Rozborová úloha (RÚ)
|
|
|
- Marte Mikalsen
- 5 år siden
- Visninger:
Transkript
1 ŽILINSKÁ UNIVERZITA V ŽILINE STAVEBNÁ FAKULTA Katedra cestného staviteľstva Rozborová úloha (RÚ) Metodika merania a vyhodnocovania stavu povrchu vozovky pomocou zariadenia LineScan - 1. etapa Hodnotenie stavu povrchu vozovky kamerovým systémom LineScan - 2. etapa Žilina, september 2010
2 Technické podmienky (TP) Metodika merania a vyhodnocovania stavu povrchu vozovky pomocou zariadenia LineScan - I. etapa Hodnotenie stavu povrchu vozovky kamerovým systémom Line Scan - 2. etapa Úloha RVT 2010/2011 Objednávateľ: Slovenská správa ciest, Miletičova 19, Bratislava Zhotoviteľ: ŽILINSKÁ UNIVERZITA V ŽILINE, Stavebná fakulta, Katedra cestného staviteľstva, Univerzitná 8215/1, Žilina Podzhotoviteľ: CAMEA, spol. s r.o., Kořenského 26, Brno Zodpovedný pracovník: prof. Ing. Ján Čelko, CSc. Odborní riešitelia: doc. Ing. Daniela Ďurčanská, CSc. Ing. Eva Remišová, PhD. Ing. Milan Tabak Ing. Michal Kutlík Jaroslav Piala 2
3 Obsah 1 ÚVOD ZÁKLADNÉ TERMÍNY A DEFINÍCIE ÚČEL MERANIA A HODNOTENIA STAVU POVRCHU VOZOVIEK POPIS ZARIADENIA VŠEOBECNÝ POPIS SÚČASTI ZARIADENIA Kamera Osvetľovací systém GPS systém Hardvér a softvér zariadenia VÝBER POKUSNÝCH ÚSEKOV PRE OVERENIE ZARIADENIA DEFINOVANIE SPOĽAHLIVOSTI A OPAKOVATEĽNOSTI MERANIA POROVNANIE VÝSLEDKOV LINESCANU S PODROBNÝMI VIZUÁLNYMI PREHLIADKAMI A VIDEO ZÁZNAMOM VIZUÁLNE PREHLIADKY Videozáznam Vyhodnotenie video záznamov Vyhodnotenie vizuálnych prehliadok VYHODNOTENIE SYSTÉMOM LINESCAN Spracovanie údajov programom RoadView Parametre výpočtu Priebeh výpočtu Výstupy programu POROVNANIE VÝSLEDKOV POUŽITÝCH METÓD Grafické porovnanie zachytenia porúch medzi videozáznamom a Linescanom POROVNANIE HODNOTENIA VÝSLEDKOV POUŽITÝCH METÓD NÁVRH SLEDOVANÝCH PORÚCH ZHODNOTENIE METODIKA MERANIA ZARIADENÍM LINESCAN PRÍPRAVA ZARIADENIA ROZSAH MERANIA RÝCHLOSŤ MERANIA PODMIENKY MERANIA POČET MERANÍ
4 6.6 SKÚŠOBNÝ PROTOKOL HODNOTENIE STAVU POVRCHU PROGRAMOM ROADVIEW Hodnotenie stavu cestnej siete Hodnotenie projektu údržby a opráv ZÁVERY A ODPORÚČANIA ZHODNOTENIE SÚČASNÝCH MOŽNOSTÍ ZARIADENIA POŽIADAVKY NA ĎALŠÍ POSTUP RIEŠENIA PRÍLOHA 1 SPRÁVA O OPAKOVATEĽNOSTI MERANIA A VYHODNOTENIA DÁT ZARIADENÍM LINESCAN POŽIADAVKY ZARIADENIE LINESCAN Stávajúci systém snímanie obrazu Osvetlenie vozovky Meranie vzdialenosti, poloha zariadenia, spracovanie informácií SOFTVÉR NA OBRAZOVÚ ANALÝZU Analýza obrazu a následná detekcia porúch vozovky ZÁVER Analýza pri stávajúcej konfigurácii LineScan Úpravy LineScan a následná detekcia PRÍLOHA 2 NÁVRHY NA ÚPRAVU ZARIADENIA LINESCAN STÁVAJÚCA KONFIGURÁCIA LINE SCAN PONÚKANÉ ÚPRAVY ZARIADENIA LINESCAN Objektív Výmena kamerového systému Osvetlenie Formát výstupných dát, záloha PRÍLOHA 3 VYHODNOTENIE MERANÍ ZARIADENÍM VIDEOCAR PRÍLOHA 4 GRAFICKÉ ZÁZNAMY Z VIZUÁLNYCH PREHLIADOK PRÍLOHA 5 ZÁZNAM HODNOTENIA UCI POUŽITÁ LITERATÚRA SÚVISIACE A CITOVANÉ PRÁVNE PREDPISY SÚVISIACE A CITOVANÉ NORMY SÚVISIACE A CITOVANÉ TECHNICKÉ PREDPISY OSTATNÁ POUŽITÁ LITERATÚRA
5 14 ZOZNAM OBRÁZKOV ZOZNAM TABULIEK
6 1 ÚVOD Úloha bola spracovaná na základe objednávky Slovenskej správy ciest ako úloha RVT. Jej cieľom je spracovanie technického predpisu na hodnotenie stavu povrchu vozoviek pomocou automatizovaného zariadenia LineScan na snímanie povrchu a vyhodnotenia videodát. Riešenie úlohy je rozdelené na dve etapy, cieľom prvej bolo spracovanie metodiky merania zariadením LineScan, cieľom druhej spracovanie technického predpisu. Konkrétna náplň riešenia jednotlivých etáp je nasledovná: 1. etapa: 2. etapa: výber pokusných úsekov pre overenie a kalibráciu zariadenia LineScan, definovanie spoľahlivosti a opakovateľnosti merania zariadením LineScan, porovnávacie merania zariadením LineScan, overované podrobnými vizuálnymi prehliadkami a klasickým videozáznamom, spracovanie metodiky merania zariadením LineScan, výber typu porúch pre ďalšie spracovanie na základe moţností zariadenia a potrieb SHV, spracovanie metodiky vyhodnocovania videosnímkov zariadenia LineScan, systém hodnotenia stavu povrchu vozoviek pre potreby SHV na základe údajov zariadenia LineScan, spracovanie technického predpisu. Na riešení spolupracovali odborníci z firmy CAMEA, spol. s r.o., ktorá sa zaoberá analýzou a hodnotením videozáznamov povrchov rôznych štruktúr. Ich štúdia hodnotenia zariadenia LineScan venovaná opakovateľnosti merania a kvality záznamu povrchu vozovky je prílohou správy. 1.1 Základné termíny a definície Termíny pouţité v týchto technických podmienkach sú uvedené v STN ako aj ďalších súvisiacich STN a TP. Na účely týchto podmienok sa dopĺňa nasledovná definícia: LineScan je zariadenie firmy Greenwood Engineering, určené pre sledovanie povrchu vozovky snímacím zariadením, zaloţeným na video zázname pri umelom osvetlení povrchu. 1.2 Účel merania a hodnotenia stavu povrchu vozoviek Pre potreby projektov opravy a údrţby cestnej siete a tieţ pre hodnotenie stavu vozoviek na cestnej sieti SR je potrebná analýza stavu povrchu vozoviek. Táto analýza sa v súčasnosti spracováva na základe podrobných vizuálnych prehliadok, resp. na základe analýzy merania zariadením VideoCar. Podrobné vizuálne prehliadky poskytujú najlepší obraz o stave povrchu vozovky, sú však 6
7 vysoko náročné na manuálny zber dát a zaťaţené subjektívnym pohľadom hodnotiteľa. Meranie pomocou VideoCaru rovnako vyţaduje manuálny záznam zberaných dát. Zariadenie LineScan odstraňuje uvedené nedostatky doteraz pouţívaných metodík, umoţňuje rýchly kontinuálny zber dát. Záznam povrchu vozovky je automatizovaný a nie je ovplyvnený subjektívnym faktorom. Hodnotenie stavu povrchu vozovky je jedným zo vstupov do Systému hospodárenia s vozovkami (SHV), pomocou ktorého sa definuje spôsob údrţby a opráv. Stav povrchu je hodnotený faktorom IPSV (Index porušenia stavu vozovky). 7
8 2 POPIS ZARIADENIA 2.1 Všeobecný popis Zariadenie LineScan firmy Greenwood Engineering z Dánska je navrhnuté na kontinuálne zaznamenávanie digitálneho obrazu povrchu vozovky pri premennej rýchlosti pohybu vozidla. Pre zabezpečenie nezávislosti na osvetlení okolia je zariadenie vybavené vysokovýkonným LED osvetľovacím systémom, ktorého výkon je niekoľkonásobne vyšší ako slnečné svetlo. Zariadenie vyuţíva tzv. riadkovú kameru, ktorá na rozdiel od klasických kamier nesníma plochu, ale lineárny obraz časti povrchu vozovky. Vysokorýchlostný záznam umoţňuje veľmi detailné zobrazenie povrchu vozovky vo vysokom rozlíšení, avšak za cenu veľkého mnoţstva spracovávaných dát (hodina záznamu cca 500 MB dát). 2.2 Súčasti zariadenia Zariadenie pre snímanie 3,5 m širokého záznamu obsahuje nasledovné súčasti: uzatvorený príves s dvoma nápravami hmotnosti kg, samostatný benzínový generátor pre napájanie zariadenia, umiestnený na prívese, zdroj systému (230 V, 12 V), LineScan kamera, osvetľovací systém (červené LED lampy), odometer pre meranie vzdialenosti, systém pre zber dát s integrovaným GPS, počítač a softvér pre záznam a hodnotenie dát, výkonný notebook pre spracovanie dát. V kabíne vodiča je umiestnená konzola počítača pre monitorovanie systému a riadenie zberu dát. Konzola je obsluhovaná vodičom, príp. spolujazdcom Kamera Kamera Spyder3 SG-10-02k40-00-L (Obrázok 1) je umiestnená na ráme prívesu, je vybavená optikou 28 mm alebo 24 mm. 8

9 Obrázok 1 Konfigurácia kamery pre 3,5 m šírku obrazu Osvetľovací systém Systém sa skladá z 32 lámp, každá lampa obsahuje 12 LED diód, objektív a elektroniku (Obrázok 2 a 9


10 Obrázok 3). Lampy sú chladené vzduchom. Svetlo sa spúšťa impulzom riadeným z rotačného enkodéra s 20,000 pulzami pri otočení kolesa. Snímač je pripojený na jednom zo zadných nábojov kolies. Šošovky so svetlom treba nastaviť a zamerať na povrch vozovky. Trvanie svetelného impulzu je o niekoľko mikrosekúnd dlhšie, ako expozičný čas kamery. Obrázok 2 Osvetľovací LED systém Obrázok 3 Lampa s LED diódami (vypnutý a zapnutý stav) 10
11 2.2.3 GPS systém Zariadenie je opatrené integrovaným modulom GPS pre detailnú lokalizáciu merania v rámci zemepisných súradníc Hardvér a softvér zariadenia Počítačová zostava zariadenia DELL N09X7301je zaloţená na Intel Gigabitovom Ethernete s nasledovnou konfiguráciou: Pamäť 2x500GB in Raid 0. Procesor CPU Core2Duo. RAM 2x1GB. Klávesnica. Monitor s rozlíšením 1600x1200 bodov. Windows XP English. Softvér RoadView pre záznam a hodnotenie s moţnosťou operátorských poznámok a zaznamenávania udalostí pomocou lokalizácie GPS. Softvér je k dispozícii v dvoch verziách verzia a verzia Popis programového vybavenia je v Prílohe 1. Na základe popisu bola pre vyuţitie v rámci úlohy vybratá verzia
12 3 VÝBER POKUSNÝCH ÚSEKOV PRE OVERENIE ZARIADENIA Pre účely overenia zariadenia LineScan, jeho spoľahlivosti a porovnania s ďalšími pouţívanými metódami hodnotenia stavu povrchu vozoviek boli vybraté tri úseky na cestách I. a II. triedy v okolí Ţiliny. Vybraté boli úseky, na ktorých sa realizovali merania zariadením LineScan a tieţ podrobné vizuálne prehliadky. V tabuľke 1 je uvedený popis sledovaných úsekov, na obr. 4 ich lokalizácia. Tabuľka 1 Sledované úseky Úsek Dĺžka Začiatok úseku Popis Smer merania I/11 CA/KNM 700 m od dopravnej značky hranice okresu CA/ZA úsek s opravami a zmenou povrchu v jednom smere (smer Žilina) I/11 Brodno 1000 m od začiatku štvorpruhu - smer Žilina dlhodobo sledovaný úsek bez výrazných porúch v jednom smere (smer Žilina) len ľavý pruh II/ m Križovatka III/ obec Divinka intravilán, miestami znečistený povrch pri chodníku v jednom smere (smer Bytča) II/ m Žilina - Pov. Chlmec, budova IBG Holding intravilán, miestami znečistený povrch pri chodníku v jednom smere (smer Žilina) 12

13 Obrázok 4 Lokalizácia úsekov 4 DEFINOVANIE SPOĽAHLIVOSTI A OPAKOVATEĽNOSTI MERANIA Pre určenie opakovateľnosti bolo realizovaných 10 meraní na rovnakom úseku cesty II/507 v obci Povaţský Chlmec. Meraný úsek bol dlhý 200 m, od staničenie 800 po koniec meraného úseku. Merania boli realizované za rovnakých podmienok, pričom rýchlosť merania bola nasledovná: - prvé a jedenáste meranie pri konštantnej rýchlosti 40 km/h, - druhé aţ desiate meranie pri premenlivej rýchlosti km/h, - desiate meranie bolo ovplyvnené narušením jazdy iným vozidlom, rýchlosť merania bola nerovnomerná. V priebehu jednotlivých pojazdov vozidla nebolo vzhľadom na manuálny spôsob spustenia merania moţné exaktne určiť začiatok merania. Z toho dôvodu bolo v druhom kroku analýzy zvolené za počiatočný bod merania staničenie 811 m, v ktorom bolo zariadenie aktívne pri všetkých meraniach. Pre analýzu opakovateľnosti bol zvolený výpočtový parameter UCI - Unified Cracs Index, ktorý zariadenie počíta na základe zaznamenávaných trhlín na vozovke. Bliţší popis UCI je v prílohe správy. Porovnania získaných hodnôt UCI sú na nasledujúcich obrázkoch pre rôzne intervaly hodnotenia. Obrázky sú spracované uţ pre zjednotený začiatok merania. 13
14 Obrázok 5 Merania opakovateľnosti celý úsek Obrázok 6 Merania opakovateľnosti úsek 0-50 m Obrázok 7 Merania opakovateľnosti úsek m 14
15 Obrázok 8 Merania opakovateľnosti počiatočný 10 m úsek merania Obrázok 9 Merania opakovateľnosti úsek zmeny rýchlosti merania č.10 Z obrázkov je zrejmé, ţe definovanie opakovateľnosti merania je veľmi zloţitý proces. Vozidlo len s problémami zachováva jednotnú stopu jazdy. Pre beţné merania je posun v jazdnej stope otázkou chyby v úplnosti záznamu. Závaţnejším problémom je spoľahlivosť vyhodnocovania, ktorá je nedostatočná. Vyplýva to z rozdielnych hodnôt parametra UCI pre rovnakú sledovanú plochu vozovky. Podrobnejšie je tento problém rozoberaný v samostatnej správe fy CAMEA, uvedenej v Prílohe 1. 15

16 5 POROVNANIE VÝSLEDKOV LINESCANU S PODROBNÝMI VIZUÁLNYMI PREHLIADKAMI A VIDEO ZÁZNAMOM 5.1 Vizuálne prehliadky Zber dát sa realizoval podľa TP 13/2006 pracovnou skupinou, ktorá počas pochôdzky po vozovke zaznamenala údaje o viditeľných poruchách do predpísaných formulárov. Sledovali sa len poruchy povrchu vozovky, priečne nerovnosti neboli zaznamenávané. Zber údajov sa vykonal dňa , počasie bolo oblačné, ale povrch vozovky bol suchý a neznečistený. Analyzované boli úseky podľa tab. 1. Meračská skupina bola vybavená digitálnym diaľkomerom, meracím kolieskom, kriedou na zapisovanie staničenia na povrch vozovky, videokamerou na zdokumentovanie video záznamu, písacími potrebami a záznamom porúch z podrobnej vizuálnej prehliadky (formulár). Zber sa vykonával pochôdzkou v jednom smere. Meraním sa zisťovala a zaznamenávala šírka jazdného pruhu digitálnym diaľkomerom pre kaţdý úsek zvlášť, na viacerých vopred stanovených bodoch. Zistené poruchy vizuálnou prehliadkou sa zaznamenávali do vopred pripraveného formulára záznamu porúch z podrobnej vizuálnej prehliadky Videozáznam Videozáznam bol vyhotovený digitálnou videokamerou typu Sony LCD DCR - HC96 (Obrázok 10). Videozáznam je vyhotovený v digitálnom rozlíšení CCD kpixelov, v detailných záberoch je pouţitý zoom 10x a fotografie sú v kvalite 2,3 MPx. Obrázok 10 Videokamera Sony LCD DCR - HC96 Videozáznam bol vyhotovený pracovnou skupinou v priebehu vykonania podrobných vizuálnych prehliadok za účelom zdokumentovania a spresnenia obrazového záznamu podrobnej vizuálnej prehliadky. Videozáznam dokumentuje staničenie po päťdesiatich metroch z dôvodu spresnenia umiestnenia poruchy a zachytávania iných činiteľov napr. znečistenia. Tieto údaje boli potrebné pre správne porovnanie zistených porúch videozáznamom a vyhodnotením snímania LineScanom pomocou programu RoadView. 16
17 5.1.2 Vyhodnotenie video záznamov Vyhodnotenie video záznamov je pre rozsiahlosť uvedené v tabuľkách v prílohe Vyhodnotenie vizuálnych prehliadok Záznamy boli vyhodnotené v programovom prostredí PORUCHY7. Vzhľadom na veľkosť záznamov v tab. 2 je uvedené len celkové hodnotenie úsekov. Tabuľka 2 Vyhodnotenie vizuálnych prehliadok podľa TP 13/2006 IPSV podľa podrobných VP Koncový bod Pruh Počiatočné staničenie Dĺţka Klasifikácia IPSV I/11 KU Brodno P ,98 I/11 KU KnM P ,8 II/507 KU IBG Holding P ,81 II/507 KU IBG Holding P ,62 II/507 KU IBG Holding P ,8 II/507 KU IBG Holding P ,1 II/507 KU IBG Holding P ,66 II/507 KU IBG Holding P ,35 II/507 KU IBG Holding P ,96 II/507 KU IBG Holding P ,14 II/507 KU IBG Holding P ,82 II/507 KU IBG Holding P ,96 II/507 KU IBG Holding P ,91 II/507 KU IBG Holding P ,5 II/507 KU IBG Holding P ,82 II/507 KU IBG Holding P ,32 II/507 KU IBG Holding P ,01 II/507 KU IBG Holding P ,22 II/507 KU IBG Holding P ,01 II/507 KU IBG Holding P ,71 II/507 KU IBG Holding P ,31 II/507 KU IBG Holding P ,39 II/507 KU IBG Holding P ,67 II/507 KU IBG Holding P ,4 II/507 KU IBG Holding P ,47 II/507 KU IBG Holding P ,11 II/507 KU IBG Holding P ,92 II/507 KU IBG Holding P ,58 17
, na ktoré je celý snímaný obraz rozdelený.")
18 5.2 Vyhodnotenie systémom LineScan Záznamy zo zariadenia LineScan boli následne vyhodnotené programom RoadView. Program pracuje na princípe porovnávania 8 bitovej hodnoty jasovej zloţky pixlu (časti obrazu), na ktoré je celý snímaný obraz rozdelený. Pre hodnoty farebnej škály je pouţitá beţná tabuľka prostredia Windows. V prípade lokalizácie tmavších častí voči okoliu sú tieto vyhodnotené ako porucha povrchu. Hodnotenie povrchu je spracované pomocou indexu trhlín (UCI Unified Crack Index), na základe čoho je zrejmé, ţe zariadenie spracováva prioritne trhliny na povrchu (obr.11). Pri výpočte boli pouţité výrobcom nastavené parametre programu RoadView. Obrázok 11 Princíp výpočtu UCI [zdroj: software RoadView] Spracovanie údajov programom RoadView Práca s programom je intuitívna na základe jednoduchého menu. Z toho dôvodu uvedieme len základný postup výpočtu. Pred začatím výpočtu je potrebné definovať parametre (pozri nasledujúca kapitola). Následne z ponuky základného menu (obr. 12) je potrebné vybrať súbor na analýzu (obr. 13). Po výbere sa spustí výpočet UCI. 18

