Universitetet i Agder 2011
|
|
|
- Mette Mikkelsen
- 8 år siden
- Visninger:
Transkript
1 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 1 Sammendrag Rapporten omhandler en beskrivelse av miniprosjektet knyttet opp til hovedprosjektet: Verktøyskap Rapporten omhandler: Organisering av prosjektet: Gruppen valgte en gruppeleder og hadde ukentlige møter med veileder og møter med oppdragsgiver ved behov. Arbeidet ble lagt til faste tidspunkter og arbeidet ble tidsestimert. Oppgavefordeling ble gjort ved bruk av Ganttskjema. Kravspesifikasjon: Allerede ved første møte med veileder, bedrift og oppdragsgiver, ble kravspesifikasjon fastsatt for så å bli revidert én gang ved et senere møte. Kravspesifikasjonen var sentral i produktutviklingsarbeidet. Beskrivelser av enheter relatert til prosjektet: Prosjektet omfatter mange elementer, for å kunne arbeide systematisk og oversiktlig, valgte gruppen å beskrive de ulike enhetene som er nødvendig for å realisere det totaleproduktet. Produktutvikling (PU) for konseptene: Gruppen brukte PU- metodikk på selve verktøyskapet og kalibreringsenheten separat. Kravspesifikasjonen ble brukt som kundekrav. Prosessen ble benyttet for at valgte konsepter skulle gjenspeile kundens ønsker og krav på en mest eksakt måte. Verktøyrengjøring: Konklusjon: Tanker om hvordan verktøyrengjøring skal implementeres. Beskrivelse av gruppens resultater. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 1

2 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konklusjon Arbeidet i dette prosjektet har naturlig nok hatt en teoretisk karakter, siden det er et forprosjekt til et kommende hovedprosjekt. Gruppens arbeid kan deles opp i følgende punkter: Utvikle et konsept på verktøyskap ved hjelp av produktutviklings- metodikk. Tilegne kunnskap på industrirobot. Tilegne kunnskap på moduler som skal integreres i roboten på Sørkomp. Tilegne kunnskap på enheter som skal implementeres i robot verktøyskapsystemet. Skaffe til veie programvare som skal brukes i utvikling av konseptet. Tilegne kunnskap på aktuell programvare. Bruke programvaren til å utvikle virtuelle demoer og lage programsekvenser. Arbeidet har vært omfatende og det har vært mye å sette seg inn i da ingen av gruppens deltagere har robot- teknologi i sin studieretning. Gruppens deltagere har opplevd en bratt lærekurve og har jobbet jevnt og godt i sammen, ikke minst på grunn av en god prosjektorganisering. Grunnet ytre faktorer (ferieavvikling hos ekstern veileder) som gruppen ikke har hatt kontroll over, har enkelte problemstillinger som var tenkt løst i miniprosjektet, blitt overført til kommende hovedprosjekt. Dette omhandler i hovedsak konsepttesting hvor det er ment at oppdragsgiver skal informeres om aktuelle konsepter og i dialog med gruppen drøfte disse. Avklaringer på eksisterende utstyr, valg og eventuelt bestilling av enkelte komponenter, er også berørt av nevnte faktor. Det arbeidet som nå foreligger dokumentert i denne rapporten er, etter gruppens oppfatning, et meget godt grunnlag for å jobbe videre med hovedprosjektet. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 2

3 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 2 Forord Rapporten er skrevet i faget MAS200 og omhandler miniporsjekt for hovedoppgaven på Universitetet i Agder (UiA), fakultet for teknologi og realfag, ingeniørfag - maskin, bachelorprogram. Miniprosjektet omhandler arbeidet frem til valg av konsepter. Hovedprosjektet er lagt til faget MAS302 ved samme fakultet, og arbeidet vil starter opp i mars Oppgaven er en bestilling fra Sørkomp i Arendal som universitetet har et tett og godt samarbeid med. Sørkomp har stilt med Knut Roger Strøm som kontaktperson og ekstern veileder for prosjektet. Samarbeidet mellom oppdragsgiver og gruppen har fungert utmerket. Gruppen ser på oppgaven som veldig interessant og aktuell, noe som har bidratt med økt interesse for en rekke fagområder, samt en god arbeidsmoral. Forfatterne vil gjerne takke for all hjelp og støttet til dette arbeidet, og ønsker spesielt å trekke frem prosjektets veileder, Geir Hovland, som velvillig har delt av sin kunnskap med gruppen. Vi ser frem til et videre godt samarbeide i hovedprosjektet. Universitetet i Agder DATO Eivind Hansen Gunnar Eikeland UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 3

4 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Innholdsfortegnelse 1 Sammendrag Konklusjon Forord Innholdsfortegnelse Innledning Bakgrunn Formål Problemstilling Avgrensing Prosjektstyring Fremdriftsplan Kravspesifikasjon Beskrivelse av enheter relatert til prosjektet Robot og tilhørende elementer Robot Robotkontrollskap IRC Styringsenhet - FlexPendant Fresemodul Frekvensomformer Programvare RobotStudio RAPID ScreenMaker IRBCAM SolidWorks Produktutvikling Verktøyskap Funksjonsløsningstre - Verktøyskap Beskrivelse av konseptene UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 4

5 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept Konsept Konsept Konsept Konsept Konsept Konsept Konsept Konsept Grovsiling verktøyskap Konsept screening Konsept scoring Konsepttesting Beskrivelse av valgt konsept Generelt Gaffelholder versus sylindrisk hull Montering Åpne/lukke-mekanisme Produktutvikling Lengdekalibrering Funksjonsløsningstre Beskrivelse av konsepter Konsept Konsept Konsept Konsept Konsept Valg av konsept Generelt I industrien i dag UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 5

6 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Grunnlag for valg Konseptrangering Valg Veien videre Verktøyrengjøring Fra miniprosjekt til hovedprosjekt Litteraturliste og referanser Figurliste Vedlegg UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 6

7 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 3 Innledning 3.1 Bakgrunn Robotens inntog i industrien kan vel neppe kalles noen pågående revolusjon i dag. Revolusjonen ligger vel mer i et bredere bruksområde samt at mindre bedrifter kan investere i denne type teknologi uten et alt for stort innhugg i økonomien. Oppdragsgiver for dette prosjektet, Sørkomp, er en bedrift som ble etablert i I oppstartsfasen av firmaet lå hovedfokuset på produksjon av fritids- og redningsbåter i komposittmaterialer. I de senere år har produksjonen rettet seg mer mot offshore subseaindustri. Dette er en industri som stiller strenge krav til produktene, noe som gjenspeiler seg i teknologien som blir benyttet hos underleverandører som Sørkomp. Sørkomp har en industrirobot fra ABB, serie 6640 som benyttes til å frese ut modeller og plugger som blir brukt i deres produksjon av komposittkomponenter. Bedriften har et ønske om å utvide bruken av maskinen og her kommer gruppens arbeid forhåpentligvis til å bidra positivt. Ved utvidet bruk av roboten vil det bli behov for å skifte freseverktøy oftere. Ved å automatisere denne prosessen vil man oppnå flere fordeler. Først og fremst tidsbesparing når verktøybytte må skje hyppig, noe som igjen vil gi kostnadsbesparelser i form av mindre riggetid av verktøy og mindre bruk av personell. Mindre personellhåndtering av verktøyene vil også gi en økt sikkerhet for arbeideren. 3.2 Formål Formålet generelt med hovedprosjektet er å få erfaring i et større prosjektarbeid innenfor faget mekatronikk, der fagene data, elektronikk og mekaniske systemer kombineres. Konkret blir formålet å designe og konstruere et verktøyskap med automatisk verktøybytte, kalibrering av verktøylengde, utvikle menyer og programmer slik at prosessen kan styres automatisk via RAPID- kode (kap ) eller gjennom FlexPendant (kap ). Konseptet må også dimensjoneres og testes ut for å tåle daglig bruk i et produksjonsmiljø. Miniprosjektets formål vil i hovedsak være teoretisk arbeid for å legge til rette for et best mulig resultat av hovedprosjektet. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 7

8 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Problemstilling Oppgaven som ønsket løst gjennom dette prosjektet er utvikling av et automatisk system for bytting, oppbevaring og lengdemåling av freseverktøy. Systemet skal arbeide opp mot en ABB industrirobot (kap ) og må overholde de gitte krav fra oppdragsgiver (kap. 5). Endelig resultat av oppgaven vil være et ferdig produsert, dokumentert og testet system som er klart til å installeres hos oppdragsgiver. Oppgave tekst med original ordlyd finnes i vedlegg 10. Prosjektet er delt inn i to hoveddeler, miniprosjekt og hovedprosjekt, hvor denne rapporten omhandler miniprosjektet. Oversikt over hva miniprosjektet skal innehold og hvilket omfang det skal ha: Anskaffe og sette seg inn i aktuell programvare. Sette seg inn i aktuelle elementer. Utvikle konsepter ved hjelp av PU som er i henhold til kravspesifikasjonene. Grovkonstruksjon av valgte konsepter. Få oversikt over nødvendig utstyr som må bestilles samt bestillings- og levringstider. Bestille utstyr tidsnok for å unngå forsinkelser i progresjonen av prosjektet. Dokumentere prosessene til endelig rapport. 3.4 Avgrensing Prosjektets avgrensning ligger i kravspesifikasjonen som er beskrevet i kapittel 5 og problemstillingen som er omtalt i kapittel 3.4. Det har fra Sørkomp sin side ikke blitt gitt noen økonomiske rammer og følgelig er det ingen økonomiske avgrensninger. Til tross for dette har gruppen valgt bort enkelte løsninger fordi de har vært kostbare. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 8

9 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 4 Prosjektstyring Tidlig i prosjektperioden ble det valgt gruppeleder og avtalt faste ukentlige møter med veileder. Møter med oppdragsgiver ble avtalt å ta ved behov. Siden gruppen kun består av to personer har ansvar og gjøremål blitt fordelt fortløpende utover i prosjektet. Gruppeleder: Eivind Hansen Møte med veileder: Onsdager kl Agenda: Levert alle møtedeltagere dagen før møte. Referat: Levert alle møtedeltagere innen slutten av uken. Gruppens deltagere har hovedsakelig jobbet sammen på skolen i eget grupperom tirsdag, onsdag, torsdag og fredag. Til tross for mye felles arbeid har gruppen benyttet fildelingsverktøyet DropBox for utveksling av filer internt i gruppen. Arbeid som blir lagret her ligger online og blir automatisk synkronisert når brukeren, via en enhet med DropBox installert, logger seg på et nettverk koplet opp mot internett. Det er også mulighet for pålogging direkte i en internettleser. Dette gir alle parter tilgang til oppdatert materiale, samt programvare for revisjonsvarsling, revisjonshistorikk og sikkerhetslagring. Alle agendaer og referater har blitt sendt både til veileder og oppdragsgiver til tross for at alle parter ikke har deltatt på de samme møtene. Dokumentasjon omtalt på møter, samt agenda og møtereferater er vedlagt i kapittel 13, henholdsvis vedlegg 2 og 3 for agenda og referat. Grunnet bruk av en rekke forkortelser og nøkkelord i sakslisten til både agenda og referater, men også for å forsikre at alle parter skulle tolke dokumentene korrekt, ble det utarbeidet en forklaring til agenda/ referat. Nevnte dokument finnes i vedlegg 7. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 9

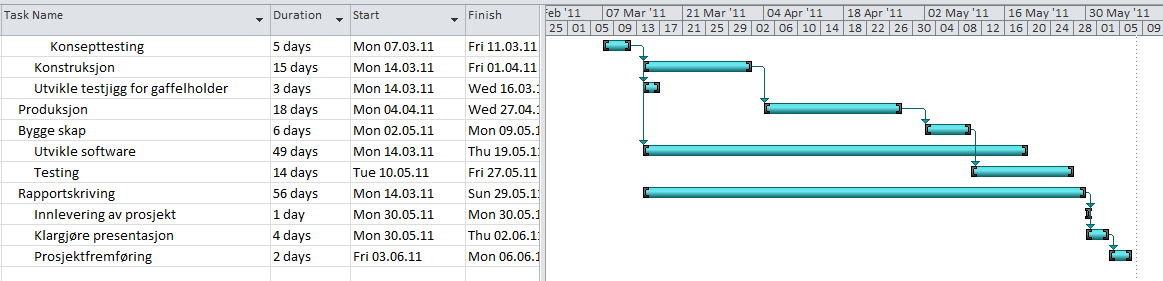
10 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Fremdriftsplan Fremdriftsplanen ble skjematisert i et Gantt-diagram (Figur 4-1). Dette gjør det enklere å følge tidsfrister og få med alle gjøremål. Gruppen laget også et Gantt-skjema som omfatter de viktigste punktene og gjøremål for hovedprosjektet (vedlegg 1). Figur 4-1: Gantt-skjema for miniprosjekt UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 10

11 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 5 Kravspesifikasjon Revisjon 2, revidert Harde krav: ISO-30 størrelse på verktøy (TMA 4/ 5 fresemodul) Støvbarriere o Automatisk og manuell aktivering o Ikke nødvendig med overtrykk o Beskytte mot større objekter som spon og lignende GUI Grafisk brukergrensesnitt Driftsikkert Mulighet for manuell verktøyskift ved for eksempel avbrutt syklus Myke krav: Verktøykalibrering i aksial retning o Maks tid pr. kalibreringssyklus 30 sek. o Valg av kalibreringsintervall, eks. hver 5, 10, 50 gang verktøyet kjøres. Plass til 30 verktøy RobotStudio simulering Enkel å betjene Implementerer trinnløs styring av spindelhastighet o Styres fra Rapid-kode o Overstyres manuelt via FlexPendant o Noen faste turtall, for eksempel 15000, som kan velges via FlexPendant Maks tid pr. verktøybyttesyklus 30 sek Automatisk rengjøring av verktøyets skjæreegg, eks. trykkluft. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 11
 Støvbarriere o Automatisk og manuell aktivering o Ikke nødvendig med overtrykk o Beskytte mot større objekter som spon og lignende GUI")
12 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 6 Beskrivelse av enheter relatert til prosjektet Dette kapittelet skal gi en kort presentasjon av grunnenhetene i prosjektet. Med dette menes enheter og elementer som vil ha en sentral plass i både utviklingen og gjennomføringen av prosjektet. Grunnet at enkelte elementer er meget omfattende så er en rekke detaljer bevist utelatt fra dette kapittelet. Utelatte detaljer anses å være av en slik betydning at mengden dokumentasjon som må fremlegges vil bli i en størrelsesorden langt over hva som vil være fornuftig å ta med i denne rapporten. Utelatt dokumentasjon, samt detaljopplysninger om samtlige enheter vil være å finne i kapittel 11, som inneholder litraturliste og referanser og kapittel 13 som inneholder vedlegg. 6.1 Robot og tilhørende elementer I hovedsak beskrives elementer og enheter tilknyttet aktuell robot hos Sørkomp, men grunnet gruppens ønske om bruk av UiA sin robot til testing, vil beskrivelsene gjøres på et nivå som omhandler begge de to aktuelle robotsystemene Robot Grunnet at Sørkomp, prosjektets oppdragsgiver innehar en ABB industrirobot, er det gitt at prosjektet vil bli utviklet rundt denne. Sørkomp har en 6- akse, gulvmontert robot tilhørende ABB sin IRB 6640 serie. Serien består av roboter med rekkevidde fra 2,55 m til 3,2 m og en løftekapasitet fra 130 kg til 235 kg. Aktuell modell hos Sørkomp har en rekkevidde på 3,2 m og løftekapasitet på 130 kg, se Figur 6-1. Siden gruppen ønsker å benytte UiA sin robot til testing, vil prosjektet også omfatte denne. Dette er en tilsvarende robot som overnevnte, men tilhører IRB 6600/ 6650 serien og har en rekkevidde på 2,55 m og en løftekapasitet på 175 kg. Programmeringsmessig vil det være liten forskjell på disse to robotene, når man ser bort fra forskjellen i rekkevidde. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 12

![Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato 18.02.11 Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Figur 6-1: IRB 6640. ([1] ABB, 2011) Figur 6-2: Arbeidsområde.](/docs-images/27/9549876/images/13-0.jpg "([1] ABB, 2011)")
.")
13 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Figur 6-1: IRB ([1] ABB, 2011) Figur 6-2: Arbeidsområde. ([1] ABB, 2011) Robotkontrollskap IRC5 Dette er selve hjerte i robotsystemet. Enheten behandler programdata fra FlexPendanten (kap ) eller via PC med RobotStudio Online (kap ). Enheten bruker den gitte informasjon i programmet til å kontrollere robotens bevegelser samt styring av inn- og utganger på eventuelle I/O moduler som er installert (omtalt i vedlegg 2, side 10 11). Gruppen vil benytte seg av muligheter for programmering og oppkopling til I/O moduler inne 1 i IRC5 skapet. Portene på I/O- modulen vil bli koplet opp mot fresemodul (kap ), frekvensomformer (kap ) og selve verktøyskapet (kap. 7.7). Funksjonsmessig vil I/O- modulen i grove trekk styre spindel 2, åpning/ lukking av verktøyskap, aktivering av verktøyrengjøring og signalisere robotens posisjon ved lengdemåling av verktøyet (kap. 8). Dette vil gi et system som kan betjenes direkte fra FlexPendanten, enten manuelt via egenutviklede menyer (kap ), eller via kode i Rapid program (kap ). Figur 6-3: IRC5 skap, med FlexPendant. ([2] ABB, 2011) 1 I/O- moduler kan også monteres utenfor IRC5 skapet. 2 Underforstått start/ stopp funksjon, valg av turtall og styring av automatisk verktøyskift. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 13
.")
14 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Styringsenhet - FlexPendant FlexPendant er en kontrollenhet som via et grafisk brukergrensesnitt lar operatøren betjene alle robotens funksjoner. FlexPendanten er utstyrt med en multifunksjonell trykksensitiv skjerm (touchskjerm), en rekke dedikerte 3 knapper, samt fire knapper som operatøren kan tilpasse/programmere etter eget ønske. Via FlexPendanten kan operatøren eksempelvis manuelt bevege alle robotens akser ( jogging ), programmere, utføre og redigere Rapid programmer (kap ). Grunnet ønske om GUI 4 (jfr. kap. 5) så vil gruppen benytte seg av mulighetene for å utarbeide egendefinerte menyer til FlexPendanten, dette kan gjøres på flere måter og omtales i kapittel Fresemodul Fresemodul, generelt sett i denne sammenheng, vil si en enhet som er fastmontert til robotens 6. akse. Denne enheten inneholder en elektrisk drevet spindel og har mulighet for feste av forskjellige frese- og boreverktøy som benyttes under sponfraskillende bearbeiding. Grunnet at dagens fresemodul ved Sørkomp ikke har mulighet for automatisk verktøyskift (ATC 5 ), ønsker Sørkomp å skifte ut den eksisterende enheten med en som har mulighet for ATC. På første møte gruppen hadde med Sørkomp var det usikkerhet rundt valget av ny fresemodul. Gruppen har utarbeidet et dokument (vedlegg 4) som inneholder informasjon om noen aktuelle modeller samt frembringer gruppens egne synspunkter for valg av fresemodul. Overnevnte dokument ble overlevert til Sørkomp og det ble i etterkant avklart at Sørkomp vil anskaffe en TMA4 (vedlegg 8) fra det Italienske selskapet ELTE S.R.L. Dette er samme enhet som i dag benyttes ved UiA. Enheten har en driftsspenning på V, hvor spindelturtallet reguleres ved hjelp av en frekvensomformer (kap ). Enheten er luftkjølt i form av påtrykket lufttilførsel. Enheten benytter seg av standard ISO-30, konisk innfestning for verktøyholdere. Innfestningen er utformet i den forstand at automatisk verktøy inn- og utspenning skjer ved hjelp av pneumatikk. Enheten har en rekke sensorer som Figur 6-4: TMA4 Fresemodul. ([3] ELTE S.R.L.) 3 Dedikerte til spesielle funksjoner. 4 Graphical user interface. 5 Automatic Tool Change - ATC UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 14
, programmere, utføre og redigere Rapid programmer (kap. 6.2.2). Grunnet ønske om GUI 4 (jfr. kap.")
15 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 overvåker funksjoner som drift og status for verktøyinn- og utspenning. For mer detaljerte data på aktuell enhet henvises det til vedlegg Frekvensomformer Produsenten av fresemodulen leverer i tillegg frekvensomformere av merket Vacon. Disse frekvensomformerne er testet opp mot ELTE S.R.L. sine produkter for å kunne gi maksimal ytelse. Fresemodul og frekvensomformer leveres som en pakkeløsning fra ELTE S.R.L. Aktuell modell for Sørkomp er Vacon NXS00095, som er identisk med den som er i bruk ved UiA. Enheten kan levere opp til 4 kw og kan programmeres/ styres på flere måter. Eksempelvis via dialog på avtakbart betjeningspanel, eller via egen pc-programvare gjennom RS-232 (EIA- 232) seriellport. Enheten har som standard to I/O kort som består av en rekke digitale, analoge og relé inn-/ utganger. Enheten har totalt plass til 5 slike I/O kort, så utvidelse av enheten er fult mulig. Figur 6-5: Vacon frekvensomformer. ([4] Vacon) Sørkomp ønsker trinnløs styring av spindelturtall (jfr. kap.5). Derfor vil gruppen benytte seg av analoge innganger på frekvensomformeren for å kunne styre turtallet trinnløst. Eksisterende system ved UiA i dag benytter en innebygd funksjon kalt Multi-step Speed Control ([5] Vacon, 2010). Denne funksjonen gir mulighet for å forhåndsdefinere 15+2 hastigheter som under drift velges ved å aktivere forskjellige bittmønster på 4 digitale innganger. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 15

16 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Utover turtallsstyring av spindel via frekvensomformer, så ønsker gruppen også å implementere en form for sikker stopp/ nødstopp som er koplet mot robotsystemets nødstopp. Om robotsystemet og frekvensomformer opererer som to separate system hvor eneste kommunikasjon er ordinær spindelstart/ stopp og valgt turtall, vil man kunne oppnå følgende senario: En uønsket hendelse i robotsystemet inntreffer, og operatør engasjerer nødstopp på robotsystemet. Roboten vil da stoppe sin opperasjon, men fresemodulen vil fremdeles være i drift fordi frekvensomformeren ikke har mottatt noen form for stoppsignal. Dette vil skape en stor risiko i en slik situasjon. Gruppen ønsker et komplett system hvor engasjement av en nødstopp stanser alle automatiske funksjoner som utøver en fare for personell og maskineri. 6.2 Programvare Beskrivelse av aktuell programvare som vil stå sentralt i prosjektet er beskrevet i påfølgende kapitler og gir en kort orientering om programmenes bruksområde og virkemåte. Grunnet at ingen av gruppens medlemmer går studieretningen Elektroniske styresystemer, så vil en stor del av dette prosjektet bestå av å tilegne seg kunnskap om noen av programvarene som benyttes i undervisningen til denne studieretningen RobotStudio RobotStudio (RS) er en programvare utviklet av ABB for programmering og verifisering av robotprogrammer. RS er utarbeidet for å være et fullverdig virtuell simulerings- og programmeringsverktøy. I RS kan man modellere, eller importere modeller og geometri til bruk ved programmering eller simulering. Se Figur 6-6 for programmeringsmiljø modellert av gruppen. Dette gir mulighet for å oppnå et simulerings-/ programmeringsmiljø som er meget realistisk 7. Under simulering og programmering i RS benyttes noe som ABB kaller en virtuell kontroller, dette er en kontroller som oppfører seg identisk med kontrolleren man vil finne på en reell robot. I RS finnes det også en virtuell FlexPendant (kap ), denne virker på nøyaktig samme måte som en fysisk enhet på et reelt system. Gruppen vil hovedsakelig benytte RS til programmering av RAPID-kode (kap ) og verifisering av RAPID-kode som er modifisert utenfor RS, samt verifisering av robotbevegelser, kontroll av rekevidde og generell simulering. Oppdragsgiver har også satt et krav om simulering i RS (jfr. kap. 5). 6 Hovedsakelig programvare og pensum som undervises i faget MAS216-G Industriell robotteknologi. 7 Forutsatt at modellene som benyttes, i stor grad samsvarer med den reelle verden. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 16

