KNM TSUNAMI. Sjøgående droneplattform. Designet av
|
|
|
- Maren Bø
- 5 år siden
- Visninger:
Transkript

1 KNM TSUNAMI Sjøgående droneplattform Designet av
2 Innholdsfortegnelse Innholdsfortegnelse 2 1. Sammendrag 6 2. Kravdokument Kravdokument (KD) Stabsskrav til dokumentet Krav og forutsetninger til systemet: Krav til modell og andre forutsetninger: 8 3. Planlegging Konseptfasen Behovsanalyse Mål og strategi Overordnede krav Alternativ analyse Definisjonsfasen Anskaffelsesfasen Organisasjon Tidsplanlegging Work Breakdown Structure Helse, miljø og Sikkerhet (HMS) Krav Tiltak Lodding Pussing av skrog Kapping med stikksag Lage kretskort Dokumentasjon Konstruksjon Skrog Hangar Utfordringer underveis Forskjell på modellen og en fullskala Avvik fra modellen og tegningen 25 side 2
3 4.1.6 Kjemikalier Lim Sparkel Maling Innkjøp Drift og vedlikehold av modellen Før drift Under drift Etter drift Tyngdepunktsberegninger Fremdriftssystemer, styring og mekanikk Motor Servo Modifikasjon av servo Batteripakke Resultater Elektronikk og styresystemer Oversikt over kanaler RC kontrollen Tilkobling Brytere Koblingsskjema RC kontroll National Instruments USB-6008, mikrokontroller Koblingsskjema system Design av D/A-omformer Styresystemer i Labview Frontpanel Blokkdiagram Dynamisk posisjonering Bruksområder Parametere Dynamisk PosisjonsSystem Posisjonsdata 51 side 3
4 Lukekontroll Manuell styring Kalibrering av DPS Wifi Kanalfordeling Erfaringer Testresultater Slepetest Sammendrag av slepetest Resultater Rekkevidde og drivstoff forbruk Krengetest Sammendrag av krengetest Teori Fremgangsmåte Resultater Graf Eventuelle feilkilder Test av fart og akselerasjon Sammendrag av forsøk Gjennomføring akselerasjonstest Gjennomføring fartstest Hydrostatikk Hensikt Gloseliste Kraftmåling Hensikt Sammendrag Gjennomføring kraftmåling Resultat Strømtrekk og spenning over motor under kjøring Sammendrag Gjennomføring strømforbrukstest 77 side 4
5 5.6.3 Gjennomføring test av spenning over motor Halvt pådrag Fullt pådrag Motorens virkningsgrad, dreiemoment, og strømforbruk, ved ulike turtall Hensikt Sammendrag Gjennomføring Test av Virkningsgrad og Dreiemoment Gjennomføring strømforbruk ved ulike turtall Resultater Konstruksjonsvannlinjen og trim Hensikt Sammendrag Bilde fra Freeship Gjennomføring Bilder av første vannlinje test Serieproduksjon Muligheter Utfordringer Fordeler Kostnader 85 7 Kilder Nettsider 87 8 Programvare 87 side 5
6 1. Sammendrag Sjøforsvaret har besluttet å anskaffe seg autonome angrepssystemer bestående av en liten sjøgående plattform og et antall angrepsdroner, som er tenkt å operere i Tromsø/Ramsund området og skal avdekke et havområde nord til Spitsbergen og vest/østover. Det ble besluttet å danne fem prosjektgrupper fra henholdsvis ED-0, Maskin-0 og EA-0 på Sjøkrigsskolen. Gruppene skulle selv planlegge, teste og konstruere fartøyet. Vi fikk utlevert et kravdokument (KD) som inneholdt krav og spesifikasjoner til fartøyet. Innledningsvis i prosjektarbeidet fordelte vi arbeidsoppgaver, samt satte oss overordnede mål for hvordan vi ville gjennomføre oppgaven. Gruppen skulle lage en prototype i en modellskala for kartlegging og demonstrasjon av egenskaper. Plattformen skulle fremstilles i skala 1:24. På kickoff-møtet, 23 mai 2017, presenterte vi arbeidsfordelingen innad i gruppen, samt en grov skissert fremdriftsplan med ulike milepæler for datoer de forskjellige oppgavene skulle være ferdig. De første ukene av prosjektet gikk med til undervisning. Vi lærte om stabilitet og digitale kretser, i tillegg til at vi hadde labforsøk i det vi fikk opplæring i. Vi benyttet programmene Labview, Freeship og Gx works 2. Vi ble enige om å bruke facebook som kommunikasjonsverktøy, samt Google Docs, hvor vi lastet opp filene, slik at alle fikk tilgang til disse. I sluttfasen då vi skulle skrive rapporten og samle alle dokumentene vi hadde, viste dette seg å være en veldig smart løsning. Google docs gjør at samtlige kan skrive i samme dokument samtidig. Modellen er konstruert slik at fart, stabilitet og hangar-løsning for utskytning av droner passer godt til arbeidskravene. Konstruksjon av skrog og utvikling av styresystemer, elektronikk og dynamisk posisjonering foregikk parallelt. I denne fasen var prosjektgruppen splittet og vi var derfor avhengig av møter hvor vi gikk gjennom fremgangen til hver enkelt. I tillegg til å få et bedre innblikk i hverandres problemstillinger og løsninger. Da modellen var ferdig konstruert, startet vi med testing. Dette foregikk hovedsakelig i slepetanken. Prosjektarbeidet ble avsluttet med en konkurranse og gruppepresentasjoner for prosjekteier. side 6
7 2. Kravdokument Alle gruppene fikk utlevert et kravdokument som inneholdt spesifikasjoner og krav som fartøyet måtte overholde. 2.1 Kravdokument (KD) Stabsskrav til dokumentet Krav og forutsetninger til systemet: 1. Det skal tilstrebes en lav-kost løsning. 2. Lav signatur (IR, RCS, lyd og visuell) skal tilstrebes. 3. Framdrift skal bestå av en enkel framdriftslinje motor/aksel/propell/ror. 4. Lengde overalt skal ikke overstige 24 m. 5. Største bredde overalt skal ikke overstige 5m. 6. Dronene skal kunne sendes ut i rask rekkefølge eller samlet. 7. Plattformen skal kunne frakte minst 10 stk. droner. 8. Plattformen bør minimum kunne tilbakelegge 1000 nm ila. 72 timer. 9. Driftsprofil for plattformen, i venteområdet, er 5 kts fart/døgn. 10. Skal kunne drive operasjoner i 30 dager i området. 11. Fartøyet skal være stabilt med tomme tanker og med droner ombord. 12. Dronene skal ha sjøsikker lagring når ombord. 13. Fartøyet skal operere autonomt og/eller via avstandskommunikasjon. Prototype i modellskala lages for kartlegging og demonstrasjon av egenskaper. side 7
8 2.1.2 Krav til modell og andre forutsetninger: - Plattform fremstilles i skala 1:24. - Dronene skal kunne settes ut og tas inn. - Skal frakte den angitte last på sikker måte, se tabell nedenunder. - Framdrift og manøvrering skal være basert på utlevert elektrisk motor, aksling, propell, ror, servoer, batteri, motorkontroller og fjernstyring. - Elektriske komponenter skal plasseres og/eller beskyttes slik at de ikke blir ødelagt av vannsprut. - Skroget skal designes ved hjelp av dataprogrammet Freeship, versjon Hovedskroget skal lagres i polyfoam. - Konstruksjonsvannlinjen (KVL), nullkryss og dypgangsmerker forut og akter skal tegnes på modellen. - Skal utstyres med fjernstyrt innretning for flytting/oppbevaring av dronene. - Skal ha taue/feste anretning i akter og i forskipet. Kraften skal gå i senterlinjen til fartøyet. - Skal kunne montere en horisontal montert list, på tvers av skipets lengde. Skal nyttes til slepeforsøk. Den skal monteres rett over fartøyets oppdriftssenter (LCB) ved KVL og må kunne tåle en kraft på 10 kg i horisontal retning. Andre utrustningsdetaljer og annet i henhold til prosjektgruppens behov. side 8
9 3. Planlegging Planleggingsfasen består av en konseptfase, behovsanalyse og målsetninger. 3.1 Konseptfasen Hensikten med konseptfasen er til for å avdekke samt vurdere de konseptuelle valgene knyttet til et konkret behov Forsvaret har. Men hva er egentlig et konsept? Et konsept er en måte å gå frem på for å løse et problem eller skape en endring. Konseptfasen skal sikre at lederen får god, relevant og tilstrekkelig informasjon for å trekke en konklusjon om hvorvidt man skal iverksette bygging Behovsanalyse En behovsanalyse skal utarbeides med utgangspunkt i en konkret prosjektidé. Denne analysen inneholder kartlegging og gruppering av interessesenter, samt en sammenfatning av det totale behovet. Behovsanalysen er muligens den viktigste fasen i salgsarbeid. Det som menes med behovsanalyse er at det er en dialog mellom kunden og selgeren, hvor selgeren gjennom målrettet bruk av ulike spørreteknikker prøver å kartlegge hvilke behov og problemer kunden har. Formålet med denne analysen er å bli kjent med kunden og deres markeds - og konkurransesituasjon. Det viktigste behovet som må avdekkes er sikker transport og behandlingsmåte av kampdronene Mål og strategi Hva er egentlig et mål? Det er en beskrivelse av en ønsket fremtidig tilstand. En strategi derimot er en beskrivelse av hvordan en tenker seg å nå målene. Det finnes i grunn to ulike hovedstrategier. 1. Generiske strategier. Dette er knyttet til hvordan en organisasjon posisjonerer seg i forhold til sine omgivelser. 2. Ressursbaserte strategier. Denne typen retter fokuset inn mot de interne forholdene i organisasjonen. Målet er å kunne hurtig angripe allerede etablerte, fiendtlige strukturer i havområder uten mannskaper. Strategien vil være å konstruere et skip med lav signatur, i den hensikt at fartøyet skal være vanskelig å oppdage for fienden Overordnede krav Au tonom ka mpdrone s upport, AUKADS, skal kunne operere i vindstyrke opptil stiv kuling, samt med bølgehøyde opp til 5 meter. I tillegg skal den kunne transportere og aktivere kampdronene opptil størrelsen til en standard kampdrone forsvaret besitter. Rekkevidden til kampdronen er på inntil 20 nanometer (nm) fra moderflyet. side 9

 best mulig forutsetninger for å fatte en beslutning om iverksetting. I definisjonsfasen skal det utarbeides et detaljert kravdokument.")
10 3.1.4 Alternativ analyse Det er vurdert 3 alternative størrelseskrav til kampdronene som skal transporteres. Det er henholdsvis 5, 10,15 eller 20 kampdroner pr. fartøy. Det er i tillegg vurdert mindre krav til vind og bølgehøyde. 3.2 Definisjonsfasen Hensikten med definisjonsfasen er å utarbeide styrings- og beslutningsunderlag for godkjenning og videreføring av prosjektet. Det har og til hensikt å gi Forsvarsdepartementet (FD) best mulig forutsetninger for å fatte en beslutning om iverksetting. I definisjonsfasen skal det utarbeides et detaljert kravdokument. (Henviser til punkt 2. kravdokument i innholdsfortegnelsen.) 3.3 Anskaffelsesfasen Anskaffelsesfasen markerer at prosjektet går fra planleggingsfasen til gjennomføringsfasen. Målet i anskaffelsesfasen er å vinne konkurransen mellom prosjektgruppene om beste prosjekt og presentasjon av prosjektet, i håp om at forsvaret bestiller fartøy fra oss. 3.5 Organisasjon Da vi skulle organisere gruppen satte vi oss ned sammen og bestemte tidlig hvem som skulle være prosjektleder. Vebjørn kom med et forslag om at hver enkelt kunne skrive hvilken rolle vedkommende ønsket å bekle. Det ble raskt avgjort hvilke roller hver enkelt skulle inneha. En naturlig del i prosessen av fordelingen av oppgavene, var at maskin gjengen tok ansvar for design og konstruksjon av skrog, og elektronikk gjengen tok ansvar for det elektriske ombord i båten Organisasjonskart side 10


11 3.5.3 Tidsplanlegging Som planleggingsverktøy har vi valgt å ta i bruk Gantt-diagram. Dette for å gi et estimat på ulike tidsfrister for de spesifikke arbeidsoppgavene. side 11

12 3.5.4 Work Breakdown Structure Work breakdown Structure (WBS), som på norsk er oversatt til prosjektnedbrytningsstruktur (PNS), er en metode for å gi en oversiktlig beskrivelse av hva som skal gjøres og omfanget av de enkelte arbeidsoppgavene. Det er mange fordeler med hvorfor dette er et godt redskap, blant annet danner det et godt utgangspunkt for planlegging. I tillegg danner det grunnlaget for å estimere prosjekter på en nøyaktig måte. Dette hierarkiske systemet er delt opp i ulike nivåer. Disse nivåene reguleres etter hvor stort og omfattende prosjektet er. Over viser hvordan våres WBS ser ut. 1. Nivå beskriver prosjektet. På dette nivået skrives gjerne prosjektnavnet opp. I denne boksen tenker man på hva slags leveranse som skal leveres. I vårt tilfelle er det prosjekteier som har gitt ut informasjon om hva som er hensikten med prosjektet og hvilke krav som er satt. 2. Nivå beskriver arbeidspakker prosjektet skal bestå av. WBS en over viser 3 ulike arbeidspakker. Dette er henholdsvis prosjektledelse, konstruksjon og dokumentasjon. Dette nivået kalles arbeidspakke nivå. Disse boksene består av arbeidsoppgaver som må gjøres. Arbeidsoppgavene som utføres her, kalles aktiviteter. 3. Nivå beskriver arbeidsoppgavene som må gjøres i de forskjellige arbeidspakkene. Ansvaret for disse aktivitetene skal legges over på en person. I vår gruppes tilfelle er Vebjørn prosjektleder, Halvard er teknisk prosjektleder, og har hovedansvaret for konstruksjonen, og Kristian er dokumentansvarlig. Samtidig er det viktig at samtlige i gruppen har en felles forståelse av hvilke beslutninger som tas og hvordan vi ligger ann i prosjektarbeidet. På dette nivået beskrives også hva som skal gjøres. 4. Nivået beskriver hvilke arbeidsoppgaver som må gjøres. side 12
13 3.5.6 Helse, miljø og Sikkerhet (HMS) Gruppen vår ser på HMS som en meget viktig del i en organisasjon. For at prosjektet skal kunne gjennomføres på best mulig måte, er det viktig at rammene rundt (både kvalitetsmessig og sikkerhetsmessig) blir overholdt på en profesjonell måte. Dette er et felles ansvar som faller på samtlige i prosjektet, deriblant prosjektledelsen. Målet er å ha et fullt forsvarlig arbeidsmiljø som skaper gode rammevilkår og resultater til enhver tid Krav Alle disse kravene er samtlige i prosjektet ansvarlig for, og prosjektledelsen(hms-ansvarlig) har hovedansvaret for at disse kravene blir etterfulgt. Gyldig dokumentasjon: Alt personell som er involvert i prosjektet, skal fremvise gyldige arbeidspapirer, kurs og andre dokument som har med kvalifikasjoner å gjøre. Dette er arbeidstaker selv ansvarlig for å fremlegge, mens arbeidsgiver har ansvaret for at dette blir kontrollert og fulgt opp. Verneutstyr: Samtlige arbeidsoppgaver skal bli gjennomført på en så sikker og kontrollert måte som mulig. Derfor er verneutstyr påbudt under alt arbeid som omhandler kjemikalier, giftstoffer, spenningsfare, stråling, og alle andre tilfeller hvor fare for egen/andres helse kan oppstå. Et eksempel på dette kan være bruk av vernemaske under pussing av båt. Konkret arbeidsplassering: Arbeid som krever verneutstyr, skal foregå på egne områder for å begrense fareområdet ved eventuelle arbeidsulykker. Arbeidet ønskes delt opp i ulike underavdelinger/områder, slik at mest mulig av arbeidet innenfor de ulike avdelingene skjer innenfor ett gitt område. Arbeidsulykker: All form for arbeidsulykker (uønskede hendelser eller situasjoner) skal dokumenteres og sendes videre til HMS-ansvarlig, slik at forebyggende tiltak kan gjøres for å unngå gjentakende hendelser. Verneombud: Hver enkelt avdeling skal ha ett verneombud som skal ha som oppgave å kontrollere og etterfølge HMS kravene, samt rapportere videre til HMS-ansvarlige for prosjektet. Beredskap: Det skal gjennomføres scenariotrening, deriblant brannøvelser, sanitetsøvelser og lignende som er relevant for å håndtere uønskede ulykker på en best mulig måte. Bygning sikkerhet: Alle bygninger skal være sikret med varsling- og sikkerhetsutstyr for tidligst mulig deteksjon av eventuelle farlige situasjoner. Derunder brannalarmsystemer, brannslukningsutstyr m.m. Avfallshåndtering: All bruk av kjemikalier og andre miljøskadelig stoffer skal håndteres med tanke på miljøsikkerhet. Dette gjelder også generell avfallshåndtering. Det skal gjennomføres arbeidsmiljøundersøkelse for å ivareta og kartlegge arbeidstakerens helse og trivsel. Dette vil gjøre det lettere å iverksette tiltak for å forbedre arbeids- og læringsmiljøet på arbeidsplassen. Velferdstilbud: samtlige i prosjektet skal ha muligheten til å bli med på ulike velferdstilbud. Dette vil bli alt fra sosiale sammenkomster med familie og firmaturer, til ulike helsetilbud (legeundersøkelser, massasje, fysioterapi, etc.). side 13
14 Tiltak LODDING Lodding ble gjort i store rom med luftemulighet i form av luftrenseanlegg og vindu. Holdt avstand fra loddetinn under lodding PUSSING AV SKROG Pussing av skrog ble gjort med vinduene åpne, i tillegg brukte vi åndedrettsvern og briller. Dette var for å forhindre å få det fine støvet i lungene og på øynene KAPPING MED STIKKSAG Når vi kappet med stikksagen valgte vi å bruke briller, for å forhindre eventuelle skader på øynene hvis f.eks bladet skulle knekke LAGE KRETSKORT Brukte vernebriller og hansker når vi laget kretskort. Det var for å forhindre å få de ulike væskene på hendene og øynene side 14
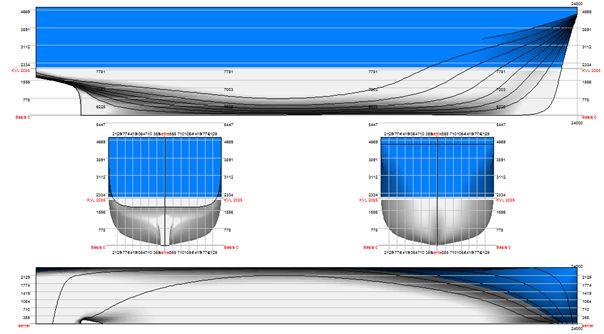
15 4. Dokumentasjon Gjennom å dokumentere arbeid kan vi få fram det vi har observert og utført under arbeidet. I tillegg skaper man sammenheng i prosessen, mellom det som er planlagt, utført og fremtidig arbeid. Kvaliteten på arbeidet utført sikres gjennom god dokumentasjonen. 4.1 Konstruksjon Skrog Vi samlet gruppen, slik at alle kunne komme med forslag og tanker om hvordan båten skulle bli. Noe av kravene vi satte intern i gruppa var: En rektangulær topp på båten V-skrog Styrekjøl God plass for å sikre oss nok plass, ved eventuelle avvik på utstyr og tanker Lage hangaren slik at den kunne åpnes uten at andre båter i området skulle kunne se det Alle dronene skulle kunne fly ut samtidig, slik at du kan også kan velge hvilken drone som skal ta av med tanke på om det er sprengnings-drone, jammer-drone. Grunnen til alle disse kravene var blant annet: En bulb så vi på som en lottokupong, der det ville være større risiko for at den ville forverre modellens egenskaper, da denne skal plasseres og pusses riktig for å få effekt ut av den. Styrefinnen ble også valgt for at fartøyet skulle få en mer stabil kurs rett forut. Vi valgte også å ha en flat topp, grunnen til dette er å holde luken skjult ved bruk, i tillegg til at båten vil komme nærmere mål usett på grunn av høyden på båten ikke er høyere enn nødvendig. Dette valgte vi, selv om dette er en taktisk dårlig ide med tanke på radarsignal fra oven. Deretter lagde vi tegninger av to forskjellige skrog, der vi skulle velge det skroget vi hadde mest tro på. Dette resulterte i enstemmig av dette skroget. side 15