19 Obrázok 12 Základné okno programu RoadView Obrázok 13 Výber súboru pre analýzu 19
20 5.2.2 Parametre výpočtu Pri výpočte je moţné nastaviť parametre, ktoré definujú okrajové podmienky hodnotenia snímaného obrazu. V programe je moţné nastaviť nasledovné parametre: HighThresholdOffset (HTO) Hodnota orezania pouţitá v obrazci. Ak je hodnota pixlu vyššia ako medián obrazu, je nahradený hodnotou susedného pixlu. Ak existuje biely pixel vedľa tmavšieho pixlu, môţe vzniknúť neţiaduce vytvorenie porušeného miesta. AveragingBlockSize (ABS) Hodnota veľkosti analyzovanej okolitej oblasti pixelu. Ak je pixel tmavší ako susedné oblasti (s ohľadom na pouţitý prah), je označený ako moţná chyba. AdaptiveThreshold (AT) Hodnota adaptívneho prahu, ktorá percentuálne porovná farebnú hodnotu pixlu so susednou oblasťou. Ak je hodnota niţšia ako stanovené percento okolitej oblasti, je označená ako potenciálne chybná. DynamicThreshold (DT) DT porovná absolútnu farebnú hodnotu pixelu s okolitou oblasťou. Ak je hodnota pixlu niţšia ako susedné oblasti, je označená ako chyba. DirectionCoreSize (DCS) Vzdialenosť kombinovanej plochy. Algoritmus sa snaţí kombinovať chyby, ktoré sú blízko seba vo vodorovnom alebo zvislom smere. Hodnota určuje poţadovanú vzdialenosť chybných pixlov, aby sa skombinovali do samostatnej poruchy. RegionSizeThreshold (RST) Definovanie minimálneho počtu pixlov pre interpretáciu poruchy. Parameter filtruje šumy pri definovaní poruchy. UCIBlockSize Veľkosť UCI bloku v pixloch (vertikálne i horizontálne). 20
 - pouţíva adaptívne prahové hodnoty. Metódy sa líšia len v pouţitom parametri treshold.")
21 UCIThreshold Definuje počet pixlov, ktoré označujú samostatnú poruchu. Metódy výpočtu: Program pracuje v dvoch reţimoch: ProcessImageAdaptive () pouţíva dynamické prahové hodnoty. ProcessImageDynamic () - pouţíva adaptívne prahové hodnoty. Metódy sa líšia len v pouţitom parametri treshold. Ak sa pouţije adaptívny, tak táto hodnota udáva percentuálny podiel z priemernej hodnoty farby pixelu danej oblasti. Čo znamená, ţe ak je priemerná hodnota farby pixelov v danej oblasti napr. 110 a AdaptiveThreshold je rovný 90(%), tak ak má práve analyzovaný pixel hodnotu väčšiu ako 99 (90% * 110), tak je označený ako vadný. Ak sa však pouţije dynamický treshold, tak sa analyzovaný pixel porovnáva priamo z absolútnou hodnotou AdaptiveThreshold a ak je jeho hodnota väčšia, je označený ako vadný. Pouţité hodnoty parametrov sú uvedené na obr. 14. Obrázok 14 Parametre výpočtu 21
22 5.2.3 Priebeh výpočtu Priebeh výpočtu je moţné sledovať na obrazovke programu, kde sa zobrazí aj ukončenie výpočtu (obr.15). Po ukončení výpočtu je moţné prezerať obraz povrchu vozovky (obr. 16). Následne je moţné na základe výberu analyzovať detekované porušenia povrchu (obr. 17) a zobraziť vypočítaný grafický priebeh hodnoty indexu UCI (obr. 18). Pre ilustráciu moţných nesprávne hodnotených zmien farby povrchu je na obr. 17 a obr. 18 vidieť neidentifikovateľný tieň, označený programom ako porušenie povrchu. Tieň na staničení 185 sa prejavil aj na hodnote parametra UCI (obr. 19). Obrázok 15 Základné okno programu RoadView 22


23 Obrázok 16 Priebeh výpočtu Obrázok 17 Zobrazenie povrchu vozovky 23
. Súbory obsahujú fotografie povrchu vo zvolenom dĺţkovom intervale, implicitne po 1 m (obr. 21).")
24 Obrázok 18 Mapa porušenia povrchu Obrázok 19 Index UCI Výstupy programu Výstupmi programu sú grafické súbory typu *.jpg alebo *.bmp podľa výberu uţívateľa (obr. 20). Súbory obsahujú fotografie povrchu vo zvolenom dĺţkovom intervale, implicitne po 1 m (obr. 21). 24


25 Obrázok 20 Okno exportu Obrázok 21 Export záznamu Textové výstupy programu sú rozsiahle a väčšinou slúţia len k prezeraniu výsledkov v programe. Ich identifikácia je podľa názvu, ktorý korešponduje s názvom primárneho 25
26 (spracovávaného) súboru. Názov obsahuje dátum a číslo merania. Pre uţívateľa sú zaujímavé výsledkové súbory: súbor *.hea, v ktorom je hlavička súboru s identifikačnými prvkami úseku (obr. 22), súbor *.uci, v ktorom sú uloţené vypočítané údaje indexu trhlín (obr. 23). Ostatné súbory obsahujú: súbor *.cra záznam o trhlinách, súbor *.dis indexovanie záznamu, súbor *.evt zaznamenané udalosti, súbor *.pg2 namerané údaje (základný spracovávaný súbor), súbory *.z2, *.z4 a *.z8 zoomy pre následné prezeranie úseku v programe. Lokalizácia úseku je moţné v hlavičkovom súbore v poloţkách "Start at" a "Stop at". Doteraz vykonávané merania tieto poloţky nezaznamenávali. Obrázok 22 Súbor *.hea 26

27 Obrázok 23 Časť súboru *.uci 5.3 Porovnanie výsledkov pouţitých metód V druhej etape riešenia úlohy bolo cieľom špecifikovať sledované poruchy povrchu vozovky za účelom hodnotenia stavu pomocou zariadenia LineScan, ktoré budú maximálne korešpondovať s výsledkami podrobných vizuálnych prehliadok. Za tým účelom boli porovnané výsledky meraní na pokusných úsekoch, realizované troma vyššie popísanými metódami podrobnou vizuálnou prehliadkou, videozáznamom a Linescanom. Porovnanie je uvedené v tab. 3 a tab. 4. V tabuľkách je zadaný názov úseku. Z podrobnej vizuálnej prehliadky je zadefinované staničenie a typ poruchy vozovky. Namerané poruchy sa porovnávajú s poruchami získanými videozáznamom a LineScanom. Zhodné zachytenie porúch s podrobnou vizuálnou prehliadkou je v tabuľke označené znakom,, + a nezhodné zachytenie je označené znakom,,. 27
28 Tabuľka 3 Porovnanie dát úsek II/507 II/507 Povaţský Chlmec smer Bytča Podrobná vizuálna prehliadka Zhodnosť porúch Staničenie (m) Typ poruchy Videozáznam Linescan 33,5 Tpo ,5 zmena povrchu Pis Ts Tov O Tov Ts,Tov ,5 Tpr ,5 Tpr Tpo Ts,Pr Tov Pr O Pr O Tov Pr Pr,Ts zmena povrchu Pr Tpo,Tov Tpr,Tov Tpr,Tov Tpr,Tov,V Tov Tpo Tpo Tpo Tpo Tov Tov Tpo x Tpo Ts Tpo Tpo
29 705 Ts Tpo,Ts Ts xTpo Tpo Tpo Ts Tov Tpo Ts Tpo Ts Tpr,Ts V O Kdv,O,Tpo Tpo Tpo Ts,O Pr Tpr,Ts Tpr,V Tpo Tpo Ts,Tpo Ts,Pr Ts,V Pr,O Ts,Tpr Ts,Tpo Tpo Pis,Tpo Tpo,Tpr xTpo Tpo,Tpr Tpr Tpo Tpr Pr O,Ts V,Tpr,Ts Ts,Tov Tpr
30 1194 Tpo Ts,Tpr,Tpo Tpo Tpo + + Tabuľka 4 Porovnanie dát úsek I/11 Brodno I/11 Brodno Podrobná vizuálna prehliadka Zhodnosť porúch Staničenie Typ poruchy Videozáznam Linescan 0 Tpo + chýba záznam 8,7 Tpr + chýba záznam 172 Tpr,Ts Tpr ,5 Tpo uzáver Tpr Tpr lokálne opravy ,5 zmena povrchu Grafické porovnanie zachytenia porúch medzi videozáznamom a Linescanom Predchádzajúca tabuľka bola ďalej analyzovaná z pohľadu vizuálnych rozdielov v zázname jednotlivých metodík. Grafické porovnanie je z úseku II/507 Povaţský Chlmec a pre kaţdý vyskytujúci sa typ poruchy zvlášť. Na ľavej strane sú obrazové záznamy zo zariadenia LineScan, na pravej strane fotografie z podrobnej vizuálnej prehliadky. Do porovnávania sme zaradili aj fotografie, ktoré neboli zaznamenané prostredníctvom vizuálnej prehliadky do formulára, ale boli zachytené videozáznamom. V niektorých prípadoch je do obrázkov zo zariadenia LineScan pridané pre zvýraznenie poruchy grafické značenie v tvare elipsy ţltej farby. Výtlk Podrobnou vizuálnou prehliadkou nebola porucha označená ako výtlk, nakoľko išlo o nesprávne vodorovné dopravné značenie. LineScan poruchu zachytil rovnako ako videozáznam. 30




31 Obrázok 24 Výtlk LineScan versus videozáznam Zmena povrchu vozovky Podrobnou vizuálnou prehliadkou bola porucha označená ako zmena povrchu vozovky. Nachádza sa v staničení 72,5 m a Linescan poruchu zachytil. Videozáznamom je porucha viditeľná. Obrázok 25 Zmena povrchu LineScan versus videozáznam Porucha na inžinierskych sieťach Podrobnou vizuálnou prehliadkou bola porucha označená ako porucha na inţinierskych sieťach. Nachádza sa v staničení 90 m a LineScan poruchu zachytil. Videozáznamom je porucha viditeľná. 31






32 Obrázok 26 Porucha na sieti LineScan versus videozáznam Oprava Podrobnou vizuálnou prehliadkou nebola porucha označená. Nachádza sa v staničení 92 m a LineScan poruchu zachytil. Videozáznamom je porucha viditeľná. Obrázok 27 Oprava LineScan versus videozáznam Sieťové trhliny Podrobnou vizuálnou prehliadkou bola porucha označená ako sieťové trhliny. Nachádza sa v staničení 98 m a LineScan poruchu správne nezachytil. Videozáznamom je porucha viditeľná. Obrázok 28 Sieťové trhliny LineScan versus videozáznam 32




33 Priečne trhliny Podrobnou vizuálnou prehliadkou bola porucha označená ako priečna trhlina. Nachádza sa v staničení 289,5 m a LineScan presný typ poruchy neoznačil. Videozáznamom je porucha viditeľná. Obrázok 29 Priečna trhlina LineScan versus videozáznam Olámané okraje Podrobnou vizuálnou prehliadkou bola porucha označená ako olámané okraje. Nachádza sa v staničení 302 m a LineScan poruchu označil. Videozáznamom je porucha viditeľná. Obrázok 30 Olámané okraje LineScan versus videozáznam Rozpad povrchu Podrobnou vizuálnou prehliadkou bola porucha označená ako rozpad povrchu. Nachádza sa v staničení 314 m a LineScan presný typ poruchy neoznačil. Videozáznamom je porucha viditeľná. 33


