Arduino bilen er en selvgående liten robot. Roboten består av:
|
|
|
- Kari Ødegaard
- 6 år siden
- Visninger:
Transkript
1 1. Arduino Bil Arduino bilen er en selvgående liten robot. Roboten består av: En Robot base som er 3D printet 3 Litium-ion batterier En Arduino Uno Kodegenets Motorkontrollerkort Fire likestrømsmotorer og fire hjul En Ultrasonisk avstandssensor. Fire infrarøde lamper og mottakere for at roboten skal kunne følge en linje Roboten finnes i tre variasjoner: 1. Alle hoveddeler på bilen er 3D printet. Dette gjelder basen, motorholdere, batteripakke og linjesensor-holder. (ca. 5 timer print-tid) 2. Noen av hoveddelene er 3D printet. Her er basen og motorholderne byttet ut med henholdsvis laserkuttet akrylplast og aluminium. (ca. 2,5 timer print-tid) 3. Enkelte 3D printede deler Her er også batteriholderen byttet ut med en ferdig model i støpt plast. (ca 80 minutter print tid) I Teknoboksen ligger den tredje modellen. Sammenbyggingen av roboten er ganske lik for alle modellene. 2. Bygge sammen roboten Vi skal starte med å bygge sammen robotens base. Basen er en rektangulær del med hull til både skruer og muttere slik at alle delene til roboten kan moteres enkelt. På den 3D printede basen festes motorholderne på siden av basen, mens motorholderne i metall festes på undersiden av basen. På undersiden sitter en batteripakke som tar 3 Litium-ion batterier av typen Byggeprosessen består av 5 steg, og vi skal starte med å fullføre de første 3 nå før vi skal programmere Arduinoen litt. Pass på at skruene ikke festes så godt at plastdelene skrus i stykker eller knekker. Fingerfast er et godt nøkkelord her.




2 Dokumentet er et foreløpig utkast 2.1. Steg 1, 3D printet base Vi starter med å skru motorfestene til basen. Til det trenger vi: 3D printede basen 4 stk. Motorfester 8 stk M3 muttere og 8 stk M3x16mm skruer. Motorfestene monterer vi fast på siden av robot-basen, og de skal skrus fast slik at den helt flate siden av motorholderne peker utover på høyre og venstre side. Pass på at robotbasen er helt flat på undersiden av roboten. 1 8 stk 8 stk M3 M3x16 Figur 1 Vi starter med å skru motor-festene til basen Muttere Skruer
3 Dokumentet er et foreløpig utkast 2.2. Steg 1, base i akrylplast Vi starter med å skru motorfestene til basen. Til det trenger vi 4 stk. Motorfester i metal (i egne poser med skruer og fester) Robotbasen i akrylplast Motorfestene monterer vi fast på undersiden av robot-basen. Det er ingen opp eller ned på platen. 1 8 stk 8 stk M3 M3x16 Figur 2 Vi starter med å skru motor-festene til basen Muttere Skruer



.")
4 Dokumentet er et foreløpig utkast 2.3. Steg 2 3D printet base Det neste steget er å montere motorene fast i motorfestene. Til det trenger vi: 8 M3 muttere og 8 M3x25mm skruer 4 motorer Her er det viktig at motorene festes slik at de er på utsiden av roboten, og at lederne/ledningene på motorene peker utover (og ikke inn mot midten av robotbasen). 2 8 stk 8 stk M3 M3x25 Figur 3 Vi skrur motorene til motorfestene Muttere Skruer
5 Dokumentet er et foreløpig utkast 2.4. Steg 2 base i akrylplast Det neste steget er å montere motorene fast i motorfestene. Til det trenger vi: 8 M3 muttere og tilhørende lange skruer (i posen sammen med motorfestene) 8 stk motorer Her er det viktig at motorene festes slik at de er på utsiden av roboten, og at lederne på motorene peker utover (og ikke inn mot midten av robotbasen). 2 8 stk 8 stk M3 M3x25 Figur 3 Vi skrur motorene til motorfestene Muttere Skruer




6 Dokumentet er et foreløpig utkast 2.5. Steg 3, 3D printet batteriholder Batteriholderen monteres på undersiden av roboten. Vi trenger: Batteriholderen 2 lange ledninger og 2 korte ledninger 3 fjærer og 3 mottakere 3 M3 muttere og 3 M3x10mm skruer Batteriholderen festes med 3 stk. M3x10 skruer og 4stk M3 mutteren. Det spiller ingen rolle hvilken side mutteren og skruen er på. Batteriene skal seriekobles, slik at man lodder positiv til negativ mellom batteri 1 og batteri 2, og batteri 2 og batteri 3. De lange ledningene går fra hver sin ende, og sammenkobles med den røde pluggen. 3 2 stk 2 stk M3 M3x10 Figur 4 Vi monterer på batteriholderen Muttere Skruer
7 Dokumentet er et foreløpig utkast 2.6. Steg 3, Støpt batteriholder Batteriholderen monteres på undersiden av roboten. Vi trenger: Batteriholderen 2 3D printede deler for å feste batteripakken til undersiden av basen 6 M3 muttere og 6 M3x10mm skruer Batteriholderen festes første til de 3D printede delene. Det er en egen del for høyre side og en for venstre side (de passer bare én vei). Disse festes med 2 muttere og skuer. Deretter festes de 3D printede delene til undersiden av roboten med 4 M3 muttere og skruer. 3 2 stk 2 stk M3 M3x10 Figur 4 Vi monterer på batteriholderen Muttere Skruer


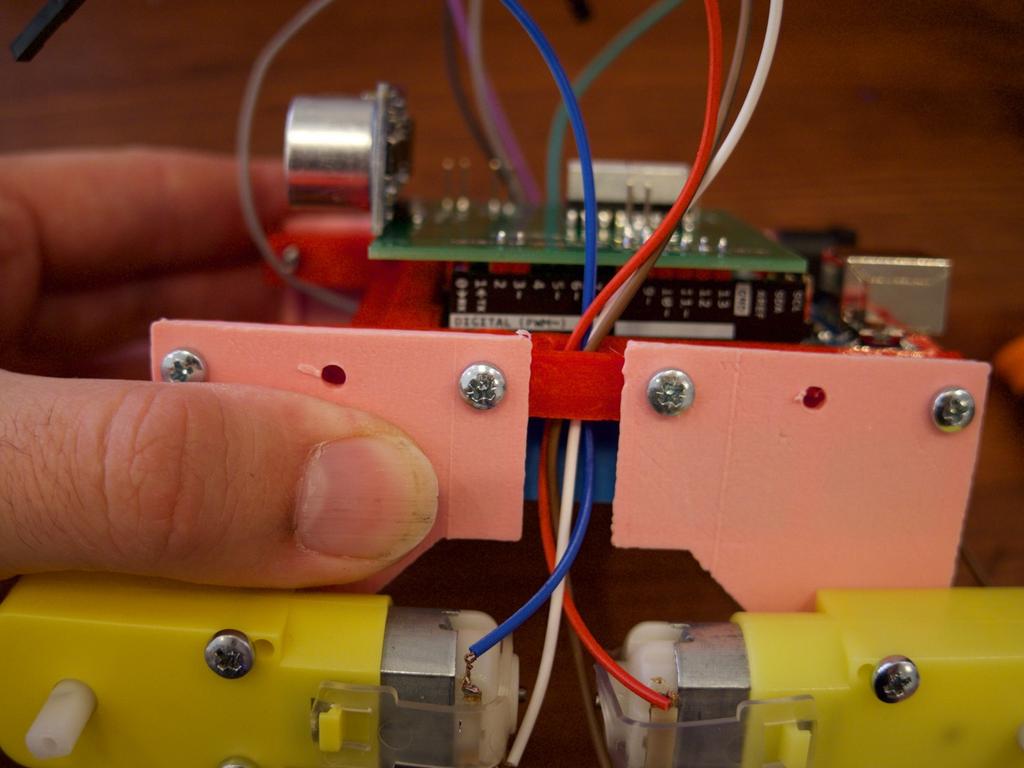
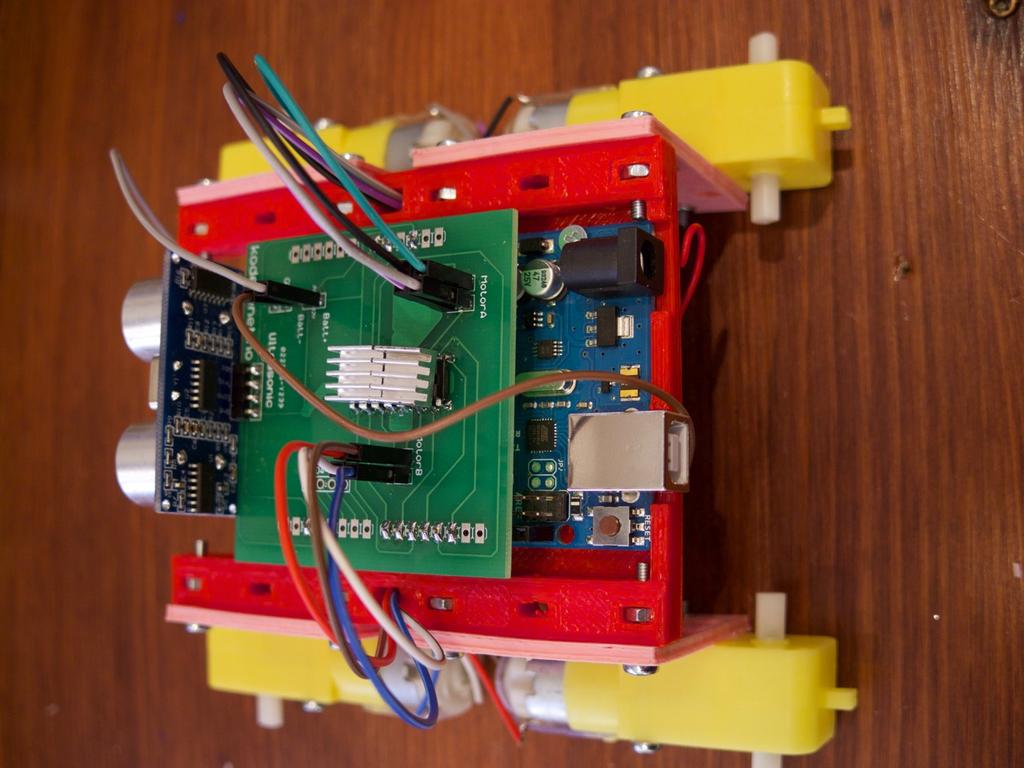
8 Dokumentet er et foreløpig utkast 2.7. Steg 4 - Koblinger 4 Figur 5 Vi monterer motorkontrollerkortet på toppen av Arduinoen, samt alle ledninger