16 side 16
17 Då vi bygget skroget printet vi ut tverrsnitt fra båten hver 5. cm i lengderetning. Deretter skar vi ut isopor etter hver av disse tverrsnittene. Vi limte først 3 og 3 seksjoner, og deretter disse sammen til komplett modell. Neste steg var rasping og pussing av skroget til vi var fornøyd med det i forhold til tegningen. side 17

18 Videre ble det laget uthuling til motorens plassering. I tillegg til dette skulle motoren bli plassert høyere enn vannlinjen for å forhindre lekkasje inn akslingen. Deretter boret vi hull til propellaksling og ror. Her var presisjonen mellom senter av propell og senter av ror viktig, noe som vi anså som vellykket. Vi la på totalt tre lag med sparkel som vi pusset ned etter hvert lag før vi var fornøyd med overflaten på skroget. For å sikre oss at sparkelen skulle bli skikkelig tørr, valgte vi å la skroget stå på badet da det er varmekabler i gulvet. side 18


19 For å finne en maling som var egnet for skipet, måtte vi teste mange ulike malingstyper. Derfor ble det gjennomført flere tester på isoporbiter med og uten sparkler. Til slutt enda vi opp med gråmaling og svartmaling. Da disse ikke viste noen tegn til negativ påvirkning på verken sparkelen eller isoporen. Først ble hele båten malt grå, og deretter et lag med svart bunn-maling. Grensen til bunn malingen ble bestemt av skipets dypgang med full last. Slepekrokene var neste på programmet. For å forsikre oss om at denne skulle tåle en slepekraft på 10 kg, ble det limt fast ei 6 mm kryssfinerplate som skulle få fordelt kraften fra slepekroken over et større areal. side 19
20 For å få festet hangaren og skroget sammen, valgte vi å bruke borrelås, da dette er kjapt og enkelt å demontere med tanke på justeringer, batteriskifte og lasting. Men opplevde da at det ble et mellomrom mellom hangaren og skroget, så dette løste vi ved å legge fugebånd rundt hele toppen av skroget. Når vi festet servoene valgte vi å løyse dette på forskjellig måte. Servoen til roret ble festet med borrelås, siden denne ikke trenger mye kraft for å rotere roret. Servoen til hangarluken trenger derimot en del mer kraft, i tillegg til at den må låses i en posisjon for å ikke raspe tennene til tannstangen og/eller tannhjulet. Derfor valgte vi å lime denne fast. Når omsider vi kunne teste båten på vannet såg vi at tyngdepunktet til båten var altfor høyt, derfor valgte vi å redusere vekten til hangaren, i tillegg til å lime to ekstra vekter på totalt 2,26 kg. I tillegg til at vi gravde ned en aksling langs kjølen av båten. Etter å ha limt fast motoren fikk vi testet den i tanken, og var veldig fornøyd med stabiliteten til båten, men oppdaga at når vi skulle bakke mot babord, så gjekk båten enten rett bakover eller svakt mot styrbord Hangar Gruppen satte seg ned i planleggingsfasen og diskuterte hvordan hangaren til modellen skulle konstrueres. Det var særlig to ulike utforminger gruppen så for seg kunne bli en løsning. 1. Bygge en hangar som ville splitte seg på midten og åpnes til hver sin side. 2. Bygge en hangar som ville fungere som en slags garasjeport. 3. Bygge en hangar som ville ei skyvedør. Gruppen ble enige om at nr.1 og nr.2 ville bli for komplisert til å la seg gjennomføre. Vi valgte derfor å gå for nr.3 da vi anså denne løsningen som den sikreste metoden, da det er færre komponenter, noe som gjør det enklere å endre dersom dette skulle bli nødvendig. Det som er negativt med denne løsningen er at GM vil endre seg når luka er åpen, i forhold til når den er lukket, i tillegg vil GM endre seg alt etter om det er droner, eller om det ikke er droner på båten. Først laget vi en hangar i 6 mm kryssfiner. Problemet med denne løsningen var veldig enkelt at tyngden på 1,67 kg var for tungt. Dette trodde vi kunne ordnes ved skifte ut flatene med papp, og få redusert vekten ned til 1,29 kg. side 20

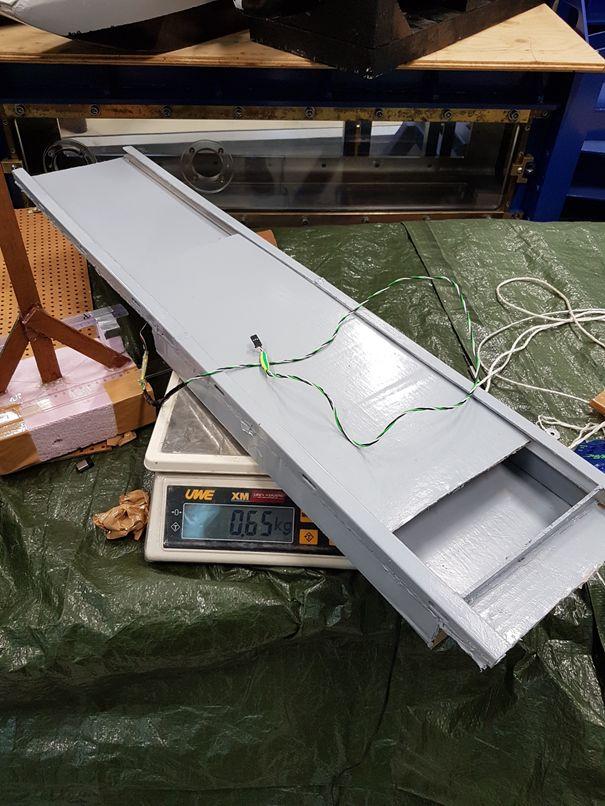
21 Båten ble mer stabil, men langt fra tilfredsstillende for målet vårt. Dermed bygget vi hele hangaren i papp. Det eneste som ikke var av papp var selve skinnene, dette gjorde at vekten ble redusert til 0,65 kg og båten ble meget stabil. side 21
22 side 22

23 side 23


24 For å få luka til å skyve seg frem og tilbake trengte vi en tannstang og et tannhjul, som en servo skulle være festet til selve hangaren, og tannstangen skulle være montert på luka. Dette var vanskelig å få tak i og vi bestemte oss derfor for å laste ned tegninger fra tracepartsonline.net og 3D-printet dette Utfordringer underveis For tung hangar i forhold til båten. Båten klarte ikke å bakke mot babord. Da vi limte på den ene seksjonen, så ble ikke den 100% rett, og dermed blei ikke bunne i et område heilt rett, noe som gjør at den krenger litt mot babord uten last. Akslingen til servoen som er festet i tannhjulet begynte å glippe, løste dette ved å lime det svakt fast Forskjell på modellen og en fullskala Materialet ville blitt bygd i mer solid materiale. Båten og hangaren hadde vært en stor del, og ikke todelt. Luka hadde fått en annen patent for å få den tett. Når det gjelder sjøsikring av dronene, så måtte vi funnet en løsning for å sikre at dronene hadde stått fast under røff sjø. Slepekrokene ville aldri blitt montert påfullskala, grunnet dette blir kun brukt under forsøk i slepetanken. Overflatene på skroget er for flate med tanke på radarsignal, ville derfor lagd skroget mer bueformet og alle flater ville vi konstruert med en vinkel på 3 grader. side 24

25 4.1.5 Avvik fra modellen og tegningen Hva Mål tegning (cm) Mål modell (cm) Avvik fra tegning (cm) Totallengde Bredde aktre del 20,8 20,5-0,3 Bredde midtre del 20,8 20,7-0,1 Bredde forut 20,8 20,4-0,4 Totalhøyde 20,8 20,5-0,3 Vannlinje 97,1 97, Kjemikalier Lim Limet vi valgte å bruke er Biltema sitt universallim. Dette ble valgt fordi det allerede var kjøpt inn som hensikt til å lime skroget og andre deler. side 25



26 Sparkel Til sparkling valgte vi å bruke to forskjellige typer. Biltema sitt våtromssparkel og lettsparkel. Det ble først lagt to lag med våtromssparkel og det siste laget med lettsparkel. Grunnen til valget av disse typene var fordi våtromssparkel var godt egnet til fuktige rom og partier. Våtrom: /Maling-og-Fuging/Sparkel/ Veggsparkel-LW / Lettsparkel: /Maling-og-Fuging/Sparkel /Lettsparkel / Maling Før vi bestemte oss for maling testet vi de ulike typene på isoporbiter, med og uten sparkel. Dette gjorde vi for å hindre at malingen skulle ødelegge skroget. To av testene ble seende slik ut: Til høyre ser vi at malingen etser bort isoporen. Til venstre ser vi at malingen har fått isoporen til å krympe. Vi endte opp med å bruke Pilot sin alkydmaling maling fra Jotun. side 26
27 4.1.7 Innkjøp Fugebånd 45/ Lett sparkel Vanlig sparkel / Pussepapir (K240) / Borelås Øyebolter Tannstang Tannhjul side 27
28 4.1.8 Drift og vedlikehold av modellen Før drift 1. Kontrollere at alle komponentene sitter fast. 2. Kontrollere tannhjul og servo. 3. Kontroller at det er strøm på batteriet. 4. Skru på strømmen til kontrollen og strømbryteren i båten Under drift 1. Stopp motoren til servoen i det luka er lukka. 2. Ikke la luka gå for langt opp, da det ikke er stoppemekanisme på den. 3. Løft av hangaren og for å kontrollere at det ikke lekker vann inn i båten Etter drift 1. Skylle skroget med ferskvann hvis den har vært i sjøvann. 2. Løsne hangaren sånn at eventuell fuktighet på innsiden av skroget skal fordampe. 3. Kontrollere at alle komponentene sitter fast. 4. Kontrollere tannhjul og servo. 5. Ta litt grease på motorakslingen hvis det er nødvendig. 6. Skru av strømmen til båten og kontrollen. 7. Sett batteriene på lading Tyngdepunktsberegninger Hensikten med å regne ut de teoretiske tyngdepunktene er å få et inntrykk av hvordan båten vil flyte i praksis. Dette gjøres for å unngå stabilitetsproblemer når fartøyet skal sjøsettes. Utregningene har hjulpet i stor grad under bygging for å optimalisere utformingen av skipet både innvendig og utvendig. Det viste seg i ettertid at vi hadde behov for å flytte flere komponenter i forhold til hvordan vi opprinnelig så for oss fartøyet. Vi ønsket innledningsvis å ha et senter for tyngdepunkt som ligger lavt ned mot sjøen og midt i skipet i bredderetning, mens langskipstyngdepunktet valgte vi å få plassert lenger bak på skipet. I beregningene under er motor, ror, servo, radiomottaker, motorkontroller, og fast ballast medregnet som en del av skroget. Måten dette tyngdepunktet ble funnet på var ved hjelp av en enkel balansetest av skroget. Skroget ble plassert på en sylinder, og skjøvet frem helt til hele skipet balanserte på sylinderen. Dette ble gjort i alle tre aksene. Totallengden på båten er 97 cm, og tyngdepunktet langskips ligger ved ca 44 cm der akterenden på båten er definert som nullpunkt. Det vil si at vårt tyngdepunkt ligger 4,5 cm bak midtskip. Dette var for å oppnå en trimeffekt for å få båten til å gå bedre i vannet. Nå ligger akterdelen av skipet dypere i vannet en baugen. Dette gjør at skipet skjærer sjøen meget fint. Resultatet blir et skip som både er meget sjødyktig samtidig som det går meget fint under seiling. side 28
29 I bredden er det også et lite avvik. Skipet er 20 cm bredt, og tyngdepunktet ligger på ca 10,1 cm der babord side er definert som nullpunkt. Dette har flere årsaker. Hovedårsaken er at vi har en servo montert i hangaren som ikke ligger midtskips. Derfor blir tyngdepunktet litt forskjøvet. Det at tyngdepunktet er forskjøvet viste seg faktisk å være en fordel. Dette fordi skroget vi har bygget ikke er helt symmetrisk. Så det forskjøvne tyngdepunktet fører igjen til at båten faktisk flyter bedre enn dersom tyngdepunktet hadde vært helt midtskips Til slutt har vi tyngdepunktet i høyden. Toppen av skroget er 22cm høyt, mens tyngdepunktet ligger på utrolige 7,5cm målt med bunnen av kjølen som nullpunkt. Innledningsvis hadde vi store utfordringer med den skalerte versjonen her. Grunnen var ganske enkelt at hangarbygget vårt var altfor tungt. Dette førte til at tyngdepunktet ble forskjøvet ekstremt høyt, og båten var særs ustabil i vannet. Tiltakene som ble gjennomført var at hangaren ble bygget på nytt i nytt materiale. Førsteutkastet var laget i tre, mens modellen vi gikk for er laget av en form for papp. Dette gjorde at vi over halverte vekten på hangaren. Dessverre var heller ikke dette nok, derfor ble det frest noen nye hull helt nede i skroget som ble fylt med bly. Dette gjorde to ting. Det flyttet tyngdepunktet ekstremt mye lenger ned. Vekten var derimot ikke bare langt nede, men og plassert i midten av bredderetningen. Dette gjorde at skipet ble mer stabilt i vannet og tåler vann bedre enn det gjorde før. side 29
30 Enhet Tyngde Lengde Bredde Høyde Påvirkning tyngdepunkt X-avstand Y-avstand [KG] [M] [M] Z-avstand X Y Z Skrog* 4,00 42,50 10,00 5,00 170,00 40,00 20,00 Hangar 0,70 42,50 10,50 19,20 29,75 7,35 13,44 Batteri 0,37 50,00 10,00 5,00 18,50 3,70 1,85 Drone 1 0,04 59,75 4,50 16,00 2,09 0,16 0,56 Drone 2 0,04 66,95 4,50 16,00 2,34 0,16 0,56 Drone 3 0,04 74,15 4,50 16,00 2,60 0,16 0,56 Drone 4 0,04 81,35 4,50 16,00 2,85 0,16 0,56 Drone 5 0,04 88,55 4,50 16,00 3,10 0,16 0,56 Drone 6 0,04 59,75 13,50 16,00 2,09 0,47 0,56 Droner7 0,04 66,95 13,50 16,00 2,34 0,47 0,56 Drone 8 0,04 74,15 13,50 16,00 2,60 0,47 0,56 Drone 9 0,04 81,35 13,50 16,00 2,85 0,47 0,56 Drone 10 0,04 88,55 13,50 16,00 3,10 0,47 0,56 Tank stor 1 0,57 40,00 5,00 6,00 22,80 2,85 3,42 Tank stor 2 0,57 40,00 5,00 6,00 22,80 2,85 3,42 Tank stor 3 0,57 54,00 15,00 6,00 30,78 8,55 3,42 Tank stor 4 0,57 54,00 15,00 6,00 30,78 8,55 3,42 Tank liten 1 0,29 10,00 6,00 7,00 2,90 1,74 2,03 Tank liten 2 0,29 10,00 10,00 7,00 2,90 1,74 2,03 Tank liten 3 0,29 10,00 14,00 7,00 2,90 2,90 2,03 Tank liten 4 0,29 20,00 6,00 7,00 5,80 4,06 2,03 Tank liten 5 0,29 20,00 10,00 7,00 5,80 2,90 2,03 Tank liten 6 0,29 20,00 14,00 7,00 5,80 4,06 2,03 Tank liten 7 0,29 73,00 8,00 7,00 21,17 2,32 2,03 Tank liten 8 0,29 73,00 16,00 13,00 21,17 4,64 3,77 Tank liten 9 0,29 73,00 10,00 13,00 21,17 2,90 3,77 Tank 10 0,29 86,00 10,00 14,00 24,94 2,90 4,06 side 30
31 Verdiene i tabellen over er hentet ut fra et Excel dokument og viser hvordan utregningene av tyngdepunktene har blitt gjort. Lengden, bredden og høyden er avstander fra nullpunktet til alle tre aksene. Det nullpunktet er plassert helt akterut, helt til styrbord og helt nederst ved det laveste punktet på kjølen. Alle disse verdiene fører til enda en tabell som oppgir totalvekt, og plassering av de ulike tyngdepunktene. Totalvekt Tyngdepunkt X Tyngdepunkt Y Tyngdepunkt Z Tallverdi Enhet 10,60 kg 43, cm 10, cm 7, cm Det at skipet ikke er helt symmetrisk rent skrogmessig har gitt en del utfordringer. Blant annet har dette påvirket styre- og manøvreringsegenskapene til skipet. Dette førte i hovedsak til to utfordringer. Den første store utfordringer er at dersom skipet føres rett forut vil det trekke mot babord i en eksponentielt økende grad. Utfordring nummer to er at skipet kan kun manøvreres en vei ved seiling bakover. Det at skipet trekker til babord under seiling ble oppdaget ganske raskt etter sjøsetting av fartøyet. Ved nærmere inspeksjon av både ror og propellstilling fant vi ut at dette ikke var grunnen til avviket. Det viste seg heller at unøyaktigheter i skroget var grunnlaget for påvirkningen. Vi diskuterte om hvorvidt vi skulle begynne å bearbeide skroget på nytt for å jevne ut forskjellene, men besluttet å la være. Det gjorde vi fordi vi ikke anser det som hensiktsmessig å bruke mer tid og penger på å prøve og fikse en ganske liten feil som ikke nødvendigvis lar seg løse i det hele tatt. Det at skipet kun kan svinge en vei når det blir ført akterut viste seg derimot å bli en større utfordring. Når skipet føres bakover er det kun mulig å svinge det mot styrbord. Dersom en prøver å styre svinge roret slik at skipet skulle gått mot babord har det ingen innvirkning på måten båten seiler. Det vil si at om svingespaken er snudd helt i ytre posisjon eller om den står i nøytral posisjon har ikke dette noen form for innvirkning på måten båten beveger seg i vannet Vi anså dette som en ganske alvorlig feil i produksjonen, men valgte heller ikke her å starte en prosess med å bearbeide skroget. Dette henger sammen med argumentasjonen vi brukte når vi diskuterte sving-egenskapene til skipet over. Det at vi ikke kunne garantere et bedre resultat, og i verste fall et dårligere resultat, gjorde at vi besluttet å ikke starte en omfattende jobb på skroget. side 31
32 For utenom disse to feilene fungerer fartøyet meget bra i vann. Så lenge vi har motorkraft i fartøyet behersker det stygg sjø overraskende bra. Utformingen av baugen gjør at det skal særdeles mye til før det går vann over og opp på dekk. Som beskrevet under tyngdepunktsutregningene er det vertikale tyngdepunktet veldig lavt. Dette fører som sagt igjen til at båten er veldig stabil, og retter seg fort opp i nøytral posisjon etter at en bølge har truffet skroget. Både når det kommer til tyngdepunkt og manøvreringsegenskaper er vi summa summarum ganske fornøyd med produktet. Så alle produkter har vi både styrker og svakheter ved konstruksjonen, men vi mener våre styrker overskygger svakhetene, og at de verdiene vi har fått ut er respektable. side 32

