
Emnenavn: Datateknikk. Eksamenstid: 3 timer. Faglærere: Robert Roppestad. Hele oppgavesettet består av 8 oppgaver, samt 1 vedlegg.
 EKSAMEN Emnekode: ITD13012 Dato: 10. mai 2017 Hjelpemidler: To A4-ark (fire sider) med egne notater Emnenavn: Datateknikk Eksamenstid: 3 timer Faglærere: Robert Roppestad Kalkulator som kan lånes av HIØ
EKSAMEN Emnekode: ITD13012 Dato: 10. mai 2017 Hjelpemidler: To A4-ark (fire sider) med egne notater Emnenavn: Datateknikk Eksamenstid: 3 timer Faglærere: Robert Roppestad Kalkulator som kan lånes av HIØ
Lab 1 Kamerageometri med Eigen
 Lab 1 Kamerageometri med Eigen 26.01.2017 Del 1: Introduksjon til Eigen 2 Eigen 3 C++ bibliotek for lineær algebra http://eigen.tuxfamily.org/ «Template bibliotek» «Header only» Flerplatform, Ingen linking!
Lab 1 Kamerageometri med Eigen 26.01.2017 Del 1: Introduksjon til Eigen 2 Eigen 3 C++ bibliotek for lineær algebra http://eigen.tuxfamily.org/ «Template bibliotek» «Header only» Flerplatform, Ingen linking!
FYS3240/4240 Forslag til prosjektoppgave for Lab 4: DAQ-øvelse med LabVIEW
 FYS3240/4240 Forslag til prosjektoppgave for Lab 4: DAQ-øvelse med LabVIEW Jan Kenneth Bekkeng, 11.3.2013 Hensikten med denne øvelsen er å lære DAQ-programmering med utviklingsverktøyet LabVIEW. NB: se
FYS3240/4240 Forslag til prosjektoppgave for Lab 4: DAQ-øvelse med LabVIEW Jan Kenneth Bekkeng, 11.3.2013 Hensikten med denne øvelsen er å lære DAQ-programmering med utviklingsverktøyet LabVIEW. NB: se
Til daglig: «Digitalt tilsyn»
 Implementering av velferdsteknologi: Hvordan påvirker digitalt tilsyn innovasjon i tjenester og hvordan påvirker det organisasjonen? Til daglig: «Digitalt tilsyn» ehelseuka 2014 3. juni 2014, UiA, Campus
Implementering av velferdsteknologi: Hvordan påvirker digitalt tilsyn innovasjon i tjenester og hvordan påvirker det organisasjonen? Til daglig: «Digitalt tilsyn» ehelseuka 2014 3. juni 2014, UiA, Campus
MØTEPROTOKOLL. Fakultetsstyret for Fakultet for kunstfag. Dato: kl. 12:00 14:00 Sted: G2 019 Arkivsak: 14/03867
 MØTEPROTOKOLL Fakultetsstyret for Fakultet for kunstfag Dato: 08.04.2015 kl. 12:00 14:00 Sted: G2 019 Arkivsak: 14/03867 Tilstede: Møtende varamedlemmer: Per Kvist, Anne Grete Lindeland, Per Elias Drabløs,
MØTEPROTOKOLL Fakultetsstyret for Fakultet for kunstfag Dato: 08.04.2015 kl. 12:00 14:00 Sted: G2 019 Arkivsak: 14/03867 Tilstede: Møtende varamedlemmer: Per Kvist, Anne Grete Lindeland, Per Elias Drabløs,
 12524 NO 05/11 JK Bruksanvisning for elektrisk varmer 12524 Les nøye igjennom bruksanvisningen før du tar din Landmann-kvalitetsvarmer i bruk. Ved bruk i henhold til forskriftene er funksjonsforstyrrelser
12524 NO 05/11 JK Bruksanvisning for elektrisk varmer 12524 Les nøye igjennom bruksanvisningen før du tar din Landmann-kvalitetsvarmer i bruk. Ved bruk i henhold til forskriftene er funksjonsforstyrrelser
MODBUS TIL ZIGBEE. Forprosjektrapport
 MODBUS TIL ZIGBEE Forprosjektrapport og I samarbeid med Høgskolen i Østfold og NxTech AS 07.04.2017 Forprosjektrapport FORORD Denne forprosjektrapporten er utarbeidet av to elektronikkingeniørstudenter
MODBUS TIL ZIGBEE Forprosjektrapport og I samarbeid med Høgskolen i Østfold og NxTech AS 07.04.2017 Forprosjektrapport FORORD Denne forprosjektrapporten er utarbeidet av to elektronikkingeniørstudenter
Ferdige design forslag
 Ferdige design forslag For ytterligere forslag, se: http://education.makeblock.com/resource/ * Disse papp figurene er bare inkludert i Neuron Inventor Kit. Happy Rabbit Kanin med forskjellige ansiktsutrykk.