17 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Figur 6-6: Robotstudio brukergrensesnitt RAPID RAPID er et høynivå programmeringsspråk som i klartekst benytter en rekke engelske ord for å gjøre koden leselig for mennesker. RAPID-kode inneholder all informasjon som robotkontrolleren (kap ) behøver for å operere roboten, gitt at koden er korrekt. Enkle programmer som inneholder et begrenset antall bevegelser og operasjoner lar seg enkelt programmeres direkte som RAPID- kode, men ved for eksempel bruk av robot til maskinering så vil dette bli meget krevende. For slik programmering benyttes egen programvare for generering av RAPID- kode, i hovedsak på samme måte som man genererer nc- kode 8 til en CNC- maskin. En slik programvare benevnes ved DAP 9 og bruker et grafisk brukergrensesnitt til programmering av verktøybaner. Normen i dag er at man ofte benytter seg av 3d- modeller av ønsket produkt direkte inn i DAP- programmet, for så å legge verktøybaner direkte på denne modellen. DAP- programmet benytter informasjonen som innhentes under programmeringen til å generere nc- kode av ønsket format. Nc- koden inneholder all nødvendig informasjon om verktøybaner, verktøyvalg og skjærehastigheter 10. Denne koden vil videre benyttes direkte 8 Nc- kode er en generell benevnelse på programformater benyttet I CNC- maskiner. 9 Dataassistert produksjon, ofte også benevnt CAM, som er den engelske forkortelsen for computer-aided manufacturing. 10 Med dette menes parametere som spindelturtall og matingshastighet, dette er verdier som er avhengige av verktøytype og form, materialdata, bearbeidingsstrategi og hvordan emnet er fiksert. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 17

18 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 på en CNC- maskin, eller via en annen programvare før bruk på en robot. Eksempel på slik programvare er IRBCAM som er omtalt i kapittel RAPID programmering kan foregå direkte på FlexPendant (kap ), off- eller online i RobotStudio (kap ), som nevnt over via DAP, eller gjennom helt manuelle skriving av kode i et tekstbehandlingsprogram. Gruppen vil i stor grad benytte RobotStudio til programmering av RAPID- kode, samt modifisering av kode i tekstbehandlingsprogram ScreenMaker ScreenMaker (SM) har tideligere vært en frittstående programvare for utvikling av egendefinerte menyer til FlexPendant (kap ). Fra versjon 5.13 av RobotStudio (kap ) har SM blitt integrert som en egen modul i RobotStudio. ScreenMaker is a tool in RobotStudio for developing custom screens. It is used to create customized FlexPendant GUIs without the need to learn Visual Studio development environment and.net programming. Kilde: Application manual, ScreenMaker 5.12, side 7. ([6] ABB, 2009) Figur 6-7: Eksempel på meny laget i ScreenMaker. Gruppen vil, om det viser seg mulig, benytte SM til å lage egne menyer til aktuelle applikasjoner. Usikkerhet rundt lisenser og opsjoner på programvare hos oppdragsgiver vil avgjøre hvor vidt SM vil bli benyttet som verktøy for menyutvikling. Alternativt vil gruppen benytte RAPID (kap ) til utvikling av tekstbasert menysystem. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 18

19 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: IRBCAM Som omtalt i kapittel 6.2.2, er IRBCAM et verktøy som benytter seg av nc- kode for å generere RAPID programmet til ABB roboter. Dette leddet er nødvendig ettersom roboter oftest har flere akser enn en CNC- maskin, eksempelvis har Sørkomp sin robot ingen lineære akser, men 6 rotasjonsakser. En typisk CNC- fresemaskin er normalt bygget opp av tre lineærakser (X, Y, Z) og en til to rotasjonsakser. For at en robot skal kunne utføre en lineær bevegelse som går parallelt med systemets X- akse, så krever dette simultandrift av flere rotasjonsakser. I en typisk CNC- maskin så vil normalt en slik lineær bevegelse kun kreve bruk av en akse. Roboter har en fleksibilitet som overgår en ordinær CNC- maskin, og denne fleksibiliteten gjør at roboten vil ha flere mulige måter/ konfigurasjoner på å plassere seg med aktuelt verktøy i en gitt posisjon. Ved hjelp av dialoger i IRBCAM kan man enkelt overvåke og bestemme hvilke konfigurasjoner som ønskes ved utførelse av verktøybanene SolidWorks For utarbeiding av konsepter og 3d- modell av miljø til RobotStudio har gruppen benyttet SolidWorks. Dette er et DAK 11 program som gir brukeren muligheten til å utforme en virtuell 3d- modell av ønsket produkt, samt kjøre en rekke simuleringer som eksempel vis kontroll av funksjonalitet og styrke. Programvaren gir også muligheten for enkelt å generere arbeidstegninger 12 av gjeldende 3d-modell. SolidWorks blir benyttet i undervisning i fagene MAS127-G 3D-konstruksjon, modellering og analyse og MAS102 Maskindesign ved UiA. 11 Dataassistert konstruksjon, ofte benevnt CAD, som er den engelske forkortelsen for Computer Aided Design. 12 Med arbeidstegninger menes tegningsunderlag som gir en eventuell produsent all nødvendig dokumentasjon for å kunne produsere produktet. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 19

20 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 7 Produktutvikling Verktøyskap En vanlig måte å starte PU på er å ta utgangspunkt i kundeønsker, viderebehandle dem og komme frem til utvalgte kundebehov. I dette prosjektet har vi tatt utgangspunkt i harde og myke krav fra kravspesifikasjonen (jfr. kap.5) som er en mer direkte fremgangsmåte. Benchmarking av produktet som gruppen skal utvikle har liten nytte da det foreligger konkrete kravspesifikasjoner fra oppdragsgiver. Samtidig har gruppen ikke klart å oppdrive konkurrerende produkter som kan løse oppgavene som Sørkomp krever. Benchmarking vil ha en helt annen betydning når det skal utvikles et produkt som skal inn på et marked som er godt dekket av allerede eksisterende produkter. Skulle det være interesse for videre lesning av en mer detaljert PU kan tideligere hovedprosjekt ved UiA, Utvikling av system for automatisk verktøybytte på industrirobot ([7] UiA, 2009) anbefales. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 20


21 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Funksjonsløsningstre - Verktøyskap. Funksjonsløsningstreet viser hvilke oppgaver som produktet, i dette tilfellet verktøyskapet, skal løse. Treet viser fire hovedfunksjoner som en skapløsning skal ha, og forksjellige måter å løse disse på. Hvert konsept inneholder en kombinasjon av disse løsningene. Under beskrivelse av de ulike konseptene vil den aktuelle løsningskombinasjonen fremvises. F 2.1 Design L 1.1 Skyvelokk L 1.2 Heve/senkelokk F 2.2 Plassering av skap L 2.1 Vegg L 2.2 Gulv L 0.1 L 3.1 Skap Pneumatikk F 1 Oppbevaring av freseverktøy. L 0.2 Skuff F 2.3 Kraft/Styring L 3.2 Servo L 0.3 L 3.3 Eske Steppmotor L 4.1 F 2.4 Verktøyholder Hull L 4.2 Gaffelholder Figur 7-1: Funksjonsløsningstre UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 21
22 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Beskrivelse av konseptene Kort beskrivelse av konseptene med bilde, forklaring og kombinasjonsbeskrivelse. Kombinasjonsbeskrivelsen tolkes ved hjelp av funksjonsløsningstreet (Figur 7-1) Konsept 1 Veggmontert sylinderskap med sirkulært skyvedeksel. Skapet benytter gaffelholdere 13 til verktøyene. Verktøyene står i 3 nivåer. Dekslet roteres 180⁰ fra lukket til åpnet posisjon. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-2: Konsept 1 Figur 7-3: Kombinasjonsbeskrivelse for konsept 1 13 Gaffelholder er en enhet med to fingre som griper rundt verktøyets flens. Denne flensen har et v-spor som er designet for å holde verktøyet under verktøyskift eller ved oppbevaring. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 22


23 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 2 Skapet er gulvmontert med rullegardin- deksel. Det inneholder både runde hull i plate og gaffelholder til verktøyene. Verktøyene blir plassert i 2 rader på hvert sitt nivå. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-4: Konsept 2 Figur 7-5: Kombinasjonsbeskrivelse for konsept 2 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 23

24 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 3 Kompakt veggmontert skap med gaffelholdere på tre rader og tre nivåer. Utstyrt med rullegardin -deksel. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-6: Konsept 3 Figur 7-7: Kombinasjonsbeskrivelse for konsept 3 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 24
25 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 4 Veggmontert skap med mange likhetstrekk til konsept 3, tre rader og tre nivåer. Skilnaden ligger i verktøyholderne. Disse er sirkulære hull i plate med festesone i nedre del med mindre radius. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-8: Konsept 4 Figur 7-9: Kombinasjonsbeskrivelse for konsept 4 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 25
26 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 5 Enkelt veggmontert skap med runde hull på plate for oppbevaring av verktøy. To rader med verktøy på ett nivå. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-10: Konsept 5 Figur 7-11: Kombinasjonsbeskrivelse for konsept 5 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 26

27 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 6 Kabinettet har heve-/senkedeksel og er veggmontert. Verktøyene plasseres i gaffelholder og sirkulært hull. Vertøyene står på to radier i to nivåer. Gaffelholderne (gule detaljer på Figur 7-12) monteres på hovedplaten, dette vil gi en form for modularitet i systemet. Med dette menes at man med relativt enkle grep kan bytte ut en gaffellomme med en ordinær rund lomme om det skulle være ønskelig. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-12: Konsept 6 Figur 7-13: Kombinasjonsbeskrivelse for konsept 6 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 27

28 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 7 Vertøyene lagres i gaffelholdere i to rader og 2 nivåer. Skapet er veggmontert. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-14: Konsept Figur 7-15: Kombinasjonsbeskrivelse for konsept 7 14 Figur viser verktøy montert på ett nivå, grunnet geografiske begrensinger så vil en slik konfigurasjon skape konflikt mellom fresemodul og verktøyholdere. Dette er gruppen klar over, men figuren er ikke endret grunnet at dette vil være en relativt liten endring i konseptets design. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 28

29 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 8 Skapet er veggmontert med to dører som åpnes/lukkes. Verktøyholderne er av gaffeltype og montert i to vertikale rader. Servomotor eller pneumatisk aktuator vil benyttes for å åpne/ lukke skapet. Figur 7-16: Konsept 8 Figur 7-17: Kombinasjonsbeskrivelse for konsept 8 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 29
30 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 9 Kuka RMC-60-S er et tyskprodusert verktøyskap som også kan implementeres med kalibrering. Skapet har kun plass til ti verktøy. Vi har valgt å ta med skapet som referanseprodukt i PU prosessen. Figur 7-18: Konsept 9 Figur 7-19: Kombinasjonsbeskrivelse for konsept 9 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 30
31 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Grovsiling verktøyskap. Gruppen arbeidet individuelt i idé-myldringsfasen og lagde flere utkast på skisser. Totalt åtte konsepter ble fremlagt som SolidWorks modeller. Det ble også foretatt kildesøk der produktutviklingsprosessen til et tidligere prosjekt fra 2009 ([7] UiA, 2009) ble tatt med som næring til idémyldringen. Sammen gikk gruppen gjennom disse åtte konseptene og valgte ut fire som gikk videre til grundigere vurdering. Konsept 2: Vegg/gulv-montert skatoll med rulledeksel. Skapet har plass til 30 verktøy og har lengdekalibrering. Lokket er etter rullegardinprinsippet. Konseptet gikk ikke videre grunnet at det vil ta stor plass. Konsept 4: Veggmontert trapesformet skap med hengslet deksel. Samme som konsept 3 men med hengslet heve/ senke-dør. Gikk ikke videre av denne grunn og fordi dekslet vil hindre operatørens sikt i større grad enn konsept 3. Konsept 5: Hylleskap med heve/ senke-deksel. Plass til 30 verktøy, lengdekalibrering og kan avlastes med gulvsupport. Vertøyene lagres på ett nivå. Gikk ikke videre siden den er veldig lik på konsept nr. 6. Konsept 8: Vertikalt rack med todelt deksel. Vegg og gulvmontert rack med plass til 30 verktøy og lengdekalibrering. Gikk ikke videre fordi den var ugunstig med tanke på å implementere ulike verktøyholdere. Konseptene 1, 3, 6 og 7 gikk videre til konsept screening. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 31
32 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept screening De fire konseptene som gruppen valgte å gå videre med i utviklingen ble satt opp i tabell (Tabell 1) for vurdering. Som referanse valgte vi et eksisterende skap på markedet, Kuka RMC-60-S (kap ). Seleksjonskriterier Konsept 1 Veggmontert sylinderskap med roterende deksel Konsept 3 Veggmontert trapesformet skap med rulledeksel Konsept 6 Veggmontert langskap med heve/ senkedeksel Konsept 7 Veggmontert rack med heve/ skyvedeksel Brukervennlig Plasseringsvennlig Driftsikkert Lengdekalibrering Effektivt Støvbarriere Kapasitet Plusser er Minuser Sum Rangering Videre Ja Ja Ja Ja Tabell 1: Konsept screening Seleksjonskriteriene er tatt fra harde og myke spesifikasjoner som ble utarbeidet under møte med Sørkomp og veileder (jfr. kap. 5). Referanse Kuka RMC- 60-S Hvert konsept ble vurdert ut fra referansen og gitt pluss, null eller minus i karakter. Til slutt ble graderingen summert, noe som gav svar på hvilke konsepter som skulle gå videre. Gruppen valgte å la alle konseptene gå videre da summene var relativt like. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 32
33 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept scoring Konsept 1 Veggmontert sylinderskap med roterende deksel Poeng Vektet poeng Konsept 3 Veggmontert trapesformet skap med rulledeksel Poeng Vektet poeng Konsept 6 Veggmontert langskap med heve/ senkedeksel Poeng Vektet poeng Konsept 7 Veggmontert rack med heve/ skyve-deksel Seleksjonskriterier Vekting [%] Poeng Vektet poeng Brukervennlig ,80 3 0,60 4 0,80 3 0,60 Plasserings ,20 3 0,15 4 0,20 4 0,20 vennlig Driftsikkert ,80 4 0,80 5 1,00 5 1,00 Lengde ,00 5 1,00 5 1,00 5 1,00 kalibrering Effektivt ,45 4 0,60 4 0,60 3 0,45 Støv-barriere ,60 3 0,45 3 0,45 4 0,60 Kapasitet 5 4 0,20 5 0,25 5 0,25 5 0,25 Sum 100 4,05 3,85 4,30 4,10 Rangering Videre Nei Nei Ja Nei Tabell 2: Konsept scoring De ulike kriteriene er vektet ut i fra viktighet. Vektingen er i prosent. Poengene er gradert i fra 1 til 5 hvor 5 er best oppfylt kriterium. Vektet poeng er graderingsverdien multiplisert med kriteriets vektingsverdi. De vektede poengene blir summert og konseptet med høyeste sum vil bli valgt til videre utvikling. Konsept nr. 6 fikk høyeste poengsum og vil bli videreutviklet. 7.6 Konsepttesting Grunnet ferieavvikling hos ekstern veileder i kombinasjon med tidsrammen rundt miniprosjektet, så har gruppen bestemt at konsepttesting i dialog med oppdragsgiver vil bli gjort i starten av kommende hovedprosjekt. For ikke å stoppe opp i videre arbeid, besluttet gruppen å gå videre i prosessen med å velge konsept. Revidering av dette arbeidet vil bli gjort ved et senere tidspunkt om det skulle vise seg nødvendig. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 33
34 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Beskrivelse av valgt konsept Generelt Gruppen har valgt å gå videre med konsept nr. 6, veggmontert langskap med heve/senkedeksel. Verktøyene blir plassert på to rader og to nivå. Den fremste raden vil ha laveste nivå og benytte gaffelholdere 15, bakre rad vil ha sirkulære hull for feste av verktøy. Kalibreringsenheten vil bli implementert på innsiden av skapet slik at denne står i et beskyttet miljø. Rengjøringsenheten vil bli plassert på yttersiden av skapet, grunnet at det anses som best at skapet er lukket under rengjøringsprosessen. Figur 7-20: Oversikt, konsept 6 Gaffelholderne vil bli montert på hovedplaten (Figur 7-20). Dette vil gi systemet en form for modularitet. Med dette menes at man med enkle grep kan bytte ut en gaffelholder til en holder med rundt hull. Dette krever selvsagt at man i tillegg til gaffelholderne lager holdere med runde hull som har samme innfestning som gaffelholderne. Gruppen ser på dette som en fordel, ettersom man da vil få et meget fleksibelt system. Om det viser seg mulig og funksjonelt, ønsker gruppen å produsere lokket og sideveggene i komposittmateriale fra Sørkomp. Dette vil gi skapet en konkret tilhørighet til bedriften, samt at det er spennende, sterke og lette materialer. 15 Gaffelholder er en enhet med to fingre som griper rundt verktøyets flens. Denne flensen har et v-spor som er designet for å holde verktøyet under verktøyskift eller ved oppbevaring. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 34
35 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Gaffelholder versus sylindrisk hull Gaffelholder vil være en praktisk løsning som gir mulighet for oppbevaring av verktøy 16 som har større diameter enn selve verktøyholderen 17. Det åpner også opp muligheten for bruk av verktøyholdere som har annen innfestning til selve freseverktøyet. Om det benyttes runde hull, så er man låst til å benytte verktøyholdere som har en dimensjon som samsvarer med hullet i verktøyskapet. Ulempen med gaffelholder er at man her er avhengig av at verktøyholderen løses korrekt ut av fresemodulen. Om verktøyholderen blir sittende fast i fresemodulen så vil dette kunne føre til skade på verktøyskap og mulig fresemodul/ robot. Fresemodulen registrerer om det sitter verktøy i spindelen eller ikke, men dette signalet endrer kun tilstand når verktøyholderen fysisk er ute av fresemodulen. Grunnet bevegelsesmønsteret (Figur 7-21) som kreves for verktøybytte når det benyttes gaffelholdere, vil overnevnte signal ikke være til hjelp. Dette fordi at verktøyholderen fremdeles vil være inne i fresemodulen samtidig som verktøyholderen er festet i gaffelholderen. I denne situasjonen må det kjøres en lineærbevegelse parallelt med verktøyaksen for å frigjøre fresemodulen (se rute nummer 3 i Figur 7-21). Figur 7-21: Bevegelsesmønster ved verktøyskift Figur 7-21 viser de tre hovedposisjonene ved verktøyskift i et system som benytter gaffelholder som festemetode. For å avlevere et verktøy må roboten posisjonere seg som på rute nummer 1, deretter kjøres en lineær bevegelse inn i gaffelholderen slik at man ender opp som i rute nummer 2. Når roboten har nådd posisjonen som samsvarer med rute nummer 2 må verktøyholderen løses ut av fresemodulen. Deretter kjøres en lineær bevegelse parallelt med verktøyaksen opp over verktøyholderen, som illustrert i rute nummer 3 på Figur For å hente et verktøy må prosessen forklart over reverseres. 16 I denne sammenheng selve fresebittet, verktøyet som benyttes til den faktiske sponfraskillingen. 17 ISO-30 grunnholder UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 35
36 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Problematikken kan løses på flere måter. Man kan ha en dedikert teststasjon hvor man gjør en test og sjekker om verktøyet løser ut før man utførere plasseringen av verktøyet. Det er også mulighet for å få roboten til å føle på hvor mye kraft som brukes, for så å stoppe dersom man overstiger en fastsatt verdi. Dette gjøres ved bruk at en funksjon som kalles Motion Supervision. Detaljert informasjon finnes i vedlegg 11, som er et utdrag fra hjelpfunksjonen i RobotStudio. Førstnevnte metode vil kreve ekstra plass, samt øke syklustiden ved verktøyskift betraktelig. Metode to er klart den mest elegante, men krever kalibrering av aktuelle parametere samt en del testing for å fungere skikkelig. Uavhengig av hva som velges, så må feil under syklusen detekteres, syklusen stoppes, og alarm til operatør skrives på flexpendanten Montering Skapet vil i hovedsak monteres til vegg, men om nødvendig 18 vil det enkelt kunne tilføyes gulvfester. Skapet vil bli montert litt ut fra veggen for å gjøre plass til åpning av lokket (Figur 7-22). Et alternativt til dette vil være tett inntil vegg. I så tilfelle må åpne/ lukke mekanismen til lokket endres i den retningen slik at det i åpen posisjon krever betraktelig mindre plass enn antydet på Figur Ved montering ut fra vegg vil dette gi rom i bakkant av skapet for montering av åpne-/lukke-mekanisme av luke, samt plassering av elektroniske og eventuelle pneumatiske koplinger. Figur 7-22: Montering Åpne/lukke-mekanisme Åpning av lokket slik det er fremstilt i konseptskissene vil kreve en rotasjon på 114 fra lukket til åpen posisjon. Dette med tanke på at fresemodulen uten hinder skal kunne posisjonere seg over alle verktøyholderne. En slik bevegelse kan oppnås både med pneumatisk aktuator eller en servomotor. Pneumatisk aktuator vil bidra til en enkel og hurtig bevegelse ettersom man her benytter seg av elementets fysiske begrensinger, nemlig maksimum og minimum slaglengde av sylinderen. Eventuelt er det mulig å implementere fysiske endestoppere for bevegelsen direkte i skapets konstruksjon. En annen fordel med pneumatisk aktuator er at om noe skulle sette seg fast eller stoppe, så vil ikke dette føre til skade på selve aktuatoren. 18 Om for eksempel aktuell vegg hos Sørkomp ikke har tilfredsstillende stivhet. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 36
37 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Bruk av servomotor til bevegelsen vil kunne løses på en rekke måter. Det finnes mange muligheter ved å konvertere motorens rotasjonsbevegelse til en lineær bevegelse. Man ender da opp med en elektrisk lineær aktuator. Denne vil kunne benyttes i hovedsak på samme måte som en pneumatisk aktuator, dog stiller denne høyere krav til styring av energitilførsel. Det er selvsagt også mulig å benytte motorens rotasjonsbevegelse direkte til åpning og lukking av lokket. Dette kan virke ideelt ettersom ønsket bevegelse er en rotasjon. Men en direkte bruk av motorens rotasjonsbevegelse setter høye krav til valg av motor, kopling mellom motor og lokk, samt styring av energitilførsel. En mulig løsning på deler av dette vil være å implementere et gir i systemet. Konkret løsning på problemstillingen som omhandler åpning og lukking av lokket vil utarbeides i gruppens hovedprosjekt. Løsningen vil være avhengig av en rekke parametere som for eksempel utforming og vekt av lokk. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 37
38 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 8 Produktutvikling Lengdekalibrering 8.1 Funksjonsløsningstre Funksjonsløsningstreet beskriver systematisk de forskjellige løsninger de enkelte konseptene innehar. Alle konseptene vil inneholde ett eller flere elementer fra hvert område. Hvilke elementer er avgjort av konseptets konfigurasjon og virkemåte. F2.1 Design L1.1 Lukket system L1.2 Åpent system F1 Lengdemåling av verktøy L0.1 Manuell L0.2 Automatisk F2.2 Kontakt fri F2.3 Mekanisk kontakt L2.1 Laser L3.1 Lineær L3.2 Rotasjon L4.1 Optisk F2.4 Signal generering L4.2 Mikrobryter L4.3 Strømførende system Figur 8-1: Funksjonsløsningstre UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 38
39 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Beskrivelse av konsepter Kort beskrivelse av konseptene med bilde, forklaring og kombinasjonsbeskrivelse. Kombinasjonsbeskrivelsen tolkes ved hjelp av funksjonsløsningstreet (Figur 8-1) Konsept 1 System fremlagt av Sørkomp, Heidenhain Lasersystem TL. Dette er et kommersielt system som er utviklet for industrielle cnc-maskiner. For utvidet informasjon til systemet henvises det til vedlegg 5 side tre, samt dokumentet Touch Probes for Machine Tools ([8] HEIDENHAIN GmbH, 2010). Figur 8-2: TL Laser, ([8] HEIDENHAIN GmbH, 2010) Figur 8-3: Kombinasjonsbeskrivelse for konsept Konsept 2 Heidenhain TT Touch Probes for Tool Measurement, også et kommersielt system utviklet for industrielle cnc-maskiner. For utvidet informasjon til systemet henvises det til vedlegg 5 side fire, samt dokumentet Touch Probes for Machine Tools ([8] HEIDENHAIN GmbH, 2010). Figur 8-4: TT Touch Probe, ([8] HEIDENHAIN GmbH, 2010) UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 39