33 4.2 Fremdriftssystemer, styring og mekanikk Motor Motoren som blir brukt for å få fremdrift på modellen, er Robbe EF 76/2. Diameter Vekt Spenning Lengde Turtall Max tillatte strøm 38.0 mm 210 g 6-8 V 57 mm 4200 rpm 20,0 A Dette er en liten, men kraftig nok motor til modellen vår og passer derfor godt til vårt bruk. side 33

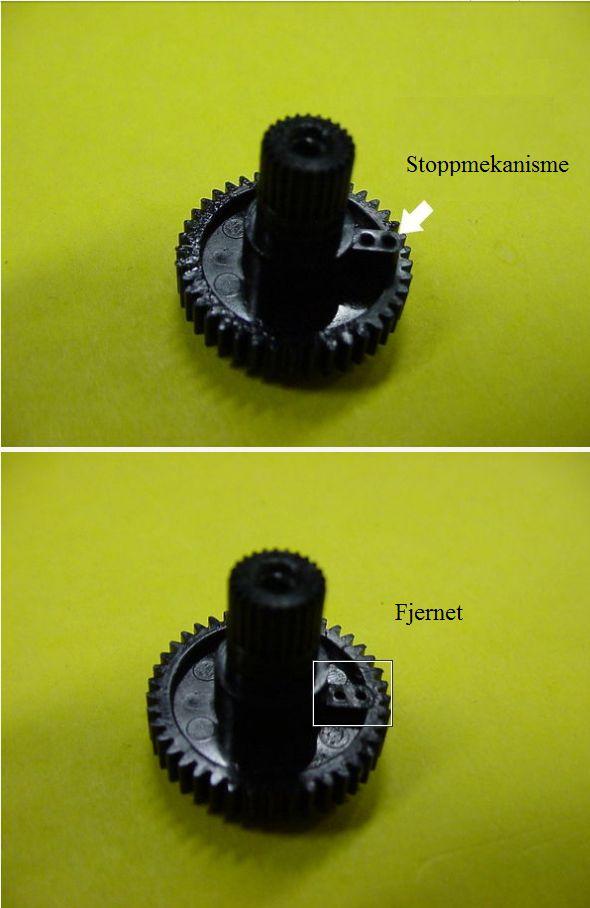
34 4.2.2 Servo Til roret har vi brukt en servo av typen S3003 Futuba. Denne ble brukt til å regulere roret. Servoen passer godt til bruk i modellen, da den har lav egenvekt og er kraftig. En grunn til at den passer godt til roret, er fordi den roterer 90 grader til hver side. (Fullt utslag er 180 grader.) For å styre åpningen av hangaren modifiserte vi servoen, slik at den roterer med full omdreining (360 grader) gjentatte ganger. Dette gjør at den kan åpne og lukke hangaren på en hensiktsmessig måte Modifikasjon av servo Det første vi gjorde var å demontere servoen ved å bruke skrutrekkeren for å fjerne de fire skruene som holder lokket på baksiden av servoen sammen. Deretter separerte vi delene forsiktig, slik at vi ikke mistet noen av delene. For å få servoen til å rotere kontinuerlig uten stans, måtte vi gjøre to ting. Den ene var å ta ut potensiometeret. Oppgaven til potensiometeret er å fortelle servoen posisjon til kontrollarmen. Vi fjernet stoppmekanismen som hindrer servoen i å rotere for langt. For å fjerne denne «stoppe» mekanismen så vi på innsiden av servoen, som illustrert på bildet. Etter dette er servoen evig roterende. side 34
35 side 35
36 4.2.3 Batteripakke Batteriet brukt i det elektroniske systemet heter NI-MH 7.2v 3000 og fungerer på en ypperlig måte til vårt bruk. For å undersøke om batteripakkene leverer det de står merket med gjorde vi et forsøk på dette. Vi koblet opp kretsen som illustrert på tegningen, med to batterier som begge består av en last (en på 1Ω, og den andre på 2,2Ω). I tillegg overvåket vi forandringen i spenning over tid og gjorde en beregning på hvor mye strøm som går ut av batteriet til enhver tid. Da vi koblet til batteriene og begynte å loggføre merket vi fort at motstandene begynte å bli varme. Derfor ble de lagt på et brannsikkert underlag. side 36
, mens det står at batteriet skal")
37 Resultater Ut ifra dette får vi at: Det ene batteriet greier 3A i 30 min(ca 1500mAh), mens det står at batteriet skal klare 3000mAh. Det andre batterier klarer 6A i 30min(ca 3000mAh), så dette stemmer overens med merkingen på 3000mAh. side 37


38 4.3 Elektronikk og styresystemer Oversikt over kanaler Kanal (mottaker) Kontroll Funksjon Port, NI USB Opp/ned venstre spak Thrust AO0 2 Opp/ned høgre spak Hangar PO DAC 3 Sidelengs venstre spak Ror A01 4 Sidelengs høgre spak Ikke i bruk N/A RC kontrollen For å styre modellen fikk vi utlevert en Futuba T4YF skysports fjernkontroll. Denne skal bidra til å styre modellen direkte fra kontrollen, men også kobles til en datamaskin for å styres ved hjelp av en programvare. Vi valgte å bruke Labview for å gjennomføre dette. En morsom detalj ved denne kontrolleren er at den tilsynelatende antennen faktisk ikke har noen funksjon! Det er kun en plastbit. Markedsføring på sitt beste. Kontrollen lyser grønt når den er på, og blinker rødt før batteriet går tomt Tilkobling På fjernkontrollen utlevert var det allerede koblet til en ethernet-port som gikk videre til stikkene. (Høyre er koblet til, venstre har ingen funksjon) Dette gjorde at vi lett koble til kontrollen til mikrokontrolleren. Tre brytere på siden av kontrollen lar oss byttes mellom direkte styring fra kontrollen og pc-styring. Siden mikrokontrolleren kun hadde to analoge utganger, måtte vi lage en 4 bits D/A omformer og benytte oss av fire digitale utganger. På neste side er et bilde av innsiden av kontrolleren. Øverst kan vi se ethernet-porten som vi kan koble mikrokontrolleren vår i. I tillegg kan vi se de tre bryterne som bytter mellom kontroll- og datastyring. Bryterne har tre stillinger; data, fri og spak. side 38

39 Brytere Brytenes funksjon: Stilling Venstre Midtre Høyre Funksjon Mikrokontroller Ingen signaler Spaker side 39

40 Koblingsskjema RC kontroll Figuren over illustrerer hvordan koblingsskjemaet for RC-kontrollen ser ut. side 40
41 National Instruments USB-6008, mikrokontroller Her ser vi blokkdiagrammet til mikrokontrollere i fra National Instruments. Det viktigste å ta med seg ifra dette bildet er at den kobles til PC-en med en USB. Den har en strømforsyning på 5V med 200mA. Mikrokontrolleren har to analoge utganger, AO 0 og AO1, åtte analoge innganger, AI 0-7, i tillegg til flere digitale utganger. side 41
42 Her ser vi mikrokontrolleren som blir brukt sammen med LabVIEW 8.0 til å data-styre båten. Legg merke til hvordan det er montert skinner på hver side hvor man kan feste kabler til utgangene Merk! Når man kobler boksen inn i en ny PC eller en ny boks i samme PC blir man nødt til å sette opp portene i DAQ assistant igjen! side 42
43 Koblingsskjema system Bildet under illustrerer hvordan systemet i båten henger sammen. Motor-kontrollen gir strøm til mottakeren og motoren. Servoen til hangar er evig-roterende og vil kunne gjøre så mange omdreininger man trenger for å åpne luka. Servoen til roret derimot har et begrenset vinkelutslag. side 43


44 Design av D/A-omformer Her er bildet av PCB-designet til D/A-omformeren som er koblet i mikrokontrolleren. Kretskortet ble designet i programmet ExpressPCB. Motstandene koblet til er på 10kΩ, 20kΩ, 40kΩ og 80kΩ. Den største motstanden er på den laveste bit-verdien. Under ser vi tallverdien og tilhørende analog spenning ut. Under ser vi slik designet ser ut i programmet PCB express. side 44

45 4.3 Styresystemer i Labview 2009 I kravdokumentet står det beskrevet at fartøyet skal kunne styres ved hjelp av en radiokontroller, data ved bruk av radiomottaker og Wi-Fi-mottaker. For å gjennomføre dette benyttet vi dataprogrammet Labview til å lage et kontrollpanel, som kan brukes til å styre fartøyet. Under er det en illustrasjon over hvordan frontpanelet og blokkdiagrammet i helhet ser ut. For å forklare hvordan dette er satt sammen, har vi valgt å se på hver enkel sammensetning, slik at leseren får en bedre forståelse av programmet Frontpanel side 45

46 4.3.2 Blokkdiagram side 46
47 4.3.3 Dynamisk posisjonering Dynamisk posisjonering er først og fremst en metode brukt av skip og halvt nedsenkbare plattformer i samme posisjon over havbunnen uten bruk av anker, men ved bruk av fartøyets egen fremdrift. Dynamisk posisjonering krever n egen datamaskin som samler data om bølgenes virking på skroget, om vind, hvilken retning fartøyet peker i og nåværende posisjon. Utfra denne dataen sendes det så kommandoer til fartøyets propeller, ror og thrustere Bruksområder I senere tid har konseptet dynamisk posisjonering også omfattet nøyaktige forflytninger. Dynamisk posisjonering vil kunne benytte seg av en absolutt posisjon over et fast punkt eller så kan den være relativ til et bevegelig objekt som et skip eller en undervannsfarkost. Offshoreindustrien har et stort behov for fartøyer med dynamisk posisjonerings muligheter. Dykkebåter, shuttletankere, supplybåter, kabelleggere, rørleggingsfartøy, steindumpere, kranfartøy, borerigger og boreskip benytter denne raskt voksende teknologien. Cruisenæringen drar også nytte av dynamisk posisjonering. I stedet for å kaste anker på et korallrev kan cruiseskipet nå ligge stille uten bruk av oppankring ved hjelp av propeller. side 47


48 Parametere Her settes alle parameterne brukt til utregninger i programmet. Anbefalte verdier er empirisk testet, og henter seg hurtig og nøyaktig inn i rett posisjon. Alle verdier i programmet starter på anbefalte verdier. Så det eneste brukeren trenger å gjøre er å kjøre programmet. Dersom man er en avansert bruker kan man endre på parameterne til sine preferanser. I dette panelet kan vi også se tallverdi på hastigheten til fartøyet, den deriverte. Hvor lenge og langt den har vært ute av posisjon, integralet. Hvilken tick programmet er i. Et tick er en syklus i programmet. Trickraten er hvor ofte programmet oppdaterer seg og gjør utregninger. Differanse er avstand ifra målet. Nåværende posisjon er gitt ved er. Ønsket posisjon settes ved parameteren skal. Parameterene under WiFI er viktig at stemmer for å kunne sende til Wifi-mottakeren. I tillegg må man sørge for å være koblet til mottakeren D ynamisk P osisjons S ystem side 48

49 På dette dashbord-elementet kan vi se hvor langt unna målet på en mer grafisk måte. Dersom differansen ligger i mellom -0.5 og 0.5 vil visere vise «nærme», videre i mellom -1 og 1 vise «langt unna» og så -2 og 2 «veldig langt unna». Bryteren «DPS», styrt med F3, skrur av og på vårt «Dynamisk posisjonssystem». Dersom bryteren er tent er systemet på. Skal slideren bestemmer ønsket posisjon. Er slideren indikerer hvilken posisjon man er i. Er verdien hentes fra et potensiometer. Her kan vi se den delen av programmet som håndterer den dynamiske posisjoneringen. Programmet plusser sammen differansen, stigningstallet og integralet (med hukommelse). Utifra dette gir den et ut-signal til motoren i båten. LabVIEW-filen ligger tilgjengelig på side 49

50 nettsiden vår ved interesse. Slik programmet er nå kan DPS kun benyttes med Radio-overføring. For å gjøre DPS WiFi-kompatibel ville det ikke vært et stort inngrep. Det infrastrukturen til programmet kan bygges videre. I utgangspunktet skal det bare være å koble på og finne de parametrene som gir ønsket resultat Posisjonsdata På dette plottet kan vi se en historikk av det analoge innsignalet (les: posisjonen i hvitt. I tillegg kan vi se integralet gjengitt i rødt og den deriverte i grønt. Bryteren «Integral», styrt med F4, skru av og på om integralet skal tas med i beregningen. En annen ønsket funksjon knappen har er å resette verdien til integralet. Brukeren anbefales til å skru av integralberegning ved manuell styring og skru på «Integral» etter at «DPS» er skrudd på. Integralet er på når bryteren er tent. I LabVIEW side 50

51 ser vi at bryeren veksler imellom å huske integralet og å sende en null Lukekontroll Luken betjenes ved dette panelet. Servostyringen til luken aktiveres med bryteren «Servo», styrt med F5. Servomotoren er på når bryteren er tent. Når luken aktiveres vil den grønne firkanten under begynne å blinke gult med sort tekst blinkende rødt. Teksten sier «!! LUKE I DRIFT!!» Retningen som luken skal bevege seg er gitt ved bryteren «Åpne / lukke», styrt med F6. Indikatoren under forteller hvilken vei luken vil bevege seg dersom bryteren «Servo» er tent. Når «Åpne / lukke» er tent vil luken åpne seg. side 51