9 Steg 4,5 Koble motorene riktig 4.5 Figur 6 Ledningen fra motorene kobles på hver sin kolonne på kortet

10 Steg 5 - hjul Figur 1.1 Arduino Robot
11 3. Programmere roboten til å unngå hindringer Den første oppgaven, etter at alle ledningene er koblet på, er å få bilen til å kjøre rett fremover. For å gjøre programmeringen enklere, skal vi programmere roboten ved hjelp av Blockuino.no. Blockuino er det relativt enkelt å komme i gang med. Klosslisten - her finnes alle klossene vi kan bruke Scriptområdet - Her finnes alle klossene vi har lagt til i programmet vårt Kodeområdet - Her lages koden som vi skal overføre til Arduinoen Knapperad - Her finnes alle funksjonsknappene Figur 1.2 Vi bruker Blockuino.no for å programmere roboten Bilen styres ved at vi slår av og på signal-strømmen til portene som er koblet til kretskortet. Her må vi fortelle Arduinoen hvilke 6 porter som benyttes for å prate med motorkontrolleren, samt hvilke 2 porter som vi bruker for å kommunisere med avstandsmåleren. I tillegg må vi fortelle hvor raskt vi ønsker at bilen skal kjøre. Aller først må vi legge til 2 klosser, setup-klossen og loop-klossen. Disse klossen må vi alltid ha med når vi skal programmere Arduino.

12 Vi trekker ut en Setup-kloss og en Loop-kloss fra Klosslisen til Scriptområdet Legg merke til at vi får generert Arduino-koden automatisk i Kodeområdet. Figur 1.3 Vi trekker ut en Setup og en loop kloss Deretter må vi initialisere både motorkontrolleren og avstandssensoren. Det gjør vi ved å trekke ut initialiser-klossene fra Sensorer -> Ultrasonisk Sensor og Motorer -> Arduino Bil. Figur 1.3 Vi trekker ut initialiser-klosser for motorkontrolleren og avstandssensoren


13 Deretter må vi fortelle hvilke porter kontrolleren og sensoren er koblet til. Denne informasjonen finner vi printet på fremsiden av Arduino-tilleggskortet. Vi trekker ut en verdi-klosser til alle hullene i initialiserklossene Figur 1.5 Vi forteller hvilke porter komponentene våre er koblet til Vi har nå fortalt Arduinoen hvilke porter vi har koblet komponentene våre til. Deretter må vi inne i setup-klossen trekke ut to setup-klossser. En for motorkontrolleren og en for avstandssensoren. Vi trekker ut en setup kloss for hver av komponentene. Disse plasserer vi inne i setup-klossen Figur 1.6 Vi trekker ut en setup-kloss for hver av komponentene våre



14 Nå er vi ferdig med oppsettet av Arduino roboten. Det neste vi skal gjøre da er å få bilen til å kjøre fremover. Til det trenger vi faktisk kun 2 klosser. En kloss som forteller at roboten skal kjøre fremover, og en kloss som forteller at roboten skal vente litt før den fortsetter til neste kloss. Vi forteller motrokontrolleren at den skal kjøre fremover, før lar Arduinoen venter i 50 millisekunder på neste kommando Figur 1.7 Vi lar bilen kjøre fremover Nå kjører bilen vår fremover, men målet er jo at den skal unngå hindringer. Vi må dermed lese fra avstandssensoren og avgjøre om bilen skal svinge eller ikke. Til det trenger vi en hviskloss, og en sammenlikningskloss. Hvis-ellers-klossen finner vi under Styring-overskriften og sammenlikningsklossen under Operatorer-overskriften. Vi starter med å trekke ut en hvis-ellers-kloss fra styringoverskriften Trekk ut en er lik-kloss Velg mindre-enn i stedet for er lik Figur 1.7 Vi trekker ut en hvis-ellers-kloss og en sammenlikningskloss

15 Inne i sammenlikningsklossen skal vi sjekke om avstanden vi leser fra avstandssensoren er mindre enn 45 cm. Til det trenger vi å trekke ut en les Ultrasonisk avstand-kloss og en verdi-kloss. Trekk ut en Les Ultrasonisk Avstand-kloss til første hullet i sammenlikningsklossen Trekk ut en verdi-kloss og skriv tallet 45 i andre hullet i sammenlikningsklossen Figur 1.8 Vi sjekker om avstanden er mindre enn 45 cm Nå kan vi bestemme hva som skal skje når avstanden er mindre enn 45 cm. For at bilen ikke skal kollidere kan vi gjøre følgende: Fortelle motorkontrolleren at den skal kjøre bakover Vente litt så bilen får kjørt bakover Fortelle motorkontrolleren at den skal rotere til høyre Vente litt så bilen får rotert Som du ser er det vent-klossene som bestemmer hvor langt bilen skal rygge og hvor lenge bilen skal rotere. Vi plasserer disse fire klossen inne i hvis-delen av hvis-ellers-klossen.

16 Når avstanden er mindre enn 45 cm, får vi bilen til å rygge litt før vi roterer til høyre Figur 1.9 Vi rygger og roterer til høyre når avstanden fremover er mindre enn 45 cm Helt til slutt må vi fortelle bilen hva den skal gjøre inne i ellers-delen av hvis-ellersklossen. Her kan vi rett og slett flytte de to nederste klossen inn i ellers-delen.


17 Vi flytter kjør fremover og vent-klossen inn i ellersdelen av hvis-ellers-klossen Den endelige koden. Nå får vi bilen til å kjøre fremover til den møter en hindring. Da kjører bilen litt bakover og roterer litt til høyre. Her må vi velge hvor lenge vi ønsker at bilen skal kjøre bakover, og hvor lenge i ønsker at bilen skal rotere. Prøv deg frem med forskjellige verdier inne i vent-klossene for å se hvordan det påvirker bilen. Etterpå kan du forsøke å få bilen til å rotere enten til høyre eller til venstre når den møter en hindring. Hva må du gjøre for å få til det, tror du?

18 4. Programmere roboten til å følge en linje Når i skal få motoren til å følge en linje på bakken er det viktig at forskjellen mellom underlaget og linjen er stor. For eksempel fungerer sort tape godt på et lyst parkettgulen, eller en hvit tape godt på sorte fliser. Men det er viktig å huske på at sensoren måler motsatt enn i eksemplene i dette heftet dersom tapen er hvit og underlaget sort. Kodegenet har laget en video som viser hvordan linjesensoren kalibreres. Denne videoen er tilgjengelig på Kodegenets YouTube kanal. Dersom du ikke har benyttet en avstandssensor før, kan det være lurt å se gjennom videoen før du fortsetter å lese i dette dokumentet: Nå når sensoren er ferdig kalibrert for underlaget og tapen, kan vi begynne å programmere bilen. Det er lurt å starte med en enkel bane som ikke har for mange svinger i seg. Faktisk kan det lønne seg å starte med en bane som er en enkel sirkel. Pass på at banen ikke er for liten, slik at svingen i banen ikke blir for liten/krapp. Da blir det enklere å programmere bilen til å gå rundt banen i starten. Vi kan teste at bilen klarer å følge tapen ved å la den kjøre både med klokken, og mot klokken. Her tar vi utgangspunkt at vi leser HIGH (eller 1) fra sensorene dersom de er over gulvet, og at de leser 0 dersom de er over tapen. Det forutsetter at tapen er sort og at gulvet reflekterer lyset fra de infrarøde lampene tilbake til mottakeren. Vi starter med et nytt prosjekt i Blockuino, hvor vi initialiserer motorkontrollerkortet. Vi starter med følgende klosser som setter opp motorkontrolleren med riktige porter på Arduinoen Vi starter med å initialisere motorkontrolleren

19 Deretter må vi legge til en ny variabel for hver av de fire linjesensorene, samtidig som vi må definere alle pinnene som INPUT. Linjesensorene har vi koblet til pin 4, 5, 6 og 7 på Arduinoen. Vi definerer en ny variabel for hver av de fire linjesensorene Linje-pinnene definerer vi som INPUT Vi definerer variabler for linjesensorene og definerer pinnene som INPUT Nå er vi ferdig med oppsettet vi trenger for å følge en linje. Det neste vi skal gjøre er å legge til følgende inne i loop: Vi starter med å velge at bilen skal svinge mot høyre. Dette er det vi ønsker at bilen skal gjøre dersom den ikke finer noen linje under sensorene i det hele tatt Dersom linje1 er over gulvet, mens linje4 er over tapen, så skal vi svinge til høyre Dersom linje4 er over gulvet, mens linje1 er over tapen, så skal vi svinge til venstre Dersom både linje1 og linje4 er over tapen, så skal vi kjøre rett frem Dette er den enkleste måten å programmere bilen til å følge en linje på. Her benytter vi oss bare av 2 av 4 sensorer, så det er mulig å programmere roboten til å være mye mer nøyaktig når den skal følge linjen på bakken. Men koden over gir oss en god start for å eksperimentere med å få roboten til å følge en linje.