40 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Figur 8-5: Kombinasjonsbeskrivelse for konsept Konsept 3 Egenutviklet system. Lineært en-akset system hvor en mikrobryter aktiveres ved at en sleide med markant tverrsnittsendring engasjerer mikrobryterens fjærbelastede kontaktpunkt. Mikrobryteren vil da endre tilstand, og denne tilstandsendringen vil benyttes til å bestemme robotens posisjon, slik at verktøylengden kan beregnes. Figur 8-6: Lineær, fjærbelastet stylus, mikrobryter Figur 8-7: Kombinasjonsbeskrivelse for konsept Konsept 4 Samme utforming som konsept 3, men uten bruk av mikrobryter til signalgenerering. Hele systemet gjøres strømførende og koples sammen med roboten. Dette resulterer i en åpen krets, men ved kontakt av verktøy på stylus/ sleide (Figur 8-6) så vil kretsen lukke. Man vil da kunne benytte denne kretsen til å generere signal til roboten. Figur 8-8: Kombinasjonsbeskrivelse for konsept 4 UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 40
41 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konsept 5 I hovedsak samme utforming som konsept 3 og 4, men det benyttes en lesegaffel 19 for generering av signal. På enden av stylus/ sleide monteres en blender(figur 8-9). Når stylus/ sleide beveger seg (grunnet kontakt med verktøy) vil blenderen blokkere lysstrålen i lesegaffelen. Dette vil gi endringer i signalet ut fra lesegaffelen, og denne endringen vil benyttes til å bestemme robotens posisjon slik at verktøylengden kan beregnes. Figur 8-9: Lineær, fjærbelastet stylus, lesegaffel Figur 8-10: Kombinasjonsbeskrivelse for konsept Valg av konsept Generelt Gruppen har valgt og ikke kjøre full produktutvikling på verktøykalibreringsenheten. Dette på tross av at det selvsagt finnes mange måter å løse det aktuelle problemet på. En produktutviklingsfase er en systematisk fremgangsmåte for å fremme det mest egnede konseptet/ produktet, samt gi en oversikt over kundens behov opp mot valgte konsepter. Gruppen har tatt for seg det som er mest utbredt i industrien i dag. Systemene er blitt satt opp mot hverandre med tanke på funksjonalitet, nøyaktighet, pris, og hvor enkelt de lar seg implementere inn i det aktuelle system. 19 Photo interrupter (engelsk), optisk enhet som består av en lyskilde og en lysdetektor montert i en innkapsling hvor kilde og detektor er separert av et åpent område (spalte). Over dette området vil det under drift være en lysstråle som detekteres av detektoren, ved brudd på denne strålen vil spenningen ut fra detektoren endre seg. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 41
42 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: I industrien i dag Grunnet at maskinering med CNC 20 - maskiner er betraktelig mer utbredt enn maskinering med industrirobot, samt at en av gruppens medlemmer har flere års erfaring innen CNCmaskinering, har gruppen valgt å se på systemer som i dag benyttes i CNC industrien. Prinsippmessig så vil man kunne benytte samme type systemer, ettersom man ønsker å finne lengden til verktøyet ut fra et referansemål/ punkt som er kjent for roboten eller CNC- maskinen. Et system som er meget utbredt i maskineringsindustrien i dag er en eller annen form for forhåndsinnstilling. Med dette menes systemer hvor verktøymålingen skjer i en separat frittstående enhet (Figur 8-11) som har samme type innfesting som produksjonsenheten 21. Dette gjør det mulig å sette opp nødvendig verktøy, måle verktøydata og klargjøre verktøy for Figur 8-11: EZset verktøymåler, ([9] EZset) produksjon uten at det går utover maskineringstiden. Verktøydata overføres så til produksjonsenheten, enten manuelt eller automatisk ved hjelp av dataoverføring. Ulempen med slike systemer er at dersom man under produksjon ønsker å sjekke/ kalibrere verktøyet, så må produksjonen stoppes og verktøyet fjernes fra produksjonsenheten, før det sjekkes. Dette er altså en prosess som ikke kan foregå ubemannet. En annen ulempe er at man her ikke har mulighet for å benytte produksjonsenheten til innjustering av systemet, men er avhenging av et verktøy med kjente verdier for å få satt opp systemet korrekt. På den andre siden så har et slikt system en rekke funksjoner utover lengde- og diametermåling av verktøy. Typiske funksjoner kan være: Mål av kast/ koaksialitet Vinkelmåling Profilmåling Verktøydatabaser Visuell kontroll av skjæreegg Ut over forhåndsinnstillingssystemer som nevnt over, så benyttes det andre mer automatiserte og integrerte systemer, ofte som et supplement til forhåndsinnstillingen. 20 Computer Numerical Control 21 I denne sammenheng en industrirobot eller CNC- maskin UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 42
43 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Dette gjør at man vil kunne benytte seg av muligheten for å klargjøre verktøy uten produksjonsstans, samt under produksjon benytte seg av automatisk, ubemannet kontroll av verktøy. Automatiske/integrerte systemer er oftest spesiallaget til enkelte styringssystemer, eller har en ekstern enhet med tilpassningselektronikk/ software som er tilpasset det aktuelle styringssystemet. Denne softwaren inkluderer typisk en rekke forhånds definerte makroer eller sykluser som benyttes for kontroll og måling av verktøy. De mest vanlige systemene er omtalt i et eget dokument som gruppen utarbeidet for å fremlegge informasjon og synspunkter til Sørkomp angående problemstillingen. Dokumentet er tatt med som vedlegg (vedlegg 5) Grunnlag for valg Sørkomp ønsker et automatisk system for lengdemåling av verktøy. Derfor vil naturlig nok alle former for forhåndsinnstilling falle bort som et alternativ. Om det i senere tid skulle være ønske om en enhet for forhåndsinnstilling, vil det bli en enkel sak ettersom dette er en frittstående enhet som installeres isolert fra andre systemer. På grunnlag av informasjon, betraktninger og synspunkter fremmet i overnevnte dokument (vedlegg 5) så har gruppen anbefalt Sørkomp til å la gruppen utvikle en egen enhet for lengdemåling av verktøy. I møte med Sørkomp ( ) ble det avklart at dette var ønskelig også fra deres side. På grunnlag av avklaringer i overnevnte møte, vil gruppen ikke legge ned mye arbeid i å dokumentere de kommersielle eksisterende systemer. Dette medfører at videre i utviklingen vil konsept nummer 3, 4 og 5 videreføres og dokumenteres mer utdypende. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 43
44 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Konseptrangering Ettersom gruppen har valgt å ikke gjennomføre en fullverdig produktutviklingsprosess angående kalibreringsenheten, blir en rekke av produktutviklingselementene utelatt. Det er likevel viktig å få frem hvordan de aktuelle konseptene løser problemstillingen, samt vekte de forksjellige konseptene opp mot hverandre på en systematisk måte. I denne sammenheng er det utført en konseptrangering hvor konseptenes hovedelementer rangeres. Rangeringen går fra 1 til 5, hvor 1 er dårligst og 5 er best. Element Konsept 1 Konsept 2 Konsept 3 Konsept 4 Konsept 5 Pris 1 1,5 4,5 5 4,5 Nøyaktighet 22 2,5 2, Driftssikkert Enkelhet Utnyttelse Sum 10, , ,5 Tabell 3: Konseptrangering Som det kan leses ut fra Tabell 3 så skiller konsept 1 og 2 seg negativt ut. Ettersom konsept 3, 4 og 5 er meget like så scorer disse ikke overraskende ganske likt. For nærmere beskrivelse av konsepter og virkemåte henvises det til vedlegg 6, samt kapittel Valg På bakgrunn av konseptrangering, samtaler med veileder og gruppens egne argumenter så er det bestemt at konsept nummer 5 vil videreføres til hovedprosjektet. 22 Konsept 1 og 2 scorer lavt her grunnet for høy nøyaktighet og presisjon med tanke på den aktuelle oppgaven. 23 Med tanke på implementering i aktuelt system. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 44
45 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: Veien videre Gruppen har som nevnt satt seg som mål i miniprosjektet å frembringe et konsept som er klart for detaljdesign og videre raffinering i hovedprosjektet. Gruppen har bevist valgt å separere utviklingen av selve verktøyskapet og kalibreringsenheten. Dette begrunnes med at gruppen ønsker at kalibreringsenheten, i tillegg til implementering i system hos Sørkomp, også skal kunne være et frittstående system som enkelt lar seg implementere andre steder. For eksempel ved UiA sin robotlab. Det valgte konseptet som er beskrevet i overnevnte tekst og nevnte vedlegg vil i gruppens hovedprosjekt gjennomgå en detaljert design-/konstruksjonsprosess. I denne prosessen vil tekniske løsninger og problemstillinger løses og utvikles på detaljnivå, men prinsippene vil bygge på det valgte konseptet. Eksempler på videre utvikling kan for eksempel innebære områder som: Signalstøy Friksjon i system Repeterbarhet Fukt/støv beskyttelse Valg av elektriske komponenter Materialvalg Osv.. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 45
46 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 9 Verktøyrengjøring Jfr. kapittel 5, så skal det i systemet finnes en mulighet for rengjøring av verktøy. Med dette menes en enhet som har som funksjon å fjerne fremmedlegemer som spon, støv og smuss fra freseverktøyet. En slik enhet vil begrense mulighetene for feil 24 ved lengdemåling av verktøy, samt bidra til å holde den innvendige delen av verktøyskapet ren. Visuell kontroll av skjæreegg på freseverktøy vil også bli enklere ettersom man heletiden vil ha forholdsvis rene verktøy stående i verktøyskapet. Gruppen har valgt å utelate verktøyrengjøring fra produktutviklingsfasene. Dette fordi at denne funksjonen anses som meget enkel å implementere på et hvilket som helst system. I korte trekk vil en enhet for verktøyrengjøring bestå av et dedikert område med en eller flere trykkluftsdyser. Dysen(e) vil aktiveres ved hjelp av pneumatiske ventiler som styres av digitale utganger på roboten. Rengjøring av verktøy ved hjelp av trykkluft er meget vanlig, og man finner dette integrert i en rekke kommersielle CNC- maskiner og verktøykalibreringsenheter, eksempelvis system omtalt i vedlegg 5, side 3. En enhet for verktøyrengjøring vil bli montert på yttersiden av verktøyskapet, fordi at rengjøring av verktøy bør foregå med verktøyskapet lukket. Dette for å unngå risikoen for at fremmedlegemer som fjernes fra verktøyet havner inni verktøyskapet. 24 Feil vil kunne oppstå ved lengdemåling om for eksempel spon eller andre fremmedlegemer befinner seg i en slik posisjon at verktøyets lengde fremstår som lengre en hva det faktisk er. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 46
47 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 10 Fra miniprosjekt til hovedprosjekt Som nevnt i rapportens innledning så har gruppen satt seg som mål at miniprosjektet skal være et fundament for hovedprosjektet. Med dette som grunnlag vil det falle naturlig at gruppen i denne rapporten også informerer om tanker og synspunkt på overgangen mellom miniprosjekt og hovedprosjekt. Miniprosjektet har resultert i godt dokumenterte konsepter som vil være et godt verktøy for videre bearbeiding i hovedprosjektet. Videre i hovedprosjektet vil en sammenslåing av mekaniske komponenter som verktøyskap (kap. 7.7), lengdekalibreringsenhet (kap ) og verktøyrengjøring (kap. 9) til ett system planlegges, utføres og dokumenters. Dette innebærer naturlig nok også prosessen rundt utvikling og produksjon av nevnte komponenter. Videre så vil det mekaniske systemet bli knyttet opp mot nødvendig utstyr og komponenter for å kunne utfylle de gitte krav (kap. 5). Igjen innebærer dette at det mekaniske systemet sømløst skal virke sammen med robot (kap ), frekvensomformer (kap ), FlexPendant (kap ), fresemodul (kap ), lengdekalibreringsenhet og verktøyrengjøringsenhet. Sømløst i den forstand at det komplette system vil ha en funksjon som tilfredsstiller de krav som er gitt av oppdragsiver. Gruppen har satt opp en Gantt- skjema (vedlegg 1) som omhandler de største gjøremålene for hovedprosjektet. Dette vil naturlig nok revideres ved oppstart av hovedprosjektet, men det vil likevel gi en pekepinn på hvilke utfordringer gruppen vil møte. Slik gruppen ser det fra eget ståsted i skrivende stund, så vil den største utfordringen i kommende hovedprosjekt være programmering av systemet. I dette ligger programmering av frekvensomformer, robot og menyer for FlexPendant. Utfordringen ligger i å lage et system som er enkelt å betjene, lett å modifisere, funksjonelt og oversiktlig. Gruppen ser frem til hovedprosjektet som en spennende og lærerik periode. UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 47
48 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 11 Litteraturliste og referanser [1] ABB. (2011). Produktoversikt - Roboter - Robots - IRB Datablad. Hentet 18. Februar 2011 fra d6/$file/rob0001en_e.pdf [2] ABB. (2011). Produktoversikt - Roboter - Controllers - IRC5 - Datablad. Hentet fra e0eb/$file/irc5%20datasheet%20pr10258%20en_r12.pdf [3] ELTE S.R.L. (u.d.). Products - TMA Automatic Tool Changer Series - Compr. Air Cooled - TMA4 ISO20/30. Hentet 18. Februar 2011 fra [4] Vacon. (u.d.). Produktinformation - Vacon NXS. Hentet 18. Februar 2011 fra &name=bc00165c [5] Vacon. (2010). Product information - NX All in One Application Manual. Hentet 18. Februar 2011 fra [6] ABB. (2009). Products & services - Downloads - Application manual ScreenMaker Hentet 18. Februar 2011 fra 003a6228/$file/application_manual_screenmaker.pdf [7] UiA. (2009). Utvikling av system for automatisk verktøybytte på industrirobot. Grimstad: P. Ankersen, G. Kragseth, J. A. Willumsen og G. E. Grødem - Universitetet i Agder. [8] HEIDENHAIN GmbH. (2010). Produkter og applikasjoner - Innstilling og oppmåling - Touchprober. Hentet 18. Februar 2011 fra [9] EZset. (u.d.). Products - ImageController2. Hentet 10. Februar 2011 fra UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 48
49 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 12 Figurliste Figur 4-1: Gantt-skjema for miniprosjekt Figur 6-1: IRB ([1] ABB, 2011) Figur 6-2: Arbeidsområde. ([1] ABB, 2011) Figur 6-3: IRC5 skap, med FlexPendant. ([2] ABB, 2011) Figur 6-4: TMA4 Fresemodul. ([3] ELTE S.R.L.) Figur 6-5: Vacon frekvensomformer. ([4] Vacon) Figur 6-6: Robotstudio brukergrensesnitt Figur 6-7: Eksempel på meny laget i ScreenMaker Figur 7-1: Funksjonsløsningstre Figur 7-2: Konsept Figur 7-3: Kombinasjonsbeskrivelse for konsept Figur 7-4: Konsept Figur 7-5: Kombinasjonsbeskrivelse for konsept Figur 7-6: Konsept Figur 7-7: Kombinasjonsbeskrivelse for konsept Figur 7-8: Konsept Figur 7-9: Kombinasjonsbeskrivelse for konsept Figur 7-10: Konsept Figur 7-11: Kombinasjonsbeskrivelse for konsept Figur 7-12: Konsept Figur 7-13: Kombinasjonsbeskrivelse for konsept Figur 7-14: Konsept Figur 7-15: Kombinasjonsbeskrivelse for konsept Figur 7-16: Konsept Figur 7-17: Kombinasjonsbeskrivelse for konsept Figur 7-18: Konsept Figur 7-19: Kombinasjonsbeskrivelse for konsept Figur 7-20: Oversikt, konsept Figur 7-21: Bevegelsesmønster ved verktøyskift Figur 7-22: Montering Figur 8-1: Funksjonsløsningstre Figur 8-3: Kombinasjonsbeskrivelse for konsept Figur 8-2: TL Laser, ([8] HEIDENHAIN GmbH, 2010) Figur 8-4: TT Touch Probe, ([8] HEIDENHAIN GmbH, 2010) Figur 8-5: Kombinasjonsbeskrivelse for konsept Figur 8-7: Kombinasjonsbeskrivelse for konsept UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 49