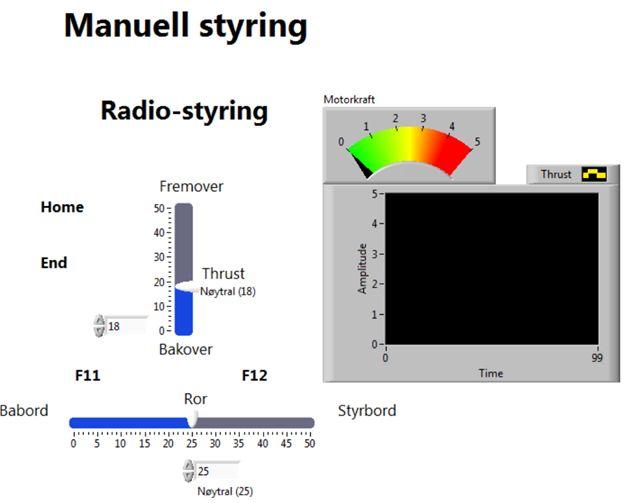
52 Manuell styring På neste side ser vi de to forskjellige typene manuell styring vi har, radio- og WiFi-basert styring. Den radiobaserte styringen sender signalet sitt igjennom en radiokontroller av merket «Futaba» og til en mottaker fra samme produsent. NI USB-6008 sine analoge ut-porter er koblet til spakene på kontrolleren ved hjelp av en CAT-5 kabel. Ved å sette en spenning på 1.8V over spaken er den i «nøytral» stilling. Ved å øke spenningen Går sender den signal den ene veien, og ved å senke spenningen motsatt retning. Radio-styringen sin thrust øker med «Home» og minker med «End». Spaken kan få porten til å sette en spenning ifra null til fem volt. Spaken er ganget opp med en tiendedel slik at den ikke skulle bli så følsom ved tastaturstyring. På bildet kan vi se bryteren som bytter mellom DPS og manuell styring side 52

53 side 53

54 Kalibrering av DPS Programmet ble først testet med en viftevogn ifra leverandøren Pasco. Det viste seg at programmet gjorde det bra i vannet med de samme parameterne. Ønskelig scenario er å ikke passere skal posisjonen mer enn en gang. Vi ønsker at programmet hurtig skal finne tilbake til posisjon. En problemstilling ved å komme hurtig tilbake til posisjon er at det innebærer en fart som fartøyet vil ha med seg over den ønskede posisjonen. Dermed vil den måtte bremse og snu etter å ha passert ønsket posisjon. Med parameterne i programmet nå vil den svinge minimalt over ønsket posisjon, men fortsatt bevege seg tilfredsstillende raskt. side 54

55 4.3.4 Wifi Vi valgte å implementere WiFi og radiostyring under samme panel. Grunnet dette fjernet vi WiFI-styringens evne til å skrive feilmeldinger, da vi som oftest styrte den uten. Dette er noe brukeren må være bevisst på, og dersom programmet ikke fungerer som ønsket kan det være lurt å skru på feilmelding ved å legge funksjonen til i blokkdiagrammet. Som figuren over viser går thrusten fra og roret fra De teoretiske verdiene er 0-255, men det viste seg at dette ikke fungerte i praksis. I det øyeblikket thrusten overstiger sin maksimale verdi på 232, vil motoren slå seg av. Det samme skjer dersom man senker thrusten til under 61. Dersom man overstiger 245 på roret, vil nøyaktig det samme forekomme som for thrusten. Det samme gjelder dersom man senker roret til under 20. For utenom dette har vi brukt IP-adresse og port nummer for å sende signaler til mottakeren. I blokkdiagrammet startet vi med en TCP open connection, som setter visse parametere som i dette tilfellet var IP-adresse og TCP- port. Denne skriver ut to verdier. Den gule, error out verdien, og den mørkeblå, connection ID-tråden. Disse trådene går inn i en TCP write som også her får inn en verdi. Den siste verdien er en string som gir ut 9 kanalverdier. Disse kanalverdiene har en tallverdi mellom 0 og 255 og i dette tilfellet anses 127 å tilsvare nullverdi. Dette er til bruk, fordi alt under 127 blir ansett som bakover, og alt over 127 er «fremover». side 55
56 Kanalfordeling Syv av de ni ulike kanalene har blitt satt til faste verdiene. Port 0 har verdi 0 og fungerer som jording. Alle andre kanaler utenom kanal 4 og 8 har konstant verdi 127. Dette vil med andre ord si at de ikke gjør noe. Kanal 4 på kretskortet er koblet til thrusten, og er koblet til en slide som har verdi mellom I praksis er denne verdien fra Alle verdier under 127 vil føre til at fartøyet går bakover og verdier over 127 fører til at fartøyet går framover. Kanal 8 fungerer på samme måte som thrusten, men denne kanalen har som oppgave å styre roret. Alle de overnevnte detaljene om programmet kjøres gjennom en «while-loop» som illustrert i blokkdiagrammet. Deretter sendes dette inn i en TCP close connection for å slutte programmet og sende verdiene. Dette kjøres også gjennom en «while-loop» slik at programmet kontinuerlig sender ut verdier til mottakeren. Dette fører til at eventuelle verdiendringer blir sendt til mottakeren Erfaringer Under arbeidet med å konstruere dette programmet støtte vi på noen utfordringer. Den første utfordringen vi møtte på var at noen av konstantene og sliderne ga ut feil datatype. Dette ble enkelt endret gjennom deres egenskaper. Den andre og kanskje største utfordringen var at den ene «add» porten ga ut en annen datatype enn det den fikk inn. Vi fikk ikke opp noen feilmeldinger i programmet når vi kjørte programmet, men det var heller ingenting som fungerte slik det skulle. Dette medførte at vi besluttet å bygge hele programmet på nytt igjen. Dette resulterte i at programmet fungerte i tråd med hensikten til programmet. side 56

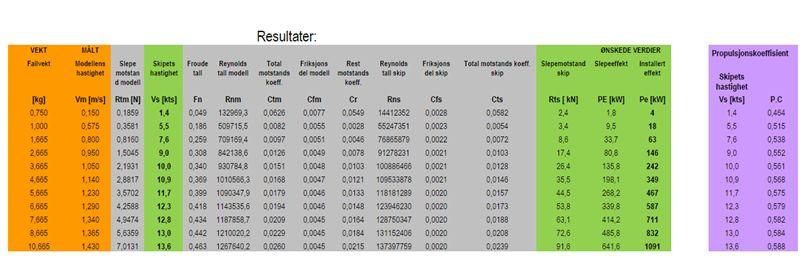
57 5. Testresultater Gjennom prosjektarbeidet har vi arbeidet mye med forskjellige oppgaver. Vi har blant annet jobbet mye med skroget i Freeship, men også det elektroniske i Labview. Gjennom å teste om skrogets egenskaper og om produktet produsert i Labview fungerer slik det skal. Ved å teste produktene vi har konstruert, vil vi kunne avdekke eventuelle feil og mangler som må justeres. Vi testet blant annet dynamisk posisjonering, krengetest og slepetest med mer. Under er de ulike testene beskrevet og resultater ført opp. 5.1 Slepetest Hensikten med slepetesten er å kartlegge modellens motstand og effektbehov Sammendrag av slepetest Dette ble gjennomført ved at modellen ble lastet med vekt tilsvarende full tonnasje. Vekten til modellen og tettheten til vannet i tanken bestemmer fulldataskala. Vannlinjen til modellen er allerede bestemt ved hjelp av Freeship. Vi bestemmer vannets tetthet og kinetisk viskositet(tyktflytende) ved å måle temperatur. Modellen vår ble trukket med følgende vekter (i kg): 0,750; 1,000; 1,665; 2,665; 3,665; 4,665; 5,665; 6,665; 7,665 og 8,665. Dette ga modellen ulike hastigheter. Hver hastighet ble registrert ved hjelp av LabVIEW måleutstyr da hastigheten var konstant. Slepevekt med tilhørende hastighet og skipsdata ble lagt inn i kalkulator for beregning av slepeeffekten i stor skala Resultater side 57

58 side 58

59 Kurven viser farten til modellen langs x-aksen med kraft den blir dratt med på y-aksen Kurven viser hvilken effekt som må til på skipet for å oppnå hastigheten på x-aksen side 59
60 Kurven viser restmotstandkoeffisienten, og her kan vi blant annet finne ut av at båten er mer økonomisk å kjøre på 5,5 til 6,7 knop enn fra 9 til 10 knop. side 60
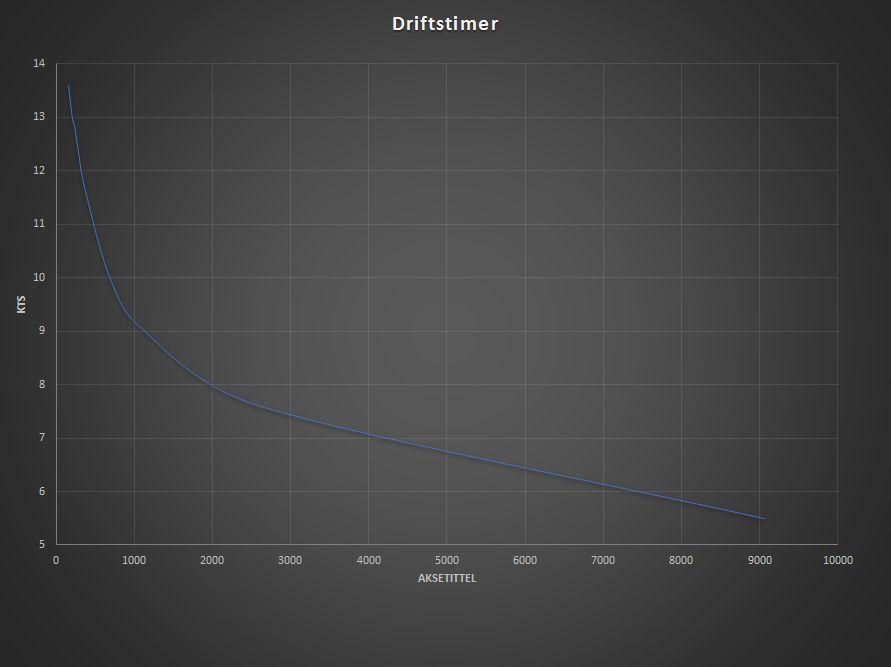
61 5.1.3 Rekkevidde og drivstoff forbruk Rekkevidde og drivstofforbruk ble beregnet ut fra slepeforsøket. Det er satt som krav at fartøyet skal kunne drive aktivitet i minimum 30 dager og kjøre 1000 nm på 72 timer. På fult pådrag kjører fartøyet 13.6 knop. som er rett i underkant av 1000 nm. Når det gjelder drift av båten, kan den ved full hastighet kan skipet kjøre i 158 timer, rett i underkant av 7 døgn. Ved 25% pådrag har skipet en fart på 10 knop og kan kjøre 668 timer, som tilsvarer 28.7døgn. Ved en hastighet på 5 knop kan skipet opererer i hele 377 døgn uten å fylle tanken, Fartøyet ligger rett under kravene til hastighet, men den gjør mere enn godt nok opp for det med å kunne operere selvstendig i lange perioder. Knop Driftstimer Driftsdøgn Rekkevidde(nm) side 61
62 side 62
63 5.2 Krengetest Hensikten med krengeforsøket er å bestemme metasenterhøyden og tyngdepunktets vertikale plassering til et skip ved gitt deplasement Sammendrag av krengetest Det første vi gjorde i forsøket var å sette opp utstyret som skulle benyttes. Deretter leste vi av ulike verdier fra pendelutslaget, som vi tok med oss videre til Freeship hvor vi beregnet metasenterhøyden og tyngdepunktets vertikale plassering Teori M = Metasenter G = Tyngdepunkt B = Oppdriftssenter K = Kjøl side 63
64 Sammenhengen mellom krengende moment (w * t) og tangens til krengevinkelen er gitt ved følgende: Moment tatt om metasenter (M): G G Geometri: vekt (w) arm (t) = deplasement (Δ) G G = G M t an θ GM er avstanden mellom metasenteret og tyngdepunktet. Dette gir følgende formel: GM = w t * tanθ Δ For å måle krengningsvinkelen brukte vi tangens som er gitt ved: motstående katet tanθ= hosliggende katet = s l s Θ l Figuren under illustrerer forskjellen mellom, samt vinkelen ( ) mellom metasenter og oppdriftssenter ( B ). For krengevinkler mindre enn ca 7 º, er metasenterhøyde (GM) et fast punkt i fartøyet og dermed en fast bestemt størrelse. Ved å utsette modellen for ulike krengende momenter, til styrbord og babord side får vi et grunnlag for å lage et plott av sammenhengen mellom krengemoment og krengevinkel Fremgangsmåte 1. Først rigget vi til pendel, linjal og avstivning for linjal/vekt på modellen. Vi målte side 64
65 deretter lengde ned til linjal hvor pendelutslaget leses av. Denne lengden ble målt til 38,5 cm. 2. Deretter veide vi modellen, uten last, med krengevekter og målingsutstyr. Dette ble gjennomført før vi satte modellen på vannet. Modellen med krengevekt på 100g, og måleutstyr veide totalt 5240 g. Vi satte nullpunktet vårt til å være midt i skipet. Målene på linjalen viste da 10 cm. 3. Vi plasserte modellen i slepetanken, og satte krengevekten midtskips slik at modellen ikke krenget. Vi noterte pendelens stilling til å være 10,4 cm på linjalen. Dette medførte at pendelutslaget var 0,4 cm mot babord side på modellen. 4. Etter dette flyttet vi krengevekten 4 cm vekk fra midtskips til babordside og målte pendelutslaget til å være 1,7 cm. 5. Vi flyttet krengevekten 8 cm vekk fra midtskips til babord side og noterte tilhørende pendelutslag til å være 3,5 cm. 6. Videre i gjennomføringen satte vi krengevekten til opprinnelig posisjon midtskips og så at dette stemte med 10 cm. 7. Vi flyttet krengevekten 4 cm vekk fra midtskips til styrbordside og målte pendelutslaget til å være 1,1 cm. 8. Vi flyttet krengevekten 8 cm vekk fra midtskips til styrbordside og målte pendelutslaget til å være 3,0 cm. 9. Deretter lagde vi en tabell, fylte inn resultatene og trakk etter beste evne en rett linje gjennom punktene. 10. Ut i fra linjens stigningsforhold og modellens totalvekt under forsøket, beregnet vi tilslutt modellens metasenterhøyde, GM, under forsøket. 11. Til slutt gikk vi inn i Freeship og fant modellens metasenter avstand i forhold til kjølen (KM T ) ved det deplasementet (forsøk). Med denne og den beregnede GM ble modellens endelige vertikale tyngdepunkter, KG (VCG) beregnet. side 65
 0,1 kg 5,24 kg 38,5 cm side")
66 Krengevekt Deplasement forsøk Pendelens lengde (l) 0,1 kg 5,24 kg 38,5 cm side 66

67 5.2.4 Resultater Forflytning krengevekt (cm) midtskips 4 cm 8 cm Avvik styrbord (SB) 0 cm 1,7 cm 3,5 cm Krengning (SB) i grader 0 cm 2,53 5,2 Avvik babord (BB) 0,4 cm 1,1 cm 3 cm Krengning (BB) i grader 0,6 1,64 4,5 Ved hjelp av tabellen får vi en bedre oversikt over verdiene vi fikk i forsøket. Hvordan vi kom frem til resultatene er forklart i fremgangsmåte. For å finne krengningen i grader måtte vi derimot foreta en enkel beregning, forklart over. side 67
68 Deretter setter vi dette inn i formelen Babord forflytning (0.04 m) gir GM BB(0.04m) = m. Babord forflytning (0.08 m) gir GM BB(0.08m) = m. Styrbord forflytning (0.04 m) gir GM SB(0.04m) = m. Styrbord forflytning (0.08 m) gir GM SB(0.08m) = m. Vi regnet ut hvor mye deplasement fra forsøket ville blitt i stor skala. s= * * = 5.24 kg * 24 3 * = 74.4 tonn λ 3 ps ρf s = deplasement i stor skala = deplasement forsøk Deretter gikk vi inn i Freeship og endret dypgangen slik at deplasementet ble tilsvarende 74.4 tonn λ KM T = = * 1000 = 10,95 cm. Videre gjør vi om verdien for å få den til å være i samme skala som modellen, 1:24. Når vi nå har funnet KM T og har GM forsøk kan vi regne ut KG forsøk. Dette gjøres ved å ta KG forsøk = KM T GM forsøk = = 8.99 cm. Dette er KG med rigg. side 68
69 Graf Grafen viser et tilsynelatende konstant forhold mellom krengevekt og vektarm. For å finne metasenterhøyde (GM) bruker man dette forholdet. Grafen ble laget i excel og linjen mellom punktene er laget etter beste evne. Grunnen til dette var for å finne den lineære funksjonen mellom punktene. side 69

70 (KG W ) vekt med rigg KG modell = W vekt rigg rigg 8,99 5,24 24,13 0,23 5,24 0,23 = =8,29 cm. KG KG λ = 0,0829 m 24 = 1,99 m. fullskala skip = modell Eventuelle feilkilder Dette forsøket ble gjennomført to ganger som følge av usannsynlige tall ved forsøk nummer en. I forsøk to fikk vi mer fornuftige tall og valgte å gå for disse. Feil under avlesning på krengevinkel som følge av bølger i tanken. Dette kan medføre at målingene blir unøyaktige. I tillegg til menneskelige feil, som for eksempel unøyaktige målinger av lengden fra snora til linjalen. side 70
71 5.3 Test av fart og akselerasjon Hensikten med dette forsøket er å kartlegge båten sin maksimale akselerasjon og toppfart ved fullt og halvt pådrag Sammendrag av forsøk Forsøket ble gjennomført i slepetanken på maskinlabben og båten ble kjørt via RC. Båten ble lastet opp med vekt som tilsvarer skip med fulle tanker, og en Bluetooth akselerasjonsmåler ble brukt til å logge akselerasjonen via PASCO Capstone. I fartstesten ble det målt opp en strekning på 5m og det ble tatt tiden av det båten brukte på å avlegge strekningen Gjennomføring akselerasjonstest 1. Vi synkroniserte måleinstrumentet med PCen via Capstone og lot båten stå i ro i midten av slepetanken. 2. Begynte å logge og ga full gass med båten. 3. Akselerasjonen kunne leses rett av grafen. 4. Vi kan lese av grafen at båten har en akselerasjon akkurat i pådrags øyeblikket på 1,15 m/s 2 side 71
72 5.3.3 Gjennomføring fartstest 1. En person sto på starten av strekningen mens den andre sto på 5m streken og tok tiden. 2. Båten ble kjørt opp i toppfart før den krysset startstreken, og personen som sto der gav signal til tidtaker når båten krysset. 3. Det ble kjørt 3 forsøk ved fullt pådrag og 3 forsøk på halvt pådrag, for så å ta gjennomsnittet av disse. Tid 1 på 5m Tid 2 på 5m Tid 3 på 5m Gjennomsnitt HALVT PÅDRAG 4,35s 4,48s 4,37s 4,4s FULLT PÅDRAG 3,55s 3,65s 3,71s 3,64s Fart ved fullt pådrag blir farten da: 5/3,64 = 1,37m/s Fart ved halvt pådrag blir farten da: 5/4,4 = 1,13m/s side 72