20 Vi starter med å fortelle at bilen skal svinge mot høyre. Dette overskriver vi raskt nedenfor, avhengig av hva vi leser fra linjesensorene Vi skal ta tre avgjørelser, og legger dermed ut tre tomme hvis klosser med hver sin sammenlikning Vi starter med å få bilen til å svinge til høyre, før vi legger på tre sammenlikninger Inne i hvis-klossene kan vi nå starte å legge til sammenlikningene våre. I hvis-klossene skal vi ha følgende sammenlikninger fra toppen til bunnen: Dersom linje1 og linje4 er over tapen Dersom linje1 er over tapen, men ikke linje4 Dersom linje1 ikke er over tapen, men linje4 er det Da ender vi opp med følgende kode. Til slutt venter vi 50 millisekunder mellom hver gang vi leser fra linjesensorene


21 Dersom både linje1 og linje4 er over tapen, skal vi kjøre fremover Dersom kun linje4 er over tapen, skal vi svinge til høyre Dersom kun linje1 er over tapen, skal vi svinge til venstre Vi sjekker hvilke sensorer som er over tapen Nå kan vi enkelt og greit sette inn bevegelsene inne i hver av hvis-klossene ved å sette hastigheten til motorene på venstre og høyre side av roboten. Dersom både linje1 og linje4 er over tapen, skal vi kjøre fremover Dersom kun linje4 er over tapen, skal vi svinge til høyre Dersom kun linje1 er over tapen, skal vi svinge til venstre Vi får roboten til å svinge
22 Som du ser, har vi nå fått roboten til å svinge til høyre og venstre når den skal. Dersom du lager en bane til roboten på bakken, kan vi få roboten til å følge linjen.
23 5. Styre roboten vie en radiolink Kommer snart som video Koden til roboten // // #include <PinChangeInterruptHandler.h> #include <RFReceiver.h> // Listen on digital pin 2 RFReceiver receiver(4); int ena = 11; int in1 = 12; int in2 = 13; int enb = 10; int in3 = 9; int in4 = 8; int hastighet = 0; void setup() { Serial.begin(9600); receiver.begin(); } pinmode(ena, OUTPUT); pinmode(in1, OUTPUT); pinmode(in2, OUTPUT); pinmode(enb, OUTPUT); pinmode(in3, OUTPUT); pinmode(in4, OUTPUT); void venstremotorer(int hastighet) { analogwrite(ena, abs(hastighet)); digitalwrite(in1, hastighet > 0); digitalwrite(in2, hastighet < 0); } void hoyremotorer(int hastighet) { analogwrite(enb, abs(hastighet)); digitalwrite(in3, hastighet > 0); digitalwrite(in4, hastighet < 0);
24 } int gyldighastighet(int vurderhastighet) { int hastighet = 0; if (vurderhastighet >= 7) { hastighet = 255; } else if (vurderhastighet >= 5) { hastighet = 150; } else if (vurderhastighet >= 3) { hastighet = 0; } else if (vurderhastighet >= -3) { hastighet = 0; } else if (vurderhastighet >= -5) { hastighet = -150; } else { hastighet = -250; } } return hastighet; void loop() { char msg[max_package_size]; byte senderid = 0; byte packageid = 0; byte len = receiver.recvpackage((byte *)msg, &senderid, &packageid); } int hastighetx = msg[1] - '0'; hastighetx = map(hastighetx, 0, 9, -9, 9); int hastighety = msg[3] - '0'; hastighety = map(hastighety, 0, 9, -9, 9); Serial.print(hastighetX); Serial.print(","); Serial.print(hastighetY); Serial.print(" === "); int hastighethoyre = gyldighastighet(hastighety + hastighetx); int hastighetvenstre = gyldighastighet(hastighety - hastighetx); Serial.print(hastighetHoyre); Serial.print(","); Serial.println(hastighetVenstre); venstremotorer(hastighetvenstre); hoyremotorer(hastighethoyre);
25 5.2. Koden til senderen // #include <RFTransmitter.h> int NODE_ID = 1; int OUTPUT_PIN = 4; int joystickx = 0; int joysticky = 1; // Send on digital pin 11 and identify as node 1 RFTransmitter transmitter(output_pin, NODE_ID, 100, 100, 0); void setup() { pinmode(joystickx, INPUT); pinmode(joysticky, INPUT); Serial.begin(9600); } void loop() { int xval = analogread(joystickx); int yval = analogread(joysticky); xval = map(xval, 0, 1024, 0, 9); yval = map(yval, 0, 1024, 9, 0); char radiopacket[4]; sprintf(radiopacket, "%s%d%s%d", "R", xval, "L", yval); Serial.println(radiopacket); transmitter.send((byte *)radiopacket, strlen(radiopacket) + 1); }
Arduino bilen er en selvgående liten robot. Roboten består av:
 1. Arduino Bil Arduino bilen er en selvgående liten robot. Roboten består av: En Robot base som er 3D printet 3 Litium-ion batterier En Arduino Uno Kodegenets Motorkontrollerkort Fire likestrømsmotorer
1. Arduino Bil Arduino bilen er en selvgående liten robot. Roboten består av: En Robot base som er 3D printet 3 Litium-ion batterier En Arduino Uno Kodegenets Motorkontrollerkort Fire likestrømsmotorer
En to-timers oppskrift for å bygge og programmere en Arduino-drevet strikk-
 Arduinobasert Strikk-kanon En to-timers oppskrift for å bygge og programmere en Arduino-drevet strikk- Joachim Haagen Skeie 1. Arduino Strikk kanon? Med Arduino strikk kanon kan du ved hjelp av en joystick
Arduinobasert Strikk-kanon En to-timers oppskrift for å bygge og programmere en Arduino-drevet strikk- Joachim Haagen Skeie 1. Arduino Strikk kanon? Med Arduino strikk kanon kan du ved hjelp av en joystick
Hva er maskinvaren Arduino
 1. Hva er Arduino De som har hørt om Arduino tidligere tenker på selve maskinvaren når man prater om Arduino. Men maskinvaren kretskortet med en ATMega mikrokontroller, USB port og digitale og analoge
1. Hva er Arduino De som har hørt om Arduino tidligere tenker på selve maskinvaren når man prater om Arduino. Men maskinvaren kretskortet med en ATMega mikrokontroller, USB port og digitale og analoge
2. La det bli lys Ditt første Arduino program
 2. La det bli lys Ditt første Arduino program Det første vi skal gjøre nå, er å få den Orange "L"-lampen til å blinke. På denne måten sørger vi for at vi kan snakke med Arduinoen, og at vi får lastet opp
2. La det bli lys Ditt første Arduino program Det første vi skal gjøre nå, er å få den Orange "L"-lampen til å blinke. På denne måten sørger vi for at vi kan snakke med Arduinoen, og at vi får lastet opp
ARDUINO PRODUKTKATALOG 2016
 ARDUINO PRODUKTKATALOG 2016 KODEKLUBB MAKERSPACE NETTBUTIKK Arduino Startersett Arduino er en enkel plattform for å styre og lese fra elektroniske komponenter. Arduino består av en programmerbar mikrokontroller,
ARDUINO PRODUKTKATALOG 2016 KODEKLUBB MAKERSPACE NETTBUTIKK Arduino Startersett Arduino er en enkel plattform for å styre og lese fra elektroniske komponenter. Arduino består av en programmerbar mikrokontroller,
WORKSHOP BRUK AV SENSORTEKNOLOGI
 WORKSHOP BRUK AV SENSORTEKNOLOGI MIKROKONTROLLERE - ARDUINO KURS 27.08.16 ANALOG - DIGITAL FRA VARIASJONER AV STRØMSTYRKE TIL TALL ARDUINO BRUKES TIL Å UTFØRE SLIK KONVERTERING STRØM/TALL ELLER TALL/STRØM
WORKSHOP BRUK AV SENSORTEKNOLOGI MIKROKONTROLLERE - ARDUINO KURS 27.08.16 ANALOG - DIGITAL FRA VARIASJONER AV STRØMSTYRKE TIL TALL ARDUINO BRUKES TIL Å UTFØRE SLIK KONVERTERING STRØM/TALL ELLER TALL/STRØM
Mars Robotene (5. 7. trinn)
") Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Prototyping med Arduino del 2
 Prototyping med Arduino del 2 Magnus Li magl@ifi.uio.no INF1510 30.01.2017 Arduinoundervisningen Forelesninger Mandag 30.01 & 06.02 Gjennomgang av grunnleggende temaer Teknisk verksted Mandag 30.01, 06.02,
Prototyping med Arduino del 2 Magnus Li magl@ifi.uio.no INF1510 30.01.2017 Arduinoundervisningen Forelesninger Mandag 30.01 & 06.02 Gjennomgang av grunnleggende temaer Teknisk verksted Mandag 30.01, 06.02,
Ultralydsensor. Introduksjon. Litt om ultralydsensorer. Arduino. Skrevet av: Martin Ertsås & Morten Minde Neergaard
 Arduino Ultralydsensor Skrevet av: Martin Ertsås & Morten Minde Neergaard Kurs: Arduino Tema: Tekstbasert, Elektronikk Fag: Teknologi, Programmering, Naturfag Klassetrinn: 5.-7. klasse, 8.-10. klasse,
Arduino Ultralydsensor Skrevet av: Martin Ertsås & Morten Minde Neergaard Kurs: Arduino Tema: Tekstbasert, Elektronikk Fag: Teknologi, Programmering, Naturfag Klassetrinn: 5.-7. klasse, 8.-10. klasse,
Blinkende lysdiode Introduksjon Arduino Lærerveiledning
 Blinkende lysdiode Introduksjon Arduino Lærerveiledning Introduksjon Arduino er en mikrokontroller som kan programmeres til å styre elektroniske dingser og duppeditter. Ved hjelp av en Arduino kan du skru
Blinkende lysdiode Introduksjon Arduino Lærerveiledning Introduksjon Arduino er en mikrokontroller som kan programmeres til å styre elektroniske dingser og duppeditter. Ved hjelp av en Arduino kan du skru