50 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 Figur 8-8: Kombinasjonsbeskrivelse for konsept Figur 8-6: Lineær, fjærbelastet stylus, mikrobryter Figur 8-10: Kombinasjonsbeskrivelse for konsept Figur 8-9: Lineær, fjærbelastet stylus, lesegaffel Figur 8-11: EZset verktøymåler, ([9] EZset) UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 50
51 Fag Oppgave MAS200 Miniprosjekt Universitetet i Agder 2011 Dato Bachelorprogram, mekatronikk Gruppe Nummer 13 Revisjon nr: 1 13 Vedlegg Vedlegg 1 - Vedlegg 2 - Vedlegg 3 - Vedlegg 4 - Vedlegg 5 - Vedlegg 6 - Vedlegg 7 - Vedlegg 8 - Vedlegg 9 - Vedlegg 10 - Vedlegg 11 - Gantt- diagram for hovedprosjekt Agenda og referat fra veiledermøter Agenda og referat fra møte med oppdragsgiver Valg av fresemodul - Støttedokument Valg av kalibreringsenhet - Støttedokument Detaljbeskrivelse av konsepter, kalibreringsenhet - Støttedokument Forklaring til saksliste Fresemodul TMA4 Operating Manual Fresemodul TMA5 Operating Manual Oppgavetekst, utdrag fra originalt dokument Motion Supervision Informasjon om robotfunksjon UiA 2011 Gruppe 13, Prosjekt 14 - Verktøyskap 51
52
53 C=DE=?=FGHI= JKLJLKMJJ #1$ %%&8%&%% '()* / N 5PQ 71:5R SX$N YZ[\Z]Z^_`aZ^b c $12 :5N Rb 121 $ 5 SX$N effgh\] jk _[f[l^hmnzoap w xu yjfamonz_j hz {^Z_]^[{aml\jfp } xu ~^hz^j_kj^zp xu ^ZmZ_h] \ƒ ml[f]z\p xu h hap 0$: :5 X 2 $:0P 1:5ŠX$N$ ŒV 1:5ŠX$NXN /v8 / v$51b /0u8 /01 u:51b uv8 u v1b 7Q8 7Q:$P % X$N dx1 PQ 5 1:05!" q 5P X$5 T6 T6} q 02 :$ q : $ 5:: $2 P:1: 1W q r $ :0:1 s N $21P1 q /0 Q: X$P19$ $P c5: $21P1 $P 5 q SX$P19$ $P $0: $P 12 WU q 6052c X$ 5U:0 W0: 1 $W$ˆ 1:05 ccn $21PP2 1 $W$ PN 22 1 :QU:1 $2 52:15W2N +,(-. -!("!! 71: S#N TU 71:V W: $9: : 50N 8 q r $2 1519$X5 5 1:05 $21P1 /v q 7U /v q t5 Q2 :$P$ uv q $PP1 5 XPX51 /0u q T $W$ˆ /v
54 D=EF=G=?HIA= JKLJLKMJJ #1$ %&'8%'%% ()* N 6PQ R6 S T U1V 011 T;61V0 U$61 02 W2 ;$PP1 6 [P612 [$P1:$V \]^_]`]ab W $[Q 1; d 1Z[ P1 f 02 \]^_]`]ab 0$6d 111Z1Q; P 1PP [1 k d P$1 [$P1:$ $P 1;16 $21P1V 1P ˆ 02 \]^_]`]ab X [P$16 62:262 [1 1PP [1Z;1V R7ˆV Œ 02 \]^_]`]ab Z[16 $P[1 Z1; 1 e$z$81$ $P 0$; ;6 [ 2 $;1P 1;6 [$N$ Y 1;6 [$N[N 81; W# [ [$ PQN 81;6S % Z2 6 8Q;$P 9 [;$P[$PV 2 $6Q2 d PY Z gahii]jb 56 [$P1:$ $P X [P$16 $2 1PP 6 ŠW89f N R116X2 d ; XP [$2d 1 f9z 1 d [$P16 $P 1;Y 2$;:N T16 [$12 6 ;1[2 R7 $P 12 ZX V P 1 11Z e$z$81$p162 1 ;N 9f 1 ;$ $P P1 ;1 P$ 1 1:$ 1 P$:;N [ P2N 01 6 [d [ ;$6 $Z$N gahii]jb Ž; 1; [Q2 e$z$81$ gahii]jb e$z$81$p162 1 ;$ 6 Z6 P6P 162N 9 $:; N V lmnopqrpst vo wxwnyz { } v~n zvnpwq oy}qnx xny psƒ~wn}p} nl ry vowr~nyn t {}yz npr ƒvtw ƒvn gahii]jb 6X $P 1 2 [P[61 ;1 161:$[6N 9!",-)./.!)"!! 81; W#N RX 81;Y Z; $:; 5622 Z6 1 $ X PQN TU P$:;N TU [$;$PPN TU 01T
55 E?FG?A?HIJK? LMNLNOPLL #1$ %&'8%'%% ()* Q 6RS 81;6T Z U[$ \]^_àbcdaea]f g h1 162 $R $:;6Q z {W ^}^c~ep^f 01 S; ;$ [S2 Y1; 1 $Y$81$x m {W tqitca]padƒ ~ ˆ oe_c]pad ^}^cabo^d^qpf 7162l [$ 1 21 {W jbda] cpd ]^}^cž_btsf h$ ;16 21 l 2 [$ y [y S;6 6 ;1 0$; ;6 [ 2 $;1R 1;6 [$Q$ X 1;6 [$Q[Q 0h9 0 h$61x 01g9 011 g;61x gh9 g h1x 8S9 8S;$R % \]^_àbcijca]f 01 6 l$6 1;62 RS l 12 ;6Q mqq noe]poq p r]aie]prc_sdtof # [$1 R 2 [R[61Q upvf 01 l1 w ;$1; R [$;:62 61S 1 1;16!",-)./.!)"!! 81; U# VW 81;X Y; $:; 5622 < {W ]ssa o]f # $ 1;;l 1 21 Qx 21Q < 6 Œ 0h {W \ Ž~sa _ 01g 1Wx [$R1:$ 1 6 Y6 [R612 y RSQ 9 ;1 [y Q [129X ;1R16 [1 [12 78Š 0h $Y$61Y 0h $ 6 ;1 Yy Rx 6 Ry YW ; ;6 0hX gh
56 KLMKMNOKK #1$ %&'8%'%% ()* P 6QR S6 T U V1W 011 U;61W 0 V$61 ] 02 ^_à_b_cd X2 Q$26 Q$ eq612 e$q1:$p t # 1; ;1 [r Q P ;12 $[$1$W ^_à_b_cd [e16 21 r 1 ;$1; Q 7$ {P U[[ 12P ^_à_b_cd [e ;$1; Q 7$ 1 12P 0$; ;6 e 2 $;1Q 1;6}e$P$~Z 1;6}e$PeP 81; X# e e$ 1;16 QRP \ 0V9 0 V$61W 01U9 011 U;61W UV9 U V1W 8R9 8R;$Q 81;6T % fcghh_id # [6 e$q $Q 21 ;$$1 Q klmnl2k5m2 $2 lopl '', 12P ;RY;16[2 $2 eq$16p q e1 1 ;RY[1P 01 y1 Q$1 161:$e6 r Q$ :$ 1 6 e$qz Q$ ;6 [1; 1 $21QQ Xuvw7 e$ ;$2 1 xsz 09;$ 6 uxx#9 ;$W 1Q Q162 $2 e2 211QQP $[6Q62P!",-)./.!)"!! 81; X# SY 81;Z [;6 162\ $:; 5622 < z 56 6 $ 1;16 e$q1:$z $;1Q1:$P 0V y1 Q$1 R;;6P 0V Xuvw7 $2 6 Q$1 6;$ e$ 1;2 1 $21Q1P UV fcghh_id ;$1; Q U[[ 12P $[6Q62P 01U fcghh_id ;$1; Q 1 12P $[6Q62P 01U 12P 1; e r $ 1 $;1QP s 9
57 DBEBDF> 1;;L MP$16T 01 L1 1 2 $P PO6 O L M$P1:$ $P ;16 P$6 Y7SW Y7< $2 Y7_T Y6V1;P62 M1 ZL1 82 ;$P $P M$ $2 $;1P1:$ $P $1;W $ $1; P$1T #1$ %&'8%'%% ()* )! GHI JK 01 L1 2:$ M$N; O O $ $;1P1:$ M1 QRGHR2Q5G2 2- S LàabbbTLL1T$a cdtte < LàabbbTLL1Ta cdtte _ LàabbbT66Tf$Pa cdtte L1 2$ M12 P QRGHR2Q5G2 6J - %4 5622!",-)./. - X V6 V61 O N O ;$1; QRGHR2Q5G2!)"!! S 12T 1;16 P$6 M1 R\]R '',W M$ O O ;$PP P $;1P1:$ $2 M$ MP$16T 01 L1 [ ;$1; P R\]R '',^ 12T MP$16T 8N;$P L1 62 1U $:; 5622 < ;NU;16V2LW L1 ;; 2 161T ; M1 62
58 E?FG?A?HIJK? LMNONLPOO #1$ 7%&8'&'' ()* QR 6ST 81;6U Q V[$ \]^_^`abcde # 1;61 1 8T;$S 6 Z6 W7 f [S$16g 1S f ox pa`jak^kq^]e W1; Z62 1 S ;$S$ $S u ox \a]_vw^d jx ]ayaq^]e 8T;$S $Z$ 1 S$6 $S 0n9 0 n$61g 01m9 011 m;61g mn9 m n1g 8T9 8T;$S ' h$ [;$S[$SR 1S1; 6g 1;11$g ;1Z6g ZX $R rt $2s Z6 g 2s ;1 s 1Z$Ss $2 X;t n$1 :;; $S 8T;$S z1 T2 6Y $[{1 :$Y $:$ $S 6!",-)./.!)"!! 81; V# WX 81;Y Z; $:; 5622 < 0$; ;6 [ 2 $;1S 1;6 [$R[R }zuy6r$z$ Rh$SY1Y QufffY1;6 [$R[~ i]cjj^kc``^]e # 1; SS QR 01mY mn s 62 1t mn T2 }[R 62 $:; $Z6S1;; 1 S~R 0n
59 KLMNMKONN #1$ 7%&8'&'' ()* PQ 6RS T6 U V W1X 011 V;61X 0 W$61 P 02 ]^_`^a^bc Y2 S2 ;$RR1 6 er612 e$r1:$q k 02 5;2 j ej \6 6\6$;; 1;Q # e 6 e$ 12Q e1 t $:; r1 2:$R2j 81; Y# e e$ 1;16 RSQ P 0W9 0 W$61X 01V9 011 V;61X VW9 V W1X 8S9 8S;$R 81;6U ' $\6R1;;X j r1 6 RZ ;$R1 j $RjQ fbghh^ic 8S;$R 6 S j ej \6 er$16 $2 e;$re$r 56 6 u \r:662 $R $\6R ;16 $jx R $:; j 0$9$1;l n o$\$;sz e$ j 6S Se6np!",-)./.!)"!! 81; Y# TZ 81;[ \;6 162P $:; 5622 < 0$; ;6 e 2 $;1Rv 1;6we$QeQ xru[6q$\$yqz$r[1[<ptkkk[1;6we$qe{ $:$[ 6 $R 6 u S2 Rj 8S;$R $Q 01V[ VW 6S 1 1; kq 01V[ VW q1r1; 612 e $R rz61 j s6r1q VW
60 E?FG?A?HIJK? LMNMNOPP #1$ 8%&87&'' ()* QR 6ST 81;6U [ V\$ ; $S R <RR S; $S \2Y 1 1Z ^ _X 01 T; `:6 6 ] \ $;1S1:$Y \$S1:$ 12R aa b7c9 0f9 0 f$61o 01g9 011 g;61o gf9 g f1o 8T9 8T;$S '4 5622!",-)./.!)"!! 81; V# WX 81;Y Z; $:; 5622 < < _X W6T X2 1 \;$S\$S gf h _X c$6$ #i$ gf 0$; ;6 \ 2 $;1Sj 1;6k\$R\R d`uy6r$z$lri$sy1y^mnqqqy1;6k\$r\e [98 d;$ss6 ;TX;1 \1 aaer 0f \ ] $ 1 $;1SR 9
61 GIUHLNTVW 81; X# ; #1$ 8%&87&'' ()* ;= 11 > ABCD FGBHI FJK L MLNHOLPHIH IHQHIGMHI LBBH HI KHIBHM FJK QHINLPR HOHI QIHKNHOHF FMSI FJK TCDNHI 5< 02 lmnom\pq`prs uv]wxya 01 f1 b$1 b16 c1 6? 02 zq^{{p ^oopqa # 1; bb }? 02 ~qz_^\^\ `r` n {pƒ a 01 f1 ;$1; b 1 $2 c> ' Xgij7 6d $b e2d c$2> 1 $6 1 k 1;? 6;;62 c$b1:$? $b 1;16= e; 6 $2 $:$ 62:262d 6 6 h6 1;1c 1bbf2 b $:;?!",-)./.!)"!! $:; YZ[Z\]\^_`Za 1; $b c2d 21 ce6 1 $:;61; f1 lzq pr { qz[z\pqa 81; 6 > $b cb 6 1;61 b 8e;$b ;1c 2 e2 ;$b1? 5 62 > g$h$81$=
62 IJKLKLIMM #1$ %8&87&%% '()* / NO 5PQ R5 S T U1V /01 T:51V / U$51 4^ 45 :05 _1 _1 :0 ] ` a0:1 1P $2` $ _1 4b 0$ ` P05229Q 5Q _ Z` $Z$ $2 4f 02 /0 ]:: Z:]5 ` _$1 gh$5$ #i$g :1 ZX ` 71: W# ] ]$ 1:05 PQO [ /U8 / U$51V /0T8 /01 T:51V TU8 T U1V 7Q8 7Q:$P 71:5S % ]:$P]$P _1 115$2 $O c$z$ P` P 115$2 0212V P ]:$P]$P P` _1 P 115$2 212O _1 ` 0$ 5Z5$::O # Z5 $2` `P5P15 :1V!" +,(-. -!("!! 71: W# RX 71:Y Z:5 152[ $9: \ 02 /0 ]$P 5 $P 1:O /0TY TU 0$: :5 ] 2 $:0Pj 1:5k]$O]O d_sy5o$z$loi$py0y^[mnnny1:5k]$o]e O ]Z01O /UY/0T 1ZO 8 ]1 1 1: ] ` $ de 1 $:0PO /0TY TU
63 V WJ52 $0:0VVX YZ[R\]8U^ #7_[ PRQ # T $V T1 P $2 P ^ 15` 2 115$2 $Q #7_[ PRQ # :$VK19$T $V T1 b ^ b 215 $2 115$ #1$ %8&87&%% '()* / (! EFG H%I 4 0J:5 $K$51K K5 1:51 1 $ $K$ LMNOPP8QRRS T1 MU T : :: 115$2 $ ` W:$VW$V^ ` V` K5 05:$Q $V :: 5 K5 1 $ WJ T$$9:Q J2 9:: ` 1:05 MU TQ f #7_[ PR #7_[ Y] $V T1 P ^ P 215 $2 115$2 0212Q # K5 $2` 9:: $V W:$VW$V T1 115$2 $^ : :: 21 %3 4522!" +,(-. -!("!! 55 $K$ LMNOa8QaaS T1 MU T V WJ52 $0:0VVX YZ[R]ba8U^ $9: 4522 V U 0212 ` #7_ PR T 5::52^ ` 5 20 :0 Kc 2 1 T W$ 2 ^ $V K5 KT$ W$ TJc MU $ ` 5 5 d V052T ` Kc #7_[ PR 1VV V #7_[ PRQ eq 12 1$ 0::T ` J MU $ 1 1T22 1 :: 5V /0 V` 1 :$1: V 7J:$V $2 W 0 T5: c MU T $V $K$^ $V c:: 1 1 W:$VW$V T1 115$2 $Q # V` 9:: $ V$ K0:V1015^ $V
64 :;<;=>? A=B C FG?; H;I J;KL;I;= MN MOOI=>NPNKJ;=B lmamlnpoma 1 _a22 #\ 19/3 ]# #89E #9/\18# #\ 19/3 #89E 3[2E 5!5+*+ g6 h*i!! +1! 2 19/3 #_3\32^ 1\ /[9 E 9 9#\\ "1# $9%&9%&9 '5()*+5,-,./ 01,, &$ "1# DEE Q3 R S U V1 0[ \[ \ 3 ]1 #2 #122^ #89#21 _3 9/ \EEE #2 3 W #2 9X 2# # c 1 3 _3 _1E S./1 U931 S. V#31 W3 X S Y/ Z#2 6[\ W6[9#\X! 65,XE 5! 3 _3 9/E 5[ 1# _3 ]#3[ EE 6[9#\ 3#913 W,d!e5! f*./ 1 #89 #]3 99 1^ c _3 113 a \[ b# a " _3 #2c Y/ Z#2 6[\ 9/3 ]\91] 22` \c31 9 # 3 1# #E3E #\ 91 _a 1 #892/E " _ V#31 9/3 # " _ #892/ j ]\ 913 /93 ]\]31` \^ 1\ ]#1 k\a32 / #89 #_3\32E " _j 1 #89319 _[ " a\ 32 b##89^ _a 1 ]#322 3 ]#\18# ]#\ 1 #122 91^ [9 #2 9#\\1E " _3 /1_ ]#3[2 91]918# W 99 #89 #]3 1 c^ ]# 3 1_\2 3 #89319 _ # X^ 1\ 2` \#18# 1 9 a\ #\ E 12 _/9 E 5[ b1 3 #2 ba2232 # #2 9 #\ #\ ]#[ae 6#\ # \#1 # ][ 8/3E 63 #\ #89 b3 1]1^ c b1 _c 2/ \3\\
65 C;<= C;<= "1# $9%&9%&9 '5()*+5,-,./ 01,, &$ H # 91 3 I1JK3##89 LM 29NO91 3 6N9#PQ abcb efghbc egi jbbj kl jmn opmiqjor jegs pgfb tnksbnbicbfbj mn ctubi ctsgcbf ubcv R 91 8S%&9%89&9 V 74 9NO31 V ^#I#6/# P/32 V _93 R I8 V XP3P2 1 /13O2 1 3 V 6O93/ Q 9NO9Y P19Q 4 9Q V /#P19 28N2 1 9NO 98`22 \3/Y I3R2]M P19Q 4 9Q Q O93/ V X67L N3 R 9NO V 6NI1M 1/#P19 #2 P1/3 192 V.XM 21Y9 I/92 V "Y99 V 5/32K Y# P1/3 9NO9Y YQ9Q 1I/ 1/#P19 O93/ V 29NO913I \P19Q Q 913I2 4 9Q]! 5! #
66 B>C D F<GHI JKG LH>IKMNC KBI}~GKB 1 _ ZY1# :: Z#1 1 # 2/V] 1ZZ\2 [ / ^#E {#9:^Z^41z.18121Z [Y ^#422 _ 42 #Z Z/42E :/4 8# 4. T#41 ^# _ Z \1 _ _ 1:/4 #:/ZE T1 :1 #Z :14[2 [4 4 \ we8 xe 212E 7Y:#Z z W/ X#2 #2. T#41 12E X^1 /:4/ 4 [ ^#/2 ^# 1[ #9:E 1 1 :1Z#] _ 1 4 v #Z [4 114z [ZE :# :: [ "1# 8$%&&%&9 '5()*+5,-,./ 01,, & "1# 5EE O4 P Q S T1 7#Z 114 [4 ZY \#4 7Y:#Z 4#:14 14] ^:: :#] Z 1 S#Z ZY \1 2/412 _ [^[Y: \# 7Y:#Z] #2 2/ Z4ZZ 1 #Z ] Z Z/42 Z Z# 78w #Z ^Y 114E Q./1 S:41 Q. T#41 U4 V Q W/ X#2 7YZ U7Y:#ZV! 5! ibji kblemjidja fing opqikjr sfrn dqr abcbdjit ofmd ji murofd olqoj bsja àbcbdcef`g " [4 _ v T#41 :/4 # #:/Z19# ^1 42 #9: U#:/Z " [4 114 _ 422 ^1 /:ZY Z. _ #12 :4E EE 21 :14 y / 4 S #Z2 1 # _ :## #2 :/ 4 12E #9: ^Z^E 3 Z##: ^#1 29#Z212 1 :1^:19# #Z [4 114 ^#2 ZYE W1 [\# #9: # 1 [^ #2 #/:E S_ \1 4 #Z2 / [^ 4#:14] #/:9#\14 ^:: #/: / #/:9#] 1Z ^2 #/: #Z 1 : E 6# 4/ 1 #Z2 :# # #Z #Z_ #Z 1:/4 ^# #] àbcbdcef`g T ^:: #[# 1:9#] 1Z ^_ #[4:: # #ZZ # : 1 \1
67 DEF GHI? KLMLMKNLL #1$ 78%8&%&& '()* / ;5O 6 ps qyng Y_ mà[`lrfznh R7<s R7t 5 R7us 20 5 Vv522 < ps qyng Y_ `ow`x mra _àbxcdbynexàaeogh 20 5 Vv522 V$v1:$s t ps {o[xyny[ ro Y_ mà[`lrfzn} màb_`o[rlmral`ah 20 z; ~ ;51522 u ps ]]nc[oeog ]^ _Yng Y_ XZaXYnh 20 z; 5 V1 8z;$v 12Q 152 ps azb Y_ arxrxh y1 8z;$v 1U $ 5 V1 0 U0; /j9 / j$51s /0i9 /01 i;51s ij9 i j1s 8z9 8z;$v & y$1 $ 0 151:$ Vv$05 $2 1 $U$s ;Q $S V$ ;T $;$U:;s 512!" +,(-. -!("!! 81; P#Q RS 81;T U; $:; < PV$Q WXYXZ[ ]^ _`abxcd[by] e fygh /0iTij PV$Q kàlfaemx[]nyoh /0iTij ps WXc_xYaèàh y$ ƒ PSƒ ij ps ˆ_Y `a f` [Xrà [Ybò` ;1 8z;$v y:5ƒ /0iTij 0$; ;5 V 2 $;0v 1;5ŠV$QV yot5q$u$ QŒ$vT0T 6t<<<T1;5ŠV$QV Q V;$vV$v ;15 V$2~Q ijt /0i 1 $5z2 ~ v Q ij V$v1:$s ;$;50:$ $2 v2 $v Vv$05Q ij ;$;50:$ $2 v2 $v y V$ ;zs;15u2q ij 1 U0;;$$1Sv $Q ijt
68 EFB> G>HI JKLKLJMKK #1$ 7%&8'&'' ()* N 8O;$PPO Q5 R S1 T$2 8OPU V W1U 011 V;51 02 \]^ `ab Xd$P $P 11 e ;OY;1N 0$5O2 5 2:$ PN 02 \]^ `ab l1 dp dpd51 d$ P$:;N 6 02 \]^ `ab Xd$P $P Y1;U 1P $;1P m 02 \]^ `ab Xd$P $P ;$;51:$ $2 Y1;U 1P < 02 gh]ijk_b XP5P2 1 dp$15 $2 d;$pd$p 5 [5 2:$ 1 n 02 gh]ijk_r p; 5O 115Y2 P P152f d$ 1 d$ q 02 gh]ijk_b S1 ;; $ [f$ d$ f5 O ;OY;1U [;Y5 s 02 gh]ijk_b W1 2 d1 1U P O e 2:O P d; 81; X# d d$ 1;15 PON 6 0W9 0 W$51U 01V9 011 V;51U VW9 V W1U 8O9 8O;$P m 4152{1{dP$15Nd frz5n$[$}n~$pz1zq6<mmmz4152{1{dp$15nd < 4152{1{$$5{Nd frz5n$[$}n~$pz1zq6<mmmz4152{1{$$5{nd 81;5R '% ;OY;15[2f<N S$ 1 $;1P $5 8O;$PN f$ Q7mU Q7< $2 Q7n [5 1 $ P$ f1mn S$ 1 $;1P $P $Pf15 15; 5O2 $2 1[d152 e ;52 1 ;$N $2 1;5 d5 ;$ ;$PP 1; ff$5 5 dpd51n gh]ijk_b [d15 21 e f1 52 ;$ ;51 d$ $;1P $5 8O;$PN 1f22 1 f5; $:; f$5 e PN t]uivwxib 01 $; $Pe52 $[$$PP d$ e ;1 d1 gh]ijk_b [d15 e 1 dpd51 5 e [d1 f$5!",-)./.!)"!! 81; X#N QY 81;Z [; $:; < y 02 \]^ `ab 8O;$P do5 1 1; d15 [$ 5O 1 PON 01VZVW 0$; ;5 d 2 $;1Pz 1;5{d$Nd frz5n$[$}n~$pz1zq6<mmmz1;5{d$nd gh]ijk_r 4; $ 5 5O2 21 f1 1[d15N VW 115 $P [Y PN VW ; dp O;$PN 8O P$ O dpp52p $P $ $ r 2$ $;N VW P$:; dn 01VZ VW gh]ijk_r dp$15 12:$N o5 $52 Q7mN VW 1 f$$:;n 01VZ VW ;$$1 e [$ $2 $[$N VWZ
69 IJKL JM **$' f 1g h 622 ig ig1 g 116 g6 1g igj2 2 k1 i ig16l!"#$%&'('&)'!*+ *$,!-'&./,, :;<;=>?@ABCD :F@GHH bcdc`dbc`` Z[\]]^ `a
70 : <=>? =A BCDEDFGHI> \ ]^^_`ab **$' K1g P6 QM12 9 PQ KL 21 M1 K 8LK 1 1M N JK16T M1 L 8LK S J 1 M K K M1 K162M J PQT US JL M6 V 1 K JK16 J1 W16 JK1 XYPX TT6Z 1MKK M L6 S JK16T 01 L 1K S 622 JK!"#$%&'('&)'!*+ *$,!-'&./,, d f61 T d 7 01 N1 T 7 WM6T c WJK1 K 116 K6 T c JK16 8LK M1 K162M J 11K1 LNJ OPQR S JK16 T JK1 K 116 K6 1K JK[2 2 N1 J JK16T 7T 81KK6221[6 T d ct P 7 T c ct P d T c ctc P e T c ctt 8J1 T c ctt 8J1 T c ctct 8J1 T 7
71 CGHIJKJ ;WX YZ[ \ ;Wo YZ[ p ;W; YZ[ s 1N1 O1 62 M N6 2U ;WXWX abjdc?cgcde@>ja d 1N16 N2M12Mf 7 gn 1 N2 6S P 6 1N1 O U Q 7 N 1^ **$' NN ON16 N 12 ]^ S ]^ _^ N `89: U ^ N6S 6 _ Q 7 P 16 NPS N ]^ 2 2P 1 MfgtttU66UuNg26gN1TUMN vuuw M O1 1 U VON1 MU q 6 ^2 O Q R N O Q 7U ;WoWX abjdc?cgcde@>ja d 5f T 2 d inp6f NN j 7kSR NN j :l NN d mof :ST n d 1N16 N2M12Mf : gn d 5_^O2f `89: d h_62f Q^61O d 5f R 2 d inp6f NN j rur NN j 7TR NN d 82f :R 5 d mof k n!"#$%&'('&)'!*+ *$,!-'&./,, N6 6 2_ 1] O 21 6S N 21 M1 N2 _^ N `89: U mn 1N U Q 7 2 Q R 1 M ON1 1 M1 N 1 O P 1 U : 01 M1 N1 ON1 P Q 7 2 Q R O1 1S ON1 P Q T 1 _ N6 Q RS ]^ 2 1 _^ N `897 U 01 M1 U 12
72 ` 121M T W i j 1\ ]\]k\ W i f162 R 2 S2 M6 1g M R M1 R2 Y NRS 1f6\ 06 1g M 1 2f26] M 116 T TM16 f **$' :;:;< >?@ABCBDEAFGH@I ] 12 M 1f T2Y M 26 MS M116 2 M T16 RS M RST2\ f21 M fs f 6 T6R2g R2 1 RS1 2 RS16f2N\ 2 21 T 2g 6 M N6 T Y R Mg Y 1 21 TY 6 Y e fs W i 2 1 U897 RS2g R 2 S2 RSg M2 6 e T6 Y U89] 2 U897\ fg 1M 116 M M 21 MY f622 8RM f 6 f6 N6 6 MM1M\ h 8RM 6 Y\ 1 21 M TM1 M N MS T 12 TM16 8RM 1MMN2 Y 6 1f6 6 U89] T2 e M 2 \ 01 1 M 6 fs2 T TM M 62 W 7 6 W Zj R6g T \ MY M\ K 1M16 M2N12NO P QM K 5RST2O U897 K VR62O WS61T K 5O 7 2 K XMY6O 7Z MM [ \Z MM [ ZZ MM K 82O ]Z 5 K ^TO _!"#$%&'('&)'!*+ *$,!-'&./,, M M16 16 ]\ 2 16 ]\g Wi N1 2Y 61 M1M1M M216\ 8M Y Y 6 e R62 M f6 162 M6 M fs 2 1 U89] 1\ ]\ 2 1\ ]\kg M6 \ M1 M2 6 Y 16 1M
73 ƒ C D G C ;<=?@AABCDEFCECFGH@IBD **$' KLMLNOPOM RST U RST V RST W SLXYZ Y[\]^O_P`MPL_ abcn\]d 7 e f gomxphi\]]joyp]\]k l89e l89e l897 mnh_\]k op61q op61q op61q goxp axkd r : 7 sbto^nu_ annd v 7wx: v ey v fz: v 7r: 7: v z: v :: {[O]]\]k agd e: e: e: joxp ax}d exr w o1~6 6!**$.%/)./.) -! $% ˆ qš1 Š qš612 2 q6 Š 2 q 1Šx ~q Š 62 o 7 6 o :z 8Š Œ1 o 7x Š o : 6 2 Š q 2 61 q 1q2z ~ 62 o :z o 7 6 q12 q 12 11x Š 2 Œ1 Š212!"#$%&'('&)'!*+ *$,!-'&./,, : 21 Œ qš1x Š o : 6 p 162 Š Š Š162Œ Š 622 Š6 ~ 62 o 7z ~2z Ž Š q~ Š212 1q2 Šx
74 JKLM KN i 1j j 16 kjj 21 l1m nk162 o **$' lj k 62jp62 1 ol 1n 8ojq!"#$%&'('&)'!*+ *$,!-'&./,, :;<;=>?@ABCD F :G@HII efgfcgefcc ]^_``a cd
75 j kllmnop : <=>? =A B=>CDEFECG?HFGIFJ f gb622 gb1 b 116 abh bb b 2 a1h i2e c c e1 s{q{ sq 0bis ƒc u1xe yi a c ua61 c e1 s{q{ sq 0bisc 1b1 f ab 8db g1 1c 01 d 1b KLMNOPMQRS UVWSMXYSPZQ[WVWQ\] PU ^MNNZ_PMP^ RSPZ QO`ZVO 116 abc qe6 c r qgb1 b 116 ab c r v 01 a1 c 7 ~61 c } 8db e1 6 6 f 116 b162e 2 21 e1 b1 6 rc se1 t1ab ut c r rc se1 uu u1xe yi g u6 11b c v rcr {216 ab c z vc y12 c vc 0112 c } rcc 01 c r rcc 8g1 c v rccr 06w 16b c v rcc 01 c 7 rcc 8g1 c 7 rccr 06w 16b c z rcrc 01 c z rcrc 8g1 c z rcrcr 06w 16b c 2 1ig162 g i2ec 021 r9z e g **$' ew cˆcxbw1xw6wgĥ 2wr Š{ 8{uu{ ce ccƒ 021 r9 6 2 b 021 r97 1b e g1!"#$%&'('&)'!*+ *$,!-'&./,,