73 5.4 Hydrostatikk Hensikt Lage et kurveark over egenskapene til skroget, med 0 i trim og fra 0-200% deplasement Utførelse I freeship er den en funksjon som gjør at en kan beregne hydrostatikken til skipet ved ulike deplasement. Skroget har en konstruert dypgang på 2,085m. Det tilsvarer 100% deplasement. Beregningene som er gjort er fra 0m i dypgang til 4.17m side 73
74 Gloseliste Lwl : Length on waterline Bwl : Beam on waterline Volume : Displaced volume Displ. : Displacement LCB VCB Cb Am Cm Aw Cw LCF CP S KMt KMl : Longitudinal center of buoyancy, measured from the aft perpendicular at X=0.0 : Vertical center of buoyancy, measured from the lowest point of the hull : Block coefficient : Midship section area : Midship coefficient : Waterplane area : Waterplane coefficient : Waterplane center of floatation : Prismatic coefficient : Wetted surface area : Transverse metacentric height : Longitudinal metacentric height side 74
75 5.5 Kraftmåling Hensikt Hensikten med dette forsøket er å kartlegge båtens maksimale stillestående trekkraft Sammendrag Forsøket ble gjennomført i slepetanken på maskinlabben og båten ble kjørt via RC. Båten ble lastet opp med vekt som tilsvarer skip med fulle tanker. Det ble brukt en kraftsensoren som logget kraften til båten ved fullt turtall i PASCO Capstone. Det ble gjennomført tre individuelle forsøk. To forsøk i fartsretningen til båten, der polene inn på motoren ble snudd mellom forsøkene. Et forsøk der motoren gikk i revers Gjennomføring kraftmåling 1. Akter festet til båten bel festet til kraftsensoren ved hjelp av en snor. 2. Båten ble kjørt ved fullt Pådrag forover og kraften ble logget av Capstone. 3. Polene inn til motoren i forhold til batteriet ble byttet om og forsøker gjennomført på nytt. 4. Båten ble festet til Kraftsensoren ved fremre feste, og samme forsøk ble gjennomført Resultat Forsøk Forover Forover, med snudde poler Revers Kraft 6.0N 8.4N 5.5N side 75

76 5.6 Strømtrekk og spenning over motor under kjøring Hensikten med dette forsøket er å kartlegge båten sitt strømtrekk og loggføre spenningen over motoren ved halvt og fullt pådrag Sammendrag Forsøket ble gjennomført i slepetanken på maskinlabben og båten ble kjørt via RC. Båten ble lastet opp med vekt som tilsvarer skip med fulle tanker, og en Bluetooth analog omformer som målte spenning ble brukt til å logge resultatene via PASCO Capstone. Under spenningstesten ble det målt spenning direkte over motoren, mens på strømforbrukstesten ble det satt inn en 0,1Ω motstand og målt spenning over denne, for så å regne om til strøm Gjennomføring strømforbrukstest 1. Vi synkroniserte måleinstrumentet med PCen via Capstone og lot båten stå i ro i midten av slepetanken. 2. Begynte å logge og ga full halv gass med båten. 3. Snudde båten og gav full gass tilbake. 4. Spenningen over motstanden tok vi og delte på 0,1 og fikk ut en graf over strømtrekken. Vi kan lese av grafen at båten har et strømtrekk på ca. 7A ved halv gass og ca. 13A ved full gass, hvorfor det er så hakkete på halv gass kommer vi tilbake til i testen hvor vi logger spenningen over motoren. side 76

77 5.6.3 Gjennomføring test av spenning over motor 1. Vi synkroniserte måleinstrumentet med PCen via Capstone og lot båten stå i ro i midten av slepetanken. 2. Begynte å logge og ga full halv gass med båten. 3. Resultatene ble logget og et nytt forsøk ble gjennomført med full gass Halvt pådrag 4. Her ser vi spenningen over motoren ved halvt pådrag, og vi kan se at peakene er ca. 7,5V, som er det samme som batteriet fulladet. Grunnen til at dette er halvt pådrag er fordi den ikke er konstant på 7,5 volt men veksler mellom fullt pådrag og av mange ganger i sekundet. side 77

78 Fullt pådrag 5. Her ser vi spenningen på vei opp og ved fullt pådrag, og den stabiliserer seg på ca. 7V. Grunnen til hakkete strømtrekk ved halvt pådrag i forrige forsøk skyldes kurven til spenningen ved halvt pådrag i denne testen. side 78
79 5.7 Motorens virkningsgrad, dreiemoment, og strømforbruk, ved ulike turtall Hensikt Hensikten med forsøket er å finne virkningsgrad og dreiemomentet til motoren. Samt å finne strømforbruket til motoren ved ulike spenninger Sammendrag Det ble gjorde to Separate forsøk på motoren. Et for å finne virkningsgrad og dreiemoment, og et for å finne strømforbruk ved ulike turtall. I begge forsøkene ble logge programmet PASCO Capstone brukt for å registrere resultatene og motoren fikk spenning fra en variable spenningskilde Det bel og målt strøm og spenning mål ved hjelp av to spenning, en plassert over motoren, og en plassert over en 0.33Ω motstand i serie med motoren. I første forsøk takk motoren en trekloss på 0.1kg opp fra bakken. Det ble brukt posisjonsmål til å logge fart og akselerasjon til treklosse, I det andre forsøket ble det brukt pasco photogate til å registrere omdreiningshastigheten, motoren ble kjørt helt uten last i dette forsøket Gjennomføring Test av Virkningsgrad og Dreiemoment 1. Akslingen til motoren ble festet til klossen ved bruk av et tau. Spenningsmålere ble koblet til motoren. En over motoren, og en over motstanden i serie med motoren. Klossen ble plassert loddrett under akslingen over posisjonsmåleren. 2. Spenning ble satt over motoren som fikk motoren til å dra klossen loddrett oppover. 3. Vi beregnet deretter ut virkningsgrad og dreiemoment, ut i fra resultatene vi fikk. D reiemoment = F * r a, ra = R adius til aksling F = m * a der a = ( a opp + g ) D reiemoment = m * ( a opp + g ) * r a V irkningsgrads = P ut P inn P ut = dreiemoment * f art, P inn = Spenning * Strøm 4. Alle Formler og beregninger ble lagt inn i PASCO Capstone. Vi regner ikke med de side 79

80 første og siste verdiene (Verdiene i grått med strek over). Dei ble målt før motoren begynte å dra og etter den var ferdig, Grafene viser Virkningsgraden og dreiemoment, samt gjennomsnittsverdiene. I tabellen er står det kraftmoment, men dette er det somme som dreiemoment. 5. Dreiemomentet er 2.1*10^-3nm Virkningsgraden er 0.22 side 80
81 5.7.4 Gjennomføring strømforbruk ved ulike turtall 1. Vi koblet opp motoren med spenningsmålere, deretter festet vi en teip på akslingen til motoren. Vi plasserte lysporten slik at teipbiten gikk gjennom lysporten en gang pr. omdreining. 2. Vi kjørte spenning inn på motoren, og lysporten registrerte turtallet. Motoren ble kjørt uten last og det ble brukt en regulerbar spenningskilde til å regulerer spenningen over motoren Resultater side 81
 og design trim.")
82 5.8 Konstruksjonsvannlinjen og trim Hensikt Konstruksjonsvannlinjen og design trim skal bestemmes vha. dataprogrammet og kontrolleres vha. eksperiment i skolens slepetank for den ferdige modellen Sammendrag Vi brukte programmets Freeship til å beregne konstruksjonsvannlinjen(kvl) og design trim. Dette ble gjort ved å beregne vekten til båten og finne det deplasementet den kom til å få, deretter stille vannlinjen i Freeship til vi fikk ønsket deplasement. Vi bestemte oss for et design der vi skulle ha 0-trim Bilde fra Freeship KVL=2.085m Gjennomføring Først beregnet vi vekten på modellen kom til å veie. Modellen, fullastet, med droner, tanker og div utstyr, kom til å veie 8.32kg. 8.32kg * 243 * 0.998/1.025 = 1.12 * kg = 112 tonn Vi beregnet at deplasementet til en fullastet båt kom til å være 112 tonn, og at design dypgangen da ble 1.82m Vi regnet dette om til skalert størrelse. 1.82m/24 * 1.025/0.998 = m = 7.7cm Vannlinjen ble cm over kjølen på modellen. Da konstruksjonen er beregnet for 0-trim var det lett og måle opp og male på vannlinjen på modellen. side 82


83 5.8.5 Bilder av første vannlinje test Etter at vi testet modellen i vannet viste det seg at den fullastede modellen hadde slagside mot babord. Løsningen på dette som beskrevet tidligere, var å redusere vekten på drone hangaren og plassere to bly plater i bunn av båten, på totalt 2.26kg. Den nye totalvekten på modellen ble 10.68kg Vi måtte da begrene ny konstruksjonsvannlinje da den nye vekten førte til et nytt deplasement og ny dypgang. Det nye deplasementet ble 143. tonn og kvl ble 2.10m 10.68kg * * 0.998/1.025 = * kg = tonn /24 * = 0.089m = 8.89cm Vi oppdaget og at vi hadde fått litt fått ca 1 cm trim i båten, noe som gjorde at vi måtte heve kvl mere bak enn foran. side 83
84 6. Serieproduksjon 6.1 Muligheter Grunnet fartøyets modulære design vil det være mulig i serieprodusere deler for å så sette de sammen. Ideelt sett så ser vi at produksjon vil bli automatisert og på norsk jord. Dette har vært ett av våre grunnprinsipper ifra bedriften ble stiftet tidligere i år. Dersom prisen tvinger oss kan vi bli nødt til å iverksette produksjon i et land med billigere arbeidskraft. En stor fordel ved produksjon i Norge vil være den billige strømmen. I tillegg vil det være tryggere for rikets sikkerhet å skape våre militære verdier under vår fulle kontroll. 6.3 Utfordringer En utfordring ved serieproduksjon vil være delenes høye krav til presisjon, men vi ser for oss at dette vil kunne la seg løse med automasjon og kunstig intelligens. 6.4 Fordeler Den største fordelen med serieproduksjon vil være reduserte kostnader noe som vil kunne gi oss en større flåte med disse fartøyene som videre vil øke norges kampkraft. Dersom vi presterer å gjøre denne prosessen effektiv vil vi kunne supplere våre allierte med slike sjøgående droneplattformer. Norge kan bli en eksportør av militært materiell. 6.5 Kostnader Vi i Wave har troen på at vårt produkt er konkurransedyktig, selv i en sterkt voksende industri som dronefartøyer. På grunn av produktets smarte løsninger og ferdige plantegninger vil vi kunne raskt få våre farkoster på vannet. Vi er iferd med å bli ledende aktør innen sjøgående droneplatformer og dette gjør oss til en attraktiv samarbeidspartner for eksterne bedrifter. Vi vil kunne få eksklusive avtaler som gjenspeiler seg i vår pris. side 84