Steg 1: Installere programvaren
 Blinkende lysdiode Skrevet av: Adrian Helle Kurs: Arduino Tema: Elektronikk, Tekstbasert Fag: Programmering, Teknologi Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole Introduksjon Arduino
Blinkende lysdiode Skrevet av: Adrian Helle Kurs: Arduino Tema: Elektronikk, Tekstbasert Fag: Programmering, Teknologi Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole Introduksjon Arduino
Elektronikk og programmering av ubrukelige roboter
 Elektronikk og programmering av ubrukelige roboter Elektronikk du (kanskje) bruker i roboten: 1. Microbit = hjernen denne må du ha! Microbit er en såkalt mikrokontroller som vi kan programmere til å få
Elektronikk og programmering av ubrukelige roboter Elektronikk du (kanskje) bruker i roboten: 1. Microbit = hjernen denne må du ha! Microbit er en såkalt mikrokontroller som vi kan programmere til å få
1. Arduino Bluetooth 2 HC-05 modul
 1. Arduino Bluetooth 2 HC-05 modul Bluetooth er en trådløs teknologi som lar to enheter kommunisere med hverandre. Bluetooth ble opprinnelig laget for mobiletelefoner av svenske Eriksson og har vært en
1. Arduino Bluetooth 2 HC-05 modul Bluetooth er en trådløs teknologi som lar to enheter kommunisere med hverandre. Bluetooth ble opprinnelig laget for mobiletelefoner av svenske Eriksson og har vært en
Brukerveiledning til programmering av LEGO Mindstorm NXT-roboter
 Brukerveiledning til programmering av LEGO Mindstorm NXT-roboter Denne brukerveiledning forklarer steg for steg enkel programmering av NXT-roboter. Benytt gjerne veiledningen i det videre arbeidet med
Brukerveiledning til programmering av LEGO Mindstorm NXT-roboter Denne brukerveiledning forklarer steg for steg enkel programmering av NXT-roboter. Benytt gjerne veiledningen i det videre arbeidet med
super:bit-oppdraget Lærerveiledning Versjon 1, august 19.
 super:bit-oppdraget Lærerveiledning Versjon 1, august 19. Innhold 1 Oppvarming analog programmering (10 minutter)... 3 2 Kom i gang med micro:bit (15 minutter)... 5 3 Kjør en meter med BitBot... 6 4 Kjør
super:bit-oppdraget Lærerveiledning Versjon 1, august 19. Innhold 1 Oppvarming analog programmering (10 minutter)... 3 2 Kom i gang med micro:bit (15 minutter)... 5 3 Kjør en meter med BitBot... 6 4 Kjør
Bygg et Hus. Steg 1: Prøv selv først. Sjekkliste. Introduksjon. Prøv selv
 Bygg et Hus Introduksjon I denne leksjonen vil vi se litt på hvordan vi kan få en robot til å bygge et hus for oss. Underveis vil vi lære hvordan vi kan bruke løkker og funksjoner for å gjenta ting som
Bygg et Hus Introduksjon I denne leksjonen vil vi se litt på hvordan vi kan få en robot til å bygge et hus for oss. Underveis vil vi lære hvordan vi kan bruke løkker og funksjoner for å gjenta ting som
INF1510: Bruksorientert design
 INF1510: Bruksorientert design Ukeoppgaver i Arduino - uke 1 Vår 2017 Innhold 1. Elektrisitet 2 1.1. Kretsbygging 2 1.2. Komponenter 2 1.3. Dårlige kretser 3 1.4. Analoge og Digitale signaler 4 1.5. Likestrøm
INF1510: Bruksorientert design Ukeoppgaver i Arduino - uke 1 Vår 2017 Innhold 1. Elektrisitet 2 1.1. Kretsbygging 2 1.2. Komponenter 2 1.3. Dårlige kretser 3 1.4. Analoge og Digitale signaler 4 1.5. Likestrøm
Bygg et Hus. Introduksjon. Steg 1: Prøv selv først. Skrevet av: Geir Arne Hjelle
 Bygg et Hus Skrevet av: Geir Arne Hjelle Kurs: Computercraft Tema: Tekstbasert, Minecraft Fag: Programmering, Teknologi Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregåe skole Introduksjon I denne leksjonen
Bygg et Hus Skrevet av: Geir Arne Hjelle Kurs: Computercraft Tema: Tekstbasert, Minecraft Fag: Programmering, Teknologi Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregåe skole Introduksjon I denne leksjonen
7-Segment Display. Introduksjon. Steg 1: Finn frem utstyr. Til denne oppgaven trenger du. Skrevet av: Martin Ertsås & Morten Minde Neergaard
 7-Segment Display Skrevet av: Martin Ertsås & Morten Minde Neergaard Kurs: Arduino Tema: Elektronikk, Tekstbasert Fag: Programmering, Teknologi Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole
7-Segment Display Skrevet av: Martin Ertsås & Morten Minde Neergaard Kurs: Arduino Tema: Elektronikk, Tekstbasert Fag: Programmering, Teknologi Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole
7-Segment Display Nybegynner Arduino Lærerveiledning
 7-Segment Display Nybegynner Arduino Lærerveiledning Introduksjon La oss se på å få ett display til å telle. Steg 1: Finn frem utstyr Til denne oppgaven trenger du 1 Arduino Uno 1 breadboard 2 motstander
7-Segment Display Nybegynner Arduino Lærerveiledning Introduksjon La oss se på å få ett display til å telle. Steg 1: Finn frem utstyr Til denne oppgaven trenger du 1 Arduino Uno 1 breadboard 2 motstander
Vask av Srig (exit-linse + s-linse + ion optic cage)
") Vask av Srig (exit-linse + s-linse + ion optic cage) (manual s. 126) Shut down av MS 1. Sett MS i standby (Tune page) 2. Skru av electronics (Knapp på venstre side av orbitrap) 3. Skru av main power (Knapp
Vask av Srig (exit-linse + s-linse + ion optic cage) (manual s. 126) Shut down av MS 1. Sett MS i standby (Tune page) 2. Skru av electronics (Knapp på venstre side av orbitrap) 3. Skru av main power (Knapp
Prototyping med Arduino del 3
 Prototyping med Arduino del 3 Magnus Li magl@ifi.uio.no INF1510 06.02.2017 Arduinoundervisningen Forelesninger Siste i dag. Gjennomgang av grunnleggende temaer Teknisk verksted i dag, 13.02 & 20.02 Hjelp
Prototyping med Arduino del 3 Magnus Li magl@ifi.uio.no INF1510 06.02.2017 Arduinoundervisningen Forelesninger Siste i dag. Gjennomgang av grunnleggende temaer Teknisk verksted i dag, 13.02 & 20.02 Hjelp
PXT: Bjelleklang. Introduksjon. Skrevet av: Kolbjørn Engeland, Julie Revdahl
 PXT: Bjelleklang Skrevet av: Kolbjørn Engeland, Julie Revdahl Kurs: Microbit Tema: Blokkbasert, Elektronikk, Lyd, Animasjon Fag: Programmering, Musikk Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående
PXT: Bjelleklang Skrevet av: Kolbjørn Engeland, Julie Revdahl Kurs: Microbit Tema: Blokkbasert, Elektronikk, Lyd, Animasjon Fag: Programmering, Musikk Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående
3. Introduksjon til prosjektet Hringr. Scratch fra scratch Enkel programmering for nybegynnere
 3. Introduksjon til prosjektet Hringr 29 Sammenlikninger hvis og hvis-ellers Vi mennesker bruker sammenlikninger hundrevis av ganger hver eneste dag. Når vi utfører oppgaver, når vi tenker og når vi jobber.
3. Introduksjon til prosjektet Hringr 29 Sammenlikninger hvis og hvis-ellers Vi mennesker bruker sammenlikninger hundrevis av ganger hver eneste dag. Når vi utfører oppgaver, når vi tenker og når vi jobber.
INF1510 Oblig #1. Kjetil Heen, februar 2016
 INF1510 Oblig #1 Kjetil Heen, februar 2016 1 2 Etch-a-sketch Det ferdige sluttproduktet skal simulere en klassisk leke, Etch-a-sketch, et tegnebrett, hvor man tegner på en flate ved å skru på 2 hjul, og
INF1510 Oblig #1 Kjetil Heen, februar 2016 1 2 Etch-a-sketch Det ferdige sluttproduktet skal simulere en klassisk leke, Etch-a-sketch, et tegnebrett, hvor man tegner på en flate ved å skru på 2 hjul, og
MAKEADRONE MIKRO MED WIFI-KAMERA. Byggeveiledning for mikro-quadkopter.
 MAKEADRONE MIKRO yggeveiledning for mikro-quadkopter www.makeadrone.net MED WIFI-KAMERA Gratulerer med ditt nye dronekit fra Makeadrone! Lekedronen som kan repareres. Makeadrone Mikro er designet og produsert
MAKEADRONE MIKRO yggeveiledning for mikro-quadkopter www.makeadrone.net MED WIFI-KAMERA Gratulerer med ditt nye dronekit fra Makeadrone! Lekedronen som kan repareres. Makeadrone Mikro er designet og produsert
BRUKSANVISNING OG MONTERING
 GARASJEPORTÅPNER 6710310200 BRUKSANVISNING OG MONTERING BRUKSANVISNING I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde 1 Skiftenøkkel/fastnøkler
GARASJEPORTÅPNER 6710310200 BRUKSANVISNING OG MONTERING BRUKSANVISNING I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde 1 Skiftenøkkel/fastnøkler
Oppgave 1.1 Kjør rett fram Programmere roboten til å kjøre rett fram ved å bruke begge motorer. Deretter rygge tilbake.
 Lego Mindstorms EV3 Del 1 Generell programmering med blokker for å kjøre rett fram og svinge, samt bruk av løkker for å gjenta en bevegelse. Roboten skal være satt opp med standardoppsett. Oppgave 1.1