34 Obrázok 31 Rozpad povrchu LineScan versus videozáznam 5.4 Porovnanie hodnotenia výsledkov pouţitých metód Jednotlivé metodiky boli porovnané aj z pohľadu hodnotenia podľa TP 13/2006. Výsledky sú uvedené v tab. 5. Porovnávané boli hodnoty IPSV a UCI. Porovnanie je dôkazom faktu, ţe vypočítané hodnoty UCI zachytávajú len poruchy charakterizované ako trhliny. Rozdiel v hodnotách porovnávaných indexov je z dôvodu rozdielneho započítavania plochy trhlín. V IPSV je započítaná priečna a pozdĺţna trhlina so šírkou 1m, naproti tomu hodnota UCI šírku trhliny neberie do úvahy. Tabuľka 5 Porovnanie II/507 Považský Chlmec Staničenie (m) IPSV UCI Typy porúch ,81 2,06 Tpo, Pis, Ts, Tov, O ,62 2,38 Ts, Tov ,80 1,55 Tpr, Tpo, Ts, Pr, Tov ,10 3,35 Tov, Pr, Ts ,66 3,35 Tov ,35 1,52 Tpo, Pr, O ,96 1,52 Tvo, Pr, Ts ,14 2,71 Pr, Ts ,82 0,58 Tpo, Tpr, Pr, O, V ,96 0,69 Tpo, Tov ,91 4,23 Tov ,50 1,49 Tov ,82 1,08 Ts, Tpo ,32 2,28 Tpo, Ts ,01 1,75 Tpo ,22 3,12 Tpo, Ts 34
35 ,01 2,01 Tpo ,71 2,00 Tpo, Ts ,31 1,39 Tpo,Ts,Tpr,V,O,Pr,Kdv ,39 1,93 Tpo, Tpr, Pis ,67 1,20 Tpo, Ts, Tpr ,40 1,88 Tpr, Pr ,47 1,50 Ts, Pr, O, Tpr ,11 0,14 Ts, Tpr, V ,92 0,64 Ts ,58 0,95 Tpo 5.5 Návrh sledovaných porúch Na základe analýzy odporúčame sledovať zariadením LineScan poruchy podľa tab. 6. Tabuľka 6.Rozdelenie porúch pre vizuálne prehliadky návrh pre LineScan Miesto vzniku Povrch vozovky Kryt vozovky Konštrukčné vrstvy vozovky Označenie - druh poruchy V - výtlky T - trhliny Tov - olámané okraje Pis - poruchy pri inţinierskych sieťach Typy agregovaných porúch výtlky v obrusnej vrstve, výtlky v kryte, kaverny, pľuzgiere trhliny priečne, priečne rozvetvené, mrazové, trhliny pozdĺţne, reflexné, trhliny sieťové, mozaikové, blokové olámane okraje vozovky poruchy pri vpustoch, kanalizácií, porušené mostné dilatácie vo forme trhlín 5.6 Zhodnotenie Z analýzy je zrejmé, ţe LineScan odlišne zachytáva poruchy ako podrobná vizuálna prehliadka a videozáznam. LineScan nie je schopný zachytiť niektoré druhy porúch, predovšetkým trhliny veľmi malej šírky. Hraničná hodnota zachytenia trhliny je jej šírka 2 mm, čo môţeme povaţovať za nedostatočné. Z uvedeného dôvodu navrhujeme úpravu zariadenia, ktorá je špecifikovaná v prílohe 2. Problémom vyhodnotenia sú aj "zdanlivé" poruchy, ktorými sú len farebne odlišné plochy na vozovke - napr. nesprávne vodorovné značenie, odlišná farba krytu a pod. Z tohto dôvodu by bolo vhodné, aby kaţdý záznam po vyhodnotení bol vizuálne skontrolovaný. Rovnako odporúčame, aby 35
36 obsluha zariadenia zaznamenávala podobné anomálie povrchu uţ v zázname o meraní, čo môţe pomôcť pri jeho kontrole. Na základe uvedeného hodnotenia odporúčame dočasne pouţívať zariadenie LineScan v súčasnej konfigurácii. Spracované záznamy a poruchách je však potrebné dodatočne analyzovať a odfiltrovať nesprávne zaznamenané a vyhodnotené poruchy. Pre výpočet IPSV je nutné zistené poruchy manuálne preniesť do programu PORUCHY. Súčasne je potrebné z ďalších diagnostických zariadení preberať údaje, potrebné pre zhodnotenie stavu povrchu vozovky. Odporúčané sledované parametre sú uvedené v tab. 7. Tabuľka 7Údaje o poruchách preberané z iných zariadení Miesto vzniku Povrch vozovky Kryt vozovky, konštrukčné vrstvy vozovky Označenie - druh poruchy Po strata drsnosti Kpo - koľaj, priečna nerovnosť Kdv - deformácia Prebrať zo zariadenia Skiddometer (je samostatne uvaţovaná v SHV, nie je nutné započítavať do VP) Profilograph údaj preberať ako max. nerovnosť po úsekoch 20 m Profilograph prejaví sa v max. nerovnosti (porucha je uţ automaticky zaznamenaná) V ďalšej etape riešenia bude nevyhnutné na základe uvedenej analýzy doplniť merania zariadením LineScan v miestach výskytu porúch, ktorých zaznamenanie je pomocou zariadenia nereálne alebo problematické. Následne bude potrebné detailne špecifikovať, ktoré typy porúch budú pre výpočet klasifikácie vozovky vzaté do úvahy a na ich základe upraviť výpočet parametra IPSV s cieľom maximálneho priblíţenia sa k hodnotám, získaným podrobnými vizuálnymi prehliadkami. Rovnako bude nevyhnutné spracovať nový výpočtový program pre hodnotenie stavu vozovky parametrom IPSV pre zariadenie LineScan. Zo strany SSC by bolo potrebné vyvinúť snahu o získanie kvalitnejšie programového vybavenia pre prvotné hodnotenie dát zariadením LineScan, nakoľko existujúci program RoadView ani v jednej dostupnej verzii nezodpovedá poţiadavkám na súčasnú kvalitu vyhodnocovacích softvérov. 36
37 6 METODIKA MERANIA ZARIADENÍM LINESCAN V rámci prípravy technických podmienok bola na základe uvedenej analýzy spracovaná metodika merania pomocou zariadenia LineScan. Metodika je spracovaná pre súčasnú konfiguráciu zariadenia, bez ohľadu na odporúčania pre jej zmeny, ktoré budú uvedené v prílohách rozborovej úlohy. 6.1 Príprava zariadenia Údrţba a kalibrácia zariadenia sa vykonáva podľa pokynov výrobcu v stanovených časových intervaloch. Okrem pravidelnej údrţby je potrebné pred kaţdým meraním zariadenie skontrolovať a pripraviť na meranie. Príprava obsahuje nasledovné úkony: - kontrola funkčnosti meracieho systému kamera, generátor, zdroj, - kontrola lokalizačného systému odometer, GPS, - kontrola osvetľovacieho systému funkčnosť a čistota LED lámp, - kontrola funkčnosti záznamového systému počítač, softvér. Kontrolu vykonáva posádka zariadenia. Pre realizáciu merania musia byť všetky systémy plne funkčné. Osvetľovací systém (sústava LED lámp) je potrebné pred kaţdým meraním očistiť. Pre meranie je nevyhnutná dvojčlenná posádka, zloţená z vodiča a operátora, ktorý obsluhuje riadiaci počítač. 6.2 Rozsah merania Meranie sa realizuje jedným pojazdom vozidla so spustenými registračnými zariadeniami kamerou, svetelným rámom, lokalizačným zariadením a riadiacim počítačom. Spustenie zariadení zabezpečí operátor. Meracie zariadenia musia byť aktívne na začiatku meraného úseku. Začiatok meraného úseku nutné zaznamenať zemepisnými súradnicami pomocou zabudovaného systému GPS. Po ukončení prejazdu meraným úsekom operátor skontroluje záznam z merania. V prípade neúplnosti záznamu sa meranie opakuje. 6.3 Rýchlosť merania Rýchlosť merania sa pohybuje v rozsahu km/h, pre zachovanie presnosti záznamu je nutné počas merania zachovať konštantnú rýchlosť bez výraznejšej odchýlky od priemernej rýchlosti. Pri odchýlke rýchlosti nad 20% je meranie potrebné opakovať. 37
38 6.4 Podmienky merania Meranie nie je moţné realizovať za daţďa a sneţenia. Vozovka musí byť suchá a nesmie byť mechanicky znečistená. Teplota merania, svetelné podmienky a ostatné klimatické podmienky nemajú vplyv na meranie. Meranie sa realizuje v jazdnej stope, aby bol zabezpečený záznam celej šírky jazdného pruhu. V prípade vybočenia z jazdného pruhu je potrebné časť úseku s vybočením vylúčiť z vyhodnocovania, pri vybočení na úseku s vizuálne viditeľnými poruchami je meranie potrebné opakovať. Rovnako je potrebné meranie opakovať v prípade vybočenia na viac ako 20% meraného úseku. 6.5 Počet meraní Meranie zariadením LineScan sa predpokladá pre úroveň projektu opravy a údrţby a tieţ pre úroveň hodnotenia cestnej siete. Pre uvedené účely sa meranie realizuje 1 krát v kaţdom jazdnom pruhu. Pri špeciálnych účeloch merania, napr. pre porovnávacie a kalibračné merania je počet meraní stanovený osobitne. 6.6 Skúšobný protokol Skúšobný protokol z merania sa musí spracovať po kaţdom meraní, bez ohľadu na jeho účel. Musí obsahovať základné údaje o meraní, obsahujúce: - dátum merania, - lokalizáciu meraných úsekov, - meno vodiča a operátora zariadenia, - zvláštne okolnosti merania, potrebné na jeho vyhodnotenie. Podrobnejšie spracovanie nie je potrebné, nakoľko podrobné údaje sú súčasťou prvotného spracovania údajov pomocou implementovaného výpočtového systému a sú obsiahnuté v súbore *.hea. 6.7 Hodnotenie stavu povrchu programom RoadView Hodnotenie stavu povrchu je realizované pre dve úrovne: a) Úroveň cestnej siete. b) Úroveň projektu údrţby a opráv. 38
39 Program RoadView, ktorý je súčasťou zariadenia LineScan, nehodnotí stav povrchu vozovky na úrovni, poţadovanej SHV. Hodnotenie je postačujúce pre potreby úrovne cestnej siete a je realizované na základe hodnoty vypočítaného parametra UCI Hodnotenie stavu cestnej siete Pre definovanie kvality povrchu sledovanej cestnej siete sa vychádza z kritérií, stanovených na základe vypočítaného indexu trhlín UCI. Určuje sa maximálna hodnota na 20 m úseku z vyhodnotenie 1 m kroku. Hodnotenie je nasledovné: Úroveň 1 pri hodnote UCI < 5,0 Úroveň 2 pri hodnote UCI 5,0 9,0 Úroveň 3 pri hodnote UCI 9,1 13,0 Úroveň 4 pri hodnote UCI 13,1 18,0 Úroveň 5 pri hodnote UCI > 18,0. Bliţší popis programu a spôsobu vyhodnotenia je uvedený v prílohe Hodnotenie projektu údrţby a opráv Za súčasnej konfigurácii zariadenia LineScan nie je moţné získať poţadované kvalitatívne hodnotenie stavu povrchu. Poţiadavkám na potrebnú úpravu zariadenia je venovaná príloha 2 tejto správy. 39
40 7 ZÁVERY A ODPORÚČANIA 7.1 Zhodnotenie súčasných moţností zariadenia Pri súčasnej konfigurácii zariadenia a moţnostiach vyhodnocovacieho programu je LineScan moţné pouţiť v obmedzenom rozsahu na hodnotenie stavu povrchu vozovky na úrovni cestnej siete. Zariadenie zaznamenáva a vyhodnocuje len poruchy typu trhlín a plošných porúch malého rozsahu. Pri plošných poruchách navyše s rizikom nesprávneho definovania farebne odlišnej plochy povrchu. Klasifikácia stavu povrchu je určovaná na základe plochy porušenia v súlade s pravidlami, definovanými v SHV. Pre účely hodnotenia stavu povrchu na úrovni projektu údrţby a opráv zariadenie v súčasnej konfigurácii nie je vhodné. 7.2 Poţiadavky na ďalší postup riešenia Popísané problémy presnej lokalizácie úseku a vplyvu rýchlosti na vyhodnotenie stavu povrchu poţadujú nové porovnávacie merania. Tieto sú nevyhnutné aj pre analýzu povrchu v miestach výskytu porúch, ktorých zaznamenanie pomocou zariadenia sa ukázalo ako nereálne alebo problematické. Následne je nevyhnutné spresniť špecifikáciu porúch, ktoré budú pre výpočet klasifikácie vozovky vzaté do úvahy a na ich základe upraviť výpočet parametra IPSV s cieľom maximálneho priblíţenia sa k hodnotám, získaným podrobnými vizuálnymi prehliadkami. Uvedené aktivity nie je moţné v súčasnosti realizovať vzhľadom na poruchu zariadenia. Zo strany SSC by bolo potrebné vyvinúť snahu o získanie kvalitnejšie programového vybavenia pre prvotné hodnotenie dát zariadením LineScan, nakoľko existujúci program RoadView ani v jednej dostupnej verzii nezodpovedá poţiadavkám na súčasnú kvalitu vyhodnocovacích softvérov. Okrem nespoľahlivosti hodnotenia, prejavujúcej sa rôznymi výsledkami pri opakovanom meraní je tieţ nedostatočná funkcia aplikácie zadávaných okrajových podmienok hodnotenia. Taktieţ textové súbory, tvorené pri analýze merania sú nedostatočné, chýba textový výstup s hodnotením úseku a jeho parametrami. Rovnako však bude nevyhnutné spracovať nový výpočtový program pre hodnotenie stavu vozovky parametrom IPSV pre zariadenie LineScan. Výrobcom poskytnutý softvér ani po dopracovaní neposkytne moţnosti výstupov, poţadovaných SHV na Slovensku. Následne je nevyhnutné zapracovať výstupy zo zariadenia do programových prostriedkov SHV. Z pohľadu spresnenia analýzy povrchu vozoviek by bolo vhodné zváţiť úpravu zariadenia pre dosiahnutie detailnejšieho obrazu povrchu. Hlavným opatrením je výmena kamery s dosiahnutím 4k záznamu. Ďalším odporúčaným opatrením je zlepšenie systému osvetlenia povrchu. 40

41 podmienok. Uvedené problémy je potrebné vyriešiť pred spracovaním konečného znenia Technických 8 PRÍLOHA 1 SPRÁVA O OPAKOVATEĽNOSTI MERANIA A VYHODNOTENIA DÁT ZARIADENÍM LINESCAN 8.1 Poţiadavky Cieľom je analýza systému LineScan na automatizované snímanie a vyhodnocovanie povrchu vozovky. Kamerový systém (zariadenie LineScan) na vozidle, aj príslušný analytický softvér (RoadView) je od firmy Greenwood Engineering. Jeho parametre popisuje príslušná kapitola. Za účelom analýzy výsledkov systému bolo vykonaných 11 opakovaných meraní snímaní povrchu vozovky (LineScan data) na úseku cesty II/507 - Povaţský Chlmec. Tieto dáta boli spracované príslušným softvérom a výsledky konfrontované so záznamom z podrobnej vizuálnej prehliadky. Príslušné dáta a záznamy poskytol objednávateľ. 8.2 Zariadenie LineScan Stávajúci systém snímanie obrazu Ako zdroj na získanie obrazových dát slúţi zariadenie LineScan, ktoré zaznamenáva digitálny obraz povrchu vozovky. Pre úplnosť uvedieme základné vlastnosti systému. Zariadenie s výhodou vyuţíva prednosti riadkovej kamery oproti klasickej konvenčnej, ktorá sníma plochu. Dátový tok je 50 MB/s, kamera má záber 3,5 m na šírku pri rozlíšení 2048 px. Zariadenie je montované na príves s dvomi nápravami a je napájané z benzínového generátora. Typ kamery: DALSA - Spyder3 SG-10-02k40-00-L Tabuľka 8 Parametre kamery Spyder3 41


42 Pri zábere kamery 3,5m a rozlíšení kamery 2048 je veľkosť jedného pixlu 1,7 mm. Maximálna riadková frekvencia snímania je 18,5kHz, z čoho vyplýva teoretická maximálna rýchlosť vozidla, ktorá je 113 km/h. V popise zariadenia LineScan nie je uvedená maximálna rýchlosť snímania povrchu a ani postup snímania. Domnievame sa, ţe tento údaj neuviedli z dôvodu toho, ţe 42
43 maximálna povolená rýchlosť prívesu je 80 km/h a predpokladali, ţe rýchlejšie vozidlo nepôjde. Aj napriek tomuto dohadu by tento údaj mal byť jasne uvedený. Obrázok 32 Meranie pri konštantnej rýchlosti 43
 sa výsledok merania zaťaţuje chybou. Pokiaľ je to moţné, treba sa tomuto prípadu vyvarovať, prípadne ho predvídať a následne upraviť. 8.2.")
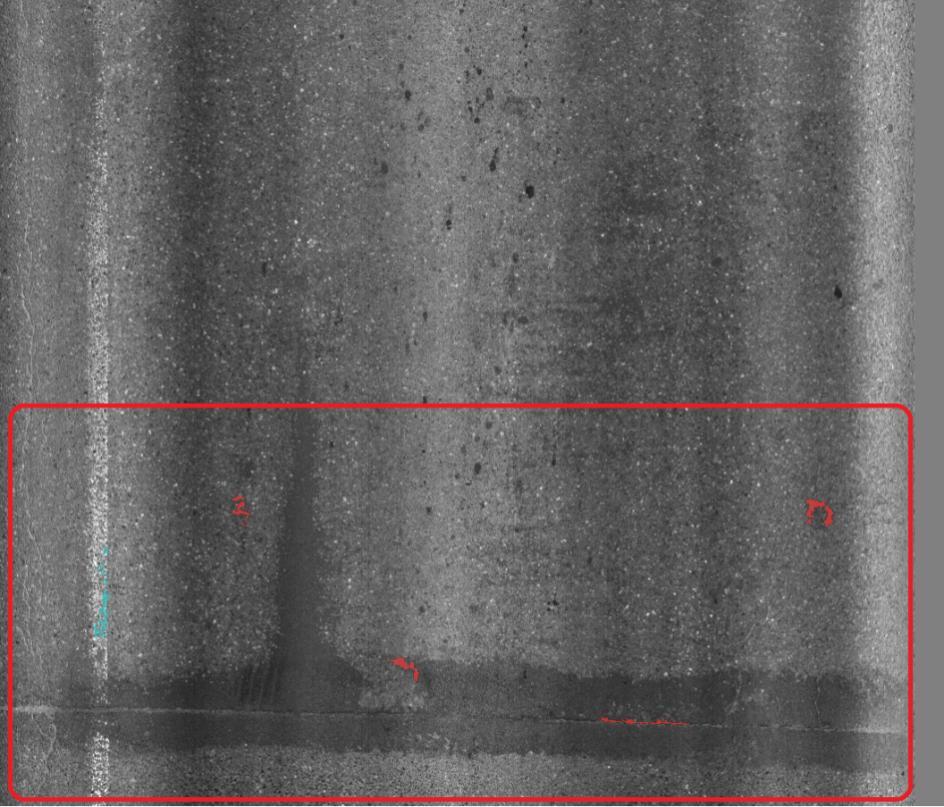
44 Obrázok 33 Meranie pri premenlivej rýchlosti - viditeľné artefakty Celkovo má však obraz prijateľnú kvalitu aj pri premenlivej rýchlosti (v rozumnej miere). Pri veľkej zmene rýchlosti (nečakaná prekáţka na trase) sa výsledok merania zaťaţuje chybou. Pokiaľ je to moţné, treba sa tomuto prípadu vyvarovať, prípadne ho predvídať a následne upraviť Osvetlenie vozovky Aby sa zabránilo vplyvu ambientného/denného svetla na výsledok, obsahuje systém LED osvetlenie, ktoré má v príslušnom spektre mnohonásobne vyššiu intenzitu ako slnečné svetlo. Vplyv denného svetla je zanedbateľný. Správne časovanie osvitu a synchronizáciu kamery zabezpečuje elektronika s príslušným rotačným enkodérom umiestneným na zadnej náprave. Porovnaním výsledkov z opakovaného merania rovnakého úseku sa zistila závažnejšia chyba v kvalite jednotlivých snímkov. Pri pohľade na jednotlivé snímky opakovateľnosti (obrázok 34) je vidieť aj napriek tomu, ţe kaţdý snímok zachytáva inú časť rovnakého úseku vozovky, 44
 aţ po nečistoty na objektíve kamery.")


45 vyskytujúce sa tmavé pruhy na identickom mieste. Vzdialenosť tmavého pruhu od okraja snímku je vždy rovnaká. Toto môţe mať niekoľko príčin od zlého osvetlenia povrchu (najviac pravdepodobné, pozri obrázok 35) aţ po nečistoty na objektíve kamery. Ak má chyba konštantný charakter, tak je moţné ju dodatočne korigovať v ponúkanej softvérovej analýze. Táto korekcia je moţná len do určitej hranice rozdielu intenzity jasu medzi dobre osvetleným povrchom a naopak zle osvetleným. Pri výpadku celého LED modulu nie je moţné v dostatočnej kvalite opraviť výsledok merania. Operátor vozidla pri meraní zistil výpadky LED modulov. Zariadenie LineScan nebolo schopné zistiť tento druh poruchy a neupozornilo operátora. Na pomerne malom monitore (prípadne v slnečný deň, kedy nie je dobre vidieť na monitor) operátor nie je schopný z nasnímaného obrazu poznať chybné osvetlenie, preto by bolo vhodné LineScan doplniť o systém na zistenie poruchy osvetlenia, či uţ charakteru výpadok LED modulu, prípadne špina na LED osvetlení, prípadne nečistoty na ochrannom skle kamery. Obrázok 34 Opakovateľnosť, tmavé pruhy 45
, systém pre zber dát (s integrovaným GPS), počítač s príslušným")
46 Obrázok 35 Výpadok osvetlenia Meranie vzdialenosti, poloha zariadenia, spracovanie informácií Systém obsahuje odometer (zariadenie na meranie vzdialenosti), systém pre zber dát (s integrovaným GPS), počítač s príslušným softvérom pre záznam a prevádzku a dva výkonné notebooky pre spracovanie dát. Pri porovnávaní výstupných dát z LineScan a záznamov z podrobnej vizuálnej prehliadky sa zistil rozdiel v meraní vzdialenosti. Príslušné staničenie a elektronický údaj o vzdialenosti z nameraných dát LineScan si navzájom neodpovedali a bola nutná korekcia, v našom prípade na strane spracovaných dát z LineScan. Chyba nemala konštantný charakter na celom úseku (od staničenia 800 do 825 chyba 2 m, následne 1 m). Čo sa týka opakovateľnosti merania, jednotlivé výsledky sa na rovnakom úseku kvalitatívne výrazne nelíšia. Porovnaním jednotlivých výsledkov opakovaných meraní sa zistili nedostatky merania snímania. Prvá pripomienka je k záberu snímkov vozovky jednotlivých opakovaných meraní. Ani v jednom prípade sa operátorovi šoférovi vozidla nepodarilo zosnímať identickú časť vozovky. Operátor pravdepodobne nie je schopný snímať oblasť povrchu deterministicky, ale len na základe svojho odhadu. Navyše záber kamery veľakrát nepokryje potrebnú oblasť vozovky a v niektorých prípadoch nezachytí napr. okraj vozovky, kde je nutné detekovať chyby typu olámané okraje. 46
47 Jedným z riešení by bolo snímať povrch vo viacerých priechodov podľa odhadu vodiča a výsledný obraz zostaviť dodatočne. Operátor nemá informáciu o presnej polohe záberu snímanej oblasti a nie je schopný pokračovať od okraju posledného záberu. Ďalej by bola moţná online detekcia okraju v spojení s lokalizačným systémom a následné vyhodnotenie presnej pozície vozidla na vozovke - záberu kamery. Tento údaj by sa napr. vodičovi vhodne vizuálne zobrazil ako jeho relatívna poloha/odchýlka od poţadovanej dráhy, prípadne by mu dával pokyny (doľava, OK, doprava). Ďalším riešením je zvýšiť záber kamery a zvýšiť pravdepodobnosť následnej detekcie porúch na okraji vozovky. Základným predpokladom na čo najúspešnejšiu detekciu porúch vozovky analytickým softvérom sú korektné vstupné dáta, t.j. zosnímaná celá plocha vozovky v čo najlepšej kvalite (tým je myslená nielen kvalita zosnímaného obrazu, ale aj čistota povrchu vozovky). 8.3 Softvér na obrazovú analýzu Kritickou oblasťou tejto štúdie je práve analýza a následná detekcia porúch vozovky. Firma Greenwood Engineering (ďalej len GE) poskytuje na analýzu nameraných dát softvér s názvom RoadView, ktorý je momentálne k dispozícii v dvoch verziách ver a ver Verzie sa líšia najmä uţívateľským rozhraním. Po analýze predpokladáme, ţe príslušný algoritmus na rozpoznávanie porúch z obrazu je v obidvoch verziách totoţný. Ďalej sa budeme venovať niektorým vlastnostiam programu RoadView a hlavne nedostatkom rozpoznávacieho algoritmu. Na úvod začneme hlavnými rozdielmi verzií programu RoadView. Aj keď číslo verzie naznačuje, ţe sa jedná o novšiu verziu, z pohľadu uţívateľa sa javí, ţe je tomu naopak. Zistené nedostatky ver : výsledný obraz je prevrátený, jednotlivé snímky z riadkovej kamery sú zobrazované v opačnom poradí (pozri Obrázok 36 staničenie); chýba moţnosť ZOOM; aj po analýze obrazu a vypočítaní UCI indexu (Unified Crack Index pozri manuál k RoadView) zobrazuje program výsledný obraz aj na relatívne výkonnom počítači veľmi spomalene a preto sa výsledok analyzuje veľmi obtiaţne; vypočítaná analýza obrazu (UCI index) nie je kompatibilná s ver