85 Her er en oversikt over hva det første fartøyet vi vil kunne levere av denne typen kommer til å koste. Med i denne prisen ligger alt av design og utvikling av teknologien som ligger i KNM Tsunami. Når dette er sagt kommer eventuelle videre fartøy til å bli en signifikant del rimeligere. side 85
Torstein, Rasmus, Johan, Sigve, Karl Martin, Joakim 26. juni 2015. Creative Undersea & Naval Technology PROSJEKT: HUGIN & MUNIN
 Torstein, Rasmus, Johan, Sigve, Karl Martin, Joakim 26. juni 2015 Creative Undersea & Naval Technology PROSJEKT: HUGIN & MUNIN Innholdsfortegnelse 1 Sammendrag... 3 2 Kravdokumentet... 4 2.1 Stabskrav
Torstein, Rasmus, Johan, Sigve, Karl Martin, Joakim 26. juni 2015 Creative Undersea & Naval Technology PROSJEKT: HUGIN & MUNIN Innholdsfortegnelse 1 Sammendrag... 3 2 Kravdokumentet... 4 2.1 Stabskrav
MONTERINGS- OG BRUKSANVISNING FOR GARASJEPORTÅPNER
 MONTERINGS- OG BRUKSANVISNING FOR GARASJEPORTÅPNER Vennligst les denne manualen nøye før du installerer Innhold A. Deleliste.. 2 B. Funksjoner.. 3 C. Montering.. 4 D. Fjernkontroll og design.. 7 E. Programmering..
MONTERINGS- OG BRUKSANVISNING FOR GARASJEPORTÅPNER Vennligst les denne manualen nøye før du installerer Innhold A. Deleliste.. 2 B. Funksjoner.. 3 C. Montering.. 4 D. Fjernkontroll og design.. 7 E. Programmering..
Dorma Håndseder BRC-H
 Brukerveiledning, vedlikeholdsog monteringsanvisning Dorma Håndseder BRC-H Håndsender BRC-H Art.nr.: 2200015 Innholdsfortegnelse 1 Info om informasjonen i denne veiledningen 3 2 Fare 3 3 Dette kan senderen
Brukerveiledning, vedlikeholdsog monteringsanvisning Dorma Håndseder BRC-H Håndsender BRC-H Art.nr.: 2200015 Innholdsfortegnelse 1 Info om informasjonen i denne veiledningen 3 2 Fare 3 3 Dette kan senderen
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246
 ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på:
 Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Gruppen begynte å diskutere hva slags prosjekt man ville jobbe med, alternativene falt på: Model båt, Kaffemaskin automatisert, Drone, Robot, Robot støvsuger, Robot luftflukter og Helikopter. Kriteriene
Svingermontering. Montering av svingeren
 Svingermontering Dette dokumentet dekker installasjonen av alle 83/200kHz, 50/200kHz og HDI/Downscansvingere som benytter akterspeil/hekk for montering. Innvendig liming i skrog kan benyttes, men ikke
Svingermontering Dette dokumentet dekker installasjonen av alle 83/200kHz, 50/200kHz og HDI/Downscansvingere som benytter akterspeil/hekk for montering. Innvendig liming i skrog kan benyttes, men ikke
Kort norsk manual Hvordan komme i gang:
 Kort norsk manual Hvordan komme i gang: Det første du må gjøre er å laste inn et skip i programmet. Det gjør du ved å velge Open under File -menyen. Fra underkatalogen Ships Database velger du et skip,
Kort norsk manual Hvordan komme i gang: Det første du må gjøre er å laste inn et skip i programmet. Det gjør du ved å velge Open under File -menyen. Fra underkatalogen Ships Database velger du et skip,
Trinn 1: Lokaliser de nødvendige kablene på motoren.
 Gratulere med ny turtallsperre. Monteringen består av fire trinn. Det er viktig at du leser gjennom hele denne bruksanvisningen før du starter monteringen av turtallsperren. Det anbefales å gjennomgå alle
Gratulere med ny turtallsperre. Monteringen består av fire trinn. Det er viktig at du leser gjennom hele denne bruksanvisningen før du starter monteringen av turtallsperren. Det anbefales å gjennomgå alle
Radiostyrt oppladbar monstertruck med firehjulstrekk Ferdig montert og malt
 Radiostyrt oppladbar monstertruck med firehjulstrekk Ferdig montert og malt Les bruksanvisningen før du begynner å bruke produktet. Viktig informasjon - Følg alltid bruksanvisningen til produktet. - Slå
Radiostyrt oppladbar monstertruck med firehjulstrekk Ferdig montert og malt Les bruksanvisningen før du begynner å bruke produktet. Viktig informasjon - Følg alltid bruksanvisningen til produktet. - Slå
BORD SAG 200mm 600W BRUKSANVISNING. Home Design AS erklærer herved at følgende produkter er i samsvar med gjeldende direktiver: Produkt: Bordsag, 600W
 BORD SAG 200mm 600W Home Design AS erklærer herved at følgende produkter er i samsvar med gjeldende direktiver: BRUKSANVISNING Produkt: Bordsag, 600W Produktbetegnelse: Direktiver: Normer: Sted og dato:
BORD SAG 200mm 600W Home Design AS erklærer herved at følgende produkter er i samsvar med gjeldende direktiver: BRUKSANVISNING Produkt: Bordsag, 600W Produktbetegnelse: Direktiver: Normer: Sted og dato:
STERING POWER MANUAL STEERING POWER STEMER FRA MONTERINGS OG BRUKER VEILEDNING
 STEERING POWER HYDRAULISKE STYRESYSTEMER STEMER FRA MONTERINGS OG BRUKER VEILEDNING 1 MONTERING AV SYLINDER. For ror: Sylinderen skal monteres på en sterk og stabil flate, på skroget eller en brakett som
STEERING POWER HYDRAULISKE STYRESYSTEMER STEMER FRA MONTERINGS OG BRUKER VEILEDNING 1 MONTERING AV SYLINDER. For ror: Sylinderen skal monteres på en sterk og stabil flate, på skroget eller en brakett som
Innholdsfortegnelse. 3. Formål med oppgaven og Om meg Utstyr og fremgangsmåte, ideen Resultater. 10. Oppsummering og konklusjon.
 1 Innholdsfortegnelse 3. Formål med oppgaven og Om meg. 4-6. Utstyr og fremgangsmåte, ideen. 7-9. Resultater 10. Oppsummering og konklusjon. 2 Formål med oppgaven. Formålet med oppgaven er å gjøre ett
1 Innholdsfortegnelse 3. Formål med oppgaven og Om meg. 4-6. Utstyr og fremgangsmåte, ideen. 7-9. Resultater 10. Oppsummering og konklusjon. 2 Formål med oppgaven. Formålet med oppgaven er å gjøre ett
BRUKERMANUAL. Trådløs fjernkontroll til MINI 100/101 MIDI 200/201 MAXI SERIEN
 BRUKERMANUAL Trådløs fjernkontroll til MINI 100/101 MIDI 200/201 MAXI SERIEN Art. nr. 17-00040 Fra serienummer 500 - Rev.3-21.08.08 INNHOLDSFORTEGNELSE TRÅDLØS FJERNKONTROLL 3 Etter montasje 3 Koding av
BRUKERMANUAL Trådløs fjernkontroll til MINI 100/101 MIDI 200/201 MAXI SERIEN Art. nr. 17-00040 Fra serienummer 500 - Rev.3-21.08.08 INNHOLDSFORTEGNELSE TRÅDLØS FJERNKONTROLL 3 Etter montasje 3 Koding av
DNG C-2000h. Juksamaskinen for fritidsfiskere BRUKERMANUAL
 DNG C-2000h Juksamaskinen for fritidsfiskere BRUKERMANUAL Egenskaper: Tar liten plass og er lett i vekt. Lavt strømforbruk tross stor trekk kraft. Brukervennlig, robust og driftsikker. Tre funksjoner i
DNG C-2000h Juksamaskinen for fritidsfiskere BRUKERMANUAL Egenskaper: Tar liten plass og er lett i vekt. Lavt strømforbruk tross stor trekk kraft. Brukervennlig, robust og driftsikker. Tre funksjoner i
WORKSHOP BRUK AV SENSORTEKNOLOGI
 WORKSHOP BRUK AV SENSORTEKNOLOGI MIKROKONTROLLERE - ARDUINO KURS 27.08.16 ANALOG - DIGITAL FRA VARIASJONER AV STRØMSTYRKE TIL TALL ARDUINO BRUKES TIL Å UTFØRE SLIK KONVERTERING STRØM/TALL ELLER TALL/STRØM
WORKSHOP BRUK AV SENSORTEKNOLOGI MIKROKONTROLLERE - ARDUINO KURS 27.08.16 ANALOG - DIGITAL FRA VARIASJONER AV STRØMSTYRKE TIL TALL ARDUINO BRUKES TIL Å UTFØRE SLIK KONVERTERING STRØM/TALL ELLER TALL/STRØM
Turny bladvender Brukerveiledning
 Turny bladvender Brukerveiledning Generelt om Turny elektronisk bladvender...2 Tilkobling av Turny...2 Installasjon...3 Montering av bok/tidsskrift...4 Bruk av Turny...4 Aktiviser vippefunksjonen...5 Mulige
Turny bladvender Brukerveiledning Generelt om Turny elektronisk bladvender...2 Tilkobling av Turny...2 Installasjon...3 Montering av bok/tidsskrift...4 Bruk av Turny...4 Aktiviser vippefunksjonen...5 Mulige
1 Innledning. 2 Virkemåte for kortet. Bli kjent med USB I/O kort K8055. NB! Ta med multimeter og lite skrujern!
 D:\Per\Fag\Styresys\Oppgavebok\K8055LV_12\Øving 1\K8055_LV2012_SANN1_2014.wpd Fag SO507E Styresystemer HIST-AFT jan 14 PHv Dataøving 1 SANNTID MED LABVIEW Bli kjent med USB I/O kort K8055. NB! Ta med multimeter
D:\Per\Fag\Styresys\Oppgavebok\K8055LV_12\Øving 1\K8055_LV2012_SANN1_2014.wpd Fag SO507E Styresystemer HIST-AFT jan 14 PHv Dataøving 1 SANNTID MED LABVIEW Bli kjent med USB I/O kort K8055. NB! Ta med multimeter
MONTERINGSANVISNING FOR HANDI-LIFT ML7
 MONTERINGSANVISNING FOR HANDI-LIFT ML7 Innholdsfortegnelse 1 Introduksjon... 3 1.1 Sjekk delene og tegningen... 3 1.2 Elektrisk installasjon... 3 2 Kraftpåvirkning på bygningen... 4 3 Installasjon av tårnet...
MONTERINGSANVISNING FOR HANDI-LIFT ML7 Innholdsfortegnelse 1 Introduksjon... 3 1.1 Sjekk delene og tegningen... 3 1.2 Elektrisk installasjon... 3 2 Kraftpåvirkning på bygningen... 4 3 Installasjon av tårnet...
Bruksanvisning. Talepåminner med mikrofon, tidsstyring og batteridrift. Dørtaler VARENR.: Dok. nr.: 2226 A
 HMS art.nr. 215433 FlexiLife Bruksanvisning Talepåminner med mikrofon, tidsstyring og batteridrift. Dørtaler VARENR.: 1486 Dok. nr.: 2226 A1 2016.03.30 Vestfold Audio Sandefjord HMS art.nr. 215433 FlexiLife
HMS art.nr. 215433 FlexiLife Bruksanvisning Talepåminner med mikrofon, tidsstyring og batteridrift. Dørtaler VARENR.: 1486 Dok. nr.: 2226 A1 2016.03.30 Vestfold Audio Sandefjord HMS art.nr. 215433 FlexiLife
MONTERINGSANVISNING TERMLIFT
 MONTERINGSANVISNING TERMLIFT MONTERINGSANVISNING Før du setter i gang. For montering, bruk og vedlikehold av denne motoren pakken på en sikker måte, er det flere forutsetninger som må tas. For sikkerheten
MONTERINGSANVISNING TERMLIFT MONTERINGSANVISNING Før du setter i gang. For montering, bruk og vedlikehold av denne motoren pakken på en sikker måte, er det flere forutsetninger som må tas. For sikkerheten
Gratulerer med en skikkelig kvalitetspostkasse!
 Trofast Parcel Advance: Formfin Advance: Gratulerer med en skikkelig kvalitetspostkasse! Før du tar postkassen i bruk, vil vi gjerne be deg lese brukerveiledningen. Leveransen inneholder: - En postkasse
Trofast Parcel Advance: Formfin Advance: Gratulerer med en skikkelig kvalitetspostkasse! Før du tar postkassen i bruk, vil vi gjerne be deg lese brukerveiledningen. Leveransen inneholder: - En postkasse
Bruksanvisning for Master Swing TM - personlig driving range for alle golfentusiaster!
 Bruksanvisning for Master Swing TM - personlig driving range for alle golfentusiaster! Merknad: Denne oversettelsen inneholder ikke illustrasjoner. Se på illustrasjonene i den engelske bruksanvisningen
Bruksanvisning for Master Swing TM - personlig driving range for alle golfentusiaster! Merknad: Denne oversettelsen inneholder ikke illustrasjoner. Se på illustrasjonene i den engelske bruksanvisningen
Baby Treng reiseseng. Bruksanvisning
 Baby Treng reiseseng Bruksanvisning Les denne bruksanvisningen nøye før bruk. Advarsel: Dersom du ikke følger instruksjonene i bruksanvisningen, kan det føre til skader og mulig kvelning. Bruk aldri ekstra
Baby Treng reiseseng Bruksanvisning Les denne bruksanvisningen nøye før bruk. Advarsel: Dersom du ikke følger instruksjonene i bruksanvisningen, kan det føre til skader og mulig kvelning. Bruk aldri ekstra
BRUKSANVISNING OG MONTERING
 GARASJEPORTÅPNER 6710310200 BRUKSANVISNING OG MONTERING BRUKSANVISNING I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde 1 Skiftenøkkel/fastnøkler
GARASJEPORTÅPNER 6710310200 BRUKSANVISNING OG MONTERING BRUKSANVISNING I: Forberedelse Pakk ut åpneren. Kontroller at alle delene er på plass. II: Verktøy du trenger. Se på bilde 1 Skiftenøkkel/fastnøkler
EGM-100A SERVOMOTOR. Vær oppmerksom!
 BLÅ EGM-100A SERVOMOTOR Vær oppmerksom! Spjeldmotoren EGM-100A MÅ ALDRI ÅPNES OPP. Skjønt at det er mulig å justere grensebryterne til EGM-100A på fremsiden, er det ikke tillatt å prøve å reparere justeringsknappen
BLÅ EGM-100A SERVOMOTOR Vær oppmerksom! Spjeldmotoren EGM-100A MÅ ALDRI ÅPNES OPP. Skjønt at det er mulig å justere grensebryterne til EGM-100A på fremsiden, er det ikke tillatt å prøve å reparere justeringsknappen
MAKEADRONE MIKRO MED WIFI-KAMERA. Byggeveiledning for mikro-quadkopter.
 MAKEADRONE MIKRO yggeveiledning for mikro-quadkopter www.makeadrone.net MED WIFI-KAMERA Gratulerer med ditt nye dronekit fra Makeadrone! Lekedronen som kan repareres. Makeadrone Mikro er designet og produsert
MAKEADRONE MIKRO yggeveiledning for mikro-quadkopter www.makeadrone.net MED WIFI-KAMERA Gratulerer med ditt nye dronekit fra Makeadrone! Lekedronen som kan repareres. Makeadrone Mikro er designet og produsert
TRÅDLØS FJERNSTART for Honda EU70is BRUKERMANUAL MONTERINGSANVISNING
 TRÅDLØS FJERNSTART for Honda EU70is BRUKERMANUAL MONTERINGSANVISNING Kjære Kunde, Takk for at du valgte å investere i trådløst fjernstart-kit som tilleggsutstyr for ditt Honda EU70is aggregat. Vi håper
TRÅDLØS FJERNSTART for Honda EU70is BRUKERMANUAL MONTERINGSANVISNING Kjære Kunde, Takk for at du valgte å investere i trådløst fjernstart-kit som tilleggsutstyr for ditt Honda EU70is aggregat. Vi håper
Spjeldmotor EGM-100A. For wiretrekk. Nominell trekkraft. Ekstern styrestrømssikring Maks. vandring av trommel. Inngangsmotstand
 Spjeldmotor EGM-100A For wiretrekk Teknisk spesifikasjoner Nominell spenning Maks. effektforbruk Vekt Nominell trekkraft Maks. trekkraft Ekstern styrestrømssikring Min. vandring av trommel Maks. vandring
Spjeldmotor EGM-100A For wiretrekk Teknisk spesifikasjoner Nominell spenning Maks. effektforbruk Vekt Nominell trekkraft Maks. trekkraft Ekstern styrestrømssikring Min. vandring av trommel Maks. vandring
Varslingshjelpemidler. S1043BC Companion mini med personsøker. Bruks- og Monteringsanvisning
 Varslingshjelpemidler S1043BC Companion mini med personsøker Bruks- og Monteringsanvisning Gjerstadveien 398, Brokelandsheia, 4993 Sundebru, Tlf + 47 37119950 E-mail: post@picomed.no Foretaksnummer 962
Varslingshjelpemidler S1043BC Companion mini med personsøker Bruks- og Monteringsanvisning Gjerstadveien 398, Brokelandsheia, 4993 Sundebru, Tlf + 47 37119950 E-mail: post@picomed.no Foretaksnummer 962
Håndbok for Birdie1 Lithium-Ion Golftralle
 Håndbok for Birdie1 Lithium-Ion Golftralle 2 Innhold: 1. Beskrivelse, deleliste 2. Monteringsanvisning 3. Drift og vedlikehold 4. Bruksanvisning for Lithium-Ion batteriet 5. Servicetilbud Beskrivelse,
Håndbok for Birdie1 Lithium-Ion Golftralle 2 Innhold: 1. Beskrivelse, deleliste 2. Monteringsanvisning 3. Drift og vedlikehold 4. Bruksanvisning for Lithium-Ion batteriet 5. Servicetilbud Beskrivelse,
Sjekkliste FØR feilrapportering
 v3.5 Sjekkliste FØR feilrapportering Skal være gjennomgått før support eller vakt telefon kontaktes. 1. Start radioboks, router/brannvegg og datamaskin på nytt Koble fra strømadapteret til antennen ute
v3.5 Sjekkliste FØR feilrapportering Skal være gjennomgått før support eller vakt telefon kontaktes. 1. Start radioboks, router/brannvegg og datamaskin på nytt Koble fra strømadapteret til antennen ute
Falck 6709 Armbåndssender
 Brukerveiledning Falck 6709 Armbåndssender Varenr: 320 066 Innholdsfortegnelse Innholdsfortegnelse... 2 Beskrivelse av Falck 6709 Klokke sender... 2 Levering... 3 Koding til varsler... 3 Slette koder:...
Brukerveiledning Falck 6709 Armbåndssender Varenr: 320 066 Innholdsfortegnelse Innholdsfortegnelse... 2 Beskrivelse av Falck 6709 Klokke sender... 2 Levering... 3 Koding til varsler... 3 Slette koder:...
Koding RK-SENDER 4 funksjon 18-320-00
 Koding RK-SENDER 4 funksjon 18-320-00 Innvendig i senderen: Innstilling av anleggskode: Anleggskode stilles inn på bryter 3 8 på den 8 polete bryteren. Skal stilles likt i sender og mottaker. Ved innstilling
Koding RK-SENDER 4 funksjon 18-320-00 Innvendig i senderen: Innstilling av anleggskode: Anleggskode stilles inn på bryter 3 8 på den 8 polete bryteren. Skal stilles likt i sender og mottaker. Ved innstilling
Hobbyking Multi-Remote Switch (MRS) Hvordan sette opp og bruke Multi-Remote Switch (MRS)