Lego Mindstorms EV3 Del 1 Generell programmering med blokker for å kjøre rett fram og svinge, samt bruk av løkker for å gjenta en bevegelse. Roboten skal være satt opp med standardoppsett. Oppgave 1.1
Mindstorm, robot- og reguleringskurs
 Mindstorm, robot- og reguleringskurs Kursets mål: Sett seg inn i reguleringsteknikk og deretter planlegge, bygge og programmere en robot for å løse et gitt problem. 1 Reguleringsteknikken Reguleringsteknikken
Mindstorm, robot- og reguleringskurs Kursets mål: Sett seg inn i reguleringsteknikk og deretter planlegge, bygge og programmere en robot for å løse et gitt problem. 1 Reguleringsteknikken Reguleringsteknikken
SUPER DISCLAIMER. Vi endrer opplegget litt fra år til år, og vi hører på dere!
 ARDUINO BASISKUNNSKAP ELEKTRISITET SIKKERHET PRAKSIS INSTALLASJON PROGRAMMERING GRUNNLEGGENDE TEORI ÅPEN SONE FOR EKSPERIMENTELL INFORMATIKK STUDIELABEN Roger Antonsen INF1510 23. januar 2012 SUPER DISCLAIMER
ARDUINO BASISKUNNSKAP ELEKTRISITET SIKKERHET PRAKSIS INSTALLASJON PROGRAMMERING GRUNNLEGGENDE TEORI ÅPEN SONE FOR EKSPERIMENTELL INFORMATIKK STUDIELABEN Roger Antonsen INF1510 23. januar 2012 SUPER DISCLAIMER
Det du skal gjøre i denne oppgava er først å sette opp bakgrunnen til spillet og så rett og slett å få firkanter til å falle over skjermen.
 Tetris Introduksjon Processing Introduksjon Lag starten på ditt eget tetris spill! Det du skal gjøre i denne oppgava er først å sette opp bakgrunnen til spillet og så rett og slett å få firkanter til å
Tetris Introduksjon Processing Introduksjon Lag starten på ditt eget tetris spill! Det du skal gjøre i denne oppgava er først å sette opp bakgrunnen til spillet og så rett og slett å få firkanter til å
Tetris. Introduksjon. Skrevet av: Kine Gjerstad Eide. Lag starten på ditt eget tetris spill!
 Tetris Skrevet av: Kine Gjerstad Eide Kurs: Processing Introduksjon Lag starten på ditt eget tetris spill! Det du skal gjøre i denne oppgava er først å sette opp bakgrunnen til spillet og så rett og slett
Tetris Skrevet av: Kine Gjerstad Eide Kurs: Processing Introduksjon Lag starten på ditt eget tetris spill! Det du skal gjøre i denne oppgava er først å sette opp bakgrunnen til spillet og så rett og slett
Python: Input og output
 Python: Input og output Skrevet av: Oversatt fra microbit-micropython.readthedocs.io (https://microbitmicropython.readthedocs.io/en/latest/tutorials/io.html) Oversatt av: Øistein Søvik Kurs: Microbit Tema:
Python: Input og output Skrevet av: Oversatt fra microbit-micropython.readthedocs.io (https://microbitmicropython.readthedocs.io/en/latest/tutorials/io.html) Oversatt av: Øistein Søvik Kurs: Microbit Tema:
4. Monter cowlingen (snuten) og fest den med skruene som ligger i samme posen som skruene til å feste motoren.
 og fest den med skruene som ligger i samme posen som skruene til å feste motoren.") 1 og 2. Bruk kun en 3 x45 mm skrue på hver side til å feste understell til hjulkåper med hjul. Vent med å skru inn de to små skruene til modellen er helt ferdig. 3. Fest motoren med feste til kroppen med
1 og 2. Bruk kun en 3 x45 mm skrue på hver side til å feste understell til hjulkåper med hjul. Vent med å skru inn de to små skruene til modellen er helt ferdig. 3. Fest motoren med feste til kroppen med
:skaper løsninger MONTERINGSVEILEDNING GARDEROBEINNREDNINGER. NØDVENDIG VERKTØY FOR MONTERING: Vinkel, vater, meter, skrutrekker, blyant og evt. bor.
 MONTERINGSVEILEDNING GARDEROBEINNREDNINGER NØDVENDIG VERKTØY FOR MONTERING: Vinkel, vater, meter, skrutrekker, blyant og evt. bor. NB! Du finner også filmer på www.langlo.no som viser montering av en del
MONTERINGSVEILEDNING GARDEROBEINNREDNINGER NØDVENDIG VERKTØY FOR MONTERING: Vinkel, vater, meter, skrutrekker, blyant og evt. bor. NB! Du finner også filmer på www.langlo.no som viser montering av en del
Kodetime for Nordstrand barneskole
 Kodetime for Nordstrand barneskole av Veronika Heimsbakk og Lars Erik Realfsen 1 Hva er Processing? Processing er et programmeringsspråk som er gratis, og tilgjengelig for alle! Man kan programmere i Processing
Kodetime for Nordstrand barneskole av Veronika Heimsbakk og Lars Erik Realfsen 1 Hva er Processing? Processing er et programmeringsspråk som er gratis, og tilgjengelig for alle! Man kan programmere i Processing
Bruk av interrupt og Timer i Arduino-program.
 1 Bruk av interrupt og Timer i Arduino-program. Når vi skal utføre handlinger som kan inntreffe tilfeldig (ikke forutsigbare hendelser), slik som å håndtere alarmer, at IO ønsker service etc kan vi benytte
1 Bruk av interrupt og Timer i Arduino-program. Når vi skal utføre handlinger som kan inntreffe tilfeldig (ikke forutsigbare hendelser), slik som å håndtere alarmer, at IO ønsker service etc kan vi benytte
Turny bladvender Brukerveiledning
 Turny bladvender Brukerveiledning Generelt om Turny elektronisk bladvender...2 Tilkobling av Turny...2 Installasjon...3 Montering av bok/tidsskrift...4 Bruk av Turny...4 Aktiviser vippefunksjonen...5 Mulige
Turny bladvender Brukerveiledning Generelt om Turny elektronisk bladvender...2 Tilkobling av Turny...2 Installasjon...3 Montering av bok/tidsskrift...4 Bruk av Turny...4 Aktiviser vippefunksjonen...5 Mulige
Om du allerede kjenner Scratch og har en Scratchbruker kan du gå videre til Steg 1.
 Pingviner på tur Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Programmering Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon Velkommen til Scratch. Vi skal
Pingviner på tur Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Programmering Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon Velkommen til Scratch. Vi skal
Uendelig bakke. Introduksjon. Skrevet av: Kine Gjerstad Eide
 Uendelig bakke Skrevet av: Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert, Animasjon Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon
Uendelig bakke Skrevet av: Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert, Animasjon Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon
Optimavent 60/30 P/F Monteringsveiledning
 Optimavent 60/30 P/F Monteringsveiledning Bestanddeler i komplett Optimavent 60/30 P/F: - Optimavent P / F-modell - ½ rør L = 1000 mm - ½ rør L = 1500 mm - Innblåsningsvifte type D - Hette Ø 1170 mm -
Optimavent 60/30 P/F Monteringsveiledning Bestanddeler i komplett Optimavent 60/30 P/F: - Optimavent P / F-modell - ½ rør L = 1000 mm - ½ rør L = 1500 mm - Innblåsningsvifte type D - Hette Ø 1170 mm -
Hvor i All Verden? Del 2. Introduksjon. Steg 0: Forrige gang. Skrevet av: Geir Arne Hjelle
 Hvor i All Verden? Del 2 Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon
Hvor i All Verden? Del 2 Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon
ToPlayer. Introduksjon: Skrevet av: Ruben Gjerstad Eide og Kine Gjerstad Eide
 ToPlayer Skrevet av: Ruben Gjerstad Eide og Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon: Nå skal vi
ToPlayer Skrevet av: Ruben Gjerstad Eide og Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon: Nå skal vi
Solid Works Innlevering Industriell IKT Henrik Thorsen
 Solid Works Innlevering Industriell IKT Av Henrik Thorsen Forord Det å lage et skateboard krever mange prosesser. Men i denne oppgaven fikk vi beskjed om å lage det uten å ta hensyn til mange faktorer
Solid Works Innlevering Industriell IKT Av Henrik Thorsen Forord Det å lage et skateboard krever mange prosesser. Men i denne oppgaven fikk vi beskjed om å lage det uten å ta hensyn til mange faktorer
Skilpaddekunst. Steg 1: Møt skilpadden. Sjekkliste. Introduksjon. Turtles
 Skilpaddekunst Introduksjon Skilpadder (turtles på engelsk) er en form for roboter som har vært i bruk innen programmering i lang tid. Vi vil bruke skilpadde-biblioteket i Python til å utforske flere programmeringskonsepter
Skilpaddekunst Introduksjon Skilpadder (turtles på engelsk) er en form for roboter som har vært i bruk innen programmering i lang tid. Vi vil bruke skilpadde-biblioteket i Python til å utforske flere programmeringskonsepter
Verden. Introduksjon. Skrevet av: Kine Gjerstad Eide og Ruben Gjerstad Eide
 Verden Skrevet av: Kine Gjerstad Eide og Ruben Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon Velkommen