Ferdige design forslag For ytterligere forslag, se: http://education.makeblock.com/resource/ * Disse papp figurene er bare inkludert i Neuron Inventor Kit. Happy Rabbit Kanin med forskjellige ansiktsutrykk.
Oppsummert: Kap 1: Størrelser og enheter
 Oppsummert: Kap 1: Størrelser og enheter s = 3,0 m s = fysisk størrelse 3,0 = måltall = {s} m = enhet = dimensjon = [s] OBS: Fysisk størrelse i kursiv (italic), enhet opprettet (roman) (I skikkelig teknisk
Oppsummert: Kap 1: Størrelser og enheter s = 3,0 m s = fysisk størrelse 3,0 = måltall = {s} m = enhet = dimensjon = [s] OBS: Fysisk størrelse i kursiv (italic), enhet opprettet (roman) (I skikkelig teknisk
Frequency Response and Stability Analysis. Hans- Pe9er Halvorsen, M.Sc.
 Frequency Response and Stability Analysis Hans- Pe9er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy SpesialElfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer
Frequency Response and Stability Analysis Hans- Pe9er Halvorsen, M.Sc. Tilstandsrom- modeller Dataverktøy SpesialElfelle MathScript LabVIEW Differensial - likninger Tidsplanet Laplace Blokk- diagrammer
UNIVERSITETET I OSLO
 Side 1 av 4 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK1110 Eksamensdag: Onsdag 6. juni 2012 Tid for eksamen: Kl. 0900-1300 Oppgavesettet er på 4 sider + formelark
Side 1 av 4 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: FYS-MEK1110 Eksamensdag: Onsdag 6. juni 2012 Tid for eksamen: Kl. 0900-1300 Oppgavesettet er på 4 sider + formelark
FORSØK MED ROTERENDE SYSTEMER
 FORSØK MED ROTERENDE SYSTEMER Laboratorieøvelsen består av 3 forsøk. Forsøk 1: Bestemmelse av treghetsmomentet til roterende punktmasser Hensikt Hensikt med dette forsøket er å bestemme treghetsmomentet
FORSØK MED ROTERENDE SYSTEMER Laboratorieøvelsen består av 3 forsøk. Forsøk 1: Bestemmelse av treghetsmomentet til roterende punktmasser Hensikt Hensikt med dette forsøket er å bestemme treghetsmomentet
Pattern matching algorithms. INF Algoritmer og datastrukturer. Lokalisering av Substrenger. Brute force
 Pattern matching algorithms INF2220 - Algoritmer og datastrukturer HØSTEN 2009 Institutt for informatikk, Universitetet i Oslo Algoritmer for lokalisering av substrenger Brute force Enkleste tenkelige
Pattern matching algorithms INF2220 - Algoritmer og datastrukturer HØSTEN 2009 Institutt for informatikk, Universitetet i Oslo Algoritmer for lokalisering av substrenger Brute force Enkleste tenkelige