 Hvordan sette opp og bruke Multi-Remote Switch (MRS)") Hobbyking Multi-Remote Switch (MRS) Multi-Remote Switch er essensielt for alle R / C-modeller, bil / båt / helikopter eller fly. Du skal ikke bekymre deg hvis du ikke har en profesjonell sender for å styre
Hobbyking Multi-Remote Switch (MRS) Multi-Remote Switch er essensielt for alle R / C-modeller, bil / båt / helikopter eller fly. Du skal ikke bekymre deg hvis du ikke har en profesjonell sender for å styre
Danalock V3 SCANDI Monteringsanvisning.
 Danalock V3 SCANDI Monteringsanvisning www.danalock.com Innholdsfortegnelse Nødvendig verktøy side 4 Inkluderte deler side 5 1. Sikre utvendig lås side 6 2. Fjerne låsvrider på innsiden side 7 3. Normal
Danalock V3 SCANDI Monteringsanvisning www.danalock.com Innholdsfortegnelse Nødvendig verktøy side 4 Inkluderte deler side 5 1. Sikre utvendig lås side 6 2. Fjerne låsvrider på innsiden side 7 3. Normal
Fornybar energi. Komme i gang med LEGO Energimåler
 Fornybar energi Komme i gang med LEGO Energimåler de LEGO Group. 2010 LEGO Gruppen. 1 Innholdsfortegnelse 1. Oversikt over Energimåleren... 3 2. Feste Energiboksen... 3 3. Lade og utlade Energimåleren...
Fornybar energi Komme i gang med LEGO Energimåler de LEGO Group. 2010 LEGO Gruppen. 1 Innholdsfortegnelse 1. Oversikt over Energimåleren... 3 2. Feste Energiboksen... 3 3. Lade og utlade Energimåleren...
Foreliggende oppfinnelse vedrører en pumpetank for leveranse av sjøvann til utstyr på skip og flytende installasjoner
 1 Oppfinnelsens område Foreliggende oppfinnelse vedrører en pumpetank for leveranse av sjøvann til utstyr på skip og flytende installasjoner Bakgrunn For å få vann til marint maskineri og prosessutstyr
1 Oppfinnelsens område Foreliggende oppfinnelse vedrører en pumpetank for leveranse av sjøvann til utstyr på skip og flytende installasjoner Bakgrunn For å få vann til marint maskineri og prosessutstyr
Omgivelseskontroll Dokumentasjon for SR2 IR og bryter styrt 230 VAC bryter
 Omgivelseskontroll Dokumentasjon for SR2 IR og bryter styrt 230 VAC bryter Brokelandsheia, 4993 Sundebru, Tlf + 47 37119950 Fax + 47 37119951 E-mail: firmapost@picomed.no Foretaksnummer 962 211 631 MVA
Omgivelseskontroll Dokumentasjon for SR2 IR og bryter styrt 230 VAC bryter Brokelandsheia, 4993 Sundebru, Tlf + 47 37119950 Fax + 47 37119951 E-mail: firmapost@picomed.no Foretaksnummer 962 211 631 MVA
Mars Robotene (5. 7. trinn)
") Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Mars Robotene (5. 7. trinn) Lærerveiledning Informasjon om skoleprogrammet Gjennom dette skoleprogrammet skal elevene oppleve og trene seg på et teknologi og design prosjekt, samt få erfaring med datainnsamling.
Monteringsveiledning Interaktiv tavle fra Trimax
 Monteringsveiledning Interaktiv tavle fra Trimax FUNKSJONSBESKRIVELSE... 2 FORBEREDELSER... 2 PLASSERING AV TAVLEN... 2 PLASSERING AV PROJEKTOR... 3 PLASSERING AV PC... 3 PLASSERING AV LADESTASJON FOR
Monteringsveiledning Interaktiv tavle fra Trimax FUNKSJONSBESKRIVELSE... 2 FORBEREDELSER... 2 PLASSERING AV TAVLEN... 2 PLASSERING AV PROJEKTOR... 3 PLASSERING AV PC... 3 PLASSERING AV LADESTASJON FOR
INNHOLDSFORTEGNELSE.
 INNHOLDSFORTEGNELSE. 1. Beskrivelse av betjeningspanel.... 2 1.1 Funksjoner... 2 1.2 Beskrivelse av funksjoner... 2 1.3 Betjenings funksjons parametere.... 5 1.3.2 Sagblad hastighet....5 1.3.3 Kjølevæske
INNHOLDSFORTEGNELSE. 1. Beskrivelse av betjeningspanel.... 2 1.1 Funksjoner... 2 1.2 Beskrivelse av funksjoner... 2 1.3 Betjenings funksjons parametere.... 5 1.3.2 Sagblad hastighet....5 1.3.3 Kjølevæske
muncw 2.1.2 Svingskive enereit 2.1.3 Svingskive segment
 muncw 2.1.2 Svingskive enereit Svingskiven består av 32 segmenter som er lenket i sammen. Hver fjerde vogn har drift som driver skiven rundt. Hvert segment har 4 hjul. Svingskivens indre diameter er 15
muncw 2.1.2 Svingskive enereit Svingskiven består av 32 segmenter som er lenket i sammen. Hver fjerde vogn har drift som driver skiven rundt. Hvert segment har 4 hjul. Svingskivens indre diameter er 15
Trinn 1: Lokaliser de nødvendige kablene på motoren.
 Gratulere med ny turtallsperre. Monteringen består av tre trinn. Det er viktig at du leser gjennom hele denne bruksanvisningen før du starter monteringen av turtallsperren. Det anbefales å gjennomgå alle
Gratulere med ny turtallsperre. Monteringen består av tre trinn. Det er viktig at du leser gjennom hele denne bruksanvisningen før du starter monteringen av turtallsperren. Det anbefales å gjennomgå alle
Brukermanual / monteringsanvisning
 Brukermanual / monteringsanvisning Brukermanual 1 2 4 3 Oversikt 1. Kontrollenhet. Monteres på vegg og kobles sammen med ventilen. NB: Denne montasjen anbefales utført av montør. Ventilens ledningspakke
Brukermanual / monteringsanvisning Brukermanual 1 2 4 3 Oversikt 1. Kontrollenhet. Monteres på vegg og kobles sammen med ventilen. NB: Denne montasjen anbefales utført av montør. Ventilens ledningspakke
Analog til digital omformer
 A/D-omformer Julian Tobias Venstad ED-0 Analog til digital omformer (Engelsk: Analog to Digital Converter, ADC) Forside En rask innføring. Innholdsfortegnelse Forside 1 Innholdsfortegnelse 2 1. Introduksjon
A/D-omformer Julian Tobias Venstad ED-0 Analog til digital omformer (Engelsk: Analog to Digital Converter, ADC) Forside En rask innføring. Innholdsfortegnelse Forside 1 Innholdsfortegnelse 2 1. Introduksjon
Enheten må ikke installeres av kunden selv. (Vi kan i så fall ikke garantere for sikkerhet og yteevne.)
") LOSSNAY TIL HJEMMEBRUK TYPE VL-100U-E BRUKSANVISNING (Til kunden) Før denne Lossnay-ventilatoren tas i bruk, må bruksanvisningen leses. Oppbevar deretter bruksanvisningen på et sted hvor den er lett å
LOSSNAY TIL HJEMMEBRUK TYPE VL-100U-E BRUKSANVISNING (Til kunden) Før denne Lossnay-ventilatoren tas i bruk, må bruksanvisningen leses. Oppbevar deretter bruksanvisningen på et sted hvor den er lett å
Omgivelseskontroll. Dokumentasjon for Picomatic DA300 døråpner
 Omgivelseskontroll Dokumentasjon for Picomatic DA300 døråpner Brokelandsheia, 4993 Sundebru, Tlf +47 3711 9950 Fax +47 3711 9951 E-mail: firmapost@picomed.no Foretaksnr 962 211 631 MVA Revisjonsoversikt
Omgivelseskontroll Dokumentasjon for Picomatic DA300 døråpner Brokelandsheia, 4993 Sundebru, Tlf +47 3711 9950 Fax +47 3711 9951 E-mail: firmapost@picomed.no Foretaksnr 962 211 631 MVA Revisjonsoversikt
Mobiltelefonsender MOBIL10
 Mobiltelefonsender MOBIL10 Varenr. 1512 HMS-nr.: 233427 Brukerhåndbok Dok. nr.: 2299A3 Dato: 2018.04.11 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme
Mobiltelefonsender MOBIL10 Varenr. 1512 HMS-nr.: 233427 Brukerhåndbok Dok. nr.: 2299A3 Dato: 2018.04.11 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme
Oppgave 1.1 Kjør rett fram Programmere roboten til å kjøre rett fram ved å bruke begge motorer. Deretter rygge tilbake.
 Lego Mindstorms EV3 Del 1 Generell programmering med blokker for å kjøre rett fram og svinge, samt bruk av løkker for å gjenta en bevegelse. Roboten skal være satt opp med standardoppsett. Oppgave 1.1
Lego Mindstorms EV3 Del 1 Generell programmering med blokker for å kjøre rett fram og svinge, samt bruk av løkker for å gjenta en bevegelse. Roboten skal være satt opp med standardoppsett. Oppgave 1.1
Trinnvise anvisninger Bygge et trehus
 Trinnvise anvisninger Bygge et trehus Velg tre Velg et tre med den rette strukturen, og pass på at treet du velger, er sunt dette er avgjørende for at du skal få en solid, sterk trehuskonstruksjon. Tresorter
Trinnvise anvisninger Bygge et trehus Velg tre Velg et tre med den rette strukturen, og pass på at treet du velger, er sunt dette er avgjørende for at du skal få en solid, sterk trehuskonstruksjon. Tresorter
Sjekkliste FØR feilrapportering
 v3.4 Sjekkliste FØR feilrapportering 1. Start radioboks, router/brannvegg og datamaskin på nytt Koble fra strømadapteret til antennen ute på veggen og til evtuelle router/brannvegg. Vent 30 sekund før
v3.4 Sjekkliste FØR feilrapportering 1. Start radioboks, router/brannvegg og datamaskin på nytt Koble fra strømadapteret til antennen ute på veggen og til evtuelle router/brannvegg. Vent 30 sekund før
Brukerveiledning Rev. 3, 22.10.2008
 Brukerveiledning Rev. 3, 22.10.2008 Rev 3, 221008 Side 1 INNHOLDSFORTEGNELSE: UTPAKKING OG MONTERING 3 ELEKTRISK TILKOBLING 3 OPPSTART 4 JUSTERING AV SLAGLENGDE (OPSJON) 5 DAGLIG DRIFT 6 START OG BRUK
Brukerveiledning Rev. 3, 22.10.2008 Rev 3, 221008 Side 1 INNHOLDSFORTEGNELSE: UTPAKKING OG MONTERING 3 ELEKTRISK TILKOBLING 3 OPPSTART 4 JUSTERING AV SLAGLENGDE (OPSJON) 5 DAGLIG DRIFT 6 START OG BRUK
Mobiltelefonsender MOBIL10
 Mobiltelefonsender MOBIL10 Varenr. 1512 HMS-nr.: 233427 Brukerhåndbok Dok. nr.: 2299A2 Dato: 2017.05.15 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme
Mobiltelefonsender MOBIL10 Varenr. 1512 HMS-nr.: 233427 Brukerhåndbok Dok. nr.: 2299A2 Dato: 2017.05.15 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme
Liberty Hanging Heater
 Liberty Hanging Heater Art. Nr. 305040 Brukermanual Pakk opp terrassevarmeren og sjekk at alle delene er der, og at ingenting ligger igjen i esken. Pass også på at all emballasje er fjernet. Bruk den detaljerte
Liberty Hanging Heater Art. Nr. 305040 Brukermanual Pakk opp terrassevarmeren og sjekk at alle delene er der, og at ingenting ligger igjen i esken. Pass også på at all emballasje er fjernet. Bruk den detaljerte
INF1510 Oblig #1. Kjetil Heen, februar 2016
 INF1510 Oblig #1 Kjetil Heen, februar 2016 1 2 Etch-a-sketch Det ferdige sluttproduktet skal simulere en klassisk leke, Etch-a-sketch, et tegnebrett, hvor man tegner på en flate ved å skru på 2 hjul, og
INF1510 Oblig #1 Kjetil Heen, februar 2016 1 2 Etch-a-sketch Det ferdige sluttproduktet skal simulere en klassisk leke, Etch-a-sketch, et tegnebrett, hvor man tegner på en flate ved å skru på 2 hjul, og
Holderfestet Nokia HH-20 og CR-122
 Holderfestet Nokia HH-20 og CR-122 B 1 D C E A 2.0. utgave A C D 2 F E G B 4 4 3 3 5 7 8 6 2010 Nokia. Alle rettigheter forbeholdt. Nokia, Nokia Connecting People og Nokia Original Accessories-logoen er
Holderfestet Nokia HH-20 og CR-122 B 1 D C E A 2.0. utgave A C D 2 F E G B 4 4 3 3 5 7 8 6 2010 Nokia. Alle rettigheter forbeholdt. Nokia, Nokia Connecting People og Nokia Original Accessories-logoen er
MONTERINGSANVISNINGER FIBREROLL-BRANNGARDINER
 KLARINGSHØYDE FOR ÅPNING (H) MONTERINGSANVISNINGER FIBREROLL-BRANNGARDINER Utformingen av styreskinnene består av tre deler og er den samme for både frontmonterte og mellommonterte bruksområder. (Se detaljtegning
KLARINGSHØYDE FOR ÅPNING (H) MONTERINGSANVISNINGER FIBREROLL-BRANNGARDINER Utformingen av styreskinnene består av tre deler og er den samme for både frontmonterte og mellommonterte bruksområder. (Se detaljtegning
KALIBRERINGENS ABC. Riktig kalibrering en forutsetning for riktig vurdering!
 KALIBRERINGENS ABC Riktig kalibrering en forutsetning for riktig vurdering! Vi får stadig henvendelser fra kunder som synes at kalibreringen av mikrofonen ved bruk av Logos, er vanskelig. Det hender at
KALIBRERINGENS ABC Riktig kalibrering en forutsetning for riktig vurdering! Vi får stadig henvendelser fra kunder som synes at kalibreringen av mikrofonen ved bruk av Logos, er vanskelig. Det hender at
super:bit-oppdraget Lærerveiledning Versjon 1, august 19.
 super:bit-oppdraget Lærerveiledning Versjon 1, august 19. Innhold 1 Oppvarming analog programmering (10 minutter)... 3 2 Kom i gang med micro:bit (15 minutter)... 5 3 Kjør en meter med BitBot... 6 4 Kjør
super:bit-oppdraget Lærerveiledning Versjon 1, august 19. Innhold 1 Oppvarming analog programmering (10 minutter)... 3 2 Kom i gang med micro:bit (15 minutter)... 5 3 Kjør en meter med BitBot... 6 4 Kjør
Kompakt ZIP Screen med Serge 2165 diagonalvevd glassfiberduk og Somfy motor/automatikk.
 SolidScreen 125 Kompakt ZIP Screen med Serge 2165 diagonalvevd glassfiberduk og Somfy motor/automatikk. SolidScreen 125 kan styres med fjernkontroll RTS (enveis kommunikasjon) eller IO (toveis). Begge
SolidScreen 125 Kompakt ZIP Screen med Serge 2165 diagonalvevd glassfiberduk og Somfy motor/automatikk. SolidScreen 125 kan styres med fjernkontroll RTS (enveis kommunikasjon) eller IO (toveis). Begge
Bruk av dedikert programvare for hydrostatiske beregninger
 Avdeling for Ingeniørutdanning Institutt for Maskin- og Marinfag Øving 12a Bruk av dedikert programvare for hydrostatiske beregninger Downloads I øvingene 12a-12b bruker vi igjen vårt labskip, slik at
Avdeling for Ingeniørutdanning Institutt for Maskin- og Marinfag Øving 12a Bruk av dedikert programvare for hydrostatiske beregninger Downloads I øvingene 12a-12b bruker vi igjen vårt labskip, slik at
Batteri. Lampe. Strømbryter. Magnetbryter. Motstand. Potensiometer. Fotomotstand. Kondensator. Lysdiode. Transistor NPN. Motor. Mikrofon.
 Batteri Lampe Strømbryter Magnetbryter Motstand Potensiometer Fotomotstand Kondensator Lysdiode Transistor NPN Motor Mikrofon Høytaler Ampèremeter 1 1. Sett sammen kretsen. Pass på at motorens pluss og
Batteri Lampe Strømbryter Magnetbryter Motstand Potensiometer Fotomotstand Kondensator Lysdiode Transistor NPN Motor Mikrofon Høytaler Ampèremeter 1 1. Sett sammen kretsen. Pass på at motorens pluss og
En to-timers oppskrift for å bygge og programmere en Arduino-drevet strikk-
 Arduinobasert Strikk-kanon En to-timers oppskrift for å bygge og programmere en Arduino-drevet strikk- Joachim Haagen Skeie 1. Arduino Strikk kanon? Med Arduino strikk kanon kan du ved hjelp av en joystick
Arduinobasert Strikk-kanon En to-timers oppskrift for å bygge og programmere en Arduino-drevet strikk- Joachim Haagen Skeie 1. Arduino Strikk kanon? Med Arduino strikk kanon kan du ved hjelp av en joystick
Installasjon IDT 120. Art. nr: 320 454
 Installasjon IDT 120 Art. nr: 320 454 1. Installasjon 1.1 Soner IDT 128 installeres på steder der personer må passere når de forlater et rom eller en sone. IDT 128 sender ut et magnetfelt i en viss størrelse
Installasjon IDT 120 Art. nr: 320 454 1. Installasjon 1.1 Soner IDT 128 installeres på steder der personer må passere når de forlater et rom eller en sone. IDT 128 sender ut et magnetfelt i en viss størrelse
Kan vi forutse en pendels bevegelse, før vi har satt den i sving?
 Gjør dette hjemme 6 #8 Kan vi forutse en pendels bevegelse, før vi har satt den i sving? Skrevet av: Kristian Sørnes Dette eksperimentet ser på hvordan man finner en matematisk formel fra et eksperiment,
Gjør dette hjemme 6 #8 Kan vi forutse en pendels bevegelse, før vi har satt den i sving? Skrevet av: Kristian Sørnes Dette eksperimentet ser på hvordan man finner en matematisk formel fra et eksperiment,
Espresso maskin (cb 171)
") Espresso maskin (cb 171) Viktige sikkerhets instruksjoner Når en bruker elektriske produkter skal en alltid følge visse sikkerhets instruksjoner, inkludert følgende: 1. Les alle instruksjonene nøye. 2.
Espresso maskin (cb 171) Viktige sikkerhets instruksjoner Når en bruker elektriske produkter skal en alltid følge visse sikkerhets instruksjoner, inkludert følgende: 1. Les alle instruksjonene nøye. 2.
INSTRUKSJONSHÅNDBOK. Tusen takk for at du kjøpte krysslinjelaseren LEO 5. Vennligst les denne bruksanvisningen før du bruker den.
 INSTRUKSJONSHÅNDBOK Tusen takk for at du kjøpte krysslinjelaseren LEO 5. Vennligst les denne bruksanvisningen før du bruker den. Innhold 1. Funksjon... 3 2. Sikkerhet... 3 3. Egenskaper... 4 4. Bruksanvisning...
INSTRUKSJONSHÅNDBOK Tusen takk for at du kjøpte krysslinjelaseren LEO 5. Vennligst les denne bruksanvisningen før du bruker den. Innhold 1. Funksjon... 3 2. Sikkerhet... 3 3. Egenskaper... 4 4. Bruksanvisning...
Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birgger Vennesland