Verden Skrevet av: Kine Gjerstad Eide og Ruben Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 8.-10. klasse, Videregående skole Introduksjon Velkommen
Partner Porten AS. Monteringsveiledning. Din port partner. Kvalitetsgarasjeport fra Partner Porten. Partner Porten AS, Asakvegen 338, 2040 Kløfta.
 Partner Porten AS Din port partner Kvalitetsgarasjeport fra Partner Porten Monteringsveiledning Oppstart 1: Les monteringsveiledningen nøye før oppstart. 2: Montering av en garasjeport er presisjons arbeid
Partner Porten AS Din port partner Kvalitetsgarasjeport fra Partner Porten Monteringsveiledning Oppstart 1: Les monteringsveiledningen nøye før oppstart. 2: Montering av en garasjeport er presisjons arbeid
Verden. Steg 1: Vinduet. Introduksjon
 Verden Introduksjon Processing Introduksjon Velkommen til verdensspillet! Her skal vi lage begynnelsen av et spill hvor man skal gjette hvilke verdensdeler som er hvor. Så kan du utvide oppgava til å heller
Verden Introduksjon Processing Introduksjon Velkommen til verdensspillet! Her skal vi lage begynnelsen av et spill hvor man skal gjette hvilke verdensdeler som er hvor. Så kan du utvide oppgava til å heller
ToPlayer. Steg 1: Kom i gang med metodene setup og draw. Gjør dette: Introduksjon:
 ToPlayer Introduksjon Processing Introduksjon: Nå skal vi lage et spill som to personer kan spille mot hverandre. Vi har kalt det ToPlayer, men du kan kalle det hva du vil. Målet er å dytte en figur, eller
ToPlayer Introduksjon Processing Introduksjon: Nå skal vi lage et spill som to personer kan spille mot hverandre. Vi har kalt det ToPlayer, men du kan kalle det hva du vil. Målet er å dytte en figur, eller
Monteringsanvisning. Innholdsfortegnelse. Smartpendler AS
 Smartpendler AS Monteringsanvisning Innholdsfortegnelse Hva trenger du, hva har du... 1 Klargjøring av felgen... 1 Feste pakkebærer... 3 Bremsehåndtak og gasshåndtak... 4 PAS føler... 5 Smartkontroller...
Smartpendler AS Monteringsanvisning Innholdsfortegnelse Hva trenger du, hva har du... 1 Klargjøring av felgen... 1 Feste pakkebærer... 3 Bremsehåndtak og gasshåndtak... 4 PAS føler... 5 Smartkontroller...
Kanter, kanter, mange mangekanter. Introduksjon: Steg 1: Enkle firkanter. Sjekkliste. Skrevet av: Sigmund Hansen
 Kanter, kanter, mange mangekanter Skrevet av: Sigmund Hansen Kurs: Processing Tema: Tekstbasert, Animasjon Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 8.-10. klasse, Videregående skole
Kanter, kanter, mange mangekanter Skrevet av: Sigmund Hansen Kurs: Processing Tema: Tekstbasert, Animasjon Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 8.-10. klasse, Videregående skole
Brannsender audio BRANN9
 Brannsender audio BRANN9 Varenr. 1528 HMS-nr.: 233422 Brukerhåndbok Dok. nr.: 2413A1 Dato: 2017.04.19 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 3 Utvendig 3 Under lokket 4 Batteriet 4 3. Komme i
Brannsender audio BRANN9 Varenr. 1528 HMS-nr.: 233422 Brukerhåndbok Dok. nr.: 2413A1 Dato: 2017.04.19 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 3 Utvendig 3 Under lokket 4 Batteriet 4 3. Komme i
Litt mer om Arduino. Roger Antonsen Sten Solli INF1510 31. januar 2011
 Litt mer om Arduino Roger Antonsen Sten Solli INF1510 31. januar 2011 ARDUINO Input (Data) Prosessering Output Arduino Man kan bruke de 3 elementene i varierende grad, og også kutte noen helt ut. Det finnes
Litt mer om Arduino Roger Antonsen Sten Solli INF1510 31. januar 2011 ARDUINO Input (Data) Prosessering Output Arduino Man kan bruke de 3 elementene i varierende grad, og også kutte noen helt ut. Det finnes
Hvilken BitBot går raskest gjennom labyrinten?
 Hvilken BitBot går raskest gjennom labyrinten? I fokusuka i IT skal vi jobbe praktisk, nærmere bestemt ved å bruke naturvitenskaplig metode for å løse en oppgave. Denne metoden er sentral i naturfag og
Hvilken BitBot går raskest gjennom labyrinten? I fokusuka i IT skal vi jobbe praktisk, nærmere bestemt ved å bruke naturvitenskaplig metode for å løse en oppgave. Denne metoden er sentral i naturfag og
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246
 ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
Verden - Del 2. Steg 0: Oppsummering fra introduksjonsoppgaven. Intro
 Verden - Del 2 Nybegynner Processing Intro Denne oppgaven bygger på oppgaven med samme navn som ligger på introduksjonsnivå her i Processingoppgavene. Klikk her for å gå til introduksjonsoppgaven av verden.
Verden - Del 2 Nybegynner Processing Intro Denne oppgaven bygger på oppgaven med samme navn som ligger på introduksjonsnivå her i Processingoppgavene. Klikk her for å gå til introduksjonsoppgaven av verden.
MAKEADRONE MIKRO MED WIFI-KAMERA. Byggeveiledning for mikro-quadkopter. makeadrone makeadrone
 MKEDRONE MIKRO yggeveiledning for mikro-quadkopter www.makeadrone.net henning@makeadrone.net makeadrone makeadrone DVRSEL: Dette leketøyet er beregnet på barn fra 12 år. arn mellom 8 og 12 år kan bruke
MKEDRONE MIKRO yggeveiledning for mikro-quadkopter www.makeadrone.net henning@makeadrone.net makeadrone makeadrone DVRSEL: Dette leketøyet er beregnet på barn fra 12 år. arn mellom 8 og 12 år kan bruke
Hvor i All Verden? Del 2 Erfaren Scratch PDF
 Hvor i All Verden? Del 2 Erfaren Scratch PDF Introduksjon Hvor i All Verden? er et reise- og geografispill hvor man raskest mulig skal fly innom reisemål spredt rundt i Europa. Dette er den andre leksjonen
Hvor i All Verden? Del 2 Erfaren Scratch PDF Introduksjon Hvor i All Verden? er et reise- og geografispill hvor man raskest mulig skal fly innom reisemål spredt rundt i Europa. Dette er den andre leksjonen
Steg 1: Hvordan styre figurer med piltastene
 Labyrint Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Programmering Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon I dette spillet vil vi kontrollere en
Labyrint Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Programmering Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon I dette spillet vil vi kontrollere en
Bruksanvisning for Master Swing TM - personlig driving range for alle golfentusiaster!
 Bruksanvisning for Master Swing TM - personlig driving range for alle golfentusiaster! Merknad: Denne oversettelsen inneholder ikke illustrasjoner. Se på illustrasjonene i den engelske bruksanvisningen
Bruksanvisning for Master Swing TM - personlig driving range for alle golfentusiaster! Merknad: Denne oversettelsen inneholder ikke illustrasjoner. Se på illustrasjonene i den engelske bruksanvisningen
Montering av ledd bak (Høyre og venstre side) Du har fått 4 ledstriper (D modeller) eller 6 led striper for ikke D modeller.
 Du har fått 4 ledstriper (D modeller) eller 6 led striper for ikke D modeller.") Bilde 1 Bilde 2. Montering av ledd bak (Høyre og venstre side) Du har fått 4 ledstriper (D modeller) eller 6 led striper for ikke D modeller. Bilde 1 Frunk: to lange (50-60cm kabel) er for Frunk ikke D
Bilde 1 Bilde 2. Montering av ledd bak (Høyre og venstre side) Du har fått 4 ledstriper (D modeller) eller 6 led striper for ikke D modeller. Bilde 1 Frunk: to lange (50-60cm kabel) er for Frunk ikke D
Gran-O-matic A800 GARASJEPORTÅPNER BRUKSANVISNING OG MONTERING
 Gran-O-matic A00 GARASJEPORTÅPNER BRUKSANVISNING OG MONTERING BRUKSANVISNING Gran-O-matic A00 I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde
Gran-O-matic A00 GARASJEPORTÅPNER BRUKSANVISNING OG MONTERING BRUKSANVISNING Gran-O-matic A00 I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde
Astrokatt. Introduksjon. Steg 1: En flyvende katt. Sjekkliste. Scratch. Skrevet av: Geir Arne Hjelle
 Scratch Astrokatt Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Kunst og håndverk, Naturfag Klassetrinn: 1.-4. klasse, 5.-7. klasse Språk: Norsk bokmål Introduksjon Katten vår
Scratch Astrokatt Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Kunst og håndverk, Naturfag Klassetrinn: 1.-4. klasse, 5.-7. klasse Språk: Norsk bokmål Introduksjon Katten vår
INF1510: Bruksorientert design
 INF1510: Bruksorientert design Individuell obligatorisk oppgave: Arduino 1 Publisert: 02.02.2017 Frist: 10.02.2017 kl 23:59 Arduino skal benyttes som prototypingsverktøy i INF1510, og i denne individuelle
INF1510: Bruksorientert design Individuell obligatorisk oppgave: Arduino 1 Publisert: 02.02.2017 Frist: 10.02.2017 kl 23:59 Arduino skal benyttes som prototypingsverktøy i INF1510, og i denne individuelle