76 CGHIJKJ DLDHJBJA ;MN OJPQJ>RCP> SCDJADLDHJB TS 8UV 1 X V1 VZ6 62[ 11[ X^11 2 a6 i 021 :9:jZ ^Ù 8UV 1 2Z V ^U [ a VU :9j` 01 2 _U22 1 UV [ : UV 16 1 U 1 61Z6 _1[ 216 V 1 a1 61X i 021 :9 j` 5^U VZ6 2 1VV V2116 V 6 _6 _1 1` VV 116 a66 1 VZ6` i_z j 6 V 6 a6 Z ^U ` 8UV X1 16 a _1 1VV V WX1 2 U2UV[ ` f]\ 7: i\]\9 U2 V V12Y 9aj` UUV X V1 a 1^2 1 6 ^U_1Y _26V^ a VZ6U61[ 1V 21V1 V 6 V1 216 a1 61X V _26V^ a _22 1 ^U11` 021 :9l m!n$'non-$* pm 4/"'& q8 26 a 1 a1 1 1` ;MNMN ki>gde@> e Z X1 V1 UV 61Z6 V 116 ^U ^ V` ]Z UV V 61 6` 0^ av612 av Z **$' WX1 V Y 62VZ61U[ \]\9 6 2 V1Y ^U16_21U` a a6 61 UV a1 1 61^[ ` bx1c[ d61v9] 2 1` eav1 1V 6 VX16 UV 6 WX1[ 1 V6 fg h 7 i!"#$%&'('&)'!*+ *$,!-'&./,, 021 :9l r'/.n/(( s!, pm 021 :9:l t/u$'n$ ('&v/%$'
77 ;<> nbdubjogdj pp pixqo rkisbc EIK piiv tbgcxkbybju : 0M62 N1 O N1 PQ RPS b k62 1P6 1 N1 b dmp12o O1 Q l 116 R1 O 8MQm PQ Q 2k 16 1 vo1s v N 2k PQS PQw 1 Q6 xx : l 021 y9: y97ms RP22 1 PQ 6 N w Q 21 6 z 1QQS gnq1 6 N 6 6 2k 1 26 N gnq1 1Q 6 RP22 k vo1 PQ N1 1 1S 8N1 5 h`_ij_]a ;<=<; TIKUBVBKW XVBYABK [\]^_`_]a **$' MP 1Q wy 9y QQ fr1o {w Q }P6 g~ lk P61NN62 1m 5MP 2M2 xp61n 5 2 b dmp12 b N b e1n b f1 b g2 MP2M2!"#$%&'('&)'!*+ *$,!-'&./,, b P b 5162 k Q6Q M2 x1r6 6($ƒ/ /,!ƒ &.$' 021 y9: 8 ˆ$',- Š('& $