48 Obrázok 36 Prevrátený obraz (vľavo), správne staničenie z ver (vpravo) Kompaktnejšie sa javí verzia , ktorá odstraňuje niektoré chyby verzie Avšak jej veľkým nedostatkom je, ţe zmeny parametrov analýze sa nijako neprejavia vo výsledku. Tzn. ľubovoľná zmena parametrov nevyvolá opätovnú analýzu obrazu, teda zmeny parametrov sú ignorované. Jediná moţnosť ako vyvolať analýzu obrazu s nami definovanými parametrami je: 1. vymazanie súborov analýzy, spustenie programu RoadView, 2. následná zmena parametrov, 3. otvorenie poţadovaného súboru, 4. analýza sa spustí automaticky, keď program zistí chýbajúce súbory výsledku rozpoznávania Analýza obrazu a následná detekcia porúch vozovky Algoritmus je zaloţený na princípe vyhľadávania oblastí, ktoré majú tmavšiu farbu ako okolie sledovanej oblasti v obrázku. Ak narazí na potenciálne tmavšiu oblasť, analyzuje ju a prípadne ju označí ako chybu podľa nastavených parametrov. Parametre (Obrázok 36) HighThresholdOffset AveragingBlockSize AdaptiveThreshold DynamicThreshold DirectionCoreSize RegionSizeThreshold DoClassification UCIBlockSize UCIThreshold od firmy GE. Bliţšie vysvetlenie jednotlivých parametrov nájdeme v dokumentácii programu RoadView 48
49 Metódy spracovania obrazu Adaptívne spracovanie obrazu Dynamické spracovanie obrazu Tieto dve metódy sa líšia v tom, ktorý parameter treshold sa pouţije. Ak sa pouţije adaptívny, tak táto hodnota udáva percentuálny podiel z priemernej hodnoty farby pixelu danej oblasti. Čo znamená, ţe ak je priemerná hodnota farby pixelov v danej oblasti napr. 110 a AdaptiveThreshold je rovný 90 %, tak ak má práve analyzovaný pixel hodnotu väčšiu ako 99 (90 % * 110), tak je označený ako chybný. Ak sa pouţije dynamický treshold, tak sa analyzovaný pixel porovnáva priamo z absolútnou hodnotou AdaptiveThreshold a ak je jeho hodnota väčšia, je označený ako chybný. Na analýzu funkčnosti algoritmu sme pouţili obidve verzie programu RoadView a vzájomne sme konfrontovali ich výsledky. Nakoľko však generovali rovnaký výstup, z dôvodov vyššie uvedených sme sa pri hlbšej analýze zamerali na verziu K dispozícii boli výsledky 11 meraní a záznam z podrobnej vizuálnej prehliadky. S prednastavenými parametrami programu (obrázok 36) sme spustili prvú analýzu. Výstupom algoritmu je obraz povrchu vozovky s farebným označením oblastí (farba záleţí od intenzity poruchy, čiţe od diferencie farby potencionálne vadných pixelov od ich okolia), najčastejšou farbou je červená. Tento výstup algoritmu sme exportovali do súboru obrázkov [ RoadViewExport01 - options default ], kde nás zaujímali najmä oblasti, ktoré zaznamenala podrobná vizuálna prehliadka. Tieto oblasti sme porovnávali s papierovým záznamom podrobnej prehliadky. 49
![Obrázok 37 Východiskové parametre Názvy súborov obrázkov majú nasledujúci tvar: s838_ts_0,5x2,5_[36-39].](/docs-images/91/107409391/images/50-0.jpg "bmp Prvá poloţka udáva pozíciu v metroch odpovedajúcu záznamu vizuálnej prehliadky a teda aj staničeniu na vozovke. Druhá poloţka je typ poruchy a následne jej parametre.")
50 Obrázok 37 Východiskové parametre Názvy súborov obrázkov majú nasledujúci tvar: s838_ts_0,5x2,5_[36-39].bmp Prvá poloţka udáva pozíciu v metroch odpovedajúcu záznamu vizuálnej prehliadky a teda aj staničeniu na vozovke. Druhá poloţka je typ poruchy a následne jej parametre. V hranatých zátvorkách je uvedený štart a koniec sekcie v metroch, odpovedajúci parametrom snímku vozovky z LineScan zobrazených programom RoadView ver Na príslušnom obrázku je vţdy vyznačená porucha zaznamenaná vizuálnou prehliadkou respektíve (ne-)detekovaná programom RoadView. Pre ilustráciu je uvedený kaţdý druh poruchy a jeho výsledok. 50

51 Obrázok 38 s800_tpr_[3-6].bmp Obrázok 39 s869_tpo_[62-65].bmp 51
![Obrázok 40 s882_v_0,1_[78-81].](/docs-images/91/107409391/images/52-0.jpg "bmp Obrázok 41 s885_o_0.")
52 Obrázok 40 s882_v_0,1_[78-81].bmp Obrázok 41 s885_o_0.3x0,3_[81-84].bmp 52
![Obrázok 42 s893_kdv_0,5_o_1_tpr_1_[83-86].](/docs-images/91/107409391/images/53-0.jpg "bmp Obrázok 43 s986_tpo_0,5_[173-176].")
53 Obrázok 42 s893_kdv_0,5_o_1_tpr_1_[83-86].bmp Obrázok 43 s986_tpo_0,5_[ ].bmp 53
![Obrázok 44 s970_tpo_v_0,01_[158-161].bmp vozovky. Tabuľka a graf znázorňujú percentuálne správny resp.](/docs-images/91/107409391/images/54-0.jpg "chybný odhad porúch povrchu Tabuľka 9 Percentuálny odhad porúch povrchu vozovky UCI Options HTO = 40, AVB = 59, AT = 80, RST = 777, DCS = 5, UCI T = 33, UCI BS = 59 pochôdzkár [m] Druh poruchy [-]")
54 Obrázok 44 s970_tpo_v_0,01_[ ].bmp vozovky. Tabuľka a graf znázorňujú percentuálne správny resp. chybný odhad porúch povrchu Tabuľka 9 Percentuálny odhad porúch povrchu vozovky UCI Options HTO = 40, AVB = 59, AT = 80, RST = 777, DCS = 5, UCI T = 33, UCI BS = 59 pochôdzkár [m] Druh poruchy [-] auto [m] auto po korekcii [m] ODHAD správne označené [%] ODHAD chybne označené [%] Korekcia 800 Tpr , Tpr ,1 0 0 Ts 838 0,5x2, , Tpr 39 37, Ts 0,5x , Tpo 69 65, Ts 69 65, Ts x , V 0, , O 885 0,3x0, , O 88 84,
55 0,3x0,3 888 V 0, , Kdv 0, , O 1m , Tpr , Tpr , Tpr , Ts x0, , O 2x , Pr , Tpo , Tpo , V 0, , Tpr , Tpo 0, , Ts , Pr , Hodnoty v tabuľke sú subjektívnym odhadom, t.j. hodnota správne označenej poruchy značí koľko % porúch vozovky sa podarilo rozpoznať a označiť daným algoritmom. Druhý stĺpec vyjadruje chybu algoritmu, t.j. koľko percent z označenej oblasti je označené chybne, teda nie je to porucha vozovky - typicky kontrastné objekty. Hodnota korekcie v tabuľke udáva rozdiel merania automobilu oproti meraniu pochôdzkára, resp. staničeniu. 55
56 Obrázok 45 Percentuálny odhad porúch povrchu vozovky Z grafu je vidieť, ţe úspešnosť detekovania a označenia poruchy vozovky algoritmom programu Road View je veľmi nízka a v reálnom pouţití nedostatočná. Algoritmus je schopný zachytiť, len veľmi rozsiahle a kontrastné poruchy, čo je pochopiteľné z jeho princípu (tmavšie pixle ako okolitá oblasť sú potenciálne chybné). Najväčšiu úspešnosť zaznamenal pri priečnych poruchách a rozsiahlom rozpade vozovky, naopak jemné, ale rozsiahle trhliny povrchu nezaznamenal skoro vôbec. Po vykonaní prvej analýzy s predefinovanými nastaveniami sme sa pokúsili upraviť niektoré parametre. Najlepšie výsledky sme dosiahli úpravou a pouţitím adaptívneho tresholdu v rozumej miere (obrázok 43). Tým sa zvýšil percentuálny odhad správne označenej poruchy, ale od určitej hodnoty tresholdu rapídne narastal aj percentuálny podiel chybne označenej oblasti. Zmenou ostatných parametrov sme dosiahli len lokálne zlepšenie na niektoré typy porúch vozovky (obrázok 44). Je však nutné podotknúť, ţe nám nie je známy algoritmus výpočtu a teda nevieme presne odôvodniť, ako sa prejaví príslušná zmena jedného z parametrov na detekčnom algoritme. Jedinou moţnosťou bolo skúšať markantné zmeny jednotlivých parametrov podľa istých dohadov a zhodnotiť výsledok. Tento postup je niečo ako metóda pokus / omyl a nie je moţné v reálnom čase prehľadať celý priestor riešení daného algoritmu. Preto sme sa prevaţne drţali doporučených nastavení. 56
![Obrázok 46 s869_tpo_[62-65].bmp - AT = 87 Obrázok 47 s869_tpo_[62-65].bmp - DT = 11 8.](/docs-images/91/107409391/images/57-0.jpg "4 Záver Kamerový systém LineScan na snímanie povrchu od firmy GE spĺňa špecifiká, ktoré má uvedené v technickom popise.")
57 Obrázok 46 s869_tpo_[62-65].bmp - AT = 87 Obrázok 47 s869_tpo_[62-65].bmp - DT = Záver Kamerový systém LineScan na snímanie povrchu od firmy GE spĺňa špecifiká, ktoré má uvedené v technickom popise. Osvetlenie je nezávislé na dennom (ambientnom) svetle, takţe je 57
58 moţné merať za rôznych svetelných podmienok (slnko, šero,...). Za chybu sa dá povaţovať kvalita obrazu jednotlivých snímok s tmavými a svetlými pruhmi, ktoré spôsobuje snímací systém LineScan (osvetlenie). S najväčšou pravdepodobnosťou je problémom vypadávanie modulov osvetlenia, ktoré následne vytvára tmavé pruhy na výslednom obraze a tým zniţuje kvalitu snímku. Systém túto chybu nie je schopný poznať. Tento druh chyby je moţné v určitej tolerancii dodatočne opraviť ponúkaným SW. Drobné nepresnosti spôsobujú prudké zmeny rýchlosti, kedy sa na výslednom obraze vyskytujú vyššie uvedené artefakty. Ďalej je nutné skorigovať meranie vzdialenosti. V rámci opakovateľnosti sa chyba merania vzdialenosti nemení a je stála, nepoznáme absolútnu presnosť. Na zváţení je aj technika snímania povrchu (navigácia vozidla) a šírka záberu kamery. Za váţnejší nedostatok povaţujeme algoritmus na analýzu nameraných dát (Road View). Tento funguje na pomerne jednoduchej metóde vyhľadávania pixelov s tmavšou farbou ako je farba okolia. Tým pádom zachytáva len výrazné poruchy. V niektorých prípadoch nie je schopný zachytiť ani rozsiahlu poruchu (sieťová trhlina), pretoţe nie je v obraze reprezentovaná vhodnou farbou pixelov nie je výrazne tmavšia a metóda je nefunkčná. Výsledný graf UCI (Unified Crack Index) indexu preto neodpovedá záznamom z podrobnej vizuálnej prehliadky a bez dodatočnej analýzy nie je prakticky použiteľný. Firma na svojich stránkach propaguje LineScan ako doplnkové meranie k Profilografu, ktoré je moţné prevádzkovať aj samostatne a následne synchronizovať s iným zariadením (typicky Profilografom). Z tohto dôvodu usudzujeme, ţe LineScan nie je primárne určený pre počítačovú detekciu porúch vozovky, ale skôr ako obrazová dokumentácia k inému zariadeniu. Za nedostatok sa dá povaţovať aj formát a veľkosť výstupných dát. Pre neskoršie spracovanie je to ale jediná moţnosť. Preto ponúkame rapídne zníţenie veľkosti spracovaných dát určených na archiváciu pomocou kompresie a exportu len záujmovej oblasti (tej, v ktorej sa nachádza príslušná chyba a jej adekvátne okolie na dodatočnú analýzu) plus export do *.txt, *.csv. Táto metóda tým pádom umoţňuje ukladanie a archivovanie uţitočných dát a ich opätovné načítanie a analyzovanie v prípade potreby, bez nutnosti príliš veľkých zálohovacích zariadení. Nemalou výhodou je aj rýchlosť spracovania oproti pôvodnému SW, ako popisovala predchádzajúca kapitola Analýza pri stávajúcej konfigurácii LineScan Úspešná analýza je spojená s kvalitným nasnímaním a obrazovým výstupom v dostatočnom rozlíšení. So stávajúcou konfiguráciou LineScan je moţné vytvoriť softvér, ktorý bude schopný detekovať poruchy s minimálnym rozmerom 4 mm a viac. Je to priamo spojené s parametrami pouţitej kamery v LineScan. Správna klasifikácia detekovanej poruchy tým pádom nebude veľmi úspešná. Testovaním je moţné zistiť, ktoré druhy chýb a z akým percentom úspešnosti bude moţné odhaliť. Navyše problémom naďalej ostávajú nedostatky, ktoré boli spomenuté. 58
59 Príklad Systém LineScan obsahuje riadkovú kameru, ktorá má rozlíšenie 2048 p.x. a záber 3,5 m. Z toho vyplýva, ţe veľkosť jedného pixelu je cca 2 mm. Trhlina cca 4 mm je v obraze reprezentovaná 2, resp. 1 pixelom (obrázok 48). Pre úspešnú detekciu je to nedostačujúce. Pri tejto konfigurácii je veľmi náročné detekovať trhlinu zobrazenú na obrázku 48. Je moţné nasadiť napr. semienkový algoritmus, ale pri daných podmienkach by úspešnosť nebola aţ tak optimistická. Pri trhline pod 4 mm je to nereálne. Uţ poruchu na obrázku 1 (cca 4mm) je voľným okom veľmi ťaţké rozpoznať. Obrázok 48 Rozlíšenie LineScan 59

60 Obrázok 49 Problém detekcie Obrázok 49 ilustruje daný problém detekcie. Jedná sa o netriviálnu úlohu. To je dôvod, prečo konvenčný algoritmus od firmy GE zaloţený len na prahovaní nedosahoval uspokojivé výsledky. Obrázok bol získaný pouţitím vhodného filtra reprezentovaného konvolučnou maticou. Táto matica je vhodná len pre poruchy typu Tpr. Toto relatívne dobré riešenie funguje len pre jeden druh chýb a problém sa tým pádom rozpadá na niekoľko podproblémov. Z toho vyplýva, ţe detekcia musí byť rozhodne viacpriechodová. Otázkou je, čo zo sieťovými trhlinami. Samozrejme toto je jedno z moţných riešení Úpravy LineScan a následná detekcia Pre kvalitnejšiu automatizovanú analýzu s vyššou úspešnosťou detekcie resp. klasifikácie poruchy je nutná úprava zariadenia LineScan. Úprava sa týka samotnej kamery, osvetlenia a riadiaceho softvéru. Výsledky závisia od testovania a merania a dopredu nie je moţné 60

61 jednoznačne určiť percento zlepšenia detekcie porúch. Principiálne sa však môže dosiahnuť zlepšenie 2x a viac. Výmena kamerového systému Výmenou kamery za UNICAM D2, ktorá má rozlíšenie 5135 px a záber 4 m, sme schopní dosiahnuť veľkosť pixelu cca 1mm, čo je 4-násobné plošné zlepšenie, resp. 2-násobné zlepšenie v rámci riadku. Zvýšením počtu kamier je moţné dosiahnuť cca 0,5mm... Samozrejme všetko je podriadené rýchlosti snímania - rýchlosťou vozidla. Tieto parametre platia pre rýchlosť do cca 10 m/s, čo je 36 km/h. Kamery je moţné kombinovať a rôznymi zostavami kamier je moţné dosiahnuť poţadované parametre (napr. rýchlosť 80 km/h). Obrázok 50 UNICAM D2 Osvetlenie Pri výmene kamery je nutná aj úprava osvetlenia. Zvaţujeme laborovanie s nastavením uhlu osvetlenia, pripadne zmena napr. na infra-spektrum. Po skúsenostiach z projektov vieme, ţe správnym osvetlením je moţné dosiahnuť výrazné zlepšenie "kvality" obrazu pre následnú analýzu. Zlepši sa kontrast jemných trhlín, objavia sa tiene, trhliny vystúpia do popredia a zvýši sa ich detekcie-schopnosť. Zmena uhlu osvetlenia, zmena svetelného spektra (vlnovej dĺţky), pouţitie filtrov na kamere... Toto všetko môţe výrazne zvýšiť kontrast danej poruchy. 61
62 Plošné intenzívne nasvietenie, vytvára kvázi ambientné osvetlenie, takmer kolkmé k vozovke, nevznikajú tiene. Obrázok 51 Stávajúca konfigurácia difúzneho osvetlenia (red light) Nasvietenie pod ostrejším uhlom k vozovke výkonnými zdrojmi svetla. Tiene by mali vystúpiť. Obrázok 52 Úprava difúzneho osvetlenia 1 Obrázok 53 Úprava difúzneho osvetlenia 2 - IR spektrum Obrázok 53 ukazuje úpravu osvetlenia na IR spektrum. Toto riešenie môţeme byť veľmi perspektívne, nakoľko IR svetlo môţe zvýrazniť povrchové a priestorové závady. 62
. Pre úspešnú detekciu je to nedostačujúce.")
 je voľným okom veľmi ťaţké rozpoznať.")
63 9 PRÍLOHA 2 NÁVRHY NA ÚPRAVU ZARIADENIA LINESCAN 9.1 Stávajúca konfigurácia LINE SCAN Systém LineScan obsahuje riadkovú kameru, ktorá má rozlíšenie 2048 px a záber 3,5 m. Z toho vyplýva, ţe veľkosť jedného pixlu je cca 2 mm. Trhlina cca 4 mm je v obraze reprezentovaná 2, resp. 1 pixlom (obrázok 54). Pre úspešnú detekciu je to nedostačujúce. Obrázok 54 Rozlíšenie LineScan Pri tejto konfigurácii je veľmi náročné zistiť trhlinu zobrazenú na obrázku. Je moţné nasadiť napr. semienkový algoritmus, ale pri daných podmienkach by úspešnosť nebola aţ tak optimistická. Pri trhline pod 5mm je to nereálne. Uţ poruchu na obrázku (cca 5mm) je voľným okom veľmi ťaţké rozpoznať. Obrázok 55 ilustruje daný problém detekcie. Jedná sa o netriviálnu úlohu. To je dôvod, prečo konvenčný algoritmus od firmy GE zaloţený len na prahovaní nedosahoval uspokojivé výsledky. 63
. Je zrejmé, ţe táto matica je vhodná len pre poruchy typu Tpr.")