Skilpaddekunst. Introduksjon. Skrevet av: Geir Arne Hjelle
 Skilpaddekunst Skrevet av: Geir Arne Hjelle Kurs: Python Tema: Tekstbasert Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon Skilpadder (turtles på
Skilpaddekunst Skrevet av: Geir Arne Hjelle Kurs: Python Tema: Tekstbasert Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon Skilpadder (turtles på
PXT: Spå fremtiden med bilder
 PXT: Spå fremtiden med bilder Skrevet av: Helene Isnes Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Kunst og håndverk, Matematikk, Programmering Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående
PXT: Spå fremtiden med bilder Skrevet av: Helene Isnes Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Kunst og håndverk, Matematikk, Programmering Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående
Skaper løsninger MONTERINGSVEILEDNING GARDEROBEINNREDNINGER
 Skaper løsninger MONTERINGSVEILEDNING GRDEROBEINNREDNINGER 14655-2 - 4000 NØDVENDIG VERKTØY FOR MONTERING: Vinkel, vater, meter, skrutrekker, blyant og evt. bor. NB! Du finner også filmer på www.langlo.no
Skaper løsninger MONTERINGSVEILEDNING GRDEROBEINNREDNINGER 14655-2 - 4000 NØDVENDIG VERKTØY FOR MONTERING: Vinkel, vater, meter, skrutrekker, blyant og evt. bor. NB! Du finner også filmer på www.langlo.no
IN1060: Bruksorientert design
 IN1060: Bruksorientert design Ukeoppgaver i Arduino - uke 2 Vår 2018 Innhold 1. Analoge signaler 2 1.1. Lese og skrive analoge signaler 2 1.2. Potensiometer og serial monitor 2 1.3. Pulserende lys 3 1.4.
IN1060: Bruksorientert design Ukeoppgaver i Arduino - uke 2 Vår 2018 Innhold 1. Analoge signaler 2 1.1. Lese og skrive analoge signaler 2 1.2. Potensiometer og serial monitor 2 1.3. Pulserende lys 3 1.4.
Varslingshjelpemidler. P162A Bevegelsesdetektor, kablet P162B Bevegelsesdetektor, radio. Bruks- og Monteringsanvisning
 Varslingshjelpemidler P162A Bevegelsesdetektor, kablet P162B Bevegelsesdetektor, radio Bruks- og Monteringsanvisning Gjerstadveien 398, Brokelandsheia, 4993 Sundebru, Tlf + 47 37119950 E-mail: post@picomed.no
Varslingshjelpemidler P162A Bevegelsesdetektor, kablet P162B Bevegelsesdetektor, radio Bruks- og Monteringsanvisning Gjerstadveien 398, Brokelandsheia, 4993 Sundebru, Tlf + 47 37119950 E-mail: post@picomed.no
1. Arduino Bluetooth 4.0 Low Energy (BLE)
") Dokumentet er et foreløpig utkast 1. Arduino Bluetooth 4.0 Low Energy (BLE) Bluetooth er en trådløs teknologi som lar to enheter kommunisere med hverandre. I motsetning til WLAN (trådløst nettverk), støtter
Dokumentet er et foreløpig utkast 1. Arduino Bluetooth 4.0 Low Energy (BLE) Bluetooth er en trådløs teknologi som lar to enheter kommunisere med hverandre. I motsetning til WLAN (trådløst nettverk), støtter
Bygge en pyramide. Introduksjon. Steg 1: Lage en ny mod. Sjekkliste. Skrevet av: Pål G. Solheim
 Bygge en pyramide Skrevet av: Pål G. Solheim Kurs: Learntomod Tema: Blokkbasert, Minecraft Fag: Programmering, Teknologi Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon La oss gjøre
Bygge en pyramide Skrevet av: Pål G. Solheim Kurs: Learntomod Tema: Blokkbasert, Minecraft Fag: Programmering, Teknologi Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon La oss gjøre
Deleliste Turtle quadkopterbyggesett
 Deleliste Turtle quadkopterbyggesett - 1 stk 5-kanals radiosender med mottaker - 1 stk KK2 styrekort med piezo-høyttaler - 4 stk servokabler - 2 par motorer DYS 1806-1 stk LiPo-batteri 3 cell 2200 mah
Deleliste Turtle quadkopterbyggesett - 1 stk 5-kanals radiosender med mottaker - 1 stk KK2 styrekort med piezo-høyttaler - 4 stk servokabler - 2 par motorer DYS 1806-1 stk LiPo-batteri 3 cell 2200 mah
Steg 1: Lag bakken og få den til følge med
 3D-flakser, del 2 Skrevet av: Gudbrand Tandberg og Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill, Animasjon Fag: Matematikk, Naturfag, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse
3D-flakser, del 2 Skrevet av: Gudbrand Tandberg og Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill, Animasjon Fag: Matematikk, Naturfag, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse
Installasjon IDT 120. Art. nr: 320 454
 Installasjon IDT 120 Art. nr: 320 454 1. Installasjon 1.1 Soner IDT 128 installeres på steder der personer må passere når de forlater et rom eller en sone. IDT 128 sender ut et magnetfelt i en viss størrelse
Installasjon IDT 120 Art. nr: 320 454 1. Installasjon 1.1 Soner IDT 128 installeres på steder der personer må passere når de forlater et rom eller en sone. IDT 128 sender ut et magnetfelt i en viss størrelse
Høgskoleni østfold EKSAMEN. Oppgavesettet består av 8 sider inklusiv denne forsiden og vedlegg.
 Høgskoleni østfold EKSAMEN Emnekode:Emne: ITD13012Datateknikk Dato:Eksamenstid: 13. mai 2015kl. 09.00 til k1.12.00, 3 timer Hjelpemidler: to A4-ark (fire sider) med egne notater Ikke-kommuniserende kalkulator
Høgskoleni østfold EKSAMEN Emnekode:Emne: ITD13012Datateknikk Dato:Eksamenstid: 13. mai 2015kl. 09.00 til k1.12.00, 3 timer Hjelpemidler: to A4-ark (fire sider) med egne notater Ikke-kommuniserende kalkulator
Monteringsanvisning. Innholdsfortegnelse. Smartpendler AS
 Smartpendler AS Monteringsanvisning Innholdsfortegnelse Hva trenger du, hva har du... 1 Klargjøring av felgen... 1 Feste batteri... 3 Bremsehåndtak og gasshåndtak... 5 PAS føler... 6 Hva trenger du, hva
Smartpendler AS Monteringsanvisning Innholdsfortegnelse Hva trenger du, hva har du... 1 Klargjøring av felgen... 1 Feste batteri... 3 Bremsehåndtak og gasshåndtak... 5 PAS føler... 6 Hva trenger du, hva
Avtrekkssystem type CD 400
 Avtrekkssystem type CD 400 Monteringsveiledning Bestanddeler i komplett CD 400 avtrekkssystem: Viftepanel (innsugskon) Spjeldring/opphengsbånd ½ rør L = 1000 mm/1500 mm Skjøtebånd rør-rør Strammebånd Avtrekksvifte
Avtrekkssystem type CD 400 Monteringsveiledning Bestanddeler i komplett CD 400 avtrekkssystem: Viftepanel (innsugskon) Spjeldring/opphengsbånd ½ rør L = 1000 mm/1500 mm Skjøtebånd rør-rør Strammebånd Avtrekksvifte
Steg 1: Lag bildedeklarasjon
 Bildepresentasjon Skrevet av: Ruben Gjerstad Eide og Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert, Animasjon Fag: Programmering, Kunst og håndverk Klassetrinn: 8.-10. klasse, Videregående skole
Bildepresentasjon Skrevet av: Ruben Gjerstad Eide og Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert, Animasjon Fag: Programmering, Kunst og håndverk Klassetrinn: 8.-10. klasse, Videregående skole
Bygge en kube. Introduksjon. Steg 1: Lage en ny mod. Skrevet av: Pål G. Solheim
 Bygge en kube Skrevet av: Pål G. Solheim Kurs: Learntomod Tema: Blokkbasert, Minecraft Fag: Programmering, Teknologi Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon Vi skal bygge en
Bygge en kube Skrevet av: Pål G. Solheim Kurs: Learntomod Tema: Blokkbasert, Minecraft Fag: Programmering, Teknologi Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon Vi skal bygge en
PXT: Det regner mat! Introduksjon. Steg 1: Grunnlag. Sjekkliste. Skrevet av: Helene Isnes
 PXT: Det regner mat! Skrevet av: Helene Isnes Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Matematikk, Programmering Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole Introduksjon
PXT: Det regner mat! Skrevet av: Helene Isnes Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Matematikk, Programmering Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole Introduksjon
Mattespill Nybegynner Python PDF
 Mattespill Nybegynner Python PDF Introduksjon I denne leksjonen vil vi se litt nærmere på hvordan Python jobber med tall, og vi vil lage et enkelt mattespill. Vi vil også se hvordan vi kan gjøre ting tilfeldige.
Mattespill Nybegynner Python PDF Introduksjon I denne leksjonen vil vi se litt nærmere på hvordan Python jobber med tall, og vi vil lage et enkelt mattespill. Vi vil også se hvordan vi kan gjøre ting tilfeldige.
Sprettende ball Introduksjon Processing PDF
 Sprettende ball Introduksjon Processing PDF Introduksjon: I denne modulen skal vi lære et programmeringsspråk som heter Processing. Det ble laget for å gjøre programmering lett for designere og andre som