78 :;<;=?@ABCDEA GHIJKLKJ NKOHJKP KO QRSOJTRJUVTJKQ WXPSNK YSOJTYJZ ISL [\V 021 ƒ97 8+ ) $..&*, '$- 1 ]1 ^6 1 1 _à b ^ c c 6 c ]1 6` 8`c 16 ] l1 nhn9 c1m 6 c c1l6 nhn9 `2a **$' ]1 5 h_`12^ f l x 7 yc zl1^ ] l {21 `61 ]1 1cc } ~ yc ^12^ c c TOiP\Oj k QRSOJTRJUVTJKQ x LL \ TVK PKJO\OjKP ˆ i[koi\j RPTUJ USP k TRJ\[KPK QJP\jjKPQ 16 g1 Š h Q SOJTRJUVTJKQ Œ cc 6 Œ7 cc pl^12^ x L L\O Ž`6 bp 5 m 2 1l6 6($ / /,! &.$' ]1 de f ]g6a hf _` cc RSOJTRJ LKi QRSOJTRJUVTJKOQ Sj UkP ikook J\V k T[[\RK UPT I\O ^6 f 6 6 a ]11 f ]g6 c 16_ 216 c 1 1 ^a 216 l^16 2 c1 6 6l1 c 11 f ]aa _à 8`c 1 cf _`m 1c c _` a o^1 6 2f 622^ c 6126 c 2_ c2 6 f 6 `c c _`16 pd89 `ca :;<;< qrsctutbvcdeasw 0_62 ]1 ^ ]1 `c l`a!"#$%&'('&)'!*+ *$,!-'&./,, ` } ~ yc ^12^ ƒ c c } ~ yc ^12^ 7 c c z116 g1 h
79 ;<; ijckglmnodcl pqplch UY 6 u ca6 1 6 TUht 1 6 Y1 VX 61 X TU V W Y 6 s UY e X 6 V1 u6 6 Y1 6Yt SX e u e 2 62 X Tt W UY 1 U c61 UY 1 YY11h a : ;<=<;?@ABCDCAE GDCHICA JKLMNONLP Q STU12 ZON[\NLP Q U Q STU12a a1 Y T2 1e 1 YuUt uu 216e u e 2 62 X 116 TU u2 1 V1 t W16 Y162 X 2T Vsu61 6Y TYVTe V X X r 6 s V62 1 UY Y Y16 V ut 8X 1 6Y VV6U TU u2t ;<;<= yicpnzno{px@kca 16 btt ux 1 X 1 V t V 12 6 UY c 021 b9:he YY1 Y V Y6 rv8t ;<;<w?gkopx@k 8UY 6 a1 Vsu61 6Y Y 6 1 VV6U c116ht ` a Y a1 Y16 TU12a X e YYt Y UY Y V V X **$' Q V Q W6 X Y6Y!"#$%&'('&)'!*+ *$,!-'&./,, Q ^ 622 V1_ Q `2 TU2T2 Q b 1 cdefe gh 021 b9: }~} 2ƒ } 6} }
80 a<m a decdhfcfgb@ : ;<;<; >?@ABCB@D FCBGHB@ IJKLMNMKO ] U _l 5 1_ U1 1 1U T `U U U16 16 kl 2 kll SU l 12 1 P R62 P S9 1 P S6 T 1 XNMYZMKO P l W 612 T 216 `Uj U T P \ 1 ]\ \1 W\ ] 1W6j U U2 6 12_ 6l **$' u u v1`u wv x 7 U16 1l kl ylz {V k wv w`61]\ 6 wv x 7 :ly {V 7y 9 V1W6 6 wv x 7 lzz {V 7yk}9 V1W6 6 wv x 7 ly {V ww U16 1l kl ly {V w^ } 16 ]1x ] ww :l {V kk7kk97 V1W6 6 ww :} {V w1w6 kt ~'/!**$.%/)./.) ]1 6 6 U6 `U t 116 W1l 0_62 ]U1 U T 116 `U U1 ]1 i\1 rllst 1 _U 1UU 1 j 162 ] 21 T T \ `1 1 6 `U U \1 6 `U 6 6 l 86 U _U 1UU ] 01 \1 h 1 U i\1 2 \1 U1 1U1 U 1j P S6 T U6U P VU1 P 0T W262 6 P v1`u wv x 7 r1l kls 6 \1 _ T zl} {Vl P ww r1l kls 6 \1 _ T ly {Vl `U 6 h W62 161l!"#$%&'('&)'!*+ *$,!-'&./,, P ^2 _`2_2
81 ` anjkbilmnj DEF HIJKLMNJLOIPQRPSJT : 8; < = 1 ; 1;; ; >62 = ;6; 1?; ; ;16 01?1 12=?; 1 1; 1;= ; 6X <C16 1 ;1 62 = 16 2?; C 21?; 1 ;1 B1 <2 6 12X ; 1 2= 1 162A 1 ; 16 C >C ;6>X B >?12BA Y>?12B =?; 612 > ; C ; >2 C 8>;A 01;2 = 6 ;1 ;6;2 1 Z1?; ; ;2 ;6 2 ;C1 << C = C= C1 BA 81;2 6 ;1 C= 1 ; B1 C1 612 B1 ; A [ C>62 VB1 = 6 ;1 C= ;? 6 << B ; **$' ; 1 116?; C1 VB1 6 W ;2 C ;6; \\ ]?;@A C;6 6 ; 1 ; ;1 B <16 ;? 2 C 1 ;1 6 1? C1 2 1 ;1 622 > \[ t 9 16 C1uA < C1 B1 ; A 01;2 = 6 ;1 ; 216?; 2 ; 111 ; 2^ ;= C ;=62_ 16<2 1 >?A 21 ; defghijigkl en opqqfrepeos CBA = 1 X = 6 216?; W 6 = 1A c= C;1X <12 2?1 < 1;X!"#$%&'('&)'!*+ *$,!-'&./,,
82 JKLMNOPKQRSTUKNQK MU RVWQKXLKSY 1m 2 6 m 16 q9r s1 m n s1t **$' l 1m m 16 n o1o6p 622 om n216 o !"#$%&'('&)'!*+ *$,!-'&./,, :;<;=>?@ABCD F :G@HII fhihjijhff `abccd fg
83 : S **$' R C D6 C16 1C MP N 2 QK!"#$%&'('&)'!*+ *$,!-'&./,, Q R6 K \ N K C C 16 D6 1 C E FGH I 06 K XF6K M Y6 1 K M 122 JEK F1 1K LKMKNOP 1C D21 FE D6 162 DK 0 26 EC1 F 6 21 F1 1C 622 Q 1K NKM R Q Z 621E6 K 7 NK R N Z GCEG HC K 7 NK R M Z CDH K 7 MK 01 K M MK 861 K M MKKM R Q Z [21E6 K Q MKK R N 9 8GCEG HC K N MKK R M Z CDH K M
84 ; ;KL MANHHIABH?BII ;K` wty qrƒ qpq q qp zqyw qy w pq q 61 6 P6P \WT 2 ST P P1 1 O 2 1 ST 61Q 21 1 S262 6P PST O zoqmj{ oq w} z~ qyvq npq {noq jk wssjpk vqp qy qzqmp jw mnoqj r wypn p on ˆrjs qpq r9 1 S1 Z 21 PP Y6 \WT 6 61Z P W 212 Y 021 :9:ZV Š O1 1 TP: P 2 61Q 6 1 OW P116V 16 \12Q O \WT ;K`KL cgh?>ij ; d eb@agfagj>a O1 \ 2 S1 1 PSTQ O OP2Q O12 2 W6 Y 021 :9Z 16 PST O 6 R 6 PSTQ 6 2 P162\ O P16 61 YhiZ 2 P **$' O 1 1 WT 2 S 21 1PPW Š P1 6 X 6 PX 1 TP 1ST P W V 2 16P P O62 TP SV X YhZ 62V 6 2 P162\ O 62 1 S1 1 jk mnopq rsto tsu sto vwxyr P1V S2 X 6 WT YP P SZ 2 T61U 6 PP OT 1V X X V ^ _ 6 P1 61 \6 TP R 1 P6P WT 2 T61U 6V 6 O6 TPV!"#$%&'('&)'!*+ *$,!-'&./,, Y Z 021 :9+.. / $.! */,'&Ž' -$'+ Y P1 ippz 61 P O ]V ^ PP 16 6 O : 01 O 16 P2 6Q 6 R ORS61 T61U 6 P 861 X 622 \ O1 \ 2V \1 : 0 1 TP SXS \WT V 021 :9Q Œ/ */,'&Ž' -$'$ V S WT16S2Q WPOWQ V 612 X P6P 16S2\ 2 SV 6 61 [161 6 T61U 6 \1 : 2 ] O1Q 161 S1 \ OT
85 df d6d ad a a6 a f 12f g wxyxy { }~ ƒ ˆ }Š ~ ~ ˆ a1 c 2 f 61 eb 2 b61œ 6 edae 1dd g 5 1 d6d ` g **$' ;9;< "&.-!"- =&3."$ >!**$.%/)./.) hijklmlj omlpqlj $. */,'&,&.-'&%$' C/)3'$. $' =!>$'- (D $.,%$ E&'>F, )G&'-!? )'3(($.+ E&'>F,$.$ =%$ )G&'- 3-$%3,,$.@$ E$.&*$.+ /,,$ E&' 3-@B($.@$ $%$'?/@$'$ ='3, / EF' 3- >/).!%$- >-!=/%/>$'$' &?$' $- -/@>'&* (D "! Z88 [> E&' -'B,,='B-$'$. &) \88 [> E&' */,'&,&.-'&%$'$. E'! %!? -/% #FB.$>-$. *&*$.-!.- 1e ad< d 611a f62 b1d bdg ]^1_ `1_] 1 a6 `< b c a6 d a6 ` r t6 r ]^1_ `1_] r u62 r 861 r v f 6 r 1 1!"#$%&'('&)'!*+ *$,!-'&./,, r 8ed 1`b d1 Ž š œ œ žÿ žÿ ] : 021 ;9;?/>$' $. >!**$.%/)./.)!? 3- >/).!%$- -/% #$.#&%@>?/> $. &'@/.A' -'B,,='B-$'+ */,'&='B-$' &) ('&>G$,-$- 5%$ 3-)!.)$.$!,-/?$'$> $. )!.) &) >,!% )D E'! %!? -/% #FB+ #$' 8 H -/% I H 4!. >$' -B@$%/)$ JKLMNOP RSLPTOST ULVPSWRX $E$,-$.?/',$' (D 3- >/).!%$- -/% =D@$ -'B,,='B-$'$. &) */,'&='B-$'$.+ >&* =$))$ $' *$,!./>,$ ='B-$'$ */,'&='B-$'$. C/)3'$.?/>$' &)>D #?&'@!. $. F.>,$- -/%>-!.@>$.@'/.) =F'?A'$+ >/).!%$- )$.$'$'-!? D@$ -'B,,='B-$'$. &) */,'&='B-$'$. $.@'$' -/%>-!.@ &(( *&- Y )!.)$' Ÿ š Ÿ ] ;gg < f d1 6 2f c
86 1 1 1 >?1 < Œ6E VWXWV Z[\]^_` b c d^]^efg^h 8216 = B < < >62 1=12=A 1 2 C < 16 1U=<E 6 D <l C?A 6 <D B <1E ; 1@2 < 6A 2 1 <16 <1E 01 1 C? A D 6 <1 1 1 mnmompqmrs umqm vwxr yq oyp z{{m zn }~ mp nz{ pqy q ƒ p < 021 j9fke < <? C? 6 <6 A 6 <D6 >? 6 BA < <2 1C D C **$' ; 1 < < <1 1= >? F $'%/,& C26 6 C < 16 C? 6?D6 C2 2 < < <116 D 6 B 1=<<E 01 =1 B 1 < < C6222 >? 2 C@ 1 < =1 < <162 2A 16D 216 < 2 C i 021 j9jke D D <6< 8U=< 22 D @6E 6? C622 ><@>E ;<6 161<1<<C1 C622A 1< 1CC1A 1<16 C622E C? 6?A D = <? 6? E 6 = < D >62 D =1 216 GHIJKLKI MLKNOKI!% $'ˆ 6!. Š/, &!-/.) 5 Q 0D < Q S >< 1C? <1 Q S ><@> >? A C622 C61 1 < !"#$%&'('&)'!*+ *$,!-'&./,, Q T1U C1U Q 12 6 < <D B 6 1<<6 <6 <C? i jeeke A < < = : : = 1 i26ka = < CD 1 6?6 2 6? < A <1 216 < 6B< < 1<E 01 > D = D <D i16ke <D 6 B 6?D6 < 1 A C1 D D E Ž212 < 6 C6 A =>? 6 61E 021 j9fa $ˆ$)! $% i6@1k
87 P RSTUVWUVXU ZT [\]XU^S Phi j\]xu^s k l mn[o\poqsuo Pht j\]xu^s P l XSoumvuoU]wU XqXSUm Phk j\]xu^s { l VUXUWZvUV G G 1 y J2b a JGLK2b 61 1GG_2a O1 N 116 K61a g O6 162 L d 2 ea I N J2c G 6 L62 L12_x JGLJ y G6G JK 2 16O2_ L6 GN6161b 1G G162_ L 11O6 G1 L62 K JKa z 1 G **$' :;<=>?>< A?>BC>< 8G LGGG L1 _1 N N 16 G2 6 N _1 6_ G Kb G O6 162 O N _1 L_ G Kb 21 1 OK LK c G G 6 16O2_b a GOKb 621L6a r 122 `La _1b 16 cadaefb 16 6 O21 _L G 2N G162_ L L1L6 GOKsa 16 LGG62G N JKb 6 16O2_ 6 1 O1 6 L6a r G 612 L6 G162_ L L6 d 2 gb L 62 Oa 1 L a F 616 1GG_2 G G6 ON 62 gb 6 G O6 LJ 6 21 _a G2 61b G 6 L _1 OK2 L 1626a D F2 G1 1 D H62 D I 2 JK12 D L D M G N G6G!"#$%&'('&)'!*+ *$,!-'&./,, D 8JG 1OK G1 D MK6 2 6K JG J2 G2 6 gb g G G 621 6J2a r 16G _1 1 1_b 6 1 G6G G12 6b s 162_ L 6 1 G K GOKb L 2 1 L G1 6 G _1 2G2N 12 L12 89b G1a IN d 2 eb G 21 1 G6N N G _a F 26O161GG_2 N 62 G6 b 6 1 OK 62
88 ; **$' DEF G H1GGIG J G 0K11 L1 MNOPPPG1Q1GRQOK6O161R9PRMGMQ6 6L1G H1GGIG J G 0K11 L1 MNOPPPG6L16GO6L1STUO6L1OGVQW:X9SYS9Z [Q1 \QQG H1GGIG J G 0K11 L1 MNORQQGPQ1G2OPO06NRPRMG2!"#$%&'('&)'!*+ *$,!-'&./,, :
89 EA? %( RUW g ƒgšg Œ g T [ 12 7W `T RUW L Ž ƒš I f gj N 1O: 1 O71T 12ˆ: 121 ˆ71T ˆO: ˆ O1T 9V: 9V\ 0V72 U 7 _ 127` a c : 67\V defgn 2 [7 12] h 1 W 0V72 12] h 7 _ 127` HIJ} ~gj gƒgn P7 1 1 [7W I ƒ N 2 [\ 11\Y W ˆ\7 Y 17` U 2 17W ZU [1 712 \V ] P7 1 T \ 17 7V \ V \ 117 1W ^ Y U 17 UT U Y Y V U7VW 87!"#$%&'()('*("+, +%-".('/ UW uu1 \V a 02 a 7 2 \1 1P a 21 Y W 21\1 a c : V \ 9V\ a c: Z\V a ijklm : 91 7 U\1 a no p Xh 1 a qrst p u] 1 a vw p P a xryz{ p 91 U2 9 : HIJ LMN O 1 P QRST 1 UV U2W X1 PY 1 91 R ^h 91] P W : a 7 V2 \ ˆO
90 !!"#
91
92 ; &.3 * '# (0 "# ! "# $ "# $2176%665 "# & "# & "' ( " "" ) "* +23 3,2 " " ( "# "/ % " " " " % *# % *' * 2642% *" &3% ** & *
93 !"# A"# P& 6$($& A )6 *++, -86.+/ *67-8/ ,66 #( :>: )6 789:;? * &!6!A )6 +7/67 -)8 06 /666/ /6*9B6 += *++,,796.+*789+ *7+ :>: -7< 9-6C576--= 8766/ 9)89D 9)6 6B69 +* * 9)6 +7/67 0= 9)6 789:;D :>: -7,,9))+/ 8/B8.6 58= /= 8/ ) / / 8= 855= = / 9+ E +* 9) * 9)6 +7/67D *+7 8= / * F6-- 9)6 / G< )6 H:IJ4; -) / 9+ 9) D,).) /.06D F6-- 9) * +* /886 8/+7 9) = +* 76K6-9 6* * 9) G 9)6 6B69 +* * L6 /6B67= +* 9)6 ++/-,9) 9)79= /8=- +* 9) /6 8B8806< ** 9)6 +7/67D 9)6 H:IJ4; -)8 8/ D / 8.)67= +* 9)6 9=56D.+/9+ 8/ K89=.+-/676/D /-.769+D *+7 9) M 6B6 *++, * 9)6 +7/67D 9)6 H:IJ4; 8= 8L6 8= +/*.89+-,).)D /-.769+D B669-< N O!$PA Q /6/ 6CR,+7L-D 69 +* D / D,9) 9)6 6C * / -56.*.8=,79< Q7.6- /+ +9./6 H<<<D,).) //6/ 9+ 9) = )6 96< S9) 7687/ 9+ 9) ) D 9) )8 06 9)+-6 9)6 :>: *+7.6< Q7.6- *+7 +9) ) )6/ + 68.) < T 6#$5!U 6"(A )6 /6B67= / ,8=- 96/6/ 8- V/.89B6W 8/ 9) )8 768 *= 8/.+/9+8= 6*6.9B6,)896B67 9) /6B67= /896< )8 * )6 967 B = 7) < X 6#$5!U Y P&'O#"$ 9) * +9)67, D :>: -7 -) /,9) )8* +* 8/ 89 9)6 6C56-6 +* 9)6 789:; -,).)6B /666/ < D./ / /6B67=D )6 789:;?- 7-L< )6 H:IJ4; /6798L )6 ++/ /886 / = *++, 8 6C5.9 76K6-9 +* 9)6 789:; 8/ 89 9)6!"# $ %&!'"($& 6&! 8/ 9)6 789:;< * 9)6 +7/67 0= (A * 9) G< = 98C6-D /96-8/ 8//9+8.)876- -)8 06 9) = +* 9)6 789:;< q r"!" )6 H:IJ4; ) / *766 *7+ 8*8.97 9)6 6C57= /896 /.896/ 68.) B+.6D,9)+9 8= 76/.9+-D = +7/ / /+, 8+9-< I D 8.9+ F./ G +7 +0[6.9+ 0= 9)6 789:; 8= 8=,8= [-9*= /68= * 9)6 58= /M * = 6B6 +6 B+.6 -)8 68/ 9+ 6/896 6C57= +* 9)6 967D 8L 8.76/9 /6 6/896= 9+ :>: -7D./ 58=69-,).) )8B6 +9 =69 6C576/D,9)+9 9)6 66/ = *+78 /6* < * ED 8// ) *+7.6D, 06.)876/ *+7 /68=- 9+ 9)6 58= / F,)6 9)6-6 / )6 H:IJ4; 9+ 76K6-9 /6*6.9-8/ *8,- 9) /,+7L * / +* +6 =687< J7 9) /D 9)6 H:IJ4; /6798L /= 8= /6*6.9-8/ *8,- 6B/69 9) /+7,+7L 9) K76/< J6*6.9B , / *766 +*.)876 +7D 89 9)6 -+6 / * 9)6 H:IJ4;D /M /+7 /6-589.) )8 8,8=- 06 9) = +* 9)6 789:;< )- /6798L 0= 9)6 H:IJ4; 6C./6-8 +9)67 6*6.9- +* 9) B/6/ *+7 0= 9)6 8,< )6 :>: *7+ +78,687 +* 9) D 789:;?- 6C56-6< 9-9)6 789:;? = 9+.)6.L 9)6.+/9+ Q8= /6 9+ 9)6 H:IJ4;? / 8// *+76 8/ * 9)6 ++/- + 87B8< = L86 *+/ *6/ 9+ 9)6.8767,9) 9)766 /8=-D B / 6967,9) 8/B.6 +* /6B67=< = /6B / 9+ 9)6 +7/ /6 6/896= 9+ :>: -7 8/.+*76/,79,9) 6)9 /8=- +* * 9)6 /6B67=< 9) * -.) D :>: -7 -)8 06 6C+67896/ *7+ 8= 809= 9+ 9)6 789:;< Z++/-,).) 66/ /, += / -0[ ,79 *7+ :>: -7 8/ -9 87B6 *766 +* 8= /96-8/.)876-< J6B67= 8= /6/ / 0= 9)6 H:IJ4; 89 8= 96 *D /-.769+D 9) D / *8.8 76* * 9)6 789:; / B/6 -* *+7-89-*8.9+7= **69 +* 9)6 +7/67< \ O"U' &]^_ ]àb^_ cd1 e ] fbg_] acda ac_ f``h1 d2_ 2_dhij #( 123 kb3 b11l_ d] b]g`b^_ 3_dhb]f à mdin_]a a_2n1 ^ǹb]f b]à _o_^ap ( stuvtww y
94 ! #"6" ,# " & S:6 T>UPN? B5 6_FD655A8 6_206D496@ CD27 4A D65F205B`BAB98 40@ AB4`BAB98 C2D B@ F6D5205 2D FD2F6D98 a:b3: GD 45 4 D65GA9 2C 9:6 G56 2C 9:6 7292D5 20 9:656b 9:B5 4A52 4FFAB65 BC 9:6 433B@609 D65GA95 B0 9:6 740GC439GD6 40@c2D 7496DB4A5J del RMM\/OR;\> \Rf RUP M\RO> NQ g<?/hp/os/nu " " i25! 47 " ! -. 5" # 67 32& ' , " ! 65 2Z ! 5"2 142 i "4-2 ]627j4 k35& >\S> 5DA "2 ]$X^ ! $%$ 3& '35"2332! 5" # " "2 2 "62 3 "4 " #3, " #65"5 5"2 # $%$ 3& / : A49B20 2C 9:6 3209D439E 4 FDB36 D6@G39B20 2D F C 408 IB0@ B03AG@B0HE B0 F4D9B3GA4DE 3A4B75 C2D 9B76 743:B06D8 B F6D49B204AJ KL M?NO>P<?> QN? ROS/TRS/UV SW> V<R?RUS>> ( " ! 5"2 ()*$ "2 5 5" " "2 ()*$+! #" " 5" #65" 5"2 32Y " & " Z " " ! #65" "# 5" & $%$ " ! $%$ 3 # " #6 " , 2Z $%$ 3 #3,& "2 ()*$+ " "2 32 3! "2 ()*$+! 4 # Y "2 225! ! " "23 42& [L SW/?P MR?S= \/R;/\/S= 2 5"2 # " #"6" #65"5 " 45"364567& 275 5"45 5"2 ()*$ ! " , " $%$ 3& X # " " $%$ 667! 3 3 4! Ž Ž l$ ()*$+ k0mx* m X^ nx)+$ 0' %$n% +$m+$$x]$ R332D@B0H 92 4D9B3A65 dopd 40@ dopq 2C 9:6 /94AB40 OBrBA O2@6E 9:6 C2A2aB0H 3A4G565 4D6 5F63BCB34A8 4FFD2r6@ `6A2ab 42 7& s 0323t 7& s ^26 k14675t 7& v s m4.275t 7& w n t 7& x s m # i366567& SW> ;<=>? ONzMRU= hsrzm RUP h/vurs<?> NQ /Sh \>VR\?>M?>h>USRS/T> >\S> 5DA ] k4343! vwu " s ] 54. m"72 {y wvyyy '4Z {y wvyy k41& & v& 6& k& '&! m& }~ ƒ ƒ ˆ ƒ ƒ ˆ ƒ Œ " s 7& y s " t 7& s & 13& 6 ] vy& t 7& u s ^
95 ,-.-/, 456 c^d^=e=:^ fg Ef:gfhe;^i jklmknn p E=; =: F@@GHAJD =: CC@>>D E=; =: F>@@@AFAHB?@@?D E=; =: F>@@@AFA?B?@@@.KKLMNOPQ -L -R/ SMLTO,OLP, LUB VOM/K-OT/ JWXGIX=E VOM/K-OT/ IGX?GX==E VOM/K-OT/ WJXGGFX==E 9:; =: >?>@@A>B?@@CD 9:; =: >?>@@A?B?@@CD E=; =: F@@GHAID ('( 9( &6' ' '' 7&8'6 09( 9( &87&8 88 b76' ( `O.PPO ^M/aaO & ' ''( 73&& (6 8'(6 6 8'' 8! '(6 &696& 9 76" \ =]^=,M_ " #$% 96 & 394 9(89 9(6 5( 566& 6'97' 5&6 36 ' 96''( & 9 76 )* + 7&8'6 09( (67 8'(6 8'' 7& (6 &76'926 YZ$![ 7 8'(6 3& [
96 TUVWX WXZVX[\]^_`^aa c M4N 24 1OP 2MP QR4S1/ % &2 % &2 % &2 % &2 +% &2 627! ! # !167#2 4! 75 "227!2# 3 ( , 43) 5 4 " )2!$ 7 89: ;< 7=>?@ 8;AB CDEEFB G 89: ;< H=>?@ 8;AB CDEEFB I 89: ;J K==>?@ 8;AB CDEEFB / # 52 "243678! 24# * '6!122#!7 7 52! * !167#2 6! 4#2# #, 56! 4!2! 4 32# (23) #46)!5435, 44)! !167# )2!$ I 89: ;< 7=>?@ 8;AB CDEEFB I 89: ;< H=>?@ 8;AB CDEEFB K 89: ;< K==>?@ 8;AB CDEEFB 6! ! 52 "243678! 47# !!2") #24 3 2( !167#2 6! * ! 53 52!167#2 2'4!5!)!52* !5 44)! "2 7, ! "' 4(2 " ) #* 52 5# !* ! ) "4472#* !!6(65)!27!3! 325)! ! $ 12# 47# 3224!2#*!!5 "2 4362# 5 "232! !167#2$ L&* 5!
97 T<\ 4 efghfii k _01 90 ('00)6 9'6 7'9 900cb ' *76(90) )56(9 9') 570(6* ' ) )8/69. )670) *8672 ( */( )62 $>? *78)9(8. 76*(6 9'6 /6 0/ 9'6 +687) ') 768)04 900) 8* 900'0*67) ) (6* *.8(8. 8/ ('86 0/ ( )' ;'6 900) 876 )'875 9'6 (9 /07(6 ) 76*(6* 68* '68* <,(6)) ) (8 68* 90 * / 9'6 )5*6 (06 19' (0)6=69 )9(5 0/ 9'6 900'0*67 ).('70) 19' )5*6 )'8/9 +88(2 00) 1'(' (6* )6 90 6,(6)) ) 8* '6 66(97( )5*6 )9 +6 )6* 6,()-6. /07 570(6)) 9' '(' 9'6 ()9067 )56(/6) 9'6 07* '6 )5*6 )9 76)56(9 9' *76(90 *(896* +. 9' * / 9'676 ) 0 *(8904 9'6 )5*6 ( )56(9 9'6 68)76) 8* 570(6*76) ) *67 9' * -0*2 307 (076(9 )6 9 ) 6(6)) ('6(5 9'89 9'6 900 /96* *06) ,(6)) ) 8* 9'89 9 ) 096* )670) 570+6) 19' 9'6 )5*6 9)6/2 379' '6 )98 (058. )9 ('6(5 9'89 9'6 )5*6 08* (0*90) *7 9' (.(6 * * 9' * 0-67' ) 8 76)92 TUVW< X4YTWUZT<<V [\2T2]^ 44W V<<\^ ;<Z_ [`Z] dba bd b EAF? GHI@ JBKJLI M? a2a D?GAN?C IPQFCB? >?JC 2a AO 6%$!$%& 68"%&89$: $%%8!""#!$%& 6#$%&?N?DL GJE>QFQFR ELEB?S
98 UVWXYZW[\ ]V[U^_V` ±± ³ R$2, -$2-! %$2/) (.2) e jhvomqr wsly jw njqs ij š ilqylwy t e ~ws hwm limjq j wjqi xslwmqr kœ ž Ÿ e sqimolimjq jwnsy x kslq j njkvws sy lmw a2 467 b24532c 432d e ghijklimn ijjo nplqrst e usli vwjxs mqisrwlisy zmip ips kjijw iwmvvmqr li { }t e ~qshklimn ijjo ojnmqr isk mqros lnimqr zmip vwmqr 32537ƒ e jqs noslqmqr e Ÿ mqyhnim s sq jw j ips e pl i ijvvsy jw pl i mq kjimjq mrqlot e vimn sq jw jw ksl hwmqr ws johimjq vssyt e «hxwmnlimjq j ips xslwmqr rwsl st e gnnhwliso xlolqnsy sosniwmn vmqyos hvvomsy zmip l ysrwss j mkxlolqns xsojz Ÿ kk :;<=56> =?@5A<= B;C;>?= DA 4;@D= AF DE??G?:D@5: =456BG?H C;:E56?BH NDE?@O5=?P DE? ;Q5;G FA@:?= >?6?@;D?B C;9 <68;G;6:? DE? DAAG= ;6B?G?:D@5: =456BG?H 47 16c Š52 Š 753 ª5 Š 12 ƒ 4ƒ ˆ Š 2 Œ 84c Ž ˆ43 ˆƒ 3224c2 Œ 84c Ž ˆ43 I $02,!)$! "#$% &'( )* $ +,J$)1 -$ I )! )* *!2$ ž rl Ÿ xlw +!,! )*+ %!,-! ) I#" 2-$SS, ~ ~ i vs jw vm ijq jwzlwy njqiwjo ijjo wsosl sy " %," 3!%! -.-/ )* $0 11!.* $K K)#!21, xlw! 2$!,!) + 1$ rl xlw $! 0$%2! #-!2)- *0) I 0,2!* $K! *0) 1 12)1,)2T1# L!$$#$#12 *0) 1#,*!!2.*! 3$#! %$.#1 *-2,0 $ snt 1#+ #$-/ 2) IM, 1! 0)- 3)! -$!,-! I
99 ijkljmm o ! #!$ ( )*7 +, , / 087 % ( 69 *) +** & ( )* / 087 ' ( 69 *) * ( )*7 +,-67 / 087 ( 5*567 )66- ( *96+9* ( 69 5*76 %&' PQR STU VPWTXQUYZ ZSX[ \Q] ^_S XQSÙaP[Z XS XZ W\QaUQXUQS S\ aùxbc STPS STU dùzzèxfpsx\q PX` W\VUZ \es WXẀeVbÙUQWXQg STU ZTPbSh]4 7 9: ;:< =>? <@? A:<:B CD <@? ECB FGE>< >H><?A C> ;:< LB?>>=BCME<C:; ECB A=>< F? N?L< :; EG>: O@?; <@??G?I<BCI >LC;JG? C> ><:LL?J
100 .67897:: < /$&/!"#$ (0&% % 1&2$ %&'(&"( 345 ) 463 *+772*56+7,-. ) 463 *+772*
101 QRSTRUU W!" $%"! &76' () *+,' 98-6./ *+,' 98-6 / &76' 4( ,( 56* 3 7,6&9,7 85 ) 9 *( & &67 ) :8+; <7, ,0 =687 >86?4/ 7 &, &,@6;,7 4(3 &176' 4 7 A88:* 3 3 B &,@67 9 <786. 7,6&9,7 :*5=AC / ) 887,> DB4 97*A =687 +,&- 9 7 &,076 > &,26 4 = ,0 ) =687 +,9 7,& & G(G(G4(G &6 C,+6 &5 4 =687 6&,076 3 C67 >86 9?4/ 7 &,26..?4/ 7 &,26. ) E , &176' 4(.?4/ 7 &,26?4/ 7 &,26.9?4/ =F* &,26 8= G)GG <7, ,( &,@67 56* 3?4/ 7 &, ?4/ 7 &,26. :,'67 509, " L "M%!% N!O PM!" L "M%!% N!O PM!" L "M%!% N!O PM! 18> >9 3 H,2 0989,7 6H G3 DI JG 4 9 =,9,7 9(D 7J*. <G &,69 4 ) 887,> J*K 97*A 4 &76' 3( ,96&9, 4 6&79; C,'6 ( 4 &76' 3( 4 *(960, ,872 &80 43 ((((((((((((((((((
102 TUVWUXX Z $#JK QJR LM#N $NJMSJS $NNLMO LMSLMO NLM$ N PNJLM % & '( & )* +,& -.!"#$ % & '( )* += -. > % & '( & )* +=& -.? ABCDE GBEHID / :59;<% & '( )* +& -. => / :59;<% & '( )* += -. ;<@12@82 /012013% & '( )* += -. ABCDE GBEHID
103 bcdecff h ! #!$%$&' QRSTSUV WVXYZXU[\.9,69.7 * ,6 * ) ) 57.-*9+ +* * *8) , (8) *68 +9,6 * * / *68 * ) * )662 9 ;< =>?@ AB CDEFGH FGIJ>?D?AEKL =G?GM>IIGNH FCDF K>O HABGNPDPG FCG F>>EC>EHG? M>NG <?>I FCG <GIDEG M>NG >< FCG GEGMF?AM BJANHEG B> DB F> 9 ]CG FDJG? C>OBANP IOBF ^G MEGDN <?>I G_G?K FKJG >< ANMEOBA>NB EA@G P?GDBGL?G<?APG?DFANP EÀOAHL >AE >? IGFDE HOBFa
104 LMNOMPP R!"#$% &'$(( ) +,-./ ,89: ;<= B0@8CD A.:/B.CD E/.F,G0H9 I:,E/1JK
105 ,876.;.//0 916 *97,9/*:$&'& &( EFGHFII K!" $%&'( &'( *6*9/: $&'& &C /96,9/> D-, *5-6 0/7B 5/*9/ 4959 D-, /,B6- *5-6 >/69 /56 16; 876 /.6 +7, /76 -/ / /8 +7,89/:. 76+7,89/ * 76<76- *9 +6 /. =8 > /. 916 *86 78*6 9;56: 16 *6 /. /9167 9;56* /. 78*6 /7 6<?869* 8-6@,66-; *: /7 66,97, *5-6* 876 8*/ 57/? **7A6-,/87 8* 8 57/96,9/ *9 5796*: >16,B 66,97, *5-6 *,760* ?67;,/6,9/* 8,,/7-9/ 916 *97,9/*: 16,16,B ) * , /76 +6 / ,/ * ,,/7-9/ /7 *55679* 4959 D-, 90/ 5*6*./7 76?/9/4959 D-, +8,B087-5*9/
106 ;1279B[\]^\ a %&'()*+ -&+( '()'./0'-( -10& '(/* :;5482 ;< 582?8?A 69 ;127B ;?6452> C2;@ DEF 69 ;7B %&'()*+ G0-&&+) '()'./0'-( -10&10 2%H4 0+56'(/* :;5482 ;< > ;112>B ;?6452> DEF 69 ;7B %&'()*+ '( 0I+ J-5K &-G'0'-( -10&10 2L3M 0+56'(/* :;5482 ;< 582?8?A 69?;92>B ;?6452> 32> DEF 69 ;7B N10&10 O-5 5+PQ.-1(0+5 2R4S 0+56'(/* @; =>? B 4'G0-( T/.K '()'./0'-( -10&10 24U 0+56'(/* :;5482 ;< ; ;9656;7B 82 32> DEF ;7 582 V;43> 69 ;7B HI+56/* &5-0+.0'-(.-(0/.0G 2HWRS 0+56'(/*G7!" #$ 7 7;34?;7>656;79X 582 5@; EY ;35Z?63?652> V25@227 ;72 24?8 ;5823B < 582 ;5;3 ;: X 582?;754?
107 !"# $%%#$!% &"# '( )# &%*+&$*# )#&, #!%&, # /9. & %# /5 476 ', #!%&, & 1526 / %# 1526 / /5 476 ', 1526 / #!%&, & %# /5 476 ', ! & %# /5 476 ', % #!%&, 0#%
108 D!"# $%%#$!% &'"# () *# #+ *#+&' &5 ( ' ' :2 ;03< & 5; ! ,-.# #+&!%'. (.$/ 3:4=
109 DEFGEHH J "#$%&"'# 9( ,* 9(6 76, >?@ )98;) ) ,1 +56 )5, ,1 )5, ) , )) )(8.9 $ ,1 5)6) 681( 76/+9+ 9(6 ;6+7 >?@2 9 9() ) 5+)) , 79( 9(6 7668)6 +. 9(6 9++ (+, =766 8, ;6+7 >?@) +A2 5)9+.66, -; 819/89 9(6 )6)+7,7 9(6 7668)6 5(8)6 9767) 89 0, (6 B ( (8)6* + 9(6 +9(67 (8,* 9(6 5) , -; 9(6 )+6+, /8/ ) 9(6 )6)+7 : 7(1(* -; 819/89 9(6 >0 )8* 97) + 9(6 76, >?@ 9+,1896 9(89 9(6 1(18 ) 1+)6, =766 8, 76, >?@) +A2 <+7 9( )5, C 89 0,1 )8.7+ 9(6 $ ( ( (6 )67* 8) 69+6, (8) +959 )8) 8/88-6 0,1.7+ 9( ,2 : (86 5+))-6 89 )9+556, )(8.9 +;* < +959 )8 =766 >?@ +A2 (6 )5,6 )9+556, ) ))6, -; 9( ) (6 81(6* -; 68) +. 8 )+6+, /8/6*
110 D!"# %&'()&*% / / : , :25 / : 5 ; / < :9=34/678 =34/ , / /
111 }~ ~ ƒ!!#$%& '( )*+*, -*(. /*+,0/ 1+ +'(.2(3454(-.2((- < >?@AB C?DC C?@ EFG@H IJEEKL MH@NJ@OAL PI AFH@AC '( )*+*, 2*Q(, 4/+1R( 4. '4S' (T(/ Q'(/ +'(,( 4. /* U*1- efg ijkjl lgmnfgo gpngooqrg kgisglmktlgo umvjrg wxyz{ :5:; < V?@ WFCFH EFG@H POCDB@ PI G?@O C?@H@ PI OF KFDY < V?@ WFCFH PI KFADC@Y PO G?@H@ C?@ C@WE@HDCJH@ PI CFF?P[? < V?@ EFG@H IJEEKL ZFKCD[@ PI?P[?@H C?DO C?@ HDC@Y ZFKCD[@ DC C?@ HDC@Y MH@NJ@OAL\ PO C?@ ADI@ FM IP]^C@HWPODK WFCFHI_ A?@AB < V?@ EFG@H IJEEKL OFWPODK MH@NJ@OAL PI X@KFG C?@ HDC@Y MH@NJ@OAL DC C?@ HDC@Y ZFKCD[@ < V?@ Z@OCPKDCPFO IJEEKL A?DOO@KI DH@ FXICHJAC@Y DOY YF OFC E@HWPC DY@NJDC@ AFFKPO[ < V?@ AFWEH@II@Y DPH APHAJPC M@@Y EH@IIJH@ PI X@KFG C?@ ZDKJ@ IE@APMP@Y FO C?@ EKDC@ 8`78 8`5 : a7875 9: b c98` b d
112 !"## %
113 $ $ !69" ! !29436# $20! % $$ &'()*(+,-.&'()*(+/ $03 789:8;; =
114 % $$ % & ''()*!! % % $ $ %,-,.!"#!!! $ + +!# / ! #
115 !! " #$%& % ' () *+,-. / ,-. / / 8* : ;;; : ;;; <