64 Obrázok 55 Problém detekcie Obrázok 55 bol získaný pouţitím vhodného filtra reprezentovaného konvolučnou maticou (pozri obrázok 56). Je zrejmé, ţe táto matica je vhodná len pre poruchy typu Tpr. Toto relatívne dobré riešenie funguje len pre jeden druh chýb a problém sa tým pádom rozpadá na niekoľko podproblémov. Z toho vyplýva, ţe detekcia musí byť rozhodne viacpriechodová. Otázkou je, čo zo sieťovými trhlinami. Samozrejme toto je jedno z moţných riešení. Obrázok 56 Konvolučná matica 64
65 Na zváţení je pouţitie ďalšieho zdroja informácií o povrchu vozovky ako doplnok 2D obrazu z LineScan. Navrhujeme pouţitie dát z profilografu. Niektoré druhy porúch nie je moţné detekovať bez dodatočnej informácie. V prvej fáze sme sa nebavili o klasifikácii porúch, len o percentuálnom vyjadrení poruchy v rámci definovaného úseku. Do budúcna je dobré uvaţovať aj o tejto alternatíve (spojení dát z LineScan a profilografu), pretoţe nám to umoţní presnejšiu klasifikáciu a správnu detekciu. Ide predovšetkým o plošné javy, pri ktorých môţu byť plochy farebne sa odlišujúce od povrchu vozovky (asfaltové škvrny, dopravné značenie a pod.) označené ako poruchy typu výtlkov a deformácií. Podobný význam môţe mať aj prepojenie s VIDEOCARom, v tomto prípade je však nutná dodatočná kontrola záznamov spracovateľom. Keď to zhrnieme, pri stávajúcej konfigurácii LineScan je moţné odhaliť trhliny, ktoré majú minimálne 4mm a viac. Pri krajnej hodnote je úspešnosť detekcie pomerne nízka aj keď sa pouţije sofistikovaný algoritmus. Zvýšenie robustnosti systému a rozšírenie klasifikácie na viacero druhov porúch vidíme v doplnení údajov z LineScanu o údaje z profilografu, prípadne VIDEOCARu. Problémom určite ostanú tenké trhliny (priečne, pozdĺţne, sieťové), ktoré nie sú dobre rozpoznateľné z obrazu LineScan ani voľným okom. 9.2 Ponúkané úpravy zariadenia LineScan Objektív Výmenou objektívu docielime zvýšenie záberu kamery na 4m. Pri stávajúcej kamere a jej rozlíšení zvýšime záber na úkor kvality, resp. veľkosti jedného pixlu. Táto úprava je bez výmeny kamery a svetelného systému bezpredmetná Výmena kamerového systému Výmenou kamery za UNICAM D2, ktorá má rozlíšenie 5135 px a záber 4 m, sme schopní dosiahnuť veľkosť pixelu cca 1mm, čo je 4-násobné plošné zlepšenie, resp. 2-násobné zlepšenie v rámci riadku. Zvýšením počtu kamier je moţné dosiahnuť cca 0,5mm. Samozrejme všetko je podriadené rýchlosti snímania - rýchlosťou vozidla. Tieto parametre platia pre rýchlosť do cca 10 m/s, čo je 36 km/h. Kamery je moţné kombinovať a rôznymi zostavami kamier je moţné dosiahnuť poţadované parametre. 65


 Vlastnosti kamerového krytu Materiál zliatina hliníku Farba šedá,")
66 Obrázok 57 UNICAM D2 Tabuľka 10 Parametre UNICAM D2 CCD snímač Rozlíšenie 5135 Citlivosť viditeľné a infračervené spektrum Optika Ohnisko voliteľné Snímanie Spracovanie signálu Riadkové hodiny 11 khz A/D prevodník 8 bit Ovládanie Trigger móde externí nebo interní (software) Riadenie zisku áno Riadenie offsetu áno Sériové rozhraní RS 232 Sieťové rozhraní Ethernet 1000 Mb/s Softwarový reset áno Riadenie clony áno Riadenie ostrenia áno Riadenie zoomu áno Elektrické vlastnosti Napájacie napätie 24 V Príkon 11 W (31 W s topením) Vlastnosti kamerového krytu Materiál zliatina hliníku Farba šedá, RAL
67 Rozmery Montáţ 4 M6 Krytí IP 65 Pracovní teplota - 20 C + 50 C Topení 20 W Dĺţka 590 mm Výška 165 mm Šírka 160 mm Hmotnosť 8 kg Osvetlenie Pri výmene kamery je nutná aj úprava osvetlenia. Zvaţujeme laborovanie s nastavením uhlu osvetlenia, pripadne zmena napr. na infra-spektrum. Po skúsenostiach z projektov vieme, ţe správnym osvetlením je moţné dosiahnuť výrazné zlepšenie "kvality" obrazu pre následnú analýzu. Zlepši sa kontrast jemných trhlín, objavia sa tiene, trhliny vystúpia do popredia a zvýši sa ich detekcie-schopnosť. Zmena uhlu osvetlenia, zmena svetelného spektra (vlnovej dĺţky), pouţitie filtrov na kamere... Toto všetko môţe výrazne zvýšiť kontrast danej poruchy. Plošné intenzívne nasvietenie, vytvára kvázi ambientné osvetlenie, takmer kolmé k vozovke, nevznikajú tiene. Obrázok 58 Stávajúca konfigurácia difúzneho osvetlenia (red light) 67
68 Nasvietenie pod ostrejším uhlom k vozovke výkonnými zdrojmi svetla. Tiene by mali vystúpiť. Obrázok 59 Úprava difúzneho osvetlenia 1 Obrázok 60 Úprava difúzneho osvetlenia 2 - IR spektrum Obrázok 7 ukazuje úpravu osvetlenia na IR spektrum. Toto riešenie môţeme byť veľmi perspektívne, nakoľko IR svetlo môţe zvýrazniť povrchové a priestorové chyby. 68


69 Obrázok 61 IR spektrum vidieť len povrchovú chybu Obrázok 62 Viditeľné spektrum - vidieť aj popis Formát výstupných dát, záloha Navrhujeme zaviesť dva reţimy. Pri počiatočnom testovaní a vývoji by softvér ukladal celú nasnímanú vozovku, aby bolo moţne dodatočne skúmať a testovať funkčnosť algoritmu. V prípade prijateľných výsledkov sa jednoducho prepne na ostrý reţim, kedy algoritmus vykonáva detekciu a klasifikáciu v reálnom čase a priamo pri snímaní ukladá len záujmové oblasti plus napr. 69

70 komprimovane okolie. Toto výrazne zníţi objem výstupných dát a výsledok bude reálne pouţiteľný a archivovateľný v databáze. Obrázok 63Príklad výstupného rozhrania 70