Sprettende ball Introduksjon Processing PDF Introduksjon: I denne modulen skal vi lære et programmeringsspråk som heter Processing. Det ble laget for å gjøre programmering lett for designere og andre som
Kremautomat 9 hyller (10)
") Norsk Solariumservice, Postboks 223, 5342 STRAUME Gratis grønt nummer 800 34 033 Antall sider: 1 av 5 Kremautomat 9 hyller (10) Side 1 Kunde bruk. Side 1 til 2 Montering, kobling, merker og påfylling Side
Norsk Solariumservice, Postboks 223, 5342 STRAUME Gratis grønt nummer 800 34 033 Antall sider: 1 av 5 Kremautomat 9 hyller (10) Side 1 Kunde bruk. Side 1 til 2 Montering, kobling, merker og påfylling Side
Donkey Kong. Introduksjon. Oversikt over prosjektet. Skrevet av: Geir Arne Hjelle
 Donkey Kong Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill, Animasjon Fag: Naturfag, Programmering, Engelsk, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon
Donkey Kong Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill, Animasjon Fag: Naturfag, Programmering, Engelsk, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon
Verden - Del 2. Intro. Skrevet av: Kine Gjerstad Eide
 Verden - Del 2 Skrevet av: Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 8.-10. klasse, Videregående skole Intro Denne oppgaven bygger på
Verden - Del 2 Skrevet av: Kine Gjerstad Eide Kurs: Processing Tema: Tekstbasert Fag: Matematikk, Programmering, Samfunnsfag Klassetrinn: 8.-10. klasse, Videregående skole Intro Denne oppgaven bygger på
Soloball. Introduksjon. Steg 1: En roterende katt. Sjekkliste. Skrevet av: Geir Arne Hjelle
 Soloball Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Matematikk, Programmering Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon Vi skal nå lære hvordan vi
Soloball Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Matematikk, Programmering Klassetrinn: 1.-4. klasse, 5.-7. klasse, 8.-10. klasse Introduksjon Vi skal nå lære hvordan vi
Universalsender UNI10-L
 Varenr. 1634 Universalsender UNI10-L Brukerhåndbok Dok. nr.: 5959A Dato: 2019.03.11 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 3 Utvendig 3 Under lokket 4 Batteriet 4 3. Komme i gang 4 Sette inn batteriet
Varenr. 1634 Universalsender UNI10-L Brukerhåndbok Dok. nr.: 5959A Dato: 2019.03.11 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 3 Utvendig 3 Under lokket 4 Batteriet 4 3. Komme i gang 4 Sette inn batteriet
Avtrekkssystem type CD 500
 Avtrekkssystem type CD 500 Monteringsveiledning Bestanddeler i komplett CD 500 avtrekkssystem: Viftepanel (innsugskon) Spjeldring/opphengsbånd ½ rør L = 1000 mm/1500 mm Skjøtebånd rør-rør Strammebånd Avtrekksvifte
Avtrekkssystem type CD 500 Monteringsveiledning Bestanddeler i komplett CD 500 avtrekkssystem: Viftepanel (innsugskon) Spjeldring/opphengsbånd ½ rør L = 1000 mm/1500 mm Skjøtebånd rør-rør Strammebånd Avtrekksvifte
PXT: Himmelfall. Introduksjon. Skrevet av: Helene Isnes og Julie Revdahl
 PXT: Himmelfall Skrevet av: Helene Isnes og Julie Revdahl Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Programmering, Matematikk Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole
PXT: Himmelfall Skrevet av: Helene Isnes og Julie Revdahl Kurs: Microbit Tema: Elektronikk, Blokkbasert, Spill Fag: Programmering, Matematikk Klassetrinn: 5.-7. klasse, 8.-10. klasse, Videregående skole
INF1510: Bruksorientert design
 INF1510: Bruksorientert design Ukeoppgaver i Arduino - uke 2 Vår 2017 Innhold 1. Analoge signaler 1 1.1. Lese og skrive analoge signaler 1 1.2. Potensiometer og serial monitor 1 1.3. Pulserende lys 2 1.4.
INF1510: Bruksorientert design Ukeoppgaver i Arduino - uke 2 Vår 2017 Innhold 1. Analoge signaler 1 1.1. Lese og skrive analoge signaler 1 1.2. Potensiometer og serial monitor 1 1.3. Pulserende lys 2 1.4.
Bruksanvisning Chronopass STK PO/PL (tidsinnstiller/sender) og Interface STM PO/PL (Mottaker)
 og Interface STM PO/PL (Mottaker)") Bruksanvisning Chronopass STK PO/PL (tidsinnstiller/sender) og Interface STM PO/PL (Mottaker) WWW.WILFA.COM Bruksanvisning for installering og bruk; beholdes av brukeren Apparatet du nettopp har kjøpt
Bruksanvisning Chronopass STK PO/PL (tidsinnstiller/sender) og Interface STM PO/PL (Mottaker) WWW.WILFA.COM Bruksanvisning for installering og bruk; beholdes av brukeren Apparatet du nettopp har kjøpt
Team Xecuter Joycon Mod
 Team Xecuter Joycon Mod Laget: XxWiReDxX Fungerer på alle Switch Consoles SX OS fungerer på alle Nintendo Switchek og alle systemversjoner! spille alt Spill SX OS lar deg spille alle dine favorittspill
Team Xecuter Joycon Mod Laget: XxWiReDxX Fungerer på alle Switch Consoles SX OS fungerer på alle Nintendo Switchek og alle systemversjoner! spille alt Spill SX OS lar deg spille alle dine favorittspill
Snøballkrig. Introduksjon. Steg 1: En snøballkaster. Skrevet av: Geir Arne Hjelle
 Snøballkrig Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill, Animasjon Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon I denne
Snøballkrig Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill, Animasjon Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon I denne
For å sjekke at Python virker som det skal begynner vi med å lage et kjempeenkelt program. Vi vil bare skrive en enkel hilsen på skjermen.
 Kuprat Skrevet av: Geir Arne Hjelle Kurs: Python Tema: Tekstbasert Fag: Norsk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon I dette kurset skal vi introdusere programmeringsspråket Python. Dette
Kuprat Skrevet av: Geir Arne Hjelle Kurs: Python Tema: Tekstbasert Fag: Norsk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon I dette kurset skal vi introdusere programmeringsspråket Python. Dette
Hoppehelt. Introduksjon. Steg 1: Streken. Sjekkliste. Skrevet av: Geir Arne Hjelle
 Hoppehelt Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon Hoppehelt er litt inspirert
Hoppehelt Skrevet av: Geir Arne Hjelle Kurs: Scratch Tema: Blokkbasert, Spill Fag: Matematikk, Programmering, Kunst og håndverk Klassetrinn: 5.-7. klasse, 8.-10. klasse Introduksjon Hoppehelt er litt inspirert
Falck 6709 Armbåndssender
 Brukerveiledning Falck 6709 Armbåndssender Varenr: 320 066 Innholdsfortegnelse Innholdsfortegnelse... 2 Beskrivelse av Falck 6709 Klokke sender... 2 Levering... 3 Koding til varsler... 3 Slette koder:...
Brukerveiledning Falck 6709 Armbåndssender Varenr: 320 066 Innholdsfortegnelse Innholdsfortegnelse... 2 Beskrivelse av Falck 6709 Klokke sender... 2 Levering... 3 Koding til varsler... 3 Slette koder:...
Dørklokkesender, audio DØR9-L
 Dørklokkesender, audio DØR9-L Varenr. 1636 Brukerhåndbok Dok. nr.: 5971 A Dato: 2019.03.08 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 3 Utvendig 3 Under lokket 3 Batteriet 4 3. Komme i gang 4 Sette
Dørklokkesender, audio DØR9-L Varenr. 1636 Brukerhåndbok Dok. nr.: 5971 A Dato: 2019.03.08 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 3 Utvendig 3 Under lokket 3 Batteriet 4 3. Komme i gang 4 Sette
Kompakt ZIP Screen med Serge 2165 diagonalvevd glassfiberduk og Somfy motor/automatikk.
 SolidScreen 125 Kompakt ZIP Screen med Serge 2165 diagonalvevd glassfiberduk og Somfy motor/automatikk. SolidScreen 125 kan styres med fjernkontroll RTS (enveis kommunikasjon) eller IO (toveis). Begge
SolidScreen 125 Kompakt ZIP Screen med Serge 2165 diagonalvevd glassfiberduk og Somfy motor/automatikk. SolidScreen 125 kan styres med fjernkontroll RTS (enveis kommunikasjon) eller IO (toveis). Begge
Montasjeveiledning Vola HV1-electronic
 Montasjeveiledning Vola HV1-electronic 1 TEKNISKE SPESIFIKASJONER L=12mm Trykkområde: 0,5-8 bar Maks. vanntemperatur: 70 C Flow: Strømforsyning: Etterløpstid: Innstilling av etterløpstid: Lav batterifunksjon:
Montasjeveiledning Vola HV1-electronic 1 TEKNISKE SPESIFIKASJONER L=12mm Trykkområde: 0,5-8 bar Maks. vanntemperatur: 70 C Flow: Strømforsyning: Etterløpstid: Innstilling av etterløpstid: Lav batterifunksjon:
Trådløs forseringsbryter - Spirit
 110984N-05 2016-02 Trådløs forseringsbryter - Spirit Monteringsveiledning ART.NR.: 113243 Trådløs forseringsbryter Innhold 1 Funksjon 2 2 Installasjon 3 2.1 Valg av installasjonssted 3 2.2 Installasjon
110984N-05 2016-02 Trådløs forseringsbryter - Spirit Monteringsveiledning ART.NR.: 113243 Trådløs forseringsbryter Innhold 1 Funksjon 2 2 Installasjon 3 2.1 Valg av installasjonssted 3 2.2 Installasjon