116 ! ""#$
Forum for Automatisk Produksjon 28. 29. august, Aalesund
 Forum for Automatisk Produksjon 28. 29. august, Aalesund NFA Forum for Automatisk Produksjon August 2013. Page: 1 CAD basert programmering og fresing av komplekse former med industrirobot EU prosjektet
Forum for Automatisk Produksjon 28. 29. august, Aalesund NFA Forum for Automatisk Produksjon August 2013. Page: 1 CAD basert programmering og fresing av komplekse former med industrirobot EU prosjektet
Oversikt Det for verktøyskapet. ble gjennomført PU for å sikre at det ble et godt resultat
 Våren Prosjekt Gruppe MAS-302 2009 nr. nr. Hovedprosjekt, 312 mekatronikk Tittel: Utvikling verktøybytte av system på industrirobot for automatisk Innleveringsdato: Preben Ankersen Gruppedeltakere: Veileder:
Våren Prosjekt Gruppe MAS-302 2009 nr. nr. Hovedprosjekt, 312 mekatronikk Tittel: Utvikling verktøybytte av system på industrirobot for automatisk Innleveringsdato: Preben Ankersen Gruppedeltakere: Veileder:
Forprosjektrapport. Automatisk avemballering av pall. Skrevet av Marie Stensvoll og Sondre Wollum Hansen
 Forprosjektrapport Automatisk avemballering av pall Skrevet av Marie Stensvoll og Sondre Wollum Hansen Ingeniørfag - maskin IRM37516 vår 2017 B17M01 Forord I forbindelse med emnet IRM37516 skal det skrives
Forprosjektrapport Automatisk avemballering av pall Skrevet av Marie Stensvoll og Sondre Wollum Hansen Ingeniørfag - maskin IRM37516 vår 2017 B17M01 Forord I forbindelse med emnet IRM37516 skal det skrives
MONTERINGS- OG BRUKSANVISNING FOR GARASJEPORTÅPNER
 MONTERINGS- OG BRUKSANVISNING FOR GARASJEPORTÅPNER Vennligst les denne manualen nøye før du installerer Innhold A. Deleliste.. 2 B. Funksjoner.. 3 C. Montering.. 4 D. Fjernkontroll og design.. 7 E. Programmering..
MONTERINGS- OG BRUKSANVISNING FOR GARASJEPORTÅPNER Vennligst les denne manualen nøye før du installerer Innhold A. Deleliste.. 2 B. Funksjoner.. 3 C. Montering.. 4 D. Fjernkontroll og design.. 7 E. Programmering..
INNHOLDSFORTEGNELSE.
 INNHOLDSFORTEGNELSE. 1. Beskrivelse av betjeningspanel.... 2 1.1 Funksjoner... 2 1.2 Beskrivelse av funksjoner... 2 1.3 Betjenings funksjons parametere.... 5 1.3.2 Sagblad hastighet....5 1.3.3 Kjølevæske
INNHOLDSFORTEGNELSE. 1. Beskrivelse av betjeningspanel.... 2 1.1 Funksjoner... 2 1.2 Beskrivelse av funksjoner... 2 1.3 Betjenings funksjons parametere.... 5 1.3.2 Sagblad hastighet....5 1.3.3 Kjølevæske
Forprosjekt. Oppgavens tittel: Motorstyring Dato: 24.01.05. Jon Digernes Institutt/studieretning: Program for elektro og datateknikk
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro-og datateknikk 7004 TRONDHEIM Forprosjekt Oppgavens tittel: Motorstyring Dato: 24.01.05 Project title: Gruppedeltakere: Sverre Hamre
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro-og datateknikk 7004 TRONDHEIM Forprosjekt Oppgavens tittel: Motorstyring Dato: 24.01.05 Project title: Gruppedeltakere: Sverre Hamre
ELE610 Prosjekter i robotteknikk, vår 2017.
 Stavanger, 30. november 2016 Det teknisknaturvitenskapelige fakultet ELE610 Prosjekter i robotteknikk, vår 2017. RobotStudio-del, oppgave 3. For denne tredje RobotStudio oppgaven skal dere etter hvert
Stavanger, 30. november 2016 Det teknisknaturvitenskapelige fakultet ELE610 Prosjekter i robotteknikk, vår 2017. RobotStudio-del, oppgave 3. For denne tredje RobotStudio oppgaven skal dere etter hvert
BRUKERMANUAL NORSK 2011 EMS-56/EMS-57
 BRUKERMANUAL NORSK 2011 EMS-56/EMS-57 1 Vidhaugen 114 7550 Hommelvik Norway Tele: +47 73979017 E-mail: post@tgelectronics.no Web: www.tgelectronics.no TG Electronics/ Beckmann GmbH er ikke ansvarlig overfor
BRUKERMANUAL NORSK 2011 EMS-56/EMS-57 1 Vidhaugen 114 7550 Hommelvik Norway Tele: +47 73979017 E-mail: post@tgelectronics.no Web: www.tgelectronics.no TG Electronics/ Beckmann GmbH er ikke ansvarlig overfor
Eksempel på endring av funksjon Tast Display Forklaring. Det nåværende funksjonsnummer vises på displayet.
 8.0 Flex Counter omdreiningsteller og balleteller 8.1 Innledning Flex Counter er et instrument med mange muligheter. Selve enheten består av en boks med et display og to betjeningstaster. Både display
8.0 Flex Counter omdreiningsteller og balleteller 8.1 Innledning Flex Counter er et instrument med mange muligheter. Selve enheten består av en boks med et display og to betjeningstaster. Både display
FluidSIM 5 Raskere, større og tilgjengelig overalt
 FluidSIM 5 Raskere, større og tilgjengelig overalt Revolusjonerende: Nye FluidSIM 5 Ett FluidSIM dekker alle behov: P, H og E i samme simulering Nytt konsept: Kun ett FluidSIM for alle teknologier og opplæringspakker
FluidSIM 5 Raskere, større og tilgjengelig overalt Revolusjonerende: Nye FluidSIM 5 Ett FluidSIM dekker alle behov: P, H og E i samme simulering Nytt konsept: Kun ett FluidSIM for alle teknologier og opplæringspakker
SolidPlant er perfekt for deg som jobber med design av rørsystemer og anlegg, og er kjent med SolidWorks.
 SolidPlant, det eneste virkelig spesifikasjonsstyrte anleggsdesign programmet for SolidWorks. Ved å kombinere intuitive parametrisk styrte SolidWorks med en sofistikert database for å generere alle komponenter
SolidPlant, det eneste virkelig spesifikasjonsstyrte anleggsdesign programmet for SolidWorks. Ved å kombinere intuitive parametrisk styrte SolidWorks med en sofistikert database for å generere alle komponenter
Mars Robotene (5. 7. trinn)
") Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
FORPROSJEKTRAPPORT FOR BACHELOROPPGAVE
 FORPROSJEKTRAPPORT FOR BACHELOROPPGAVE VR fremtidens standardverktøy B18M06: Stian Tharaldsen, Jonas Vetle Bech Fjeldberg, Andreas Jakobsen og Ståle Eiklid Moen Vår 2018 Bachelorstudium i ingeniørfag -
FORPROSJEKTRAPPORT FOR BACHELOROPPGAVE VR fremtidens standardverktøy B18M06: Stian Tharaldsen, Jonas Vetle Bech Fjeldberg, Andreas Jakobsen og Ståle Eiklid Moen Vår 2018 Bachelorstudium i ingeniørfag -
BRUKSANVISNING OG MONTERING
 GARASJEPORTÅPNER 6710310200 BRUKSANVISNING OG MONTERING BRUKSANVISNING I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde 1 Skiftenøkkel/fastnøkler
GARASJEPORTÅPNER 6710310200 BRUKSANVISNING OG MONTERING BRUKSANVISNING I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde 1 Skiftenøkkel/fastnøkler
Forprosjektrapport. Gruppe 34. Magnus Dahl Hegge s153549
 Forprosjektrapport Gruppe 34 Bjørn Bergan Abdi Baisa Mads Larsen s161593 s156140 s156151 Magnus Dahl Hegge s153549 Presentasjon Hovedprosjektgruppe 34 består av 4 elever som nå gjennomfører sitt siste
Forprosjektrapport Gruppe 34 Bjørn Bergan Abdi Baisa Mads Larsen s161593 s156140 s156151 Magnus Dahl Hegge s153549 Presentasjon Hovedprosjektgruppe 34 består av 4 elever som nå gjennomfører sitt siste
En bedre måte å håndtere prosjekt, team, oppgaver og innhold
 En bedre måte å håndtere prosjekt, team, oppgaver og innhold Bedre prosjekthå ndtering med metådåtå M-Files går langt utover bare enkel dokumenthåndtering. Den unike arkitekturen drevet av metadata lar
En bedre måte å håndtere prosjekt, team, oppgaver og innhold Bedre prosjekthå ndtering med metådåtå M-Files går langt utover bare enkel dokumenthåndtering. Den unike arkitekturen drevet av metadata lar
Knut Styve Hornnes, Stig Løvlund, Jonas Lindholm (alle Statnett)
") STORSKALA LASTSTYRING I NORD-NORGE Knut Styve Hornnes, Stig Løvlund, Jonas Lindholm (alle Statnett) Sammendrag Prosjektet Storskala Laststyring er en del av satsingen innenfor forskningsprogrammet Smarte
STORSKALA LASTSTYRING I NORD-NORGE Knut Styve Hornnes, Stig Løvlund, Jonas Lindholm (alle Statnett) Sammendrag Prosjektet Storskala Laststyring er en del av satsingen innenfor forskningsprogrammet Smarte
1 Forord. Kravspesifikasjon
 [Type text] [Type text] 3/5 Hovedprosjekt ingeniørutdanningen 09 Kravspesifikasjon Tittel på hovedprosjektet Tarantell Dashboard Gruppe 28 Bjørn Ove Pedersen Stian Dalviken Antall sider 6 Intern veileder
[Type text] [Type text] 3/5 Hovedprosjekt ingeniørutdanningen 09 Kravspesifikasjon Tittel på hovedprosjektet Tarantell Dashboard Gruppe 28 Bjørn Ove Pedersen Stian Dalviken Antall sider 6 Intern veileder
Programvareutvikling (store systemer)
") Programvareutvikling (store systemer) Software Engineering Nils-Olav Skeie Associate Professor, PhD Page 1 Agenda Bakgrunn, Programvareutvikling, Prosess, Analyse, Design, Koding, Testing CARGOMASTER,
Programvareutvikling (store systemer) Software Engineering Nils-Olav Skeie Associate Professor, PhD Page 1 Agenda Bakgrunn, Programvareutvikling, Prosess, Analyse, Design, Koding, Testing CARGOMASTER,
Forprosjekt. Oppgdragsgiver Unikia, Lille grensen 7, 0159 Oslo, Kontaktperson Anders Kose Nervold,
 Hovedprosjekt i data/informasjonsteknologi Høgskolen i Oslo og Akershus Forprosjekt Prosjekttittel Unikia Android applikasjon Gruppe 13 Markus Bugge-Hundere s188909 Morten Wold Aksel Wiig s236326 s232324
Hovedprosjekt i data/informasjonsteknologi Høgskolen i Oslo og Akershus Forprosjekt Prosjekttittel Unikia Android applikasjon Gruppe 13 Markus Bugge-Hundere s188909 Morten Wold Aksel Wiig s236326 s232324
Prosjekt oppgaven var en ide av Valdemar Finanger, en effekttest av batterier.
 Sammendrag Denne rapporten er et forprosjekt til hovedprosjekt nr.ee0705 gitt av Høgskolen i Sør-Trøndelag ved Valdemar Finanger. Prosjektets oppgave er å konstruere og videreutvikle en mikrokontrollerstyrt
Sammendrag Denne rapporten er et forprosjekt til hovedprosjekt nr.ee0705 gitt av Høgskolen i Sør-Trøndelag ved Valdemar Finanger. Prosjektets oppgave er å konstruere og videreutvikle en mikrokontrollerstyrt
Dokument 1 - Sammendrag
 Dokument 1 - Sammendrag Automatnett - Nytt CMS-verktøy for Uno-X Automat Fakultet for teknologi, kunst og design Høgskolen i Oslo og Akershus, 2013 Innholdsfortegnelse Sammendrag 1 1. Innledning 1 2. Om
Dokument 1 - Sammendrag Automatnett - Nytt CMS-verktøy for Uno-X Automat Fakultet for teknologi, kunst og design Høgskolen i Oslo og Akershus, 2013 Innholdsfortegnelse Sammendrag 1 1. Innledning 1 2. Om
Versjon 1.2 støtter bruk av Revit 2020.
 Versjon 1.2 støtter bruk av Revit 2020. Når brukere gjør endringer oå objekter etter at ISY attributter er lagt på må mengdene oppdateres. Ved å trykke på lagre og/ eller ved lukking av fil får brukerne
Versjon 1.2 støtter bruk av Revit 2020. Når brukere gjør endringer oå objekter etter at ISY attributter er lagt på må mengdene oppdateres. Ved å trykke på lagre og/ eller ved lukking av fil får brukerne
ENC - 100. ENKEL AKSE og KLIPPE LENGDE KONTROLLER for PLATESAKSER
 ENC - 100 ENKEL AKSE og KLIPPE LENGDE KONTROLLER for PLATESAKSER 1. GENERELLE SPESIFIKASJONER Membran tastatur med lang levetid. Klart og lett lesbart display. Viser hver av de 6 sifrene for aktuell og
ENC - 100 ENKEL AKSE og KLIPPE LENGDE KONTROLLER for PLATESAKSER 1. GENERELLE SPESIFIKASJONER Membran tastatur med lang levetid. Klart og lett lesbart display. Viser hver av de 6 sifrene for aktuell og
Presse Serie. Det Profesjonelle Valg
 V6 Presse Serie Det Profesjonelle Valg 1 Våre Spesifikasjoner 1. Splittet Girkasse Den venstre siden av girkassen driver beltene og rullene i pressekammeret, mens den høyre siden driver pickupen og kutteren.
V6 Presse Serie Det Profesjonelle Valg 1 Våre Spesifikasjoner 1. Splittet Girkasse Den venstre siden av girkassen driver beltene og rullene i pressekammeret, mens den høyre siden driver pickupen og kutteren.
Testrapport Prosjekt nr. 2011-22 Det Norske Veritas
 Prosjekt nr. 2011 22 Testrapport Hovedprosjektets tittel Implementering av plugin og utvikling av wizard for Det Norske Veritas Prosjektdeltakere Magnus Strand Nekstad s156159 Jørgen Rønbeck s135779 Dato
Prosjekt nr. 2011 22 Testrapport Hovedprosjektets tittel Implementering av plugin og utvikling av wizard for Det Norske Veritas Prosjektdeltakere Magnus Strand Nekstad s156159 Jørgen Rønbeck s135779 Dato
innovative velger Noca
 De innovative velger Noca Noca industrialiserer og produserer elektronikk som skal høyt opp og langt ned. Noe skal inn i satellitter i verdensrommet og noe skal inn i utstyr på dypt vann. Produkter fra
De innovative velger Noca Noca industrialiserer og produserer elektronikk som skal høyt opp og langt ned. Noe skal inn i satellitter i verdensrommet og noe skal inn i utstyr på dypt vann. Produkter fra
Gruppe 43. Hoved-Prosjekt Forprosjekt
 Gruppe 43 Hoved-Prosjekt Forprosjekt Mobil Applikasjon Utvikling HiOA Bacheloroppgave forprosjekt våren 2017 Presentasjon Gruppen består av: Gebi Beshir Ole-Kristian Steiro Tasmia Faruque s182414 s189141
Gruppe 43 Hoved-Prosjekt Forprosjekt Mobil Applikasjon Utvikling HiOA Bacheloroppgave forprosjekt våren 2017 Presentasjon Gruppen består av: Gebi Beshir Ole-Kristian Steiro Tasmia Faruque s182414 s189141
Motorstyring, intet problem
 Sikkerhetsbrosjyre 2014 Motorstyring, intet problem AS-i motormoduler for AC-motorer AS-i slave for SEW-frekvensomformere med M12-kontakter og beskyttelsesklasse IP65 tillater datautveksling og parametrisering
Sikkerhetsbrosjyre 2014 Motorstyring, intet problem AS-i motormoduler for AC-motorer AS-i slave for SEW-frekvensomformere med M12-kontakter og beskyttelsesklasse IP65 tillater datautveksling og parametrisering
Hovedprosjekt 2014, Høgskolen i Oslo og Akershus
 Forprosjektrapport Gruppe 2 Hovedprosjekt 2014, Høgskolen i Oslo og Akershus 1 INNHOLD 2 Presentasjon... 2 2.1 Gruppen medlemmer... 2 2.2 Oppgave... 2 2.3 Oppdragsgiver... 2 2.4 Veileder... 2 3 Sammendrag...
Forprosjektrapport Gruppe 2 Hovedprosjekt 2014, Høgskolen i Oslo og Akershus 1 INNHOLD 2 Presentasjon... 2 2.1 Gruppen medlemmer... 2 2.2 Oppgave... 2 2.3 Oppdragsgiver... 2 2.4 Veileder... 2 3 Sammendrag...
Markedets mest intelligente sikring av nødstrøm
 BMS Battery Management Systems Markedets mest intelligente sikring av nødstrøm BMS overvåker: Cellespenninger Temperaturer Mellomforbindelser BMS analyserer: Batteriets tilstand Cellens gjenværende levetid
BMS Battery Management Systems Markedets mest intelligente sikring av nødstrøm BMS overvåker: Cellespenninger Temperaturer Mellomforbindelser BMS analyserer: Batteriets tilstand Cellens gjenværende levetid
Veiledning og vurdering av Bacheloroppgave for Informasjonsbehandling
 Veiledning og vurdering av Bacheloroppgave for Informasjonsbehandling Oppdatert 15. jan. 2014, Svend Andreas Horgen (studieleder Informasjonsbehandling og itfag.hist.no) Her er noen generelle retningslinjer
Veiledning og vurdering av Bacheloroppgave for Informasjonsbehandling Oppdatert 15. jan. 2014, Svend Andreas Horgen (studieleder Informasjonsbehandling og itfag.hist.no) Her er noen generelle retningslinjer
Presentasjon 2 Gruppe 2 Oppgave 2 Oppdragsgiver 2. Sammendrag 3. Dagens situasjon 3 ServiceNow 3 Coop 3. Mål og rammebetingelser 3 Mål 3 Teknologier 4
 Forprosjektrapport Bachelorprosjekt for gruppe 8, våren 2017 Innholdsfortegnelse Presentasjon 2 Gruppe 2 Oppgave 2 Oppdragsgiver 2 Sammendrag 3 Dagens situasjon 3 ServiceNow 3 Coop 3 Mål og rammebetingelser
Forprosjektrapport Bachelorprosjekt for gruppe 8, våren 2017 Innholdsfortegnelse Presentasjon 2 Gruppe 2 Oppgave 2 Oppdragsgiver 2 Sammendrag 3 Dagens situasjon 3 ServiceNow 3 Coop 3 Mål og rammebetingelser
JA-82K OASiS Enkel oppstart
 JA-82K OASiS Enkel oppstart Installering av dette systemet skal bare gjøres av autorisert montør. Produsent / importør kan ikke gjøres ansvarlig for noen skade eller konsekvens relatert til feilaktig montering
JA-82K OASiS Enkel oppstart Installering av dette systemet skal bare gjøres av autorisert montør. Produsent / importør kan ikke gjøres ansvarlig for noen skade eller konsekvens relatert til feilaktig montering
Omgivelseskontroll. Dokumentasjon for Picomatic DA300 døråpner
 Omgivelseskontroll Dokumentasjon for Picomatic DA300 døråpner Brokelandsheia, 4993 Sundebru, Tlf +47 3711 9950 Fax +47 3711 9951 E-mail: firmapost@picomed.no Foretaksnr 962 211 631 MVA Revisjonsoversikt
Omgivelseskontroll Dokumentasjon for Picomatic DA300 døråpner Brokelandsheia, 4993 Sundebru, Tlf +47 3711 9950 Fax +47 3711 9951 E-mail: firmapost@picomed.no Foretaksnr 962 211 631 MVA Revisjonsoversikt
Veiledning og vurdering av Bacheloroppgave for Informasjonsbehandling
 Veiledning og vurdering av Bacheloroppgave for Informasjonsbehandling Oppdatert 2. nov. 2017, Leif Erik Opland (programansvarlig Informasjonsbehandling og itfag.no) Her er noen generelle retningslinjer
Veiledning og vurdering av Bacheloroppgave for Informasjonsbehandling Oppdatert 2. nov. 2017, Leif Erik Opland (programansvarlig Informasjonsbehandling og itfag.no) Her er noen generelle retningslinjer
LÆREPLAN I PROSJEKT TIL FORDYPNING FOR VG1 ELEKTROFAG
 LÆREPLAN I PROSJEKT TIL FORDYPNING FOR VG1 ELEKTROFAG Data og Elektronikk, Dataelektronikker. 1. FORMÅLET MED OPPLÆRINGEN Prosjekt til fordypning skal gi elevene mulighet til å prøve ut enkelte eller flere
LÆREPLAN I PROSJEKT TIL FORDYPNING FOR VG1 ELEKTROFAG Data og Elektronikk, Dataelektronikker. 1. FORMÅLET MED OPPLÆRINGEN Prosjekt til fordypning skal gi elevene mulighet til å prøve ut enkelte eller flere
Kjennetegn. Enhetlig skriveradministrasjon Utskriftspolicy Produktbasert jobbehandling Administrasjon av utskriftskø APPLIKASJONER.
 Utskriftsstyring Kjennetegn Enhetlig skriveradministrasjon Utskriftspolicy Produktbasert jobbehandling Administrasjon av utskriftskø APPLIKASJONER Utskriftsstyring Fargestyring Web til utskrift Variabel
Utskriftsstyring Kjennetegn Enhetlig skriveradministrasjon Utskriftspolicy Produktbasert jobbehandling Administrasjon av utskriftskø APPLIKASJONER Utskriftsstyring Fargestyring Web til utskrift Variabel
Forprosjekt bachelor-oppgave 2012
 Forprosjekt bachelor-oppgave 2012 Oppgave nr. 4.- Styring av instrumenter. Skrevet av Jan Ingar Sethre. 1 Innhold 1. Mål og rammer... 3 1.1 Bakgrunn... 3 1.2 Mål for prosjektet... 3 1.3 Rammer og forutsetninger...
Forprosjekt bachelor-oppgave 2012 Oppgave nr. 4.- Styring av instrumenter. Skrevet av Jan Ingar Sethre. 1 Innhold 1. Mål og rammer... 3 1.1 Bakgrunn... 3 1.2 Mål for prosjektet... 3 1.3 Rammer og forutsetninger...
Øyvind A. Landsnes, 26. august 2013
 Øyvind A. Landsnes, 26. august Forenklet robotprogrammering Forenklet robotprogrammering Øyvind A. Landsnes Global System Architect ABB AS, Robotics E-mail: oeyvind.landsnes@no.abb.com Telephone: +47 51
Øyvind A. Landsnes, 26. august Forenklet robotprogrammering Forenklet robotprogrammering Øyvind A. Landsnes Global System Architect ABB AS, Robotics E-mail: oeyvind.landsnes@no.abb.com Telephone: +47 51
Forprosjektrapport. Bachelorprosjekt i informasjonsteknologi ved Høgskolen i Oslo og Akershus, våren Digitalisering av Sentralen UNG Gründer
 Forprosjektrapport Bachelorprosjekt i informasjonsteknologi ved Høgskolen i Oslo og Akershus, våren 207 Digitalisering av Sentralen UNG Gründer Gruppe 34 Kenneth Di Vita Jensen, s236745 Frank Arne Bjørkmann
Forprosjektrapport Bachelorprosjekt i informasjonsteknologi ved Høgskolen i Oslo og Akershus, våren 207 Digitalisering av Sentralen UNG Gründer Gruppe 34 Kenneth Di Vita Jensen, s236745 Frank Arne Bjørkmann
Intek Engineering. av INTEK. v/erling Hovde
 Intek Engineering Møt fremtiden Presentasjon med ny teknologi og et tilgjengelig kompetansemiljø av INTEK v/erling Hovde Visjon INTEK skal være et ledende kunnskapssenter innen industriell automasjon og
Intek Engineering Møt fremtiden Presentasjon med ny teknologi og et tilgjengelig kompetansemiljø av INTEK v/erling Hovde Visjon INTEK skal være et ledende kunnskapssenter innen industriell automasjon og
Statusrapport for HiN Hovedoppgave 2007 Bachelor i ingeniørfag
 Statusrapport for HiN Hovedoppgave 2007 Bachelor i ingeniørfag Lodve Langes gate 2, Postboks 385 8505 NARVIK Telefon: 76 96 60 00 Telefax: 76 96 68 10 Tittel & nummer Plan/visualisering av sikkerhetsområde
Statusrapport for HiN Hovedoppgave 2007 Bachelor i ingeniørfag Lodve Langes gate 2, Postboks 385 8505 NARVIK Telefon: 76 96 60 00 Telefax: 76 96 68 10 Tittel & nummer Plan/visualisering av sikkerhetsområde
Forprosjektrapport for Agresso R&D Ansettelsessystem 31.01.07. Hovedprosjekt våren 2007. Skrevet av:
 Forprosjektrapport for Agresso R&D Ansettelsessystem Hovedprosjekt våren 2007 31.01.07 Skrevet av: Anders Hartvoll Ruud Christian Årving Leif Martin Næss Sahdia Fayyaz Moghal 1 Sammendrag Prosjektittel:
Forprosjektrapport for Agresso R&D Ansettelsessystem Hovedprosjekt våren 2007 31.01.07 Skrevet av: Anders Hartvoll Ruud Christian Årving Leif Martin Næss Sahdia Fayyaz Moghal 1 Sammendrag Prosjektittel:
Brukermanual. Tastatur.
 Brukermanual ICAS Daglig bruk av sentralen Brannalarmen er aktiv til enhver tid og behøver ikke programmeres for gi alarm ved røykutvikling eller branntilløp. Innbruddsalarmen slås på ved å taste master-koden,
Brukermanual ICAS Daglig bruk av sentralen Brannalarmen er aktiv til enhver tid og behøver ikke programmeres for gi alarm ved røykutvikling eller branntilløp. Innbruddsalarmen slås på ved å taste master-koden,
Forprosjekt Hovedprosjekt ved Høgskolen i Oslo Våren 2008
 Forprosjekt Hovedprosjekt ved Høgskolen i Oslo Våren 2008 Skrevet av Ole Myrbakken, Fadima Mohamoud, Orji Okoroafor, Karen Arrendondo Side 1 PRESENTASJON Prosjekt tittel: Prosjektperiode: MetaGen 7.jan
Forprosjekt Hovedprosjekt ved Høgskolen i Oslo Våren 2008 Skrevet av Ole Myrbakken, Fadima Mohamoud, Orji Okoroafor, Karen Arrendondo Side 1 PRESENTASJON Prosjekt tittel: Prosjektperiode: MetaGen 7.jan
VERSA. Brukermanual kortversjon
 VERSA kortversjon Det tas forbehold om mulige feil i manualen og Noby AS påberoper seg rettigheten til å gjøre endringer på produkt så vel som i manual uten forutgående varsel. Manual nr.: Mversa101 INNHOLDSFORTEGNELSE
VERSA kortversjon Det tas forbehold om mulige feil i manualen og Noby AS påberoper seg rettigheten til å gjøre endringer på produkt så vel som i manual uten forutgående varsel. Manual nr.: Mversa101 INNHOLDSFORTEGNELSE
Industrielle IT- løsninger.
 Industrielle IT- løsninger. Introduksjon Nordkontakt AS er en ingeniørbedrift med automasjon og informasjonsteknologi som spesialområde. Vi leverer produkter og tjenester på alle nivå i foredlingsprosessen,
Industrielle IT- løsninger. Introduksjon Nordkontakt AS er en ingeniørbedrift med automasjon og informasjonsteknologi som spesialområde. Vi leverer produkter og tjenester på alle nivå i foredlingsprosessen,
BAAN IVc. BAAN Data Navigator - Brukerhåndbok
 BAAN IVc BAAN Data Navigator - Brukerhåndbok Utgitt av: Baan Development B.V. P.O.Box 143 3770 AC Barneveld The Netherlands Trykt i Nederland Baan Development B.V. 1997. Med enerett. Informasjonen i dette
BAAN IVc BAAN Data Navigator - Brukerhåndbok Utgitt av: Baan Development B.V. P.O.Box 143 3770 AC Barneveld The Netherlands Trykt i Nederland Baan Development B.V. 1997. Med enerett. Informasjonen i dette
PR362009 24. november 2009 Programvare, pc-basert kontroll Side 1 av 5
 Programvare, pc-basert kontroll Side 1 av 5 IT-standarder: TwinCAT-programmeringsmiljø integreres i Microsoft Visual Studio TwinCAT 3 extended Automation Med TwinCAT 3 introduserer Beckhoff sin nye generasjon
Programvare, pc-basert kontroll Side 1 av 5 IT-standarder: TwinCAT-programmeringsmiljø integreres i Microsoft Visual Studio TwinCAT 3 extended Automation Med TwinCAT 3 introduserer Beckhoff sin nye generasjon
Kandidat nr. 1, 2 og 3