 Sluttrapport Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birger Vennesland Innledning For taubaner med to liner i løpende bærekabelsystem
Sluttrapport Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birger Vennesland Innledning For taubaner med to liner i løpende bærekabelsystem
Varslingshjelpemidler. P164A Mk II Rekkeviddeforsterker, radio. Bruks- og Monteringsanvisning
 Varslingshjelpemidler P164A Mk II Rekkeviddeforsterker, radio Bruks- og Monteringsanvisning Gjerstadveien 398, Brokelandsheia, 4993 Sundebru, tlf + 47 37119950 E-mail: post@picomed.no Foretaksnummer 962
Varslingshjelpemidler P164A Mk II Rekkeviddeforsterker, radio Bruks- og Monteringsanvisning Gjerstadveien 398, Brokelandsheia, 4993 Sundebru, tlf + 47 37119950 E-mail: post@picomed.no Foretaksnummer 962
Reunited. Hanna Dokken, Rhea Toling, Marlene Hasle, Suresh Sapkota & Jonas Blårud. Teknisk rapport. IN Bruksorientert design.
 Reunited Hanna Dokken, Rhea Toling, Marlene Hasle, Suresh Sapkota & Jonas Blårud Teknisk rapport IN1060 - Bruksorientert design Vår 2018 Institutt for Informatikk, Universitetet i Oslo Oversikt CupQuiz
Reunited Hanna Dokken, Rhea Toling, Marlene Hasle, Suresh Sapkota & Jonas Blårud Teknisk rapport IN1060 - Bruksorientert design Vår 2018 Institutt for Informatikk, Universitetet i Oslo Oversikt CupQuiz
Din bruksanvisning NOKIA RX-4
 Du kan lese anbefalingene i bruksanvisningen, de tekniske guide eller installasjonen guide for NOKIA RX-4. Du vil finne svar på alle dine spørsmål på NOKIA RX-4 i bruksanvisningen (informasjon, spesifikasjoner,
Du kan lese anbefalingene i bruksanvisningen, de tekniske guide eller installasjonen guide for NOKIA RX-4. Du vil finne svar på alle dine spørsmål på NOKIA RX-4 i bruksanvisningen (informasjon, spesifikasjoner,
(CuroCell S.A.M,, CuroCell S.A.M. CF10, CuroCell S.A.M. CF16) Service manual 2012/05. takes the pressure off
 Service manual 2012/05. takes the pressure off") CuroCell S.A.M. (CuroCell S.A.M,, CuroCell S.A.M. CF10, CuroCell S.A.M. CF16) Service manual 2012/05 takes the pressure off Innhold 1 Illustrasjoner 3 1.1 Frontpanel 3 1.2 Frontdekse 3 1.3 Sidebilde 3
CuroCell S.A.M. (CuroCell S.A.M,, CuroCell S.A.M. CF10, CuroCell S.A.M. CF16) Service manual 2012/05 takes the pressure off Innhold 1 Illustrasjoner 3 1.1 Frontpanel 3 1.2 Frontdekse 3 1.3 Sidebilde 3
Holderfestet Nokia HH-20 og CR-116/117
 Holderfestet Nokia HH-20 og CR-116/117 B D C 1 E A 3.0. utgave A C D 2 F G B E 3 4 5 6 7 10 9 8 11 2009-2010 Nokia. Alle rettigheter forbeholdt. Innledning Med holderfestet Nokia HH-20 kan du feste en
Holderfestet Nokia HH-20 og CR-116/117 B D C 1 E A 3.0. utgave A C D 2 F G B E 3 4 5 6 7 10 9 8 11 2009-2010 Nokia. Alle rettigheter forbeholdt. Innledning Med holderfestet Nokia HH-20 kan du feste en
Mindstorm, robot- og reguleringskurs
 Mindstorm, robot- og reguleringskurs Kursets mål: Sett seg inn i reguleringsteknikk og deretter planlegge, bygge og programmere en robot for å løse et gitt problem. 1 Reguleringsteknikken Reguleringsteknikken
Mindstorm, robot- og reguleringskurs Kursets mål: Sett seg inn i reguleringsteknikk og deretter planlegge, bygge og programmere en robot for å løse et gitt problem. 1 Reguleringsteknikken Reguleringsteknikken
Eksempel på endring av funksjon Tast Display Forklaring. Det nåværende funksjonsnummer vises på displayet.
 8.0 Flex Counter omdreiningsteller og balleteller 8.1 Innledning Flex Counter er et instrument med mange muligheter. Selve enheten består av en boks med et display og to betjeningstaster. Både display
8.0 Flex Counter omdreiningsteller og balleteller 8.1 Innledning Flex Counter er et instrument med mange muligheter. Selve enheten består av en boks med et display og to betjeningstaster. Både display
Dette produkt er en bevegelses detektor med sender til en mottaker i trådløse ringeklokker, og radio mottakere med veksel utgang.
 Riktig bruk av produktet BETJENINGS- OG BRUKERVEILEDNING Du har nå anskaffet deg et kvalitetsprodukt av høy kvalitet. Normale garantibestemmelser gjelder, så sant det ikke har vært utsatt gal behandling,
Riktig bruk av produktet BETJENINGS- OG BRUKERVEILEDNING Du har nå anskaffet deg et kvalitetsprodukt av høy kvalitet. Normale garantibestemmelser gjelder, så sant det ikke har vært utsatt gal behandling,
Installasjonsveiledning. Datek Lysstyring. Versjon 1.3
 Installasjonsveiledning Datek Lysstyring Versjon 1.3 1 Systembeskrivelse...3 2 Installasjonsmiljø...3 3 Installasjon av Simkort...4 4 Montering av enheten....4 5 Tilkoblinger...5 5.1 220V og kontaktorer
Installasjonsveiledning Datek Lysstyring Versjon 1.3 1 Systembeskrivelse...3 2 Installasjonsmiljø...3 3 Installasjon av Simkort...4 4 Montering av enheten....4 5 Tilkoblinger...5 5.1 220V og kontaktorer
HI-FORCE ELEKTRISKE PUMPER BRUKSANVISNING
 HI-FORCE ELEKTRISKE PUMPER BRUKSANVISNING Hi-Force HEP-serien pumper er konstruert for høytrykks hydrauliske sylindere og verktøy med maksimalt arbeidstrykk på 700 bar. Disse instruksjonene dekker alle
HI-FORCE ELEKTRISKE PUMPER BRUKSANVISNING Hi-Force HEP-serien pumper er konstruert for høytrykks hydrauliske sylindere og verktøy med maksimalt arbeidstrykk på 700 bar. Disse instruksjonene dekker alle
aanonsen TRÅDLØS DIGITAL BADETERMOMETER ART. NR
 aanonsen TRÅDLØS DIGITAL BADETERMOMETER ART. NR. 48-212 1. Beskrivelse av deler Fig.1: Mottager enhet Bruksanvisning A1 A2 A3 A4 A5 A6 A9 A8 A7 A10 A11 A12 A1: Innetemperatur A7: Ute-/vann maksimum/minimum
aanonsen TRÅDLØS DIGITAL BADETERMOMETER ART. NR. 48-212 1. Beskrivelse av deler Fig.1: Mottager enhet Bruksanvisning A1 A2 A3 A4 A5 A6 A9 A8 A7 A10 A11 A12 A1: Innetemperatur A7: Ute-/vann maksimum/minimum
Noah Wall Heater Art. Nr:
 Brukermanual Noah Wall Heater Art. Nr: 305030 Takk for at du valgte vår terrassevarmer. Denne brukermanualen vil gi deg nødvendig informasjon for riktig bruk og vedlikehold av din nye terrassevarmer. Vennligst
Brukermanual Noah Wall Heater Art. Nr: 305030 Takk for at du valgte vår terrassevarmer. Denne brukermanualen vil gi deg nødvendig informasjon for riktig bruk og vedlikehold av din nye terrassevarmer. Vennligst
Brukerhåndbok. Compact+ Bojo as. Akersbakken 12, 0172 OSLO. Utgave 0408
 Brukerhåndbok Compact+ Bojo as Akersbakken 12, 0172 OSLO Tel 23 32 75 00 Faks 23 32 75 01 www.bojo.no post@bojo.no service@bojo.no support@bojo.no Utgave 0408 2 Innholdsfortegnelse 1. Generelt... 4 Om
Brukerhåndbok Compact+ Bojo as Akersbakken 12, 0172 OSLO Tel 23 32 75 00 Faks 23 32 75 01 www.bojo.no post@bojo.no service@bojo.no support@bojo.no Utgave 0408 2 Innholdsfortegnelse 1. Generelt... 4 Om
Bruksanv. 4561Dansk-Norsk-Svens 16.12.03 15:39 Side 17. Esken inneholder
 Bruksanv. 4561Dansk-orsk-Svens 16.12.03 15:39 Side 17 Esken inneholder Gratulerer! Vi takker for tilliten ved ditt valg av OVA Vision COLOR. Vennligst les nøye igjennom denne bruksanvisning og oppbevar
Bruksanv. 4561Dansk-orsk-Svens 16.12.03 15:39 Side 17 Esken inneholder Gratulerer! Vi takker for tilliten ved ditt valg av OVA Vision COLOR. Vennligst les nøye igjennom denne bruksanvisning og oppbevar
DML Intello. Teknisk spesifikasjon Målskisser Inn- og utganger Koblinger Tilbehør
 DML Intello Teknisk spesifikasjon Målskisser Inn- og utganger Koblinger Tilbehør DML Intello Teknisk spesifikasjon DORMA DML Intello motorlåser DORMA DML Intello er en ny serie med motorlåser som er en
DML Intello Teknisk spesifikasjon Målskisser Inn- og utganger Koblinger Tilbehør DML Intello Teknisk spesifikasjon DORMA DML Intello motorlåser DORMA DML Intello er en ny serie med motorlåser som er en
BRUKERMANUAL NORSK 2011 EMS-56/EMS-57
 BRUKERMANUAL NORSK 2011 EMS-56/EMS-57 1 Vidhaugen 114 7550 Hommelvik Norway Tele: +47 73979017 E-mail: post@tgelectronics.no Web: www.tgelectronics.no TG Electronics/ Beckmann GmbH er ikke ansvarlig overfor
BRUKERMANUAL NORSK 2011 EMS-56/EMS-57 1 Vidhaugen 114 7550 Hommelvik Norway Tele: +47 73979017 E-mail: post@tgelectronics.no Web: www.tgelectronics.no TG Electronics/ Beckmann GmbH er ikke ansvarlig overfor
Monteringsanvisning for xenonsett
 Monteringsanvisning for xenonsett Les igjennom hele manualen før du begynner, det er gode tips til montering på hver eneste side. Når du monterer pærene: A: Ikke ta på pæra, fett fra fingrene dine ødelegger
Monteringsanvisning for xenonsett Les igjennom hele manualen før du begynner, det er gode tips til montering på hver eneste side. Når du monterer pærene: A: Ikke ta på pæra, fett fra fingrene dine ødelegger
Byggeguide. Regler og tips for bygging av Ope-løsninger
 Byggeguide Regler og tips for bygging av Ope-løsninger Ope-systemet 3-er brakett Brukes rundt bakveggen i et hyllerom, der tre flater møtes. 2-er brakett Brukes rundt åpningen i et hyllerom, der to flater
Byggeguide Regler og tips for bygging av Ope-løsninger Ope-systemet 3-er brakett Brukes rundt bakveggen i et hyllerom, der tre flater møtes. 2-er brakett Brukes rundt åpningen i et hyllerom, der to flater
Teknisk dokumentasjon for Ludosphaera
 Teknisk dokumentasjon for Ludosphaera Av Gameguru ved Nikolas Ebbesberg, Silje Helene Lund, Vanessa Storøy Merine, Erik Nystad og Maria Løvland Johansson IN1060 - Vår 2019 Institutt for Informatikk Matematisk-Naturfaglige
Teknisk dokumentasjon for Ludosphaera Av Gameguru ved Nikolas Ebbesberg, Silje Helene Lund, Vanessa Storøy Merine, Erik Nystad og Maria Løvland Johansson IN1060 - Vår 2019 Institutt for Informatikk Matematisk-Naturfaglige
Steg 1: Installasjon. Steg 2: Installasjon av programvare. ved nettverkstilkoblingen på baksiden av kameraet. Kameraet vil rotere og tilte automatisk.
 Innhold Steg 1: Installasjon... 3 Steg 2: Installasjon av programvare... 3 Steg 3. Oppsett av wifi, email varsling og alarm... 5 Steg 4: Installasjon og oppsett av mobil app... 8 Steg 5: Installasjon og
Innhold Steg 1: Installasjon... 3 Steg 2: Installasjon av programvare... 3 Steg 3. Oppsett av wifi, email varsling og alarm... 5 Steg 4: Installasjon og oppsett av mobil app... 8 Steg 5: Installasjon og
Trinn 1: Lokaliser de nødvendige kablene på motoren.
 Gratulere med ny turtallsperre. Monteringen består av tre trinn. Det er viktig at du leser gjennom hele denne bruksanvisningen før du starter monteringen av turtallsperren. Det anbefales å gjennomgå alle
Gratulere med ny turtallsperre. Monteringen består av tre trinn. Det er viktig at du leser gjennom hele denne bruksanvisningen før du starter monteringen av turtallsperren. Det anbefales å gjennomgå alle
BILAG TIL QUADJOY MUS. Quadjoy mus. - en veileder for bruk og innstillinger
 BILAG TIL QUADJOY MUS Quadjoy mus - en veileder for bruk og innstillinger Quadjoy mus Artikkel nr 18711 HMS art.nr.: 061993 Innhold 01 Kom i gang 3 Montering 3 Stille inn hastighet 3 Grunninnstillinger
BILAG TIL QUADJOY MUS Quadjoy mus - en veileder for bruk og innstillinger Quadjoy mus Artikkel nr 18711 HMS art.nr.: 061993 Innhold 01 Kom i gang 3 Montering 3 Stille inn hastighet 3 Grunninnstillinger
Varenr HMS-nr.: Barnevakt BARN10. Brukerhåndbok. Dok. nr.: 2304A1 Dato:
 Barnevakt BARN10 Varenr. 1519 HMS-nr.: 233409 Brukerhåndbok Dok. nr.: 2304A1 Dato: 2017.04.19 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme i gang 4 Still
Barnevakt BARN10 Varenr. 1519 HMS-nr.: 233409 Brukerhåndbok Dok. nr.: 2304A1 Dato: 2017.04.19 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme i gang 4 Still
HMS art.nr FlexiBlink. Bruksanvisning. Berøringsfri IR sensor. IR-HÅNDe Dok.nr.: 0283D. Vestfold Audio Sandefjord
 Bruksanvisning Berøringsfri IR sensor IR-HÅNDe 2017-10-04 Dok.nr.: 0283D Vestfold Audio Sandefjord 1 Innholdsfortegnelse Teknisk informasjon... 2 Innledning... 3 Hva IR-sensor-pakken inneholder... 4 Daglig
Bruksanvisning Berøringsfri IR sensor IR-HÅNDe 2017-10-04 Dok.nr.: 0283D Vestfold Audio Sandefjord 1 Innholdsfortegnelse Teknisk informasjon... 2 Innledning... 3 Hva IR-sensor-pakken inneholder... 4 Daglig
Brukerhåndbok RUBY. Bojo as. Akersbakken 12, 0172 OSLO. Utgave 0311
 Brukerhåndbok RUBY Bojo as Akersbakken 12, 0172 OSLO Tel 23 32 75 00 Faks 23 32 75 01 www.bojo.no post@bojo.no service@bojo.no support@bojo.no Utgave 0311 2 Innholdsfortegnelse RUBY... 1 Innholdsfortegnelse...
Brukerhåndbok RUBY Bojo as Akersbakken 12, 0172 OSLO Tel 23 32 75 00 Faks 23 32 75 01 www.bojo.no post@bojo.no service@bojo.no support@bojo.no Utgave 0311 2 Innholdsfortegnelse RUBY... 1 Innholdsfortegnelse...
Mobiltelefonsender MOBIL10
 Mobiltelefonsender MOBIL10 Varenr. 1512 HMS-nr.: 233427 Brukerhåndbok Dok. nr.: 2299A1 Dato: 2017.04.19 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme
Mobiltelefonsender MOBIL10 Varenr. 1512 HMS-nr.: 233427 Brukerhåndbok Dok. nr.: 2299A1 Dato: 2017.04.19 Innholdsfortegnelse 1. Innledning 3 2. Oversikt 4 Utvendig 4 Batteriet 4 Under lokket 4 3. Komme
Antenne 2 meter nettverkskabel Splitter. Strømadapter 15 meter nettverkskabel Skjøtestykke. Drill med 16mm bor Stjernetrekker Skiftenøkkel
 25 dbi Antenne 2 meter nettverkskabel Splitter Strømadapter 15 meter nettverkskabel Skjøtestykke Veggfeste Pakning Drill med 16mm bor Stjernetrekker Skiftenøkkel Bruk dekningsapp for å finne senderstasjoner
25 dbi Antenne 2 meter nettverkskabel Splitter Strømadapter 15 meter nettverkskabel Skjøtestykke Veggfeste Pakning Drill med 16mm bor Stjernetrekker Skiftenøkkel Bruk dekningsapp for å finne senderstasjoner
MONTERINGSANVISNING TERMPORTEN
 MONTERINGSANVISNING TERMPORTEN MONTERINGSANVISNING Før du setter i gang. For montering, bruk og vedlikehold av denne porten på en sikker måte, er det flere forutsetninger som må tas. For sikkerheten til
MONTERINGSANVISNING TERMPORTEN MONTERINGSANVISNING Før du setter i gang. For montering, bruk og vedlikehold av denne porten på en sikker måte, er det flere forutsetninger som må tas. For sikkerheten til
Sensotec Reporter BASIC
 Sensotec Reporter Basic bruker manual Oktober 2008 side 1 av 6 Sensotec Reporter BASIC Manual for: ENKEL bruker funksjoner lesemaskin for trykt tekst Bruker manual version 3.0 Oktober 2008 Sensotec Reporter
Sensotec Reporter Basic bruker manual Oktober 2008 side 1 av 6 Sensotec Reporter BASIC Manual for: ENKEL bruker funksjoner lesemaskin for trykt tekst Bruker manual version 3.0 Oktober 2008 Sensotec Reporter
BRUKSINSTRUKS AB CHANCE TYPE C403-3179
 BRUKSINSTRUKS AB CHANCE TYPE C403-3179 For prøving av betjeningsstenger i våt eller tørr tilstand INTRODUKSJON AB Chance betjeningsstang tester er et transportabelt komplett utstyr for testing av betjeningsstenger.
BRUKSINSTRUKS AB CHANCE TYPE C403-3179 For prøving av betjeningsstenger i våt eller tørr tilstand INTRODUKSJON AB Chance betjeningsstang tester er et transportabelt komplett utstyr for testing av betjeningsstenger.
Presentasjon. Gruppa består av Mari Hegnastykket og Birgitte Reime som går på vg 1. studiespesialisering.
 Forord Vi i Norge er svært heldige. Vi har store energikilder av olje og gass, som gir Norge gode inntekter, slik at vi kan leve i et land med stor velferd. Vi har gjort oss avhengige av disse energikildene,
Forord Vi i Norge er svært heldige. Vi har store energikilder av olje og gass, som gir Norge gode inntekter, slik at vi kan leve i et land med stor velferd. Vi har gjort oss avhengige av disse energikildene,
FlexiBlink Bruksanvisning UNIVERSALSENDER B-UNIe
 Bruksanvisning UNIVERSALSENDER B-UNIe 2012-03-16 Dok.nr.: 0275B Vestfold Audio AS Sandefjord 1 Innholdsfortegnelse Teknisk informasjon... 2 Innledning... 3 Hva Universalsender-pakken inneholder... 4 Brukerveiledning...
Bruksanvisning UNIVERSALSENDER B-UNIe 2012-03-16 Dok.nr.: 0275B Vestfold Audio AS Sandefjord 1 Innholdsfortegnelse Teknisk informasjon... 2 Innledning... 3 Hva Universalsender-pakken inneholder... 4 Brukerveiledning...