71 Obrázok 64 Sledovaný detail 71
26. Sterometria: Lineárne útvary v priestore metrické vzťahy
 26. Sterometria: Lineárne útvary v priestore metrické vzťahy Úlohy na výpočet vzdialeností a odchýliek, tzn. metrické úlohy, riešime v analytickej geometrii pomocou vektorov. V stereometrii sa snažíme
26. Sterometria: Lineárne útvary v priestore metrické vzťahy Úlohy na výpočet vzdialeností a odchýliek, tzn. metrické úlohy, riešime v analytickej geometrii pomocou vektorov. V stereometrii sa snažíme
Technický štandard: Suché transformátory 22/0,4 kv. Stredoslovenská energetika - Distribúcia, a.s. Pri Rajčianke 2927/8, Žilina,
 Stredoslovenská energetika - Distribúcia, a.s. Pri Rajčianke 2927/8, 010 47 Žilina, www.sse-d.sk Technický štandard: Suché transformátory 22/0,4 kv Vypracovali: Ing. Andrej Dadaj Ing. Peter Michalovič
Stredoslovenská energetika - Distribúcia, a.s. Pri Rajčianke 2927/8, 010 47 Žilina, www.sse-d.sk Technický štandard: Suché transformátory 22/0,4 kv Vypracovali: Ing. Andrej Dadaj Ing. Peter Michalovič
MKS 1KVA-5KVA MENIČ / NABÍJAČ
 Uţívateľský manuál Návod na obsluhu Axpert MKS 1KVA-5KVA MENIČ / NABÍJAČ Verzia: 1.5 Obsah O TOMTO NÁVODE... 1 Účel... 1 Rozsah... 1 BEZPEČNOSTNÉ POKYNY... 1 ÚVOD... 2 Funkcie... 2 Koncepcia systému...
Uţívateľský manuál Návod na obsluhu Axpert MKS 1KVA-5KVA MENIČ / NABÍJAČ Verzia: 1.5 Obsah O TOMTO NÁVODE... 1 Účel... 1 Rozsah... 1 BEZPEČNOSTNÉ POKYNY... 1 ÚVOD... 2 Funkcie... 2 Koncepcia systému...
SÚRADNICOVÝ SYSTÉM JEDNOTNEJ TRIGONOMETRICKEJ SIETE KATASTRÁLNEJ A JEHO VZŤAH K EURÓPSKEMU TERESTRICKÉMU REFERENČNÉMU SYSTÉMU 1989 (Verzia 2.
 Geodetický a kartografický ústav Bratislava Chlumeckého 4 87 45 Bratislava Technická správa SÚRADNICOVÝ SYSTÉM JEDNOTNEJ TRIGONOMETRICKEJ SIETE KATASTRÁLNEJ A JEHO VZŤAH K EURÓPSKEMU TERESTRICKÉMU REFERENČNÉMU
Geodetický a kartografický ústav Bratislava Chlumeckého 4 87 45 Bratislava Technická správa SÚRADNICOVÝ SYSTÉM JEDNOTNEJ TRIGONOMETRICKEJ SIETE KATASTRÁLNEJ A JEHO VZŤAH K EURÓPSKEMU TERESTRICKÉMU REFERENČNÉMU
SK skmo.sk. 68. ročník Matematickej olympiády 2018/2019 Riešenia úloh školského kola kategórie A
 SK MATMATIKÁOLYMPIÁA skmo.sk 68. ročník Matematickej olympiády 2018/2019 Riešenia úloh školského kola kategórie A 1. Nájdite všetky prvočísla p, q také, že rovnica x 2 + px + q = 0 má aspoň jeden celočíselný
SK MATMATIKÁOLYMPIÁA skmo.sk 68. ročník Matematickej olympiády 2018/2019 Riešenia úloh školského kola kategórie A 1. Nájdite všetky prvočísla p, q také, že rovnica x 2 + px + q = 0 má aspoň jeden celočíselný
Plán účasti a skúsenosti
 Plán účasti a skúsenosti Nástroj pre rozvoj a zabezpečenie kvality života pre dospelé osoby s kombinovaným alebo ťažkým zdravotným postihnutím. Erlend Ellefsen Knut Slåtta Prekladateľ, editor a autor vybraných
Plán účasti a skúsenosti Nástroj pre rozvoj a zabezpečenie kvality života pre dospelé osoby s kombinovaným alebo ťažkým zdravotným postihnutím. Erlend Ellefsen Knut Slåtta Prekladateľ, editor a autor vybraných
CHEM I CKÁ OLYM P I ÁDA
 CHEM I CKÁ OLYM P I ÁDA 47. ročník, školský rok 2010/2011 Kategória B Krajské kolo RI EŠENI E A HODNOTENI E ÚLOH 47. ročník Chemickej olympiády, riešenie a hodnotenie úloh krajského kola kategórie B Zodpovedný
CHEM I CKÁ OLYM P I ÁDA 47. ročník, školský rok 2010/2011 Kategória B Krajské kolo RI EŠENI E A HODNOTENI E ÚLOH 47. ročník Chemickej olympiády, riešenie a hodnotenie úloh krajského kola kategórie B Zodpovedný
HTS9520. CS Příručka pro uživatele. HU Felhasználói kézikönyv. PL Instrukcja obsługi. RO Manual de utilizare. SK Príručka užívateľa
 Register your product and get support at www.philips.com/welcome HTS9520 CS Příručka pro uživatele HU Felhasználói kézikönyv PL Instrukcja obsługi RO Manual de utilizare Príručka užívateľa Obsah 1 Dôležité
Register your product and get support at www.philips.com/welcome HTS9520 CS Příručka pro uživatele HU Felhasználói kézikönyv PL Instrukcja obsługi RO Manual de utilizare Príručka užívateľa Obsah 1 Dôležité
MATURITA 2011 MATEMATIKA
 KÓD TESTU 06 MATURITA 2011 EXTERNÁ ČASŤ MATEMATIKA NEOTVÁRAJTE POČKAJTE NA POKYN! PREČÍTAJTE SI NAJPRV POKYNY K TESTU. Test obsahuje 0 úloh. Na vypracovanie testu budete mať 120 minút. V teste sa stretnete
KÓD TESTU 06 MATURITA 2011 EXTERNÁ ČASŤ MATEMATIKA NEOTVÁRAJTE POČKAJTE NA POKYN! PREČÍTAJTE SI NAJPRV POKYNY K TESTU. Test obsahuje 0 úloh. Na vypracovanie testu budete mať 120 minút. V teste sa stretnete
u 120 Bratislava - 宵ilina - (Ko将゙ice) Y 50 Bratislava - C将ソfer km km Vlak 3351 c 120 u h IDS BK Bratislava - C将ソfer 401,% K W c c 3305 c
 Y 50 Bratislava - C将ソfer km km Vlak 3351 c 120 u h IDS BK Bratislava - C将ソfer 401,% K W c c 3305 c") u 120 Bratislava - 宵ilina - (Ko将゙ie) Y 50 Bratislava - C将ソfer km km Vlak 3351 3341 3305 RR 767,+ W v w _ x v 3305 3001 6 13353 10353 3307 2001 6 2003 6 K1 Zo stanie K将穰y K将穰y 0 Bratislava hl.st. 110,130,131
u 120 Bratislava - 宵ilina - (Ko将゙ie) Y 50 Bratislava - C将ソfer km km Vlak 3351 3341 3305 RR 767,+ W v w _ x v 3305 3001 6 13353 10353 3307 2001 6 2003 6 K1 Zo stanie K将穰y K将穰y 0 Bratislava hl.st. 110,130,131
VISCO KOMFORT-VISCO DUO-KOMFORT KOMFORT-HR DUO-HR40. RM-real, s.r.o. Cenník s DPH ROZMER O MOC AKCIA
 RM-real, s.r.o. Cenník 1.1.2014 s DPH ROZMER O MOC AKCIA 1+1ks 80x195/200x17cm 130 210 VISCO 85x195/200x17cm 134 Zloženie: JADRO-15/18cm- PUR pena T3042/V4012-pamäťová pena 90x195/200x17cm 138 profilované
RM-real, s.r.o. Cenník 1.1.2014 s DPH ROZMER O MOC AKCIA 1+1ks 80x195/200x17cm 130 210 VISCO 85x195/200x17cm 134 Zloženie: JADRO-15/18cm- PUR pena T3042/V4012-pamäťová pena 90x195/200x17cm 138 profilované
HTS7140. CS P íru ka pro uživatele. HU Felhasználói kézikönyv. PL Instrukcja obs ugi. RO Manual de utilizare. SK Príru ka užívate a
 Register your product and get support at www.philips.com/welcome HTS7140 CS P íru ka pro uživatele HU Felhasználói kézikönyv PL Instrukcja obs ugi RO Manual de utilizare Príru ka užívate a Obsah 1 Dôležité
Register your product and get support at www.philips.com/welcome HTS7140 CS P íru ka pro uživatele HU Felhasználói kézikönyv PL Instrukcja obs ugi RO Manual de utilizare Príru ka užívate a Obsah 1 Dôležité
Správa Hodnotenie verejných vysokých škôl a ich fakúlt (2005)
") Správa Hodnotenie verejných vysokých škôl a ich fakúlt (2005) (c) ARRA, Bratislava 2005 1 Správa zahŕňa výsledky projektu Hodnotenie kvality výskumu a vývoja na vysokých školách a ústavoch SAV v Bratislavskom
Správa Hodnotenie verejných vysokých škôl a ich fakúlt (2005) (c) ARRA, Bratislava 2005 1 Správa zahŕňa výsledky projektu Hodnotenie kvality výskumu a vývoja na vysokých školách a ústavoch SAV v Bratislavskom
BRODER ZÁRUKA 3 ROKY. DIZAJN: Nicolas Cortolezzis/Olle Lundberg
 DIZAJN: Nicolas Cortolezzis/Olle Lundberg BEZPEČNOSŤ Je veľmi dôležité, aby bola vaša úložná kombinácia zmontovaná správne, inak sa môže prevrhnúť alebo spadnúť a zraniť ľudí, či poškodiť veci. Tiež je
DIZAJN: Nicolas Cortolezzis/Olle Lundberg BEZPEČNOSŤ Je veľmi dôležité, aby bola vaša úložná kombinácia zmontovaná správne, inak sa môže prevrhnúť alebo spadnúť a zraniť ľudí, či poškodiť veci. Tiež je
Inovatívne riešenia na dosah ruky. Peletové kotly Ekogreń
 Inovatívne riešenia na dosah ruky Peletové kotly Ekogreń Peletové kotly Ekogreń Kotle na pelety Ekogreń sú moderné, ľahko použiteľné, ekologické a energeticky úsporné zariadenia. V ponuke sú tiež zariadenia
Inovatívne riešenia na dosah ruky Peletové kotly Ekogreń Peletové kotly Ekogreń Kotle na pelety Ekogreń sú moderné, ľahko použiteľné, ekologické a energeticky úsporné zariadenia. V ponuke sú tiež zariadenia
CENNÍK PARKIET A PODLÁH
 CENNÍK PARKIET A PODLÁH Platnosť: od 01.11.2013 Parkety CENNÍK PODLÁH A PARKIET MEISTER platný od 01.11.2013 Obsah Strana Prehľad parkiet MEISTER Parkety MEISTER - technické informácie 3 4 PD 550 / prírodný
CENNÍK PARKIET A PODLÁH Platnosť: od 01.11.2013 Parkety CENNÍK PODLÁH A PARKIET MEISTER platný od 01.11.2013 Obsah Strana Prehľad parkiet MEISTER Parkety MEISTER - technické informácie 3 4 PD 550 / prírodný
Funkcia. Funkcia. Monika Molnárová. Technická univerzita Košice. Funkcia. Monika Molnárová
 Technická univerzita Košice monika.molnarova@tuke.sk Obsah 1 Pojem funkcie Základné vlastnosti funkcií Zložená funkcia Inverzná funkcia Elementárne funkcie Základné funkcie ekonomickej analýzy Pojem funkcie
Technická univerzita Košice monika.molnarova@tuke.sk Obsah 1 Pojem funkcie Základné vlastnosti funkcií Zložená funkcia Inverzná funkcia Elementárne funkcie Základné funkcie ekonomickej analýzy Pojem funkcie
KARTA BEZPEČNOSTNÝCH ÚDAJOV
 Strana 1 z 8 ODDIEL 1: IDENTIFIKÁCIA LÁTKY/ZMESI A SPOLOČNOSTI /PODNIKU 1.1 Identifikátor produktu: Kód výrobku: 1.2 Relevantné identifikované použitia látky alebo zmesi a použitia, ktoré sa neodporúčajú:
Strana 1 z 8 ODDIEL 1: IDENTIFIKÁCIA LÁTKY/ZMESI A SPOLOČNOSTI /PODNIKU 1.1 Identifikátor produktu: Kód výrobku: 1.2 Relevantné identifikované použitia látky alebo zmesi a použitia, ktoré sa neodporúčajú:
POKYNY PRE NAVRHOVANIE vonkajších tepelnoizolačných kontaktných systémov stomixtherm alfa PUR
 Stránka 1 z 16 Tento dokument slúţi ako predpis k navrhovaniu vonkajšieho tepelnoizolačného kontaktného systému stomixtherm alfa PUR (ďalej len ETICS alebo systém) s tepelnou izolácie z penového polystyrénu
Stránka 1 z 16 Tento dokument slúţi ako predpis k navrhovaniu vonkajšieho tepelnoizolačného kontaktného systému stomixtherm alfa PUR (ďalej len ETICS alebo systém) s tepelnou izolácie z penového polystyrénu
Vera Kapeller Johannes Huemer (Ed.) Aktuálny a budúci vývoj bytovej výstavby v pohraničnej oblas Severného Burgenlandu a Bra slavy
 Aktuálny a budúci vývoj bytovej výstavby v pohraničnej oblas Severného Burgenlandu a Bra slavy") Vera Kapeller Johannes Huemer (Ed.) Aktuálny a budúci vývoj bytovej výstavby v pohraničnej oblas Severného Burgenlandu a Bra slavy 1 Táto publikácia prezentuje výsledky projektu RegioGoes Regionálny potenciál
Vera Kapeller Johannes Huemer (Ed.) Aktuálny a budúci vývoj bytovej výstavby v pohraničnej oblas Severného Burgenlandu a Bra slavy 1 Táto publikácia prezentuje výsledky projektu RegioGoes Regionálny potenciál
ŽILINSKÁ UNIVERZITA V ŽILINE
 ŽILINSKÁ NIVERZITA V ŽILINE Elektrotechnická fakulta Katedra výkonových elektrotechnických systémov BAKALÁRSKA PRÁCA 2009 Miroslav Minarčík 1. Súčasný stav problematiky veternej energetiky Pri dnešnej
ŽILINSKÁ NIVERZITA V ŽILINE Elektrotechnická fakulta Katedra výkonových elektrotechnických systémov BAKALÁRSKA PRÁCA 2009 Miroslav Minarčík 1. Súčasný stav problematiky veternej energetiky Pri dnešnej
POKYNY PRE NAVRHOVANIE
 Stránka 1 z 24 Tento dokument slúži ako predpis k navrhovaniu vonkajšieho tepelno-izolačného kompozitného systému (ďalej len ETICS alebo systémy) s tepelnou izoláciou z penového polystyrénu (EPS) a k navrhovaniu
Stránka 1 z 24 Tento dokument slúži ako predpis k navrhovaniu vonkajšieho tepelno-izolačného kompozitného systému (ďalej len ETICS alebo systémy) s tepelnou izoláciou z penového polystyrénu (EPS) a k navrhovaniu
Riadenie a manažment prechodu z inštitucionálnej na komunitnú starostlivosť
 Riadenie a manažment prechodu z inštitucionálnej na komunitnú starostlivosť PRIESTOR NA VAŠU PRÍLEŽITOSŤ Tento projekt sa realizuje vďaka podpore z Európskeho sociálneho fondu v rámci Operačného programu
Riadenie a manažment prechodu z inštitucionálnej na komunitnú starostlivosť PRIESTOR NA VAŠU PRÍLEŽITOSŤ Tento projekt sa realizuje vďaka podpore z Európskeho sociálneho fondu v rámci Operačného programu
pomenované nepomenované listen() server - klient Networking - 1 -
 server - klient Networking - 1 -") pomenované nepomenované listen() server - klient Networking - 1 - Téma: Networking Kľúčové slová Ciele Odhadovaný čas Scenár klient, server, socket, medziprocesová komunikácia základné princípy komunikácie
pomenované nepomenované listen() server - klient Networking - 1 - Téma: Networking Kľúčové slová Ciele Odhadovaný čas Scenár klient, server, socket, medziprocesová komunikácia základné princípy komunikácie
Zákon č. 578 / 2004 Z. z. Zákon o poskytovateľoch zdravotnej starostlivosti, zdravotníckych pracovníkoch, stavovských
 Zákon č. 578 / 2004 Z. z. Zákon o poskytovateľoch zdravotnej starostlivosti, zdravotníckych pracovníkoch, stavovských organizáciách v zdravotníctve a o zmene a doplnení niektorých zákonov (v znení č. 720/2004
Zákon č. 578 / 2004 Z. z. Zákon o poskytovateľoch zdravotnej starostlivosti, zdravotníckych pracovníkoch, stavovských organizáciách v zdravotníctve a o zmene a doplnení niektorých zákonov (v znení č. 720/2004
-,.%'/,012)301#0)43(/15641.,/1'3##)0/15/ !!!"#$%&%#'"()*+!,&()*, CD<E>;;CF GHI)4165
301#0)43(/15641.,/1'3##)0/15/ !!!#$%&%#'()*+!,&()*, CD<E>;;CF GHI)4165") -,.%'/,012)301#0)43(/15641.,/1'3##)0/15/!!!"#$%&%#'"()*+!,&()*, 7%6,*5189:;1?@1AB CD;;CF GHI)4165 !!!!!!!!!!!!!!!!!!!"#$%!&'('!)*!+!,-+./0+-1!'2!"#34%5!&&%6 7899!:!;'
-,.%'/,012)301#0)43(/15641.,/1'3##)0/15/!!!"#$%&%#'"()*+!,&()*, 7%6,*5189:;1?@1AB CD;;CF GHI)4165 !!!!!!!!!!!!!!!!!!!"#$%!&'('!)*!+!,-+./0+-1!'2!"#34%5!&&%6 7899!:!;'
JESEŇ. Ročník 5. Odborný časopis v oblasti plynárenstva, vykurovania, vodoinštalácií a klimatizačných zariadení
 Odborný časopis v oblasti plynárenstva, vykurovania, vodoinštalácií a klimatizačných zariadení JESEŇ 2 0 0 7 Ročník 5 ZOZNAM PREDAJCOV RADIÁTOROV SOLIDSTAV - Holubbyho 12, 040 01 Košice, Tel.: 055/7299661,
Odborný časopis v oblasti plynárenstva, vykurovania, vodoinštalácií a klimatizačných zariadení JESEŇ 2 0 0 7 Ročník 5 ZOZNAM PREDAJCOV RADIÁTOROV SOLIDSTAV - Holubbyho 12, 040 01 Košice, Tel.: 055/7299661,
SK4585. Návod na obsluhu notebooku
 SK4585 Návod na obsluhu notebooku Jún 2009 Obsah Bezpečnostné opatrenia... 3 Príprava notebooku... 5 Používanie dotykovej podložky... 7 Spoznanie súčastí... 8 Pravá strana... 8 Ľavá strana... 9 Zadná strana...10
SK4585 Návod na obsluhu notebooku Jún 2009 Obsah Bezpečnostné opatrenia... 3 Príprava notebooku... 5 Používanie dotykovej podložky... 7 Spoznanie súčastí... 8 Pravá strana... 8 Ľavá strana... 9 Zadná strana...10
4/5/6/ november 2016 EPALE. Bulletin pre vzdelávanie dospelých. Elektronická platforma vzdelávania dospelých v Európe
 4/5/6/ november 2016 Bulletin pre vzdelávanie dospelých EPALE EDITORIÁL Mágia navigácie PORAĎME SA NA PLATFORME EPALE O ĎALŠOM VZDELÁVANÍ ] Každá tvorivá práca inšpiruje k vytváraniu väzieb a stimulov.
4/5/6/ november 2016 Bulletin pre vzdelávanie dospelých EPALE EDITORIÁL Mágia navigácie PORAĎME SA NA PLATFORME EPALE O ĎALŠOM VZDELÁVANÍ ] Každá tvorivá práca inšpiruje k vytváraniu väzieb a stimulov.
Ú z e m n ý p l á n. C e n t r á l n e j m e s t s k e j z ó n y HLOHOVEC D O L O Ž K A C O O È I S T O P I S
 Ú z e m n ý p l á n C e n t r á l n e j m e s t s k e j z ó n y HLOHOVEC D O L O Ž K A C O O È I S T O P I S december 2010 ÚZEMNÝ PLÁN CENTRÁLNEJ MESTSKEJ ZÓNY HLOHOVEC DOLOŽKA CIVILNEJ OCHRANY december
Ú z e m n ý p l á n C e n t r á l n e j m e s t s k e j z ó n y HLOHOVEC D O L O Ž K A C O O È I S T O P I S december 2010 ÚZEMNÝ PLÁN CENTRÁLNEJ MESTSKEJ ZÓNY HLOHOVEC DOLOŽKA CIVILNEJ OCHRANY december
ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2017 MEDZINÁRODNÁ NORMA
 Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2017 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2017 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
Termické pohony. pre malé ventily, zónové a radiátorové ventily
 4 880 Termické pohony STS61.. pre malé ventily, zónové a radiátorové ventily Prevádzkové napätie, ovládací signál 0 10 V js Prestavná sila 105 N Priama montáž bez nástroja pomocou prevlečnej matice Štandardná
4 880 Termické pohony STS61.. pre malé ventily, zónové a radiátorové ventily Prevádzkové napätie, ovládací signál 0 10 V js Prestavná sila 105 N Priama montáž bez nástroja pomocou prevlečnej matice Štandardná
Štátne hmotné rezervy
 Štátne hmotné rezervy POHOTOVOSTNÉ ZÁSOBY Ing. Matúš LEŠKO hlavný radca Odbor MRaPZ Organizácia núdzového zásobovania a ubytovania evakuantov so zameraním sa na regionálne možnosti a zákonné možnosti použitia
Štátne hmotné rezervy POHOTOVOSTNÉ ZÁSOBY Ing. Matúš LEŠKO hlavný radca Odbor MRaPZ Organizácia núdzového zásobovania a ubytovania evakuantov so zameraním sa na regionálne možnosti a zákonné možnosti použitia
Návrh územného plánu obce (ÚPN-O) TULČÍK. Textová časť. Súhrnná správa
 TULČÍK. Textová časť. Súhrnná správa") Ing. arch. Ľubomír Polák, autorizovaný architekt Návrh územného plánu obce (ÚPN-O) TULČÍK Textová časť Súhrnná správa September 2003 OBSAH ELABORÁTU A. Textová časť Súhrnná správa Vyhodnotenie perspektívneho
Ing. arch. Ľubomír Polák, autorizovaný architekt Návrh územného plánu obce (ÚPN-O) TULČÍK Textová časť Súhrnná správa September 2003 OBSAH ELABORÁTU A. Textová časť Súhrnná správa Vyhodnotenie perspektívneho
ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2016 MEDZINÁRODNÁ NORMA
 Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2016 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2016 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
RAMIRENT KATALÓG 2017
 RAMIRENT KATALÓG 2017 Platnosť od 05/2017 POBOČKY RAMIRENT V SR Banská Bystrica Majerská cesta 65 974 01 Banská Bystrica 04 84 14 18 39 0903 223 064 bb@ramirent.sk ------------------------------- Bratislava
RAMIRENT KATALÓG 2017 Platnosť od 05/2017 POBOČKY RAMIRENT V SR Banská Bystrica Majerská cesta 65 974 01 Banská Bystrica 04 84 14 18 39 0903 223 064 bb@ramirent.sk ------------------------------- Bratislava
Hodnotenie verejných vysokých škôl a ich fakúlt (2007)
") Správa Hodnotenie verejných vysokých škôl a ich fakúlt () (c) ARRA, Bratislava 1 Prílohy 2 Zoznam príloh Príloha 1 Príloha 2 Frascati manuál, rozdelenie fakúlt Rozdelenie indikátorov do skupín a metodika
Správa Hodnotenie verejných vysokých škôl a ich fakúlt () (c) ARRA, Bratislava 1 Prílohy 2 Zoznam príloh Príloha 1 Príloha 2 Frascati manuál, rozdelenie fakúlt Rozdelenie indikátorov do skupín a metodika
Newsletter. Prečo je dôležité zapájať firmy do rozvojovej spolupráce? Zapájanie podnikateľov do rozvojovej spolupráce nie je ničím novým.
 Newsletter o rozvojovej spolupráci 201 TÉMA VYDANIA: Prečo je dôležité zapájať firmy do rozvojovej spolupráce? O tom, ako v Rakúsku funguje systém zapájania podnikateľov do rozvojovej spolupráce, diskutovali
Newsletter o rozvojovej spolupráci 201 TÉMA VYDANIA: Prečo je dôležité zapájať firmy do rozvojovej spolupráce? O tom, ako v Rakúsku funguje systém zapájania podnikateľov do rozvojovej spolupráce, diskutovali
KATALÓG VÝROBKOV Katalóg výrobkov SK
 KATALÓG VÝROBKOV Katalóg výrobkov SK72110921 Obsah ISO 9001 1. SCHÉMA KOMPLEXNÉHO NAPÁJACIEHO SYSTÉMU... 6 2. SYSTÉMY ZÁLOHOVANIA ELEKTRICKEJ SIETE... 7 2.1. Striedavé zálohové zdroje... 7 2.1.1. Popis
KATALÓG VÝROBKOV Katalóg výrobkov SK72110921 Obsah ISO 9001 1. SCHÉMA KOMPLEXNÉHO NAPÁJACIEHO SYSTÉMU... 6 2. SYSTÉMY ZÁLOHOVANIA ELEKTRICKEJ SIETE... 7 2.1. Striedavé zálohové zdroje... 7 2.1.1. Popis
Spravodaj obce Lozorno ročník XI : číslo 2 : marec/apríl 2013 zadarmo
 Spravodaj obce Lozorno ročník XI : číslo 2 : marec/apríl 2013 zadarmo Čím je človek starší, tým si úspechy viac váži Rozhovor s Filipom Lehmanom, Lozorňanom a profesionálnym hráčom basketbalu, ktorý už
Spravodaj obce Lozorno ročník XI : číslo 2 : marec/apríl 2013 zadarmo Čím je človek starší, tým si úspechy viac váži Rozhovor s Filipom Lehmanom, Lozorňanom a profesionálnym hráčom basketbalu, ktorý už
Partnerstvá - Grundtvig
 Partnerstvá - Grundtvig Väzenie a vzdelávanie v Ana Importný model - organizácia edukačných programov Ana väzenie 1. Apen avd. Rodgata (nízky stupeň stráženia) 2. Ana fengsel lukket (vysoký stupeň stráženia)
Partnerstvá - Grundtvig Väzenie a vzdelávanie v Ana Importný model - organizácia edukačných programov Ana väzenie 1. Apen avd. Rodgata (nízky stupeň stráženia) 2. Ana fengsel lukket (vysoký stupeň stráženia)
Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2015
 Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2015") Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2015 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2015 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
SILNÝ AKO SKALA! AUTOBATÉRIE PRE ÚŽITKOVÉ VOZIDLÁ ÚPLNÝ SORTIMENT BATÉRIÍ PRE NÁKLADNÉ A ÚŽITKOVÉ VOZIDLÁ: EXPERT HVR PROFESSIONAL POWER PROFESSIONAL
 AUTOBATÉRIE PRE ÚŽITKOVÉ VOZIDLÁ SILNÝ AKO SKALA! ÚPLNÝ SORTIMENT BATÉRIÍ PRE NÁKLADNÉ A ÚŽITKOVÉ VOZIDLÁ: EXPERT HVR POWER VYROBENÉ V EURÓPE SPOLOČNOSŤOU EXIDE TECHNOLOGIES DODÁVATEľOM ORIGINÁLNYCH AUTODIELOV
AUTOBATÉRIE PRE ÚŽITKOVÉ VOZIDLÁ SILNÝ AKO SKALA! ÚPLNÝ SORTIMENT BATÉRIÍ PRE NÁKLADNÉ A ÚŽITKOVÉ VOZIDLÁ: EXPERT HVR POWER VYROBENÉ V EURÓPE SPOLOČNOSŤOU EXIDE TECHNOLOGIES DODÁVATEľOM ORIGINÁLNYCH AUTODIELOV
Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2013
 Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2013") Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2013 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
Dohovor proti dopingu Rady Európy (T-DO) Svetová antidopingová agentúra (WADA) Svetový antidopingový kódex ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD 2013 MEDZINÁRODNÁ NORMA Oficiálny text Zoznamu zakázaných látok
OBRAZOVÁ PRÍLOHA A CENNÍK KONTAKT: ww.tramtariaslovakia.sk
 OBRAZOVÁ PRÍLOHA A CENNÍK KONTAKT: 0905068069 - tramtaria@tramtariaslovakia.sk - ww.tramtariaslovakia.sk VŠEOBECNÉ INFORMÁCIE PRE ZÁUJEMCOV O PRENÁJOM ATRAKCIÍ A ANIMÁCIE - našou devízou je že uvedené
OBRAZOVÁ PRÍLOHA A CENNÍK KONTAKT: 0905068069 - tramtaria@tramtariaslovakia.sk - ww.tramtariaslovakia.sk VŠEOBECNÉ INFORMÁCIE PRE ZÁUJEMCOV O PRENÁJOM ATRAKCIÍ A ANIMÁCIE - našou devízou je že uvedené
Žilinská univerzita v Žiline. Preladiteľný prenosový kanál
 Elektrotechnická fakulta Preladiteľný prenosový kanál Ján Sliacky 2006 Preladiteľný prenosový kanál DIPLOMOVÁ PRÁCA Ján Sliacky ŽILINSKÁ UNIVERZITA V ŽILINE Elektrotechnická fakulta Študijný odbor: TELEKOMUNIKÁCIE
Elektrotechnická fakulta Preladiteľný prenosový kanál Ján Sliacky 2006 Preladiteľný prenosový kanál DIPLOMOVÁ PRÁCA Ján Sliacky ŽILINSKÁ UNIVERZITA V ŽILINE Elektrotechnická fakulta Študijný odbor: TELEKOMUNIKÁCIE
calormatic 340f VRT 340f CZ; SK; RO
 calormatic 340f VRT 340f CZ; SK; RO Pro provozovatele a servisnнho technika Nбvod k obsluze a instalaci calormatic 340f Pokojovэ termostat VRT 340f CZ Obsah Obsah Informace k dokumentaci......... 4 Archivace
calormatic 340f VRT 340f CZ; SK; RO Pro provozovatele a servisnнho technika Nбvod k obsluze a instalaci calormatic 340f Pokojovэ termostat VRT 340f CZ Obsah Obsah Informace k dokumentaci......... 4 Archivace
SK Príru ka užívate a 173
 Register your product and get support at CS P íru ka pro uživatele 3 EL 27 FI Käyttöopas 52 HU Felhasználói kézikönyv 76 PL Instrukcja obs ugi 100 PT Manual do utilizador 124 RU 148 Príru ka užívate a
Register your product and get support at CS P íru ka pro uživatele 3 EL 27 FI Käyttöopas 52 HU Felhasználói kézikönyv 76 PL Instrukcja obs ugi 100 PT Manual do utilizador 124 RU 148 Príru ka užívate a
Komunikačné rozhranie pre laboratórne protokoly
 Komunikačné rozhranie pre laboratórne protokoly Prenos údajov z laboratórií je realizovaný prostredníctvom FTPS komunikácie v súboroch vo formáte XML. V prípade záujmu o automatický prenos údajov, treba
Komunikačné rozhranie pre laboratórne protokoly Prenos údajov z laboratórií je realizovaný prostredníctvom FTPS komunikácie v súboroch vo formáte XML. V prípade záujmu o automatický prenos údajov, treba
Slovakia: Opinion
 Jan 29 Feb 21 juli Feb 211 juli Feb 212 nov Jan 213 Feb 214 Febr 215 Febr 216 Febr 217 Slovakia: Opinion 29 217 5, 4, 3, 2, Smer-SD SDKÚ-DS MKP ĽS-HZDS Most Híd SaS OĽaNO SIEŤ Sme Rodina Kotleba L 1,,
Jan 29 Feb 21 juli Feb 211 juli Feb 212 nov Jan 213 Feb 214 Febr 215 Febr 216 Febr 217 Slovakia: Opinion 29 217 5, 4, 3, 2, Smer-SD SDKÚ-DS MKP ĽS-HZDS Most Híd SaS OĽaNO SIEŤ Sme Rodina Kotleba L 1,,
NÓRSKO-SLOVENSKÝ SPOLOK č. 3/2005
 minibudzogáň NÓRSKO-SLOVENSKÝ SPOLOK č. 3/2005 Záhada je pred rozlúštením V roku 2003 vznikla v Oslo "Spoločnosť priateľov Slovenska", ktorá patrí do sféry nášho záujmu, keďže sa týka vzťahov Nórska a
minibudzogáň NÓRSKO-SLOVENSKÝ SPOLOK č. 3/2005 Záhada je pred rozlúštením V roku 2003 vznikla v Oslo "Spoločnosť priateľov Slovenska", ktorá patrí do sféry nášho záujmu, keďže sa týka vzťahov Nórska a
POKYNY PRE NAVRHOVANIE vonkajších tepelnoizolačných kontaktných systémov stomixtherm alfa PUR
 Stránka 1 z 9 Tento dokument slúži ako predpis k navrhovaniu vonkajšieho tepelnoizolačného kontaktného systému (ďalej len ETICS alebo systém) s tepelnou izolácie z penového polystyrénu (EPS). I. Súvisiace
Stránka 1 z 9 Tento dokument slúži ako predpis k navrhovaniu vonkajšieho tepelnoizolačného kontaktného systému (ďalej len ETICS alebo systém) s tepelnou izolácie z penového polystyrénu (EPS). I. Súvisiace
ročník LI. editoriál Stanislava Repar: Pokračujeme! 2
 1 2 2016 ročník LI editoriál Stanislava Repar: Pokračujeme! 2 poézia Marián Milčák: vadomori, dekompozícia a iné básne 6 próza Slavka Liptáková: Sedembolestná (poviedka) 12 esej Peter Zajac: Chvála literatúry
1 2 2016 ročník LI editoriál Stanislava Repar: Pokračujeme! 2 poézia Marián Milčák: vadomori, dekompozícia a iné básne 6 próza Slavka Liptáková: Sedembolestná (poviedka) 12 esej Peter Zajac: Chvála literatúry
ÚZEM Ý PLÁ OBCE. Búč SMER Á ČASŤ
 ÚZEM Ý PLÁ OBCE Búč SMER Á ČASŤ Tento projekt bol realizovaný s finančnou pomocou Európskej únie z Európskeho fondu regionálneho rozvoja (ERDF) prostredníctvom Operačného programu Základná infraštruktúra,
ÚZEM Ý PLÁ OBCE Búč SMER Á ČASŤ Tento projekt bol realizovaný s finančnou pomocou Európskej únie z Európskeho fondu regionálneho rozvoja (ERDF) prostredníctvom Operačného programu Základná infraštruktúra,
Ročník 2011 OBSAH. Číslo 1 V Bratislave 27. januára 2011 Cena 8, Normalizácia. 2. Metrológia. 3. Skúšobníctvo. 4. Akreditácia. 5.
 Ročník 2011 Číslo 1 V Bratislave 27. januára 2011 Cena 8,81 OBSAH 1. Normalizácia Oznámenie ÚNMS SR č. 173/2011 o harmonizovaných STN k NV SR č. 513/2001 Z. z. v znení neskorších predpisov (jednoduché
Ročník 2011 Číslo 1 V Bratislave 27. januára 2011 Cena 8,81 OBSAH 1. Normalizácia Oznámenie ÚNMS SR č. 173/2011 o harmonizovaných STN k NV SR č. 513/2001 Z. z. v znení neskorších predpisov (jednoduché
Vyrobené so zmyslom pre detaily POTREBY PRE VČELÁROV
 Vyrobené so zmyslom pre detaily POTREBY PRE VČELÁROV 2012-2013 S radosťou Vám predstavujeme nový katalóg potrieb pre včelárov. Už 35 rokov pôsobíme na domácom a zahraničnom trhu. Získali sme tak vedomosti
Vyrobené so zmyslom pre detaily POTREBY PRE VČELÁROV 2012-2013 S radosťou Vám predstavujeme nový katalóg potrieb pre včelárov. Už 35 rokov pôsobíme na domácom a zahraničnom trhu. Získali sme tak vedomosti
SK CHLADNIČKA S MRAZNIČKOU BRUKSANVISNING 2 NÁVOD NA POUŽÍVANIE 19
 EN3453OOW NO KOMBISKAP SK CHLADNIČKA S MRAZNIČKOU BRUKSANVISNING 2 NÁVOD NA POUŽÍVANIE 19 2 www.electrolux.com INNHOLD 1. SIKKERHETSINFORMASJON...3 2. SIKKERHETSANVISNINGER...4 3. PRODUKTBESKRIVELSE...
EN3453OOW NO KOMBISKAP SK CHLADNIČKA S MRAZNIČKOU BRUKSANVISNING 2 NÁVOD NA POUŽÍVANIE 19 2 www.electrolux.com INNHOLD 1. SIKKERHETSINFORMASJON...3 2. SIKKERHETSANVISNINGER...4 3. PRODUKTBESKRIVELSE...
Nič nezastaví vašu flotilu
 Batérie pre komerčné vozidlá Nič nezastaví vašu flotilu Kompletný sortiment batérií pre všetky potreby komerčných vozidiel: StrongPRO EndurancePRO PowerPRO StartPRO PowerPRO Agri & Construction Vyrobené
Batérie pre komerčné vozidlá Nič nezastaví vašu flotilu Kompletný sortiment batérií pre všetky potreby komerčných vozidiel: StrongPRO EndurancePRO PowerPRO StartPRO PowerPRO Agri & Construction Vyrobené
Slovakia: Opinion
 For eldre meiningsmålingar, sjå dei neste sidene. Slovakia: Opinion 2014 2017 2014 2014 2014 2015 2015 Jan Jan Febr Febr Mars Mars April April Mai MaiJuni Juni Juli JuliAug AugSept Sept Okt Okt Nov Nov
For eldre meiningsmålingar, sjå dei neste sidene. Slovakia: Opinion 2014 2017 2014 2014 2014 2015 2015 Jan Jan Febr Febr Mars Mars April April Mai MaiJuni Juni Juli JuliAug AugSept Sept Okt Okt Nov Nov
ÚZEM Ý PLÁ OBCE. Moča
 ÚZEM Ý PLÁ OBCE Moča Tento projekt bol realizovaný s finančnou pomocou Európskej únie z Európskeho fondu regionálneho rozvoja (ERDF) prostredníctvom Operačného programu Základná infraštruktúra, ktorého
ÚZEM Ý PLÁ OBCE Moča Tento projekt bol realizovaný s finančnou pomocou Európskej únie z Európskeho fondu regionálneho rozvoja (ERDF) prostredníctvom Operačného programu Základná infraštruktúra, ktorého
Drevný odpad... Čo s ním?
 1. Úvod 1. ÚVOD Na Slovensku považujeme za základné energetické nosiče klasické palivá, ako uhlie, ropa, zemný plyn. Využívanie obnoviteľných energetických zdrojov je v podstate návrat k energetike starých
1. Úvod 1. ÚVOD Na Slovensku považujeme za základné energetické nosiče klasické palivá, ako uhlie, ropa, zemný plyn. Využívanie obnoviteľných energetických zdrojov je v podstate návrat k energetike starých
Příručka pro omezenou záruku a podporu. Príručka pre obmedzenú záruku a podporu
 Příručka pro omezenou záruku a podporu Príručka pre obmedzenú záruku a podporu Příručka pro omezenou záruku a podporu Prohlášení o záruce Licenční smlouva s koncovým uživatelem Prohlášení o shodě Provozní
Příručka pro omezenou záruku a podporu Príručka pre obmedzenú záruku a podporu Příručka pro omezenou záruku a podporu Prohlášení o záruce Licenční smlouva s koncovým uživatelem Prohlášení o shodě Provozní
Návrh ROZHODNUTIE EURÓPSKEHO PARLAMENTU A RADY
 EURÓPSKA KOMISIA V Bruseli 28. 1. 2014 COM(2014) 45 final Návrh ROZHODNUTIE EURÓPSKEHO PARLAMENTU A RADY o mobilizácii Európskeho fondu na prispôsobenie sa globalizácii v súlade s bodom 28 Medziinštitucionálnej
EURÓPSKA KOMISIA V Bruseli 28. 1. 2014 COM(2014) 45 final Návrh ROZHODNUTIE EURÓPSKEHO PARLAMENTU A RADY o mobilizácii Európskeho fondu na prispôsobenie sa globalizácii v súlade s bodom 28 Medziinštitucionálnej
Slovakia: Opinion
 Jan 9 Feb juli Feb 11 juli Feb 12 nov Jan 13 Feb 14 Febr 15 Slovakia: Opinion 9 15 5,,,, Smer-SD SDKÚ-DS MKP ĽS-HZDS Most Híd SaS OĽaNO SIEŤ,, ĽS-HZDS Rørsla for eit demokratisk Slovakia Smer-SD Retning
Jan 9 Feb juli Feb 11 juli Feb 12 nov Jan 13 Feb 14 Febr 15 Slovakia: Opinion 9 15 5,,,, Smer-SD SDKÚ-DS MKP ĽS-HZDS Most Híd SaS OĽaNO SIEŤ,, ĽS-HZDS Rørsla for eit demokratisk Slovakia Smer-SD Retning
Riedidlo na strieborný vodivý lak 5 ml faštika obj..:
 SK - N Á V O D N A M O N T Á Ž A O B S L U H U : Obj..: 52 99 71 www.conrad.sk Riedidlo na strieborný vodivý lak 5 ml faštika obj..: 52 99 71 LIST S BEZPENOSTNÝMI ÚDAJMI (91/155/EWG) RIEDIDLO 14 G 9568100222
SK - N Á V O D N A M O N T Á Ž A O B S L U H U : Obj..: 52 99 71 www.conrad.sk Riedidlo na strieborný vodivý lak 5 ml faštika obj..: 52 99 71 LIST S BEZPENOSTNÝMI ÚDAJMI (91/155/EWG) RIEDIDLO 14 G 9568100222
NÓRSKO-SLOVENSKÝ SPOLOK č. 4/2003
 minibudzogáň NÓRSKO-SLOVENSKÝ SPOLOK č. 4/2003 Moje Nórsko Nórsko bola pre mňa už od mala vysnívaná krajina, sedela som pred TV a bezdôvodne fandila všetkým nórskym športovcom, snažiac sa naučiť ich pre
minibudzogáň NÓRSKO-SLOVENSKÝ SPOLOK č. 4/2003 Moje Nórsko Nórsko bola pre mňa už od mala vysnívaná krajina, sedela som pred TV a bezdôvodne fandila všetkým nórskym športovcom, snažiac sa naučiť ich pre
Matematika NÁRODNÉ POROVNÁVACIE SKÚŠKY ZADANIE NEOTVÁRAJTE, POČKAJTE NA POKYN! MAREC I 2018
 NÁRODNÉ POROVNÁVACIE SKÚŠKY Mtemtik MAREC I 08 ZADANIE NEOTVÁRAJTE, POČKAJTE NA POKYN! Zopkujte si zákldí iformce ke zkoušce Test obshuje 0 úloh. N jeho riešeie máte 90 miút čistého čsu. Kždá úloh má správu
NÁRODNÉ POROVNÁVACIE SKÚŠKY Mtemtik MAREC I 08 ZADANIE NEOTVÁRAJTE, POČKAJTE NA POKYN! Zopkujte si zákldí iformce ke zkoušce Test obshuje 0 úloh. N jeho riešeie máte 90 miút čistého čsu. Kždá úloh má správu
Quick Start Guide. 720p 5MP HD Webcam Model No. AWC113. Hurtigstartguide. Snabbstartguide. Pikaopas. Startvejledning.
 Quick Start Guide Quick Start Guide UK Hurtigstartguide NO Snabbstartguide SE Pikaopas FI Startvejledning DK Stručná příručka CZ Stručný návod na používanie SK 720p 5MP HD Webcam Model No. AWC113 Content
Quick Start Guide Quick Start Guide UK Hurtigstartguide NO Snabbstartguide SE Pikaopas FI Startvejledning DK Stručná příručka CZ Stručný návod na používanie SK 720p 5MP HD Webcam Model No. AWC113 Content
PROGRAM HOSPODÁRSKEHO A SOCIÁLNEHO ROZVOJA OBCE TIBAVA NÁVRH. Strana 1 z 54. Program hospodárskeho a sociálneho rozvoja obce Tibava na roky
 NÁVRH PROGRAM HOSPODÁRSKEHO A SOCIÁLNEHO ROZVOJA OBCE TIBAVA Názov: Územné vymedzenie: Územný plán obce (Spoločný ÚPN-O Tibava, Vojnatina, Kolibabovce) schválený pre k.ú. obce Tibava: Program hospodárskeho
NÁVRH PROGRAM HOSPODÁRSKEHO A SOCIÁLNEHO ROZVOJA OBCE TIBAVA Názov: Územné vymedzenie: Územný plán obce (Spoločný ÚPN-O Tibava, Vojnatina, Kolibabovce) schválený pre k.ú. obce Tibava: Program hospodárskeho
EME2016 Proceedings. Primární matematické vzd lávání v souvislostech
 EME2016 Proceedings Primární matematické vzd lávání v souvislostech 21. ro ník v decké konference s mezinárodní ú astí Elementary Mathematics Education Primary mathematics education in context 21st scientific
EME2016 Proceedings Primární matematické vzd lávání v souvislostech 21. ro ník v decké konference s mezinárodní ú astí Elementary Mathematics Education Primary mathematics education in context 21st scientific
Ročník 2012 OBSAH. Číslo 10 V Bratislave 29. októbra 2012 Cena 8, Normalizácia. 2. Metrológia. 3. Skúšobníctvo. 4. Akreditácia. 5.
 Ročník 2012 Číslo 10 V Bratislave 29. októbra 2012 Cena 8,88 OBSAH 1. Normalizácia Oznámenie ÚNMS SR č. 211/2012 o harmonizovaných STN k zákonu č. 576/2002 Z. z. (tlakové zariadenie) v znení neskorších
Ročník 2012 Číslo 10 V Bratislave 29. októbra 2012 Cena 8,88 OBSAH 1. Normalizácia Oznámenie ÚNMS SR č. 211/2012 o harmonizovaných STN k zákonu č. 576/2002 Z. z. (tlakové zariadenie) v znení neskorších
ŠPORTINFORM. ČASOPIS PRE TELOVÝCHOVNÉ JEDNOTY, KLUBY A SPOLKY Finančne podporovaný MŠVVaŠ SR. vitamíny a minerály pre zdravie (7)
") ŠPORTINFORM ČASOPIS PRE TELOVÝCHOVNÉ JEDNOTY, KLUBY A SPOLKY Finančne podporovaný MŠVVaŠ SR Čo nájdete v čísle? Športinform aj na www.sporting.sk 6 14. 12. 2012 ročník XXII. zákazané dopingové látky a
ŠPORTINFORM ČASOPIS PRE TELOVÝCHOVNÉ JEDNOTY, KLUBY A SPOLKY Finančne podporovaný MŠVVaŠ SR Čo nájdete v čísle? Športinform aj na www.sporting.sk 6 14. 12. 2012 ročník XXII. zákazané dopingové látky a
Veľa úspechov v súťaži a veľa zábavy s matematikou v budúcnosti.
 INŠTRUKCIE K TESTU Na vyriešenie 25 otázok máte 45 minút. Správna je vždy len jedna odpoveď. Ak napriek tomu zvolíte viacero správnych odpovedí, úloha sa bude hodnotiť ako nevyriešená! Podobne, ak sa v
INŠTRUKCIE K TESTU Na vyriešenie 25 otázok máte 45 minút. Správna je vždy len jedna odpoveď. Ak napriek tomu zvolíte viacero správnych odpovedí, úloha sa bude hodnotiť ako nevyriešená! Podobne, ak sa v
P r o g r a m h o s p o d á r s k e h o a s o c i á l n e h o r o z v o j a o b c e B a d í n P r o g r a m o v a c i e o b d o b i e
 P r o g r a m o v a c i e o b d o b i e 2 0 1 3-2 0 2 2 P ROGRAM HOSPODÁRSKEHO A SOCIÁLNEHO ROZVOJA O B C E BADÍN P ROGRAMOVACIE OBDOBIE 2013-2022 P r o g r a m o v a c i e o b d o b i e 2 0 1 3-2 0 2
P r o g r a m o v a c i e o b d o b i e 2 0 1 3-2 0 2 2 P ROGRAM HOSPODÁRSKEHO A SOCIÁLNEHO ROZVOJA O B C E BADÍN P ROGRAMOVACIE OBDOBIE 2013-2022 P r o g r a m o v a c i e o b d o b i e 2 0 1 3-2 0 2
ÚDAJE O OBSTARÁVATEĽOVI A SPRACOVATEĽOVI Obstarávateľ: Mesto Nitra v zastúpení: Mestský úrad v Nitre Štefánikova trieda č.
 ZÁKLADNÉ ÚDAJE ÚDAJE O OBSTARÁVATEĽOVI A SPRACOVATEĽOVI Obstarávateľ: Mesto Nitra v zastúpení: Mestský úrad v Nitre Štefánikova trieda č. 60 94901 Nitra Poverená osoba za obstaranie: Ing. arch. Eva Ligačová
ZÁKLADNÉ ÚDAJE ÚDAJE O OBSTARÁVATEĽOVI A SPRACOVATEĽOVI Obstarávateľ: Mesto Nitra v zastúpení: Mestský úrad v Nitre Štefánikova trieda č. 60 94901 Nitra Poverená osoba za obstaranie: Ing. arch. Eva Ligačová
Ing. arch. Ľubomír Polák - autorizovaný architekt
 Ing. arch. Ľubomír Polák - autorizovaný architekt 08001 Prešov, Októbrová 44; ateliér: Prešov, Požiarnická 17, tel. 0907128516 e-mail:ubopolak@orangemail.sk Návrh územného plánu obce (ÚPN-O) HERMANOVCE
Ing. arch. Ľubomír Polák - autorizovaný architekt 08001 Prešov, Októbrová 44; ateliér: Prešov, Požiarnická 17, tel. 0907128516 e-mail:ubopolak@orangemail.sk Návrh územného plánu obce (ÚPN-O) HERMANOVCE
ROČNÍK XLIII LANOVÁ DOPRAVA CESTOVNÝ RUCH MANAŽMENT MARKETING. Inovatívna jazda v lomenej trase pre trojlanovú 3S lanovku
 ROČNÍK XLIII LANOVÁ DOPRAVA CESTOVNÝ RUCH MANAŽMENT MARKETING Inovatívna jazda v lomenej trase pre trojlanovú 3S lanovku 2016 sons. Obsah Service 1 Príhovor 2 Vydáva: LAVEX, Lanovky a vleky, záujmové združenie
ROČNÍK XLIII LANOVÁ DOPRAVA CESTOVNÝ RUCH MANAŽMENT MARKETING Inovatívna jazda v lomenej trase pre trojlanovú 3S lanovku 2016 sons. Obsah Service 1 Príhovor 2 Vydáva: LAVEX, Lanovky a vleky, záujmové združenie
Katalóg výrobkov Zváracia technika a systémy ochrany proti opotrebovaniu
 Katalóg výrobkov Technológia horákov InFocus pre výsledky spájania v takmer laserovej kvalite; viac na strane 22 Zváracia technika a systémy ochrany proti opotrebovaniu www.kjellberg.de Odhodlaný človek
Katalóg výrobkov Technológia horákov InFocus pre výsledky spájania v takmer laserovej kvalite; viac na strane 22 Zváracia technika a systémy ochrany proti opotrebovaniu www.kjellberg.de Odhodlaný človek
ÚZEMNÝ PLÁN MESTA HRIŇOVÁ NÁVRH
 URBAN TRADE, projektová kancelária, Ing. arch. Dušan Hudec Letná 45, 040 01 Košice, www.urban.sk, urban@urban.sk ÚZEMNÝ PLÁN MESTA HRIŇOVÁ NÁVRH SPRIEVODNÁ SPRÁVA ČISTOPIS SEPTEMBER 2012 Tento projekt
URBAN TRADE, projektová kancelária, Ing. arch. Dušan Hudec Letná 45, 040 01 Košice, www.urban.sk, urban@urban.sk ÚZEMNÝ PLÁN MESTA HRIŇOVÁ NÁVRH SPRIEVODNÁ SPRÁVA ČISTOPIS SEPTEMBER 2012 Tento projekt
ODBORNÝ ČASOPIS 3-4/2011
 ODBORNÝ ČASOPIS 3-4/2011 BOLESŤ PRÍPRAVKY S KETOPROFÉNOM LEN NA LEKÁRSKY PREDPIS Konferencia Odborná konferencia 11. 3. 2011 hotel Dixon, Banská Bystrica Editoriál Odborný časopis pre lekárnikov a laborantov,
ODBORNÝ ČASOPIS 3-4/2011 BOLESŤ PRÍPRAVKY S KETOPROFÉNOM LEN NA LEKÁRSKY PREDPIS Konferencia Odborná konferencia 11. 3. 2011 hotel Dixon, Banská Bystrica Editoriál Odborný časopis pre lekárnikov a laborantov,
1 Vår onn med nye mu lig he ter. Ver di ska ping på vest lands byg de ne ba sert på res sur ser og opp le vel ser
 Innhold 1 Vår onn med nye mu lig he ter. Ver di ska ping på vest lands byg de ne ba sert på res sur ser og opp le vel ser Gre te Rus ten, Leif E. Hem og Nina M. Iver sen 13 Po ten sia let i uli ke mål
Innhold 1 Vår onn med nye mu lig he ter. Ver di ska ping på vest lands byg de ne ba sert på res sur ser og opp le vel ser Gre te Rus ten, Leif E. Hem og Nina M. Iver sen 13 Po ten sia let i uli ke mål
AGENTÚRA NA PODPORU VÝSKUMU A VÝVOJA
 AGENTÚRA NA PODPORU VÝSKUMU A VÝVOJA 7. Rámcový program pravidlá účasti a ich dopad na zapojenie výskumu Štruktúra Pravidlá Financie ČO PONÚKA RP? Široké príležitosti pre výskum Podporu inovácií výrobkov,
AGENTÚRA NA PODPORU VÝSKUMU A VÝVOJA 7. Rámcový program pravidlá účasti a ich dopad na zapojenie výskumu Štruktúra Pravidlá Financie ČO PONÚKA RP? Široké príležitosti pre výskum Podporu inovácií výrobkov,
SVETOVÝ ANTIDOPINGOVÝ KÓDEX MEDZINÁRODNÁ NORMA
 SVETOVÝ ANTIDOPINGOVÝ KÓDEX MEDZINÁRODNÁ NORMA ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD JANUÁR 2019 V prípade akýchkoľvek nezrovnalostí medzi oficiálnym textom a slovenskou verziou je rozhodujúce anglické znenie.
SVETOVÝ ANTIDOPINGOVÝ KÓDEX MEDZINÁRODNÁ NORMA ZOZNAM ZAKÁZANÝCH LÁTOK A METÓD JANUÁR 2019 V prípade akýchkoľvek nezrovnalostí medzi oficiálnym textom a slovenskou verziou je rozhodujúce anglické znenie.
Mama Ako nežne znie to jednoduché slovo s hlbokým obsahom. Je naším prvým, aj posledným slovom. Z OBSAHU VYBERÁME: ročník XI. číslo 2 apríl 2013
 Z OBSAHU VYBERÁME: Separovaný zber Ako sa prepadol kôň do jaskyne Alhambra Marec mesiac knihy ročník XI. číslo 2 apríl 2013 Pohyb bez bariér JAR tri písmená, ktoré v sebe ukrývajú začiatok nového života.
Z OBSAHU VYBERÁME: Separovaný zber Ako sa prepadol kôň do jaskyne Alhambra Marec mesiac knihy ročník XI. číslo 2 apríl 2013 Pohyb bez bariér JAR tri písmená, ktoré v sebe ukrývajú začiatok nového života.
Číslo 5 V Bratislave 27. mája 2014 Cena 7,40 OBSAH
 Ročník 2014 Číslo 5 V Bratislave 27. mája 2014 Cena 7,40 1. Normalizácia OBSAH Oznámenie ÚNMS SR č. 248/2014 o harmonizovaných STN k NV SR č. 513/2001 Z. z. v znení neskorších predpisov (jednoduché tlakové
Ročník 2014 Číslo 5 V Bratislave 27. mája 2014 Cena 7,40 1. Normalizácia OBSAH Oznámenie ÚNMS SR č. 248/2014 o harmonizovaných STN k NV SR č. 513/2001 Z. z. v znení neskorších predpisov (jednoduché tlakové
V. Franc, R. Malina & M. Škodová: Základy biogeografie a ekológie
 V. Franc, R. Malina & M. Škodová: Základy biogeografie a ekológie M 2 V. Franc, R. Malina & M. Škodová: Základy biogeografie a ekológie Predhovor Cieľom učebnice «Základy biogeografie a ekológie» je poskytnúť
V. Franc, R. Malina & M. Škodová: Základy biogeografie a ekológie M 2 V. Franc, R. Malina & M. Škodová: Základy biogeografie a ekológie Predhovor Cieľom učebnice «Základy biogeografie a ekológie» je poskytnúť
PowerOffice Mobile Server
 PowerOffice Mobile Server 20 14 Po we ro ffice AS - v20 12.1.0 PowerOffice SQL - PowerOffice Mobile Server Alle rettigheter reservert. Ingen deler av dette arbeidet kan reproduseres i noen form eller på
PowerOffice Mobile Server 20 14 Po we ro ffice AS - v20 12.1.0 PowerOffice SQL - PowerOffice Mobile Server Alle rettigheter reservert. Ingen deler av dette arbeidet kan reproduseres i noen form eller på
Dospelí dosiahli plánované ciele
 22 4 / 2006 TK Slovan Slovenská sporiteľňa Bratislava mal výročnú členskú schôdzu Dospelí dosiahli plánované ciele Veľká tenisová rodina Slovana Slovenská sporiteľňa Bratislava sa aj v tomto roku stretla
22 4 / 2006 TK Slovan Slovenská sporiteľňa Bratislava mal výročnú členskú schôdzu Dospelí dosiahli plánované ciele Veľká tenisová rodina Slovana Slovenská sporiteľňa Bratislava sa aj v tomto roku stretla
504606-67 CZ/SK DW099
 504606-67 CZ/SK DW099 2 3 4 5 6 CZ VНCEBODOVБ LASEROVБ VODOVБHA DW099 Blahopшejeme Vбm! Zvolili jste si nбшadн spoleиnosti DEWALT. Roky zkuљenostн, dщkladnэ vэvoj vэrobkщ a inovace vytvoшily ze spoleиnosti
504606-67 CZ/SK DW099 2 3 4 5 6 CZ VНCEBODOVБ LASEROVБ VODOVБHA DW099 Blahopшejeme Vбm! Zvolili jste si nбшadн spoleиnosti DEWALT. Roky zkuљenostн, dщkladnэ vэvoj vэrobkщ a inovace vytvoшily ze spoleиnosti
Ročník 2015 OBSAH. Číslo 11 V Bratislave 27. novembra 2015 Cena 8, Normalizácia. 2. Metrológia. 3. Skúšobníctvo. 4. Akreditácia. 5.
 Ročník 2015 Číslo 11 V Bratislave 27. novembra 2015 Cena 8,95 OBSAH 1. Normalizácia Oznámenie ÚNMS SR č. 281/2015 o harmonizovaných STN k NV SR č. 399/1999 Z. z. v znení neskorších predpisov (váhy s neautomatickou
Ročník 2015 Číslo 11 V Bratislave 27. novembra 2015 Cena 8,95 OBSAH 1. Normalizácia Oznámenie ÚNMS SR č. 281/2015 o harmonizovaných STN k NV SR č. 399/1999 Z. z. v znení neskorších predpisov (váhy s neautomatickou
LIESKOVEC ÚZEMNÝ PLÁN OBCE TEXTOVÁ ČASŤ
 ÚZEMNÝ PLÁN OBCE LIESKOVEC TEXTOVÁ ČASŤ Objednávateľ : OBEC LIESKOVEC Zhotoviteľ : Ing. arch. Anton Supuka autorizovaný architekt SKA LANDURBIA B. Bystrica Č. zákazky : 1/2006 Dátum : August 2008 1 SPRACOVATEĽSKÝ
ÚZEMNÝ PLÁN OBCE LIESKOVEC TEXTOVÁ ČASŤ Objednávateľ : OBEC LIESKOVEC Zhotoviteľ : Ing. arch. Anton Supuka autorizovaný architekt SKA LANDURBIA B. Bystrica Č. zákazky : 1/2006 Dátum : August 2008 1 SPRACOVATEĽSKÝ
Kom igang: En enkel innføring i bruk av en håndholdt spektrum analysator.
 Kom igang: En enkel innføring i bruk av en håndholdt spektrum analysator. Først litt generelt om instrumentet: Spektrum analysator MS 2711 er en batteridrevet analysator som veier ca 2 kg og måler i frekvensområdet
Kom igang: En enkel innføring i bruk av en håndholdt spektrum analysator. Først litt generelt om instrumentet: Spektrum analysator MS 2711 er en batteridrevet analysator som veier ca 2 kg og måler i frekvensområdet
SLOVENSKÉ VIANOCE SO SĽUKOM
 OBČASNÍK OBČANOV OBCE KOZÁROVCE ROČNÍK IX. číslo 4 december 2015 Slovo na úvod Blížia sa najkrajšie sviatky roka, síce bez snehu a ľadu, ale sú tu. Všetci sa budeme snažiť po každoročnom uponáhľanom období
OBČASNÍK OBČANOV OBCE KOZÁROVCE ROČNÍK IX. číslo 4 december 2015 Slovo na úvod Blížia sa najkrajšie sviatky roka, síce bez snehu a ľadu, ale sú tu. Všetci sa budeme snažiť po každoročnom uponáhľanom období
DO ŽIV LJA JI HAK L BE RI JA FI NA
 Mark Tven DO ŽIV LJA JI HAK L BE RI JA FI NA Nas lov ori gi na la Mark Twa in Adven tu res of Huc k le ber ry Finn 1884 Pre vod Je li sa ve ta Mar ko vić Beleška Ko po ku ša da na đe ne ku po bu du u ovom
Mark Tven DO ŽIV LJA JI HAK L BE RI JA FI NA Nas lov ori gi na la Mark Twa in Adven tu res of Huc k le ber ry Finn 1884 Pre vod Je li sa ve ta Mar ko vić Beleška Ko po ku ša da na đe ne ku po bu du u ovom
Prílohy 6SUiYD $55$ +RGQRWHQLH Y\VRNêFK ãn{o D LFK IDN~OW
 Prílohy 1 Zoznam príloh Príloha 1 Príloha 2 Príloha 3 Príloha 4a Príloha 4b Príloha 4c Príloha 4d Príloha 4e Príloha 5 Frascati manuál, rozdelenie fakúlt Rozdelenie indikátorov do skupín a metodika hodnotenia
Prílohy 1 Zoznam príloh Príloha 1 Príloha 2 Príloha 3 Príloha 4a Príloha 4b Príloha 4c Príloha 4d Príloha 4e Príloha 5 Frascati manuál, rozdelenie fakúlt Rozdelenie indikátorov do skupín a metodika hodnotenia
GSM monitor včelých úľov. Operchip UM G B
 GSM monitor včelých úľov Operchip UM G B Vzdialený monitoring včelých úľov cez GSM sieť a zabezpečenie objektu včelína. Zobrazenie spracovaných hodnôt meraní, udalostí a alarmov cez SMS a WEB rozhranie.
GSM monitor včelých úľov Operchip UM G B Vzdialený monitoring včelých úľov cez GSM sieť a zabezpečenie objektu včelína. Zobrazenie spracovaných hodnôt meraní, udalostí a alarmov cez SMS a WEB rozhranie.
Ročník IV. Číslo 4. November 2006
 Ročník IV. Číslo 4. November 2006, Kominárstvo je tradične významné verejnoprospešné remeslo, zamerané na odstraňovanie sadzí z murovaných komínov aby tieto nespôsobili požiar, a aby komíny fungovali účinne
Ročník IV. Číslo 4. November 2006, Kominárstvo je tradične významné verejnoprospešné remeslo, zamerané na odstraňovanie sadzí z murovaných komínov aby tieto nespôsobili požiar, a aby komíny fungovali účinne
Ing. arch. Ľubomír Polák - autorizovaný architekt
 Ing. arch. Ľubomír Polák - autorizovaný architekt 08001 Prešov, Októbrová 44; ateliér: Prešov, Požiarnická 17, tel. 0907128516 e-mail:ubopolak@orangemail.sk Návrh územného plánu obce (ÚPN-O) HERMANOVCE
Ing. arch. Ľubomír Polák - autorizovaný architekt 08001 Prešov, Októbrová 44; ateliér: Prešov, Požiarnická 17, tel. 0907128516 e-mail:ubopolak@orangemail.sk Návrh územného plánu obce (ÚPN-O) HERMANOVCE
LUPAUSL13E. Instruction Manual 65W Notebook Power Adaptor. Instruksjonsmanual 65 W strømadapter for bærbare datamaskiner
 LUPAUSL13E Instruction Manual 65W Notebook Power Adaptor Instruksjonsmanual 65 W strømadapter for bærbare datamaskiner Instruktionsbok 65 W strömadapter för bärbar dator Käyttöopas Kannettavan tietokoneen
LUPAUSL13E Instruction Manual 65W Notebook Power Adaptor Instruksjonsmanual 65 W strømadapter for bærbare datamaskiner Instruktionsbok 65 W strömadapter för bärbar dator Käyttöopas Kannettavan tietokoneen
INNKALLING TIL ORDINÆRT SAMEIERMØTE 2010
 INNKALLING TIL ORDINÆRT SAMEIERMØTE 2010 O r d i n æ r t s am e i e rm øt e i S am B o B o l i g s am e i e, a v h o l d es o ns d a g 2 8. 04. 2 0 1 0, k l. 1 8. 3 0 i G r ef s e n m e n i g h e t s s
INNKALLING TIL ORDINÆRT SAMEIERMØTE 2010 O r d i n æ r t s am e i e rm øt e i S am B o B o l i g s am e i e, a v h o l d es o ns d a g 2 8. 04. 2 0 1 0, k l. 1 8. 3 0 i G r ef s e n m e n i g h e t s s