 Kandidat nr. 1, 2 og 3 Rapport 1 IT202E Bacheloroppgave i Informatikk Vår 2011 Mobilapplikasjonsutvikling med Scrum 1 Innhold Innledning... 3 Overordnet Prosjektplan... 3 Produktbacklog... 5 Sprint planning
Kandidat nr. 1, 2 og 3 Rapport 1 IT202E Bacheloroppgave i Informatikk Vår 2011 Mobilapplikasjonsutvikling med Scrum 1 Innhold Innledning... 3 Overordnet Prosjektplan... 3 Produktbacklog... 5 Sprint planning
Brannventilen kan leveres med microbrytere som indikerer åpen/lukket posisjon av ventilhodet.
 BRANNVENTIL EIS 60 BRANN SIKKERHET parametric libraries FUNKSJON BX-1H Brannventil er utviklet for bruk i alle typer bygninger hvor det er behov for separat avtrekk i egen brann celle. Brannventilen benyttes
BRANNVENTIL EIS 60 BRANN SIKKERHET parametric libraries FUNKSJON BX-1H Brannventil er utviklet for bruk i alle typer bygninger hvor det er behov for separat avtrekk i egen brann celle. Brannventilen benyttes
Gruppelogg for hovedprosjekt 2009
 Gruppelogg for hovedprosjekt 2009 Før det endelige valget på prosjektet ble tatt brukte gruppen en del tid på å finne forskjellige muligheter for oppgaveemner. Det ble blant annet kontaktet Hafslund produksjon
Gruppelogg for hovedprosjekt 2009 Før det endelige valget på prosjektet ble tatt brukte gruppen en del tid på å finne forskjellige muligheter for oppgaveemner. Det ble blant annet kontaktet Hafslund produksjon
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Studieprogram for elektro- og datateknikk 7004 TRONDHEIM. Antall Sider/bilag: 17 / 8 Gruppedeltakere:
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Studieprogram for elektro- og datateknikk 7004 TRONDHEIM Forprosjektrapport Oppgaves tittel: Interaktiv Robot Gitt dato: 07.09.2009 Innleveringsdato: 28.09.2009
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Studieprogram for elektro- og datateknikk 7004 TRONDHEIM Forprosjektrapport Oppgaves tittel: Interaktiv Robot Gitt dato: 07.09.2009 Innleveringsdato: 28.09.2009
VURDERING AV PRØVEARBEIDET
 VURDERING AV PRØVEARBEIDET Kandidat: Bedrift/Prøvested: FORKLARING KOMPETANSEMÅL: Kompetansemålene (K.NR.) Produksjonsteknikk A1 A14 og B. Kvalitet og dokumentasjon B1 B8 til sammen 22 kompetansemål DU
VURDERING AV PRØVEARBEIDET Kandidat: Bedrift/Prøvested: FORKLARING KOMPETANSEMÅL: Kompetansemålene (K.NR.) Produksjonsteknikk A1 A14 og B. Kvalitet og dokumentasjon B1 B8 til sammen 22 kompetansemål DU
Team2 Requirements & Design Document Værsystem
 Requirements & Design Document Høgskolen i Sørøst-Norge Fakultet for teknologi, naturvitenskap og maritime fag Institutt for elektro, IT og kybernetikk SRD 22/01/2018 Systemutvikling og dokumentasjon/ia4412
Requirements & Design Document Høgskolen i Sørøst-Norge Fakultet for teknologi, naturvitenskap og maritime fag Institutt for elektro, IT og kybernetikk SRD 22/01/2018 Systemutvikling og dokumentasjon/ia4412
Bormaskin MDU 3065. www.akutt.info
 www.akutt.info Bormaskin MDU 3065 Vi har gleden av å tilby Pentruder MDU borrmotor - NTGRA. Denne motoren gir deg en komplett løsning innen kjerneboring. Denne maskinen er første generasjon maskin med
www.akutt.info Bormaskin MDU 3065 Vi har gleden av å tilby Pentruder MDU borrmotor - NTGRA. Denne motoren gir deg en komplett løsning innen kjerneboring. Denne maskinen er første generasjon maskin med
Kravspesifikasjon MetaView
 Kravspesifikasjon MetaView BACHELOROPPGAVE VÅREN 2014 1. Presentasjon Tittel: MetaView Oppgave: Lage en applikasjon og api som skal kommunisere med MetaVision slik at det skal bli enklere for leger og
Kravspesifikasjon MetaView BACHELOROPPGAVE VÅREN 2014 1. Presentasjon Tittel: MetaView Oppgave: Lage en applikasjon og api som skal kommunisere med MetaVision slik at det skal bli enklere for leger og
Forord Dette er testdokumentasjonen skrevet i forbindelse med hovedprosjekt ved Høgskolen i Oslo våren 2010.
 TESTDOKUMENTASJON Forord Dette er testdokumentasjonen skrevet i forbindelse med hovedprosjekt ved Høgskolen i Oslo våren 2010. Dokumentet beskriver hvordan applikasjonen er testet. Dokumentet er beregnet
TESTDOKUMENTASJON Forord Dette er testdokumentasjonen skrevet i forbindelse med hovedprosjekt ved Høgskolen i Oslo våren 2010. Dokumentet beskriver hvordan applikasjonen er testet. Dokumentet er beregnet
HOVEDPROSJEKT 2010 - HIO IU - DATA FORPROSJEKTRAPPORT GRUPPE 18
 HOVEDPROSJEKT 2010 - HIO IU - DATA FORPROSJEKTRAPPORT GRUPPE 18 INNHOLDSFORTEGNELSE 1. PRESENTASJON 2. SAMMENDRAG 3. DAGENS SITUASJON 4. MÅL OG RAMMEBETINGELSER 5. LØSNINGER \ ALTERNATIVER 6. ANALYSE AV
HOVEDPROSJEKT 2010 - HIO IU - DATA FORPROSJEKTRAPPORT GRUPPE 18 INNHOLDSFORTEGNELSE 1. PRESENTASJON 2. SAMMENDRAG 3. DAGENS SITUASJON 4. MÅL OG RAMMEBETINGELSER 5. LØSNINGER \ ALTERNATIVER 6. ANALYSE AV
Generelt om operativsystemer
 Generelt om operativsystemer Hva er problemet? Styring av maskinvare og ressurser tilknyttet en datamaskin er komplisert, detaljert og vanskelig Maskinvare, komponenter og programvare endres og forbedres
Generelt om operativsystemer Hva er problemet? Styring av maskinvare og ressurser tilknyttet en datamaskin er komplisert, detaljert og vanskelig Maskinvare, komponenter og programvare endres og forbedres
Innhold Forord...3 Begreper og akronymer...4 Systembeskrivelse...5 Generelt...5 Funksjonelle krav...7 Ikke-Funksjonelle krav...9 Prioritering...
 Innhold Forord...3 Begreper og akronymer...4 Systembeskrivelse...5 Generelt...5 Funksjonelle krav...7 Ikke-Funksjonelle krav...9 Prioritering...9 2 Forord Denne kravspesifikasjonen har blitt utviklet i
Innhold Forord...3 Begreper og akronymer...4 Systembeskrivelse...5 Generelt...5 Funksjonelle krav...7 Ikke-Funksjonelle krav...9 Prioritering...9 2 Forord Denne kravspesifikasjonen har blitt utviklet i
BORBESKYTTER FOR EN RØRHENGER SAMT ANVENDELSE AV DENNE.
 BORBESKYTTER FOR EN RØRHENGER SAMT ANVENDELSE AV DENNE. 5 Oppfinnelsens område Den foreliggende oppfinnelsen gjelder boring etter og produksjon av hydrokarboner fra brønner som befinner seg under vann.
BORBESKYTTER FOR EN RØRHENGER SAMT ANVENDELSE AV DENNE. 5 Oppfinnelsens område Den foreliggende oppfinnelsen gjelder boring etter og produksjon av hydrokarboner fra brønner som befinner seg under vann.
Matindustriens Opplæringskontor i Oslo og Akershus OPPLÆRINGSBOK FOR INDUSTRIMEKANIKERFAGET
 Matindustriens Opplæringskontor i Oslo og Akershus OPPLÆRINGSBOK FOR INDUSTRIMEKANIKERFAGET Gjennomføringsskjema for opplæring i bedrift Industrimekanikerfaget Lærlingens navn: Bedriftens navn: Læretid:
Matindustriens Opplæringskontor i Oslo og Akershus OPPLÆRINGSBOK FOR INDUSTRIMEKANIKERFAGET Gjennomføringsskjema for opplæring i bedrift Industrimekanikerfaget Lærlingens navn: Bedriftens navn: Læretid:
Bacheloroppgave, E1009. Oppgradering av industrirobot. forprosjekt
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro- og datateknikk 7004 TRONDHEIM Bacheloroppgave, E1009 Oppgradering av industrirobot forprosjekt HØGSKOLEN I SØR-TRØNDELAG Avdeling for
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Program for elektro- og datateknikk 7004 TRONDHEIM Bacheloroppgave, E1009 Oppgradering av industrirobot forprosjekt HØGSKOLEN I SØR-TRØNDELAG Avdeling for
SG/MG-grabber. Den perfekte kombinasjonen. Maksimer maskinens potensial med en skreddersydd grabb
 SG/MG-grabber Den perfekte kombinasjonen Maksimer maskinens potensial med en skreddersydd grabb En optimalisert grabb for hver tiltrotator Indexator Rototilt Systems har utviklet en ny generasjon multi-
SG/MG-grabber Den perfekte kombinasjonen Maksimer maskinens potensial med en skreddersydd grabb En optimalisert grabb for hver tiltrotator Indexator Rototilt Systems har utviklet en ny generasjon multi-
MONTERINGSANVISNING TERMLIFT
 MONTERINGSANVISNING TERMLIFT MONTERINGSANVISNING Før du setter i gang. For montering, bruk og vedlikehold av denne motoren pakken på en sikker måte, er det flere forutsetninger som må tas. For sikkerheten
MONTERINGSANVISNING TERMLIFT MONTERINGSANVISNING Før du setter i gang. For montering, bruk og vedlikehold av denne motoren pakken på en sikker måte, er det flere forutsetninger som må tas. For sikkerheten
Læringsutbyttebeskrivelse, Fredrikstad FagAkademi
 Navn på utdanningen Nettverksadministrator med design Navn på emnet Windows klient/skybasert klient programvare Nivå 5,1 Kandidaten har kunnskap om bruk og oppsett av gjeldende Windows operativsystem.
Navn på utdanningen Nettverksadministrator med design Navn på emnet Windows klient/skybasert klient programvare Nivå 5,1 Kandidaten har kunnskap om bruk og oppsett av gjeldende Windows operativsystem.
MONTERING AV FORSTERKERBRAKETT OG FESTEBRAKETT FOR GM 800 & GM1000 PORTÅPNERE TIL GRANDAL GARASJEPORTER
 1 2 3 4 MONTERING AV FORSTERKERBRAKETT OG FESTEBRAKETT FOR GM 800 & GM1000 PORTÅPNERE TIL GRANDAL GARASJEPORTER 5 Programmering og menyer for GM800 og GM1000 1. Før programmeringen starter må porten åpnes
1 2 3 4 MONTERING AV FORSTERKERBRAKETT OG FESTEBRAKETT FOR GM 800 & GM1000 PORTÅPNERE TIL GRANDAL GARASJEPORTER 5 Programmering og menyer for GM800 og GM1000 1. Før programmeringen starter må porten åpnes
MØTEREFERAT. Gruppe H09E03 E3E. DATO: 31. Mars 2009 TID: 10.00 12.00 STED: SealJet
 Gruppe H09E03 E3E DATO: 31. Mars 2009 TID: 10.00 12.00 STED: SealJet Bent-henning Nesse Sak 1: Introduksjon av prosjektet I den første timen var vi sammen med Hans Fredrik hvor han viste oss rundt fabrikken
Gruppe H09E03 E3E DATO: 31. Mars 2009 TID: 10.00 12.00 STED: SealJet Bent-henning Nesse Sak 1: Introduksjon av prosjektet I den første timen var vi sammen med Hans Fredrik hvor han viste oss rundt fabrikken
Tips! OMRON ELECTRONICS NORWAY AS
 Dette dokumentet er ment som et supplement til de originale manualene for produktene. Benytt derfor dette som en hjelp til å bli kjent med produktet, og ikke som en oppskrift for en ferdig installasjon.
Dette dokumentet er ment som et supplement til de originale manualene for produktene. Benytt derfor dette som en hjelp til å bli kjent med produktet, og ikke som en oppskrift for en ferdig installasjon.
Kravspesifikasjon. Leserveiledning Kravspesifikasjonen består av følgende deler: Presentasjon Om bedriften
 Kravspesifikasjon Presentasjon Hovedprosjektet gjennomføres ved Høgskolen i Oslo, avdelingen for ingeniørutdanning. Målet med oppgaven er å utvikle en online webshop for bestilling av postkasser. Dette
Kravspesifikasjon Presentasjon Hovedprosjektet gjennomføres ved Høgskolen i Oslo, avdelingen for ingeniørutdanning. Målet med oppgaven er å utvikle en online webshop for bestilling av postkasser. Dette
EGENVURDERINGSSKJEMA FOR BEDRIFTSDEL AUTOMATISERINGSFAGET.
 EGENVURDERINGSSKJEMA FOR BEDRIFTSDEL AUTOMATISERINGSFAGET. Navn:. Adresse:.... Tlf:.. Beskrivelse av programfagene Programfaget omfatter arbeid på produksjonsprosesser, maskiner og anlegg med tilhørende
EGENVURDERINGSSKJEMA FOR BEDRIFTSDEL AUTOMATISERINGSFAGET. Navn:. Adresse:.... Tlf:.. Beskrivelse av programfagene Programfaget omfatter arbeid på produksjonsprosesser, maskiner og anlegg med tilhørende
PROSJEKTBESKRIVELSE. Hovedprosjekt Standardisering av digitalisert landskapsinformasjon. (BIM for landskap)
") PROSJEKTBESKRIVELSE Hovedprosjekt Standardisering av digitalisert landskapsinformasjon (BIM for landskap) Innhold Bakgrunn... 2 Hovedoppgave... 2 Omfang og krav til leveranse... 4 Fremdrift... 4 Økonomi...
PROSJEKTBESKRIVELSE Hovedprosjekt Standardisering av digitalisert landskapsinformasjon (BIM for landskap) Innhold Bakgrunn... 2 Hovedoppgave... 2 Omfang og krav til leveranse... 4 Fremdrift... 4 Økonomi...
Forprosjektrapport. Hovedprosjekt Gruppe 15
 Forprosjektrapport Hovedprosjekt Gruppe 15 Erlend Gunnesen, Lars Sætaberget, Are Inglingstad, Marius Maudal 25.02.2014 Innholdsfortegnelse 1.Introduksjon... 2 1.1 Medlemmer:... 2 1.2 Oppdragsgiver:...
Forprosjektrapport Hovedprosjekt Gruppe 15 Erlend Gunnesen, Lars Sætaberget, Are Inglingstad, Marius Maudal 25.02.2014 Innholdsfortegnelse 1.Introduksjon... 2 1.1 Medlemmer:... 2 1.2 Oppdragsgiver:...
Produkt bygget opp av et sett av strenger og et dekke forbundet til strengene ved hjelp av en festeanordning
 1 Produkt bygget opp av et sett av strenger og et dekke forbundet til strengene ved hjelp av en festeanordning 0001 Oppfinnelsen omhandler et produkt bestående av et sett med tråder, holdt sammen av minst
1 Produkt bygget opp av et sett av strenger og et dekke forbundet til strengene ved hjelp av en festeanordning 0001 Oppfinnelsen omhandler et produkt bestående av et sett med tråder, holdt sammen av minst
Forprosjektrapport. Hovedprosjekt våren 2009. Gruppenr. H09E03. Bent-Henning Nesse Cheko Haji Abbasi Jon Espen Olsen
 Forprosjektrapport Hovedprosjekt våren 2009 Gruppenr. H09E03 Bent-Henning Nesse Cheko Haji Abbasi Jon Espen Olsen Styre- og loggsystem for en testjigg HØGSKOLEN I ØSTFOLD Avdeling for ingeniørfag Postadresse:
Forprosjektrapport Hovedprosjekt våren 2009 Gruppenr. H09E03 Bent-Henning Nesse Cheko Haji Abbasi Jon Espen Olsen Styre- og loggsystem for en testjigg HØGSKOLEN I ØSTFOLD Avdeling for ingeniørfag Postadresse:
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på:
 Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Læreplan i industrimontørfaget Vg3 / opplæring i bedrift
 Læreplan i industrimontørfaget Vg3 / opplæring i bedrift Fastsatt som forskrift av Utdanningsdirektoratet 14. desember 2007 etter delegasjon i brev av 26. september 2005 fra Utdannings- og forskningsdepartementet
Læreplan i industrimontørfaget Vg3 / opplæring i bedrift Fastsatt som forskrift av Utdanningsdirektoratet 14. desember 2007 etter delegasjon i brev av 26. september 2005 fra Utdannings- og forskningsdepartementet
TILBEHØR MED UBEGRENSET FLEKSIBILITET FOR GETINGE 46-SERIEN VASKEDEKONTAMINATORER
 TILBEHØR MED UBEGRENSET FLEKSIBILITET FOR GETINGE 46-SERIEN VASKEDEKONTAMINATORER Always Alltid med with deg you 2 Lasteutstyr Kombiner etter eget ønske Endre når du trenger det Instrumentsett og kurver
TILBEHØR MED UBEGRENSET FLEKSIBILITET FOR GETINGE 46-SERIEN VASKEDEKONTAMINATORER Always Alltid med with deg you 2 Lasteutstyr Kombiner etter eget ønske Endre når du trenger det Instrumentsett og kurver
Satmap Active 10 forklaring
 HURTIG MANUAL Satmap Active 10 forklaring GPS antenne SD Kort Utskiftbart front deksel Bærestropp Lysbryter Strøm ( Av og På) Tastatur (Drop in meny, som viser seg ved å trykke på dem) USB(strøm,data)
HURTIG MANUAL Satmap Active 10 forklaring GPS antenne SD Kort Utskiftbart front deksel Bærestropp Lysbryter Strøm ( Av og På) Tastatur (Drop in meny, som viser seg ved å trykke på dem) USB(strøm,data)
Brukermanual TS 1000. Versjon 5.05. Oktober 2012
 Brukermanual TS 1000 Versjon 5.05 Oktober 2012 Innhold 1. Daglig bruk av programmet... 3 Logg inn i programmet... 3 Legg inn ny kortbruker... 4 Slette kortbruker... 6 Slette kortbrukergruppe... 7 Endring
Brukermanual TS 1000 Versjon 5.05 Oktober 2012 Innhold 1. Daglig bruk av programmet... 3 Logg inn i programmet... 3 Legg inn ny kortbruker... 4 Slette kortbruker... 6 Slette kortbrukergruppe... 7 Endring
ABS Pumpestyring Automatikkskap CP114
 0825-0001 1 597 0825 NO 11.2012 Monterings- og bruksanvisning www.sulzer.com CP114 er et autoskap for tilkobling til enfaset strømtilførsel for 230 V/N/PE. m Strømkurs skal ha maks 16 A sikring. Hvis det
0825-0001 1 597 0825 NO 11.2012 Monterings- og bruksanvisning www.sulzer.com CP114 er et autoskap for tilkobling til enfaset strømtilførsel for 230 V/N/PE. m Strømkurs skal ha maks 16 A sikring. Hvis det
Saia PG5 2.0. Kjære kunde,
 Myrvoll 07.09.2009 Saia PG5 2.0 Kjære kunde, Etter en lang og intensiv periode med utvikling og testing, er det en glede å informere om at PG5 V2.0 er klar for distribusjon. I denne nye PG5 versjonen lanseres
Myrvoll 07.09.2009 Saia PG5 2.0 Kjære kunde, Etter en lang og intensiv periode med utvikling og testing, er det en glede å informere om at PG5 V2.0 er klar for distribusjon. I denne nye PG5 versjonen lanseres
ED 100 ED 250. Modulbasert slagdørsautomatikk
 ED 100 ED 250 Modulbasert slagdørsautomatikk ED 100 og ED 250 innhold ED 100 og ED 250 konfigurasjoner for ulike bruksområder til dører 4 5 Det modulbaserte systemet 6 7 For lett tilgjengelighet i inngangspartier
ED 100 ED 250 Modulbasert slagdørsautomatikk ED 100 og ED 250 innhold ED 100 og ED 250 konfigurasjoner for ulike bruksområder til dører 4 5 Det modulbaserte systemet 6 7 For lett tilgjengelighet i inngangspartier
Test av USB IO-enhet. Regulering og HMI.
 Høgskolen i Østfold Avdeling for informasjonsteknologi Lab Industriell IT Fag ITD 30005 Industriell IT Laboppgave 3. Gruppe-oppgave Test av USB IO-enhet. Regulering og HMI. Skal gjennomføres i løpet av
Høgskolen i Østfold Avdeling for informasjonsteknologi Lab Industriell IT Fag ITD 30005 Industriell IT Laboppgave 3. Gruppe-oppgave Test av USB IO-enhet. Regulering og HMI. Skal gjennomføres i løpet av
F-Secure Mobile Security for S60
 F-Secure Mobile Security for S60 1. Installasjon og aktivering Tidligere versjon Installasjon Du trenger ikke å avinstallere den tidligere versjonen av F-Secure Mobile Anti-Virus. Kontroller innstillingene
F-Secure Mobile Security for S60 1. Installasjon og aktivering Tidligere versjon Installasjon Du trenger ikke å avinstallere den tidligere versjonen av F-Secure Mobile Anti-Virus. Kontroller innstillingene
DML Intello. Teknisk spesifikasjon Målskisser Inn- og utganger Koblinger Tilbehør
 DML Intello Teknisk spesifikasjon Målskisser Inn- og utganger Koblinger Tilbehør DML Intello Teknisk spesifikasjon DORMA DML Intello motorlåser DORMA DML Intello er en ny serie med motorlåser som er en
DML Intello Teknisk spesifikasjon Målskisser Inn- og utganger Koblinger Tilbehør DML Intello Teknisk spesifikasjon DORMA DML Intello motorlåser DORMA DML Intello er en ny serie med motorlåser som er en
BRUKER MANUAL SWING GATE OPENER
 BRUKER MANUAL SWING GATE OPENER Viktig med hensyn til sikkerhet: 1. Kjennskap til relevante elektro-tekniske bestemmelser er påkrevd. 2. Tilførsel av 220V skal utføres av godkjent elektriker. 3. Systemet
BRUKER MANUAL SWING GATE OPENER Viktig med hensyn til sikkerhet: 1. Kjennskap til relevante elektro-tekniske bestemmelser er påkrevd. 2. Tilførsel av 220V skal utføres av godkjent elektriker. 3. Systemet
Kravspesifikasjon. Utvikling av moduler til CMS for bonefish.no. Gruppe 08-23
 Utvikling av moduler til CMS for bonefish.no Gruppe 08-23 Kravspesifikasjon for hovedprosjektet utvikling av moduler til CMS for bonefish.no ved Høgskolen i Oslo, avdeling for Ingeniørutdanning våren 2008.
Utvikling av moduler til CMS for bonefish.no Gruppe 08-23 Kravspesifikasjon for hovedprosjektet utvikling av moduler til CMS for bonefish.no ved Høgskolen i Oslo, avdeling for Ingeniørutdanning våren 2008.
Institutt for informasjonsteknologi, Høgskolen i Oslo og Akershus, våren Camilla Kaasi(s188070) Roza Moustafa(s188113)
 Roza Moustafa(s188113)") Forprosjektrapport Gruppe 14 Institutt for informasjonsteknologi, Høgskolen i Oslo og Akershus, våren 2015 Sted: Høgskolen i Oslo og Akershus Dato: 23.01.2015 Tittel: Gruppemedlemmer: Oppgave: Oppdragsgiver:
Forprosjektrapport Gruppe 14 Institutt for informasjonsteknologi, Høgskolen i Oslo og Akershus, våren 2015 Sted: Høgskolen i Oslo og Akershus Dato: 23.01.2015 Tittel: Gruppemedlemmer: Oppgave: Oppdragsgiver:
Gjennomføring av muntlig-praktisk eksamen i Teknologi og Forskningslære 1 Privatister
 Gjennomføring av muntlig-praktisk eksamen i Teknologi og Forskningslære 1 Privatister Utdanningsprogram: Studiespesialisering Realfag Fagkode og fagnavn: REA3018 Teknologi og forskningslære 1 Type fag
Gjennomføring av muntlig-praktisk eksamen i Teknologi og Forskningslære 1 Privatister Utdanningsprogram: Studiespesialisering Realfag Fagkode og fagnavn: REA3018 Teknologi og forskningslære 1 Type fag
MONTERINGSANVISNING FOR HANDI-LIFT ML7
 MONTERINGSANVISNING FOR HANDI-LIFT ML7 Innholdsfortegnelse 1 Introduksjon... 3 1.1 Sjekk delene og tegningen... 3 1.2 Elektrisk installasjon... 3 2 Kraftpåvirkning på bygningen... 4 3 Installasjon av tårnet...
MONTERINGSANVISNING FOR HANDI-LIFT ML7 Innholdsfortegnelse 1 Introduksjon... 3 1.1 Sjekk delene og tegningen... 3 1.2 Elektrisk installasjon... 3 2 Kraftpåvirkning på bygningen... 4 3 Installasjon av tårnet...
Testrapport. Aker Surveillance. Gruppe 26. Hovedprosjekt ved Høgskolen i Oslo og Akershus. Oslo, 24.5.2013. Public 2013 Aker Solutions Page 1 of 5
 Testrapport Aker Surveillance Gruppe 26 Hovedprosjekt ved Høgskolen i Oslo og Akershus Oslo, 24.5.2013 Public 2013 Aker Solutions Page 1 of 5 Innledning I denne rapporten vil vi skrive om testingen som
Testrapport Aker Surveillance Gruppe 26 Hovedprosjekt ved Høgskolen i Oslo og Akershus Oslo, 24.5.2013 Public 2013 Aker Solutions Page 1 of 5 Innledning I denne rapporten vil vi skrive om testingen som
Førebuing/ Forberedelse
 Førebuing/ Forberedelse 04.06.2018 AUT4003 Automatiseringsfaget Nynorsk/Bokmål Nynorsk Informasjon til førebuingsdelen Førebuingstid Hjelpemiddel Bruk av kjelder Vedlegg Andre opplysningar Informasjon
Førebuing/ Forberedelse 04.06.2018 AUT4003 Automatiseringsfaget Nynorsk/Bokmål Nynorsk Informasjon til førebuingsdelen Førebuingstid Hjelpemiddel Bruk av kjelder Vedlegg Andre opplysningar Informasjon
VH Service Software. Dette dokumentet forteller deg i korte trekk hvilke funksjoner denne programvaren har, basert på følgende menyvalg:
 VH Service Software Dette dokumentet forteller deg i korte trekk hvilke funksjoner denne programvaren har, basert på følgende menyvalg: File Settings Test Alarm Help Dette er startsiden i denne service
VH Service Software Dette dokumentet forteller deg i korte trekk hvilke funksjoner denne programvaren har, basert på følgende menyvalg: File Settings Test Alarm Help Dette er startsiden i denne service
Installasjon Siden modulen både har bustilkopling og IP-tilkopling er det viktig å tenke gjennom hvordan man bruker den.
 SMS-modul Dokument Konsept Kategori Modell Programmeringsmanual HDL-BUS Pro Grensesnitt SB-DLP-SMS/IP Innledning SMS-modulen finnes i to utgaver, en som kun sender og mottar SMS og en som i tillegg kan
SMS-modul Dokument Konsept Kategori Modell Programmeringsmanual HDL-BUS Pro Grensesnitt SB-DLP-SMS/IP Innledning SMS-modulen finnes i to utgaver, en som kun sender og mottar SMS og en som i tillegg kan
VURDERINGSKRITERIER KOMPETANSEMÅL FINMEKANIKERFAGET GRUNNLAG FOR GJENNOMFØRING OG VURDERING AV FAG- OG SVEINEPRØVE
 VURDERINGSKRITERIER KOMPETANSEMÅL FINMEKANIKERFAGET GRUNNLAG FOR GJENNOMFØRING OG VURDERING AV FAG- OG SVEINEPRØVE Hovedområder Tilrettelegging Finmekanikk Ordning Alle skal opp til fagprøven, som normalt
VURDERINGSKRITERIER KOMPETANSEMÅL FINMEKANIKERFAGET GRUNNLAG FOR GJENNOMFØRING OG VURDERING AV FAG- OG SVEINEPRØVE Hovedområder Tilrettelegging Finmekanikk Ordning Alle skal opp til fagprøven, som normalt
Trådløs kommunikasjonsenhet IRF-W
 Trådløs kommunikasjonsenhet Beskrivelse: kan programmeres som sender eller mottager. Det betyr at 2 stk kan overføre et signal fra en relèutgang til en inngang. Maks 100 meter. På Icas systemer bruker
Trådløs kommunikasjonsenhet Beskrivelse: kan programmeres som sender eller mottager. Det betyr at 2 stk kan overføre et signal fra en relèutgang til en inngang. Maks 100 meter. På Icas systemer bruker
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246
 ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett