GPS / GNSS (fordypning/tutorial)
|
|
|
- Anne-Lise Holt
- 8 år siden
- Visninger:
Transkript
1 1
2 GPS / GNSS (fordypning/tutorial) Ola Øvstedal Seksjon for geomatikk, IMT, NLH 2
3 Program Systembeskrivelse Måling / beregning av koordinater Feilkilder Nøyaktighetsfremmende tiltak Fattigmanns-GPS Bruk av håndholdte mottakere Gratis-tjenester for data-prosessering ola.ovstedal@imt.nlh.no 3

4 GNSS Global Navigation Satellite Systems GPS amerikansk militært system første satellitt i satellitter pr. mai 2004 dagens dominerende system GLONASS russisk (tidligere sovjetisk) militært system første satellitt i satellitter i 1996/97. 9 satellitter pr. mai Har i perioder vært tvil om framtidig utvikling Galileo europeisk sivilt system første satellitt i Planlagt operativt i

5 GPS Systembeskrivelse og anvendelser Utgangspunk: Bestemme koordinater til ukjente punkt (GPS-antenne) ved å måle avstander til punkter med gitte koordinater (satellitter) Nøyaktighet: 100 m m GPS-mottaker Observasjonsstørrelser Observasjons- og beregningsteknikk Måletid i hvert punkt Geometri (DOP-verdier) 5

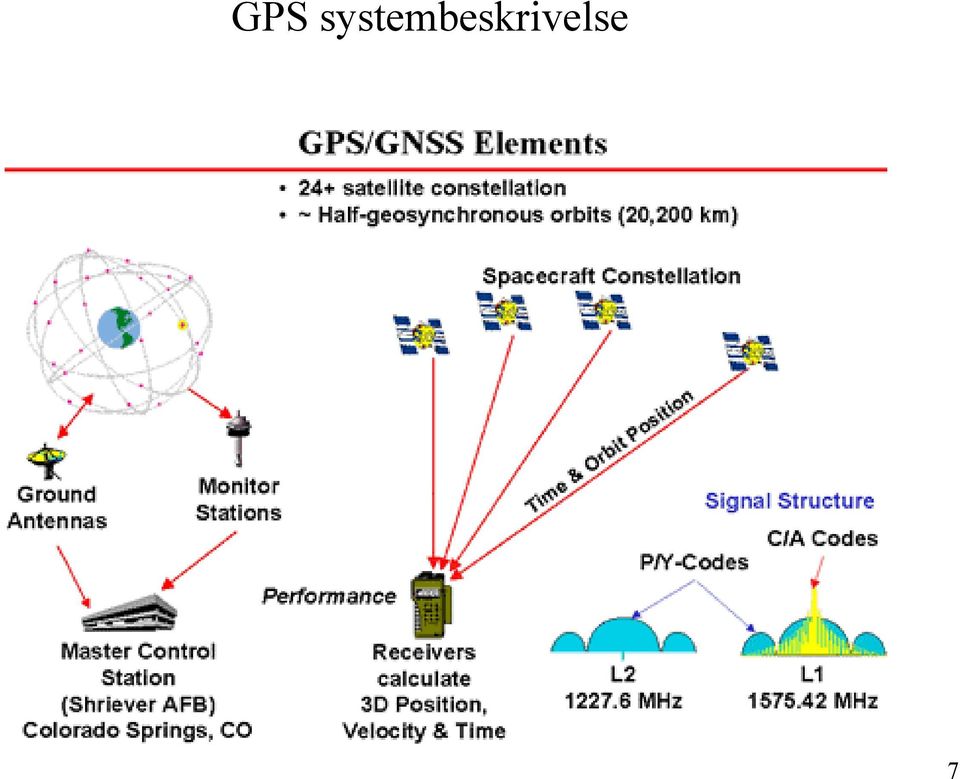
6 De tre segmentene i GPS-systemet Romsegmentet Kontrollsegmentet Brukersegmentet 6

7 GPS systembeskrivelse 7
8 Operational Control System (OCS) Monitorere signalene fra GPS-satellittene Avdekke feil Beregne systemdata (for eksempel satellittkoordinater og satellittklokkekorreksjoner) Sende systemdata til satellittene via kommunikasjonslinker. Satellittene klarer seg en viss tid uten kontakt med OCS Block I satellitter : 3-4 dager Block II satellitter: 14 dager Block IIA satellitter: 180 dager Block IIR satellitter: > 180 dager 8

9 Lokalisering av kontrollsegmentet 9

10 Monitor stasjon og bakkebasert antenne DSCS Defence Satellite Communication System 10

11 Baneberegning Beregne koordinater til satellittene med målinger (avstander) som er foretatt i punkter med kjente koordinater. Tid spiller en avgjørende rolle Måler avstander ved å måle signalenes gangtid fra satellitt til mottaker: Avstand = gangtid x lyshastighet Satellittene og mottakerne beveger seg i forhold til hverandre. Tidsmerke målingene Regne ut satellittkoordinater ved riktig tidspunkt Referanseramme ( Datum ) 11

12 Tidsbegrepet i GPS Internasjonal Atomtid (TAI) - realiseres ved atomklokker 1 sekund er definert som svingninger av cesium-isotop 133. Universal tid UT UT1 - et mål for jordens rotasjon : varierer med tiden UTC - Definert ved atomtid og UT1 Kriterie for skuddsekund: UT1 UTC > 0.9 sek GPS-tid Identisk med UTC pr. 6. Januar 1980 Er en kontinuerlig (atom) tid : Har ikke skuddsekund Tiden angis ofte som uke-nummer og sekunder i uka 12

13 Skuddsekunder / Leapseconds GPS-tid - UTC-tid Leapseconds / sjaltesekund GPS-tid er identisk med UTC-tid pr. 6. Januar Kriterium for skuddsekund: UT1 UTC > 0.9 sek Antall skuddsekunder sendes i satellittenes navigasjonsmelding År 13

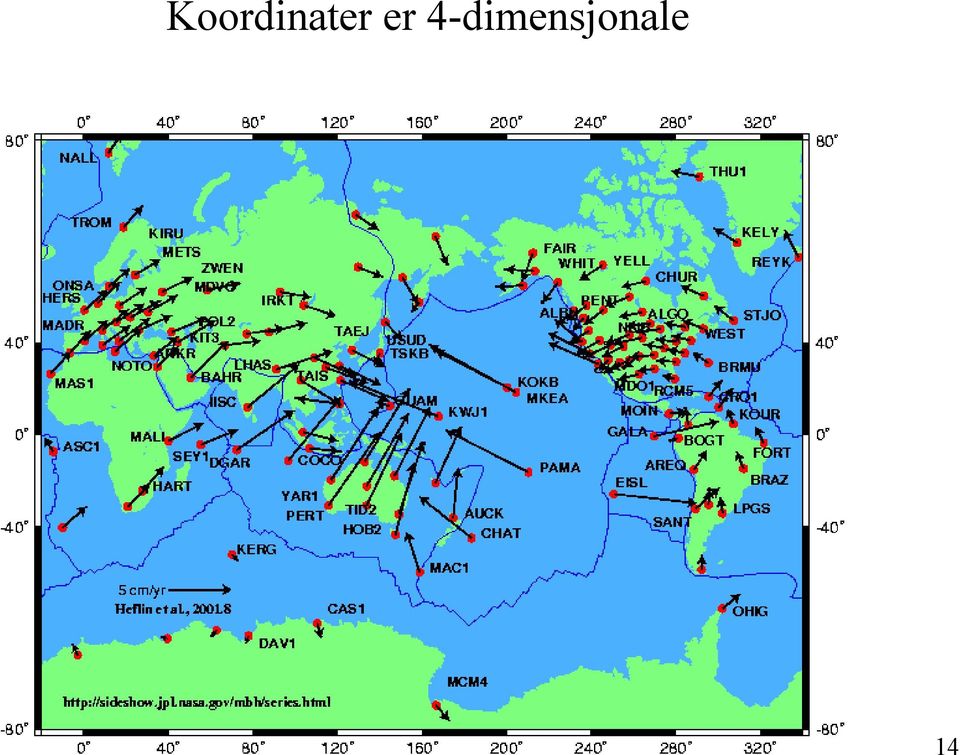
14 Koordinater er 4-dimensjonale 14
15 Aktuelle referanserammer ITRF (International Terrestrial Reference Frame) Realisert ved brukt av flere romgeodetiske teknikker (GPS, SLR, DORIS, VLBI, LLR). Globalt nettverk av observasjonssteder Blir materialisert i form av en katalog med et sett kartesiske, geosentriske koordinater x,y,z (i meter) og hastighetskomponenter (i meter pr. år). Origo i jordas massesenter Summen av alle hastighetskomponenter satt lik null (dvs. at referanserammen ikke skal ha noen netto rotasjon i forhold til jordkroppen). Forskjellige utgaver referert med årstal. Siste utgave er ITRF
. Origo i jordas massesenter Summen av alle hastighetskomponenter satt lik null (dvs.")
16 World Geodetic System brukt av GPS sitt kontrollsegment - WGS84 Transformasjon mellom NSWX-9Z2 (brukt for TRANSIT-DOPPLER) og BIH Conventional Terrestial System (nå erstattet av ITRF) ved epoken Nøyaktighet på 1-2 m relativt ITRF WGS84 G730 (2/2.1994) Tatt i bruk av GPS Control Segment 29/ WGS84 G873 (30/9.1996) Tatt i bruk av GPS Control Segment 29/ Nøyaktighet på 0.10 m relativt ITRF94 WGS84 G1150 (20/1.2002) Tatt i bruk av GPS Control Segment 20/ Nøyaktighet på ca m relativt ITRF
 Tatt i bruk av GPS Control Segment 20/1.2002 Nøyaktighet på ca. 0.01 m relativt ITRF2000 16")
17 WGS84-ellipsoiden b a Ellipsoiden størrelse: a = m Ellipsoiden form: f = (a-b) / a = 1 /

18 ITRF / WGS84 / EUREF89 GPS-satellittene sine kringkastede koordinater er gitt i WGS84 (WGS84 er pr. i dag identisk med ITRF) Norsk datum ( referanseramme ) er i dag EUREF89: Realisering av ITRF ved epoken Ca. 0.3 differanse mellom EUREF89 og WGS84/ITRF koordinater grunnet kontinentale plateforskyvninger Betydning ved absolutt posisjonsbestemmelse, ved relativ posisjonsbestemmelse er effekten liten/neglisjerbar. Tidligere norsk datum var NGO1948 Fremdeles mye brukt i for eksempel økonomisk kartverk Krever spesielle grep, avhengig av nøyaktighetkrav. 18

19 Regionale tektoniske plateforskyvninger Europa 2 cm (nord-øst) Australia 7 cm (nord-øst) Midtøsten 2 cm (nord-øst) Nord-amerika 1 cm (nord-vest) Sør-amerika 2 cm (north) Afrika 3 cm (nord-øst) Asia 3 cm (nord-øst) Ved krav om høy nøyaktighet ved presis absolutt posisjonsbestemmelse eller differensiell posisjonsbestemmelse over lange avstander, må koordinatene oppfattes som 4-dimensjonale 19

20 GPS og høyder Vanligvis ønskes høyder som er relatert til tyngdefeltet ( geoiden ) Ellipsoidiske høyder bestemt med GPS må da korrigeres. 20

21 Romsegmentet 21
22 GPS Block II satellitt 22
23 GPS konstellasjon (nominell) med 24 satellitter (28 satellitter pr. mai 2004) 23
24 GPS konstellasjon (nominell) 24 satellitter 6 baneplan 4 satellitter i hvert baneplan 55 deg inklinasjon Omløpstid på 11 t 58 min Nær sirkulære baner med radius ca km 24
25 Visualisering av satellittbanenes eksentrisitet Keplers første lov: Satellittene beveger seg i Ellipsebaner. 25
26 GPS konstellasjon 26
27 GPS banespor 27
28 Generasjoner av GPS-satellitter Block I Block II Block IIA Block IIR Block IIF Prototype (test) satellitter. 10 satellitter sendt opp i tidsrommet Alle er nå ute av drift. Initial Operation Satellites. 9 satellitter sendt opp i tidsrommet satellitter er ennå i drift. Slightly modified Block IIs. 19 satellitter sendt opp i tidsrommet er fremdeles i drift. Replenishment satellites. Foreløpig er 10 satellittes sendt opp. Første oppskytning i Kommende satellitter vil ha ny sivil C/A-kode på L2-frekvensen. Follow-on satellites. Ny sivil frekvens på MHz. Første satellitt i 2005/2006 (?). Block III Conseptual 28
29 Antall oppskytninger og satellitter 29
30 Antall aktive GPS-satellitter 30 II II A II R # aktive satellitter
31 Kringkastet navigasjonsmelding - sendt som en del av signalene fra satellittene - Modulert på: L1: * C/A-kode * P-kode I kvadratur L2: * P-kode Data-rate : 50 bit/sec Delt inn i 25 rammer a 1500 bit (t=30 sec) Hver ramme delt inn i 5 sub-rammer a 300 bit (t=6 sec) Hver subramme delt inn i 10 ord a 30 bit (t=0.6sec) For nedlesing av almanakkdata for alle satellittene, må hele meldingen mottas: Lengde: 25 x 1500 bit = bit (t=750 sec = 12 min 30 sec) 31
32 Navigasjonsmelding - format 32
33 Navigasjonsmelding - innhold 33
34 Innholdet i kringkastet navigasjonsmelding 34
35 Notice Advisory to Navstar Users (NANU) - meldinger fra kontrollsegmentet, kan abonnere på E-poster - NOTICE ADVISORY TO NAVSTAR USERS (NANU) SUBJ: SVN38 (PRN08) UNUSABLE JDAY 124/ UNTIL FURTHER NOTICE 1. NANU TYPE: UNUSUFN NANU NUMBER: NANU DTG: Z MAY 2004 REFERENCE NANU: N/A REF NANU DTG: N/A SVN: 38 PRN: 08 START JDAY: 124 START TIME ZULU: 1117 START CALENDAR DATE: 03 MAY 2004 STOP JDAY: UFN STOP TIME ZULU: N/A STOP CALENDAR DATE: N/A 2. CONDITION: GPS SATELLITE SVN38 (PRN08) WILL BE UNUSABLE ON JDAY 124 (03 MAY 2004) BEGINNING 1117 ZULU UNTIL FURTHER NOTICE.. 35
36 GPS kringkastet efemeride - kvasi keplerelementer Formelverk for å regne om fra keplerelementer til jordfaste WGS84-koordinater. Koordinater i ellipsens plan (e1,e2) Koordinater i Celestisk ( himmelfast ) system (x,y,z) Koordinater i jordfast system. (x,y,z) Bruk av keplerelementer er en effektiv måte å pakke satellittkoordinatene på.! 36
37 GPS - Signalstruktur Spredt spektrum-teknikk for utsendelse av en navigasjonsmelding: Robust mot jamming Pseudorandom koder (P/W- og C/A-kode) brukt som spredekoder. En unik kode for hver satellitt, svært lite korrelerte med hverandre GPS-mottakeren modulo-2 adderer mottatt signal med egengenerert kopi av spredekoden (P/W- og C/A-kode): Identifiserer satellitten Dekoder navigasjonsmeldingen (jfr. parabolanlegg) Bruker spredekoden til å målde avstand mellom satellitt og mottaker. 37
38 Modulo-2 addisjon -1 settes her til 0: = = = = 1 38
39 Modulering av digital informasjon på en bærebølge 39
40 Modulert signal L1(t) = a 1 P(t) W(t) D(t) cos(f 1 t) + a 1 C/A(t) D(t) sin(f 1 t) L2(t) = a 2 P(t) W(t) D(t) cos(f 2 t) C/A-kode er plassert i fase-kvadratur (dvs. 90 deg offsett): sin(f t) = cos(π/2 - f t) 40
41 Signaler i GPS-systemet 41
42 Signaler i GPS-systemet 42
43 Fra signaler til observasjoner f 0 L1 X 154 L2 X 120 C/A + P + Data P + Data GPS-mottaker C/A, (P1), (P2), L1, (L2), Data 43
44 GPS - Observasjonsstørrelser Frekvens λ λ x 1% C/A-kode MHz 293 m 2.9 m P-kode MHz 29.3 m 0.29 m L MHz 0.19 m 1.9 mm L MHz 0.24 m 2.4 mm 44
45 GPS observasjon - avstandsmåling GPS-observasjoner: avstandsmålinger - kode (pseudorange) - bærebølgene (fase) 45
46 Avstandsmåling - EDM To-veis avstandsmåling: - aktivt system 46
47 Avstandsmåling - GPS En-veis avstandsmåling: - passivt system 47
48 GPS-mottaker 48
49 En generalisert GPS-mottaker 49
50 Pseudorange (kode-fasemåling) 50
51 Pseudorange avstandsmåling Fra satellitt: Generert i mottaker: 51
52 Pseudorange avstandsmåling 52
53 Pseudorange avstandsmåling 53
54 Pseudorange (kode) måling Pseudorange: 54
55 Pseudorange (pseudo-avstand) 55
56 Fasemåling på bærebølgen 56
57 Akkumulert faseobservasjon 57
58 To typer avstandsmålinger To typer avstandsobservasjoner: 1. Kode (pseudorange) Entydige (robuste) Nøyaktighet ca. 0.5 m 3 m 2. Fase (måling ved hjelp av bærebølgen) Flertydige (avstandene har et offset på et ukjent antall hele bølgelengder), krevende å bruke. Nøyaktighet ca m m De fleste mottakere og programvarer gjør bruk av både kode- og fasemålingene Faseglatting av kode, bruke den glattede koden som observasjoner Separat vekting av kode og fase, bruker både kode og fase som observasjoner. 58
59 Selective Availability (SA) Degradert nøyaktighet for sivile anvendelser Pålagt feil på: 1. Satellittens klokker 2. Kringkastede satellittkoordinater i Navigation Message (som er modulert sammen med C/A-kode) Absolutt nøyaktighet (dvs. Bruk av kun en mottaker): 100 m horisontalt 156 m i høyde 95 % Effekten av SA elimineres nesten helt ved differensielle målinger (NB!!nær samtidige målinger) Nivået til SA redusert til null 2. mai
60 Effekt av Selective Availability (SA) 2. Mai S rhellinga 2. mai 2000 Feil i H yde koordinat (meter) S rhellinga 2. mai UTC (timer) S rhellinga 2. mai Feil i Nord koordinat (meter) Feil i st koordinat (meter) UTC (timer) UTC (timer) 60
61 Anti-Spoofing (AS) P-koden blir mult. med en hemmelig W-kode : Y- kode P-koden ikke lenger tilgjengelig for sivile brukere Kun C/A kode og L1-fase tilgjengelig for sivile brukere Konsekvens: Sivile brukere kan ikke eliminere effekten av ionosfære Vanskeligere å beregne faseløsning med høy nøyaktighet (fix-løsning) o Reparere fasebrudd (cycle slips) o Initialisere flertydighetene til faseobservasjonene Signaler fra nye satellitter vil ha sivil C/A-kode på L2, ny L5 frekvens fra 200? 61
62 Sivil omgåelse av AS (ref. Leick, 1995) Teknikk Kvadrering Kode-støttet kvadrering Krysskorrelasjon Firma (eks) Div. eldre Leica SR299 Trimble 4000 Turbo Rogue C/A Nei Ja Ja Ja Ashtech P/Y-kode Nei Y1 (*) Y2 Y1 Y1, Y2 L2 - bølge Halv Halv (*) Full Full Z-tracking S / N (ref. Z-Track) -16 db (0.025) -3 db (0.5) -13 db (0.05) Tall for tap er S/N er relatert til Ashtech Z-tracking 0 db (1) Direkte tilgang til P-kode: S/N vinst på 6-14 db 62
63 Beregning av koordinater GPS-observasjoner og navigasjonsmelding Mottakerspesifikt format : binære filer RINEX (Receiver INdependent EXchange) format: ASCII-filer Data tilgjengelig over Internet (for eksempel fra IGS) Konvertere fra binære mottakerspesifikke filer Tidligere kun fra geodetiske mottakere (dyre), nå også fra håndholdte mottakere som Garmin GPS 12 og Garmin Etrex. 63
64 RINEX observasjonsfil, eks. 2 O G RINEX VERSION / TYPE XP100 Thales GeoSolutions 22-JAN-04 PGM / RUN BY / DATE MARKER NAME Thales GeoSolutions OBSERVER / AGENCY MS750 (Trimble) REC # / TYPE / VERS Other ANT # / TYPE APPROX POSITION XYZ ANTENNA: DELTA H/E/N 1 1 WAVELENGTH FACT L1/2 5 C1 D1 L1 P2 L2 # / TYPES OF OBSERV 1 INTERVAL GPS TIME OF FIRST OBS END OF HEADER G 1G 2G 3G 8G16G20G27G G 1G 2G 3G 8G16G20G27G
65 RINEX navigasjonsfil, eks. 2 NAVIGATION DATA RINEX VERSION / TYPE CCRINEXN V1.6.0 UX CDDIS 23-JAN-04 02:39 PGM / RUN BY / DATE IGS BROADCAST EPHEMERIS FILE COMMENT D D D D-06 ION ALPHA D D D D+05 ION BETA D D DELTA-UTC: A0,A1,T,W 13 LEAP SECONDS END OF HEADER D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D D+00 65
66 Absolutt posisjonsbestemmelse med kode- / pseudorange-måling Vi har i regelen et overbestemt system (flere observasjoner enn ukjente parametre): Utjevning Kalman-filtrering Minste-kvadraters-metode (jfr. Regresjonsanalyse) Organisering av parametre: Observasjoner: Avstander (pseudo) Ukjente: Mottaker-koordinater og klokkefeil ( 4) Gitte: Satellittkoordinater og klokkefeil Sanntid: fra Navigation Message Etterprosessering: fra sivile beregningssentre, f.eks. IGS Regne ut satellittkoordinatene ved riktig tidspunkt Tidspunktene da signalene forlot satellittene Korrigere for jordrotasjon i løpet av sigalenes gangtid (ca sek) Påføre korreksjoner på observasjonene 66
67 Absolutt posisjonsbestemmelse ved MKM Utgangspunkt: R Uttrykker observasjonene som funksjon av de ukjente parametrene: R j j j i ( t) = ρi + c ( dti dt ) + drtrop + driono + j j i ( t) ( c dt + drtrop + driono + drrel ) = ρ j i dr Rel + c dt i De ukjente mottakerkoordinatene inngår i: ρ j i = ( j ) ( j ) 2 ( j x x + y y + z z ) 2 i 2 i i 67
68 68 Absolutt posisjonsbestemmelse ved MKM Observasjonsligninga er ikke-lineær, innfører foreløpige verdier (x 0 ) og lineariserer rundt disse: På matriseform: l = A dx Løsning: dx = Q A T l, Q = (A T A) -1 Oppdatering: x = x 0 + dx i j i i j j i i j j i i j j i ddt c dz z z dy y y dx x x R + = ρ ρ ρ (...)
69 Absolutt posisjonsbestemmelse med MKM Nøyaktighet: s x = s 0 PDOP s x er standardavviket til beregnede koordinater (tre-dimensjonale) s 0 er standardavviket til en enkel kode-observasjon (vekt = 1) PDOP er mål for satellittgeometri PDOP = q + q + xx yy q zz 69
70 Beregning av DOP-verdier Verdier for Dilution Of Precision kan også simuleres i forkant av målingene Mission Planning programmer bruker tidligere viste formler for å regne ut DOP-verdier. Hva er input for Mission Planning programmet : Omtrentlige mottakerkoordinater - fra f.eks. et kart Omtrentlige satellittkoordinater - almanakkdata fra mottaker eller fra f.eks. US Coast Guard (YUMA format) Tidspunkt for målingene (NB! Pass opp for offset fra UTC) 70
71 Nøyaktighet (forts.) Nøyaktighet: s x = s 0 PDOP s 0 er standardavviket til en enkel kode-observasjon (vekt = 1) Kan beregnes etter MKM-utjevningen: s 0 = T v v n e v T v er feilkvadratsum n er antall observasjoner (vanligvis lik antall satellitter) e er antall ukjente parametre (vanligvis lik 4) Ved flere etterfølgende målinger i hvert punkt er estimated av s 0 ofte for optimistisk => Nyttig å vite hvilken s 0 en kan forvente. 71
72 Feilkilder Feil i satellittkoordinater Ca. 3 meter feil i dagens kringkastede satellittkoordinater Ca m feil i presise etterprosesserte koordinater Effekten reduseres ved differensielle målinger Feil i satellittklokke-korreksjonene Ca. 3-5 meter feil i dagens kringkastede korreksjoner Ca m feil i presise etterprosesserte korreksjoner Effekten elimineres ved differensielle målinger Atmosfære Troposfære Ionosfære Multipath 72
73 Atmosfæriske effekter: Troposfære Troposfære (neutrosfære: er ikke-dispersiv)): 0-40 km Effekt er en funksjon av: elevasjonsvinkel til satellitten Trykk, temperatur og luftfuktighet Skiller mellom: Tørr del: 90 % (lett å modellere) Våt del : 10 % (vanskelig å modellere) Samlet effekt i senit: ca. 2.3 m Bruk standard atmosfære, skaler etter høyden til stasjonen Ved relativ GPS: Påvirkning av høydekoordinatene Kan estimeres som ukjent parameter i beregning av koordinater (krever lange observasjonstider) 73
74 Atmosfæriske effekter: Ionosfære Ionosfære: km Effekt: Funksjon av frekvens (dispersiv), elektrontetthet og høydevinkel til satellitten. dr Iono = 40.3 k / f 2 : Ulik effekt på L1/L2 (-) og på P1/P2 (+) To-frekvente brukere kan korrigere målingene sine: dr IONO,1 = 1 ( R1 R2 ) 2 2 f 1 f 2 f 2 74
75 Eliminering av ionosfæren Eliminering av ionosfære krever to-frekvente mottakerer Ulempe - økt målestøy: s = 2 ( k s ) + ( k s ) 2 P3 1 P1 2 P2 k1 = k2=1.546 s P1 og s P2 er standardavviker til hhv. P1 og P2 Lønner seg ikke for relativ GPS over korte avstander!! 75
76 Ionosfæriske forstyrrelser Varierer i tid og i rom 76
77 Variasjon i tid : 11 års sykluser Tidsserie over solflekkaktivitet 77
78 Korrigering av ionosfære for en-frekvente brukere (absolutt posisjonsbestemmelse) 6 Ion. delay in metres at L Klobuchar Ionospheric model - station Onsala - DOY 233 / 20 August Azimuth : 180 deg - Elevation: 45 deg Kringkastet modell i Navigation Message Klobuchar-modellen fanger opp ca. 50 % Parametrisert som en halv cosinus svingning Time in hours (UTC) 78
79 Feilkilder - Ionosfære Kan i ekstreme tilfelle føre til målefeil på 100m (absolutte målinger) Virkningen ved differensielle målinger redusert til målestokksfeil på ca ppm Vi har nå vært inne i periode med mye ionosfæreaktivitet: Hovedproblem i Norge (høy breddegrad): Scintillasjoner: (dvs. raske forandringer i avstandsobservasjonene) Fading: Mottakerne kan miste faselås, verst på L2- frekvensen (Grunnet Anti-Spoofing ) 79
80 Ionosfære - monitorering Eksempel i SØ-Norge, CPOS-nettet 80
81 Ionosfære - monitorering Ionosfærisk døgnvariasjon i zenit 81
82 Ionosfære - monitorering Effekt på absolutt posisjonsbestemmelse Sørhellinga 82
83 Ionosfære - monitorering Effekt på differensiell posisjonsbestemmelse SØRH -ÅRNES 83
84 Feilkilder - multipath Signaler som er blitt redusert fra nærliggende flater interferer med signaler som går direkte fra satellitt til mottakerantenne. Direkte signal er alltid sterkest (hovedsignal) Indirekte signaler blir dempet når de blir reflektert De indirekte signalene drar i de direkte signalet og fører til at observasjonene blir feil Største feil for fasemålinger: ¼ bølgelengde (teoretisk max-verdi) Største feil for kodemålinger: noen titalls meter Virkningen reduseres ikke ved differensielle målinger (vil tvert imot øke grunnet bidrag fra referansemottakere). Multipath har et (tilnærmet) periodisk forløp, perioditet på ca. 2 min 10 min. Multipath er (sammen med virkningen av eventuelt redusert satellittgeometri) den feilkilden som er mest kritisk ved stedfesting. 84
85 Multipath praktiske forholdsregler Mottakerteknologi Forbedret correlator teknologi for måling av kode Filtrering i mottakernes firmware Antenneteknolgi Grunnplan under selve antenne-elementet Choke-ring (tar kun lave signaler - egnet for referansemottaker) Antenner med lav følsomhet ved lave elevasjonsvinkler Polariserte antenner Unngå vanskelige punkter (fremdeles beste praktiske råd!!) Måle over lengre tid i hvert punkt: Midlingseffekt 85
86 Hvordan øke nøyaktigheten til absolutt posisjonsbestemmelse? Relative (differensielle) målinger Krever observasjoner/korreksjoner fra referansemottakere som opererer i punkter med kjente koordinater. Egne lokale referansemottakere Bruke etablert infrastrukur (kommersielle, gratis) Presis absolutt posisjonsbestemmelse Observasjoner fra kun en mottaker Satellittkoordinater og - klokkekorreksjoner fra for eksempel IGS (International GPS Service) 86
87 Differensiell GPS - motivasjon Dominerende feilkilder: Feilkilde Reduksjon ved samtidige målinger (SA) ( X ) reduksjon ved nære målinger Atmosfære Satellittklokke Banefeil Multipath Mottakerstøy x x x 87
88 dgps prinsipper for Base GPS-mottaker i et punkt med kjente koordinater 1. Observerer pseudoavstander til alle tilgjengelige satellitter (R Bj ) 2. Regner ut geometriske avstander til de samme satellittene (D Bj ) 3. Regner ut dgps-korreksjon: dr j = D j B B R j B 4. Sender ut dgps-korreksjonene over en kanal: Kystverkets sendere NRK P2 / RDS Geostasjonær satellitt 88
89 dgps prinsipper for Rover GPS-mottaker i et punk der koordinatene skal bestemmes 1. Observerer pseudoavstander til tilgjengelige satellitter (R Rj ) 2. Mottar dgps-korreksjoner 3. Korrigerer målte pseudoavstander: R R j = R R j +dr B j 4. Beregner posisjon (abs. pos. modell) 89
90 dgps - korreksjonsdata Forsinkelse til mottatt signal: ca. 3-7 sek Forsøkt modellert med range-rate) Standard format for dgps-korreksjoner: RTCM 104 o tidspunkt o Avstandskorreksjoner for hver satellitt o Hastighetskorreksjoner for hver satellitt 90
91 dgps - nøyaktighet Feilkilder: Tidsforsinkelse Multipath Målestøy Atmosfære: o Ionosfære: målestokksfeil (0 5 ppm) o Troposfære: Feil i høyde (cm dm) Feil i satellittkoordinater: o Målestokksfeil (< 0.25 ppm) Effekt på beregnede koordinater: m (horisontalt) 91
92 Multi-stasjons dgps Roveren mottar dgps-korreksjoner fra flere Basestasjoner. Økt integritet ved at de ulike basestasjonene kontrollerer hverandre. Økt nøyaktighet: Regner ut et vektet middel for dgps-korreksjonene til hver satellitt. Dekker ett større geografisk område med færre Baser Kommunikasjonslink over geostasjonære satellitt, GSM eller radio. 92
93 Wide Area Differential GPS (WADGPS) Nettverk av Basestasjoner. Ett beregningssenter parametriserer de skalare dgpskorreksjonene fra alle basestasjonene til: Feil i satellittkoordinater Feil i satellittklokke Ionosfære-korreksjon Brukeren (dvs. Roveren ) må selv omsette WADGPSparametrene til skalare dgps-korreksjoner) dgps-korreksjonene blir en funksjon av Roveren sine koordinater. 93
94 Nasjonal differensiell infrastruktur fra Statens Kartverk sitt SATREF system (kommersielt) Gir meters nøyaktighet Gir desimeters nøyaktighet Gir centimeters nøyaktighet 94
95 SBAS - Satellite Based Augmentation Systems- EGNOS (European Geostationary Navigation Overlay Service) WAAS (Wide Area Augmentation System), USA MSAS, Japan 95
96 EGNOS - funksjon - Sende GPS-likt signal (L1-frekvensen) fra tre geostasjonære satellitter. Dette vil øke antall tilgjengelige GPS satellitter for brukerne. Kringkasting av integritets informasjon. Kringkasting av differensielle korreksjoner. 96
97 EGNOS dekningsormråde AOR -E (15.5 W) IOR (65.5 E) Artemis (15 E)
98 Problemer for brukere av håndholdte mottakere i Norge De geostasjonære satellittene står svært lavt over horisonten i sør. I mange områder får en ikke tilgang til EGNOS signalene. Ionosfæremodellen i EGNOS-systemet har dårlig oppløsning i nordområdene (Figur hentet fra RTCA-dokumentet) 98
99 Absolutt posisjonsbestemmelse presist alternativt?? Navigasjonsløsning SA-effekten slått av 2.mai, 2000, horisontal nøyaktighet ca m Presis absolutt posisjonsbestemmelse Bruker presise satellittkoordinater og satellittklokkekorreksjoner, for eksempel fra IGS Nøyaktighet 0.01 m 1 m 99
100 Presis absolutt posisjonsbestemmelse Implementering i GPSPROG Utgangspunkt: Standard Navigation Solution Viktige modifikasjoner: Kan bruke presise efemerider, satellittklokke korreksjoner, GIM-ionosfæremodeller SP3 format RINEX-Clock format IONEX format Kan bruke to-frekvente observasjoner Kan bruke fase som observasjonsstørrelse Identifisere fasebrudd Estimere flertydigheter 100
101 Målinger i Vesterålfjorden M/S H.U. Sverdrup II 101
102 GPS mottakere på M/S H.U.Sverdrup II Javad Legacy 24 sat. GPS+Glonass L 1 /L 2 kode + fase Leica MC sat. GPS L 1 /L 2 kode + fase Trimble 4000 SSE 9 sat. GPS L 1 /L 2 kode + fase 102
103 Resultat Kinematisk posisjonsbestemmelse % of observations GPSPROG (Javad receiver) compared to reference system 95% of deviations within m (statistics based on position comparisons) Horizontal radial deviation [m] 103
104 Resultat: Største og midlere avvik Type løsning Største Midlere GPSPROG-Javad m m GPSPROG-Leica m m Fugro Starfix Real-time m m Javad Abs Real-time m m Trimble Abs Real-time m m 104
105 Presis absolutt posisjonsbestemmelse -Sanntidssystem- Pilot prosjekt ved JPL, USA Kommersielt system ved NAVCOM Inc, USA 105
106 Presis absolutt posisjonsbestemmelse - Statiske målinger Gir cm-nøyaktighet ved lange måletider (24 timer) Krever spesiell programvare, f.eks. GIPSY, Bernese GPS Software AutoGipsy (gratis beregningstjeneste), 106
107 Presis absolutt posisjonsbestemmelse Fordeler Trenger ikke referansemottakere (logistikk) Lavere kostnader, nødvendige data er fritt tilgjengelig (enn så lenge...) Ulemper Ikke mulig å fiksere flertydighetene til faseobservasjonene, trenger derfor lang tid med kontinuerlige data for å få høy nøyaktighet (bedre enn 0.1 m. 107
108 Presis absolutt posisjonsbestemmelse i AK06, Dag 073_ nøyaktighet som funksjon av måletid- 108
109 Differensiell prosessering av observasjoner fra billige håndholdte GPS-mottakere - fattigmanns-gps - Bakgrunn ION GPS 99 : RINGO fra Universitetet i Notinghamn. async / gar2rnx : freeware Erfaringer fra NLH 0-baselinje : Faseobservasjonene har nøyaktighetspotensiale på m 0.01 m Faseflertydigheter og fasebrudd med oppløsning på halvebølgelengder. Krevende å prosessere dobbeldifferanser. Beregning med bruk av trippeldifferanser viser seg å være robust og å gi nøyaktighet i dm-området. 109
110 Design med 0-baselinje 110
111 Analyse av kode- og faseobservasjonenes nøyaktighet fra Garmin 12 σ 0 = 1 σ 2 DD STDEV L1 (fix) C1 Noise σ Site = σ 2 Tot σ 2 Noise Total Site
112 Tilgang til GPS-observasjonsfiler over Internett. (i RINEX-format) Globalt Regionalt 112
113 Analyse av nøyaktighet ved bruk av faseobservasjoner fra Garmin 12 (Dag 063_2004) 2.5 timer med observasjoner i hvert punkt. Beregnet i bolker som hver er på 15 minutter 113
114 Analyse av nøyaktighet ved bruk av faseobservasjoner fra Garmin 12 (Dag 064_2004) 2.5 timer med observasjoner i hvert punkt. Beregnet i bolker som hver er på 15 minutter 114
115 Analyse av nøyaktighet ved bruk av faseobservasjoner fra Garmin 12 Referansemottaker 24 km unna Beregnet i 15 minutters bolker. 115
116 Analyse av nøyaktighet ved bruk av faseobservasjoner fra Garmin 12 Referansemottaker 0.3 km og 24 km unna. Beregnet i 5 minutters bolker. 116
117 Gratis internett tenester for etterprosessering av GPS observasjonsfiler i RINEX-format SOPAC The Scripps Orbit and Permanent Array Centre AUSPOS AUTO GIPSY e-post til ag@cobra.jpl.nasa.gov med Static som emne og URL-adressen til RINEX-filen 117
118 Nøyaktighet ved bruk av gratis -tenester Kilde: Jon Fougner, Fugro Survey AS, 2002 Observasjonstid SOPAC og AUSLIG Auto GIPSY Horisontalt Vertikalt Horisontalt Vertikalt 1 time <100 mm <100 mm < 100 mm < 100 mm 2 timer 20 mm 40 mm 20 mm 40 mm 4 timer 15 mm 30 mm 10 mm 20 mm 6-12 timer 10 mm 20mm 5mm 10mm Koordinater i ITRF2000 ved måletidspunktet, må selv transformere til for eksempel EUREF89 eller NGO
119 Sanntids-tjenester - private, kommersielle tjenester - FUGRO Seastar / OMNISTAR : desimeter - tjeneste og meter -tjeneste Kringkasting av korreksjonsdata over geostasjonære satellitter 119
120 Eksempel på priser OmniSTAR Signal Leie Artikkel Hvor Timer (**) Måned 1 år 2 år EU-OMNI Innen Europa 55, , , ,- RE-OMNI Regionalt ( *) 35, , , ,- AG-OMNI Agri lisens 30, , , ,- AIR- OMNI Air- lisens 6 000, ,- ** Det fordrer et minimum uttak av 150 timer på 8 måneder, eks. MVA. 120
121 Det var det 121
Forelesning i SIB6005 Geomatikk, 16.9.2002. GPS: Metode for koordinatbestemmelse. Kapittel 8 i Grunnleggende landmåling
 Forelesning i SIB6005 Geomatikk, 16.9.2002 1 Geodesi/landmåling. 16.9 DAGENS TEMA: GPS: Metode for koordinatbestemmelse Fasemålinger Relativ måling Feilkilder Planlegging Kapittel 8 i Grunnleggende landmåling
Forelesning i SIB6005 Geomatikk, 16.9.2002 1 Geodesi/landmåling. 16.9 DAGENS TEMA: GPS: Metode for koordinatbestemmelse Fasemålinger Relativ måling Feilkilder Planlegging Kapittel 8 i Grunnleggende landmåling
Forelesning i SIB6005 Geomatikk, 9.9.2002. GPS: Metode for koordinatbestemmelse System Mottakere Kodemålinger Fasemålinger
 Forelesning i SIB6005 Geomatikk, 9.9.2002 1 DAGENS TEMA: GPS: Metode for koordinatbestemmelse System Mottakere Kodemålinger Fasemålinger Kapittel 8 i Grunnleggende landmåling Øving nr 1: Innlevering: Siste
Forelesning i SIB6005 Geomatikk, 9.9.2002 1 DAGENS TEMA: GPS: Metode for koordinatbestemmelse System Mottakere Kodemålinger Fasemålinger Kapittel 8 i Grunnleggende landmåling Øving nr 1: Innlevering: Siste
Satellittbasert posisjonsbestemmelse
 GeoNorge 2004 6. mai 2004 Rainbow hotel Arena, Lillestrøm Satellittbasert posisjonsbestemmelse v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/at/geomatikk/
GeoNorge 2004 6. mai 2004 Rainbow hotel Arena, Lillestrøm Satellittbasert posisjonsbestemmelse v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/at/geomatikk/
Instrumentnyheter og vurderinger
 Instrumentnyheter og vurderinger - Satellittbaserte systemer - Landbaserte systemer Nito s Kart og Oppmålingskonferanse Gardermoen, 4. des. 2006 v/ Bjørn Godager, HiG bjoern.godager@hig.no www.hig.no/geomatikk
Instrumentnyheter og vurderinger - Satellittbaserte systemer - Landbaserte systemer Nito s Kart og Oppmålingskonferanse Gardermoen, 4. des. 2006 v/ Bjørn Godager, HiG bjoern.godager@hig.no www.hig.no/geomatikk
PRODUKTBESKRIVELSE OG BRUKERVEILEDNING
 PRODUKTBESKRIVELSE OG BRUKERVEILEDNING TopNET Live er en landsdekkende posisjonstjeneste der du kan bestemme posisjonen din med nøyaktighet på centimeternivå uten bruk av egen basestasjon. Hva du kan forvente
PRODUKTBESKRIVELSE OG BRUKERVEILEDNING TopNET Live er en landsdekkende posisjonstjeneste der du kan bestemme posisjonen din med nøyaktighet på centimeternivå uten bruk av egen basestasjon. Hva du kan forvente
Ytelsemonitorering av Galileo
 Ytelsemonitorering av Galileo Anders Solberg, Kartverket Geodesi Geodesi- og hydrografidagene 2017. 15.-16. november, Sundvollen. Innhold 1. Kort systemstatus for Galileo 2. Motivasjon (Hvorfor?) 3. Metodikk
Ytelsemonitorering av Galileo Anders Solberg, Kartverket Geodesi Geodesi- og hydrografidagene 2017. 15.-16. november, Sundvollen. Innhold 1. Kort systemstatus for Galileo 2. Motivasjon (Hvorfor?) 3. Metodikk
GNSS-posisjonering av kjøretøy i fart. Kenneth Bahr, GNSS Utvikling, Geodesidivisjonen, Kartverket
 GNSS-posisjonering av kjøretøy i fart Kenneth Bahr, GNSS Utvikling, Geodesidivisjonen, Kartverket Forprosjekt «GNSS-posisjonering av kjøretøy i fart» Felles målsetninger med forprosjektet: - Forstå framtidige
GNSS-posisjonering av kjøretøy i fart Kenneth Bahr, GNSS Utvikling, Geodesidivisjonen, Kartverket Forprosjekt «GNSS-posisjonering av kjøretøy i fart» Felles målsetninger med forprosjektet: - Forstå framtidige
Erfaringer ved RTK-måling på lange avstander
 Jordskifteverkets samling på Honne, 12.-13. Mai 2004 Erfaringer ved RTK-måling på lange avstander v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/at/geomatikk/
Jordskifteverkets samling på Honne, 12.-13. Mai 2004 Erfaringer ved RTK-måling på lange avstander v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/at/geomatikk/
Masteroppgaver, geodesi - landmåling. Her er oversikt over noen mastergradsmuligheter i geodesi landmåling:
 Masteroppgaver, geodesi - landmåling Her er oversikt over noen mastergradsmuligheter i geodesi landmåling: Nasjonal/Regional/Lokal ionosfæretjeneste Benytte observasjoner fra permanente GPS stasjoner til
Masteroppgaver, geodesi - landmåling Her er oversikt over noen mastergradsmuligheter i geodesi landmåling: Nasjonal/Regional/Lokal ionosfæretjeneste Benytte observasjoner fra permanente GPS stasjoner til
Lag (tegn) ditt forslag på en observasjonsplan for de GPS-vektorene du vil måle:
 ditt forslag på en observasjonsplan for de GPS-vektorene du vil måle:") Geomatikk, 00 Oppgave GPS (a) Generelt: Hovedprinsipper som er med å bestemme hvilke vektorer som du velger å måle: Se pensum. Stikkord er nett av trekanter og firkanter, også måle mellom kjentpunktene
Geomatikk, 00 Oppgave GPS (a) Generelt: Hovedprinsipper som er med å bestemme hvilke vektorer som du velger å måle: Se pensum. Stikkord er nett av trekanter og firkanter, også måle mellom kjentpunktene
Fremtidens referanserammer. Per Chr. Bratheim
 Fremtidens referanserammer Per Chr. Bratheim Nasjonal geodatastrategi 1.4 Samfunnet har hensiktsmessige referanserammer for stedfesting Nøyaktige navigasjons- og posisjonstjenester blir stadig viktigere
Fremtidens referanserammer Per Chr. Bratheim Nasjonal geodatastrategi 1.4 Samfunnet har hensiktsmessige referanserammer for stedfesting Nøyaktige navigasjons- og posisjonstjenester blir stadig viktigere
RTK-pålitelighet og erfaringer
 Lokale kartdager, Østfold, Vestfold og Telemark 15.-16. Oktober 2003 Quality hotel og badeland, Sarpsborg RTK-pålitelighet og erfaringer v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no
Lokale kartdager, Østfold, Vestfold og Telemark 15.-16. Oktober 2003 Quality hotel og badeland, Sarpsborg RTK-pålitelighet og erfaringer v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no
Galileo Nå er det her!
 Galileo Nå er det her! Anders Solberg, Kartverket Geodesi Geodesi- og hydrografidagene 2018. 21.-22. november, Sola. Utklipp fra forsiden av Galileo-OS-SIS-ICD Innhold 1. Kort systemstatus for Galileo
Galileo Nå er det her! Anders Solberg, Kartverket Geodesi Geodesi- og hydrografidagene 2018. 21.-22. november, Sola. Utklipp fra forsiden av Galileo-OS-SIS-ICD Innhold 1. Kort systemstatus for Galileo
PPP - Test av online tjenester. Precise point positioning - online processing. Halvor Vadder
 PPP - Test av online tjenester Precise point positioning - online processing Halvor Vadder services Institutt for Matematiske realfag og teknologi Masteroppgave 30 stp 2012 Forord Med denne oppgaven avslutter
PPP - Test av online tjenester Precise point positioning - online processing Halvor Vadder services Institutt for Matematiske realfag og teknologi Masteroppgave 30 stp 2012 Forord Med denne oppgaven avslutter
Utvikling av robust og nøyaktig satellittposisjonering på skip
 Utvikling av robust og nøyaktig satellittposisjonering på skip Norvald Kjerstad Professor, Nautical Science Norwegian University of Science and Technology Norvald.kjerstad@ntnu.no Tlf. +47 975 43980 Himmel
Utvikling av robust og nøyaktig satellittposisjonering på skip Norvald Kjerstad Professor, Nautical Science Norwegian University of Science and Technology Norvald.kjerstad@ntnu.no Tlf. +47 975 43980 Himmel
Ionosfæremodeller for en-frekvente brukere av GPS og Galileo
 Ionosfæremodeller for en-frekvente brukere av GPS og Galileo Yngvild L. Andalsvik og Knut S. Jacobsen Geodesi- og hydrografidagene 2017, Sundvolden Photo:OHB Innhold En-frekvente brukere Romvær og ionosfæriske
Ionosfæremodeller for en-frekvente brukere av GPS og Galileo Yngvild L. Andalsvik og Knut S. Jacobsen Geodesi- og hydrografidagene 2017, Sundvolden Photo:OHB Innhold En-frekvente brukere Romvær og ionosfæriske
Innleveringsoppgave 4 GNSS Satellittmåling Lars Sletten. Innholdsfortegnelse, GNSS teori.
 Innleveringsoppgave 4 GNSS Satellittmåling Lars Sletten. Innholdsfortegnelse, GNSS teori. Emne Side Innledning. 3. GNSS. 3. GPS beskrivelse. 4. Kjernedata for GPS systemet. 5. o Romsegmentet. 5. o Kontrollsegmentet.
Innleveringsoppgave 4 GNSS Satellittmåling Lars Sletten. Innholdsfortegnelse, GNSS teori. Emne Side Innledning. 3. GNSS. 3. GPS beskrivelse. 4. Kjernedata for GPS systemet. 5. o Romsegmentet. 5. o Kontrollsegmentet.
 Sammendrag Denne oppgaven tar utgangspunkt i Statens Kartverk sitt ønske om en vurdering av sin posisjoneringstjeneste CPOS. Det har blitt undersøkt om hvorvidt kvaliteten på målingen har sammenheng med
Sammendrag Denne oppgaven tar utgangspunkt i Statens Kartverk sitt ønske om en vurdering av sin posisjoneringstjeneste CPOS. Det har blitt undersøkt om hvorvidt kvaliteten på målingen har sammenheng med
Pågående GPS-forskning ved HiG
 Vitenskapsforum 5. desember 2003 Høgskolen i Gjøvik Pågående GPS-forskning ved HiG v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/at/geomatikk/ Tlf: 61 13
Vitenskapsforum 5. desember 2003 Høgskolen i Gjøvik Pågående GPS-forskning ved HiG v/ Bjørn Godager,Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/at/geomatikk/ Tlf: 61 13
Rigg Posisjonering i nordområdene
 Rigg Posisjonering i nordområdene HMS utfordringer i nordområdene 24.-25.Mars 2014 Classification: Internal Statoil Rigg Posisjonering 2 Classification: Internal Hvem er vi? EXP EE GOP GRP Verifiserer
Rigg Posisjonering i nordområdene HMS utfordringer i nordområdene 24.-25.Mars 2014 Classification: Internal Statoil Rigg Posisjonering 2 Classification: Internal Hvem er vi? EXP EE GOP GRP Verifiserer
Posisjonstjenester i sanntid Referansestasjoner og tjenester
 Standarder geografisk informasjon - Posisjonstjenester i sanntid 1 Standarder geografisk informasjon Posisjonstjenester i sanntid Referansestasjoner og tjenester Versjon 1.0 november 2013 Standarder geografisk
Standarder geografisk informasjon - Posisjonstjenester i sanntid 1 Standarder geografisk informasjon Posisjonstjenester i sanntid Referansestasjoner og tjenester Versjon 1.0 november 2013 Standarder geografisk
Hver av oppgavene 1-3 teller likt dvs 1/3 hver. Oppgave 1: Fotogrammetri.
 Hver av oppgavene 1-3 teller likt dvs 1/3 hver. Oppgave 1: Fotogrammetri. a. Forklar forskjellen på sentralprojeksjon og ortogonalprojeksjon. Orthogonalprojeksjon er proj. Vinkelrett på flate (à la kartproj)
Hver av oppgavene 1-3 teller likt dvs 1/3 hver. Oppgave 1: Fotogrammetri. a. Forklar forskjellen på sentralprojeksjon og ortogonalprojeksjon. Orthogonalprojeksjon er proj. Vinkelrett på flate (à la kartproj)
Nye satellitter nye løsninger. Geodesi- og hydrografidagene, Stavanger, november 2016 Edgar Johansen, Kongsberg Seatex AS
 Nye satellitter nye løsninger Geodesi- og hydrografidagene, Stavanger, 16. 17. november 2016 Edgar Johansen, Kongsberg Seatex AS Emner Nye GNSS-satellitter Nye satellittsystemer Nye satellitter i eksisterende
Nye satellitter nye løsninger Geodesi- og hydrografidagene, Stavanger, 16. 17. november 2016 Edgar Johansen, Kongsberg Seatex AS Emner Nye GNSS-satellitter Nye satellittsystemer Nye satellitter i eksisterende
Galileo banemonitorering
 Galileo banemonitorering M. Dähnn, G. A. Hjelle, A.-S. Kirkvik, I. Fausk, M. Ouassou, A. M. Solberg Geodesi- og hydrografidagene, Stavanger, 21. November 2018 Del I Bakgrunn Galileo utvikling Full Operational
Galileo banemonitorering M. Dähnn, G. A. Hjelle, A.-S. Kirkvik, I. Fausk, M. Ouassou, A. M. Solberg Geodesi- og hydrografidagene, Stavanger, 21. November 2018 Del I Bakgrunn Galileo utvikling Full Operational
Navigasjon og nødvarsling
 Navigasjon og nødvarsling Systemytelse i Nordområdene Steinar Thomsen Seksjonssjef satelli2navigasjon steinar.thomsen@spacecentre.no Agenda! Satelli2navigasjon grunnkurs! Galileo og EGNOS! Behov og u?ordringer!
Navigasjon og nødvarsling Systemytelse i Nordområdene Steinar Thomsen Seksjonssjef satelli2navigasjon steinar.thomsen@spacecentre.no Agenda! Satelli2navigasjon grunnkurs! Galileo og EGNOS! Behov og u?ordringer!
EGNOS Oppdrag Hurtigruten
 EGNOS Oppdrag Hurtigruten Anders Solberg, Kartverket Geodesi Geodesi- og hydrografidagene 2016, 16.-17. november, Sola FOTO: SNORRE E. ASKE / WWW.HURTIGRUTEN.NO Kort om EGNOS EGNOS er en regional europeisk
EGNOS Oppdrag Hurtigruten Anders Solberg, Kartverket Geodesi Geodesi- og hydrografidagene 2016, 16.-17. november, Sola FOTO: SNORRE E. ASKE / WWW.HURTIGRUTEN.NO Kort om EGNOS EGNOS er en regional europeisk
Innføring av nye satellittsystemer i Kartverket. Geodesi- og hydrografidagene 2016 Tor-Ole Dahlø, Geodesidivisjonen
 Innføring av nye satellittsystemer i Kartverket Geodesi- og hydrografidagene 2016 Tor-Ole Dahlø, Geodesidivisjonen Oversikt Litt om SATREF Kartverkets tjenester Aktuelle nye satellittsystemer inn i SATREF/CPOS
Innføring av nye satellittsystemer i Kartverket Geodesi- og hydrografidagene 2016 Tor-Ole Dahlø, Geodesidivisjonen Oversikt Litt om SATREF Kartverkets tjenester Aktuelle nye satellittsystemer inn i SATREF/CPOS
Geodesidesi- og hydrografidagene november RTK-pålitelighet og erfaringer
 Geodesidesi- og hydrografidagene 14.-15. november RTK-pålitelighet og erfaringer v/ Bjørn Godager, Høgskolen i Gjøvik Email: bjoern.godager@hig.no Geomatikkgruppas hjemmeside (vår): http://www.hig.no/at/geomatikk/
Geodesidesi- og hydrografidagene 14.-15. november RTK-pålitelighet og erfaringer v/ Bjørn Godager, Høgskolen i Gjøvik Email: bjoern.godager@hig.no Geomatikkgruppas hjemmeside (vår): http://www.hig.no/at/geomatikk/
En sammenligning av CPOS og tradisjonell RTK
 En sammenligning av CPOS og tradisjonell RTK Statens kartverk Geodesidivisjonen Per Erik Opseth Fagansvarlig SATREF Innhold Status for CPOS Hvordan fungerer CPOS? CPOS versus tradisjonell RTK, praktiske
En sammenligning av CPOS og tradisjonell RTK Statens kartverk Geodesidivisjonen Per Erik Opseth Fagansvarlig SATREF Innhold Status for CPOS Hvordan fungerer CPOS? CPOS versus tradisjonell RTK, praktiske
Bruk av tre eller flere frekvenser i Galileo og/eller GPS for cmnøyaktighet
 Bruk av tre eller flere frekvenser i Galileo og/eller GPS for cmnøyaktighet Audun Klokkerhaug Master i elektronikk Oppgaven levert: Januar 2008 Hovedveileder: Børje Forssell, IET Norges teknisk-naturvitenskapelige
Bruk av tre eller flere frekvenser i Galileo og/eller GPS for cmnøyaktighet Audun Klokkerhaug Master i elektronikk Oppgaven levert: Januar 2008 Hovedveileder: Børje Forssell, IET Norges teknisk-naturvitenskapelige
Lytt til Kvasarer og Skyt Satellitter med Laser
 Lytt til Kvasarer og Skyt Satellitter med Laser Geir Arne Hjelle FOSS4G Norge, 18. Oktober 2018 Part I Hvorfor? Problemet Problemet Problemet Problemet Problemet Problemet Problemet Problemet Løsningen
Lytt til Kvasarer og Skyt Satellitter med Laser Geir Arne Hjelle FOSS4G Norge, 18. Oktober 2018 Part I Hvorfor? Problemet Problemet Problemet Problemet Problemet Problemet Problemet Problemet Løsningen
System 1200 nyhetsbrev Nr. 52 RTK-nettverk En innledning
 RTK-NETTVERK FRAMTIDENS LØSNING For ti år siden var det vanligst å bruke to GPSmottakere (en base og en rover) til RTK-måling. I tillegg måtte man ha med seg en mengde batterier og kabler, to radioer,
RTK-NETTVERK FRAMTIDENS LØSNING For ti år siden var det vanligst å bruke to GPSmottakere (en base og en rover) til RTK-måling. I tillegg måtte man ha med seg en mengde batterier og kabler, to radioer,
Jordskifterettenes erfaringer med bruk av 4 satellittsystemer
 es erfaringer med bruk av 4 satellittsystemer Lokale geomatikkdager Hedmark og Oppland 2019 Morten Strand 1 Tema Kort introduksjon til teknisk arbeid i jordskifterettene og vår bruk av RTK GNSS Testresultater
es erfaringer med bruk av 4 satellittsystemer Lokale geomatikkdager Hedmark og Oppland 2019 Morten Strand 1 Tema Kort introduksjon til teknisk arbeid i jordskifterettene og vår bruk av RTK GNSS Testresultater
Test av ny/forbedret CPOS tjeneste
 Bacheloroppgave: Test av ny/forbedret CPOS tjeneste Høgskolen i Gjøvik Avdeling for Teknologi, Økonomi og Ledelse Bachelor i Geomatikk, våren 2013 Forfattere: Rune Svarva og Bjørn Inge Holter Dato:14.05.2013
Bacheloroppgave: Test av ny/forbedret CPOS tjeneste Høgskolen i Gjøvik Avdeling for Teknologi, Økonomi og Ledelse Bachelor i Geomatikk, våren 2013 Forfattere: Rune Svarva og Bjørn Inge Holter Dato:14.05.2013
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: GEG2210 Eksamensdag: 8. juni 2009 Tid for eksamen: 3 timer Oppgavesettet er på 4 sider + 1 side vedlegg, totalt 5 sider Vedlegg:
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: GEG2210 Eksamensdag: 8. juni 2009 Tid for eksamen: 3 timer Oppgavesettet er på 4 sider + 1 side vedlegg, totalt 5 sider Vedlegg:
Øving 2: GPS, planlegging. Transformasjoner.
 INSTITUTT FOR GEOMATIKK NTNU 1 Ut: 11.9 Inn: 25.9 SIB6005 Geomatikk. Høsten 2002 Øving 2: GPS, planlegging. Transformasjoner. Deloppgaver: Versjon nr 2, noen endringer i bruksanvisning etter første gangs
INSTITUTT FOR GEOMATIKK NTNU 1 Ut: 11.9 Inn: 25.9 SIB6005 Geomatikk. Høsten 2002 Øving 2: GPS, planlegging. Transformasjoner. Deloppgaver: Versjon nr 2, noen endringer i bruksanvisning etter første gangs
Utfordringer med EUREF
 Utfordringer med EUREF v/ Bjørn Godager, Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/geomatikk/ Tlf: 61 13 52 75 41 25 24 68 Temaer Innledning/ bakgrunn/ temaer i foredraget
Utfordringer med EUREF v/ Bjørn Godager, Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/geomatikk/ Tlf: 61 13 52 75 41 25 24 68 Temaer Innledning/ bakgrunn/ temaer i foredraget
Innendørs GNSS ytelse og utfordringer. Jon Glenn Gjevestad Institutt for matematiske realfag og teknologi, UMB
 Innendørs GNSS ytelse og utfordringer Jon Glenn Gjevestad Institutt for matematiske realfag og teknologi, UMB Agenda Mobiltelefon (E911/E112) Kodemåling på svake signaler Multipath High Sensitivity GPS
Innendørs GNSS ytelse og utfordringer Jon Glenn Gjevestad Institutt for matematiske realfag og teknologi, UMB Agenda Mobiltelefon (E911/E112) Kodemåling på svake signaler Multipath High Sensitivity GPS
SATELLITTBASERT POSISJONSBESTEMMELSE. Versjon 2.1 - Desember 2009
 Dokument tittel: Satellittbasert posisjonsbestemmelse Side 1 av 60 SATELLITTBASERT POSISJONSBESTEMMELSE Versjon 2.1 - Desember 2009 Henvendelser kan rettes til: Statens kartverk Geodesi Besøksadresse:
Dokument tittel: Satellittbasert posisjonsbestemmelse Side 1 av 60 SATELLITTBASERT POSISJONSBESTEMMELSE Versjon 2.1 - Desember 2009 Henvendelser kan rettes til: Statens kartverk Geodesi Besøksadresse:
NN2000 og litt til. Per Chr. Bratheim Geoforum Sogn og Fjordane 2016
 NN2000 og litt til Per Chr. Bratheim Geoforum Sogn og Fjordane 2016 Høydesystemer litt repetisjon Høyde over ellipsoiden (ellipsoidisk høyde): Måling med GNSS gir oss ellipsoidiske høyder. Dette høydesystemet
NN2000 og litt til Per Chr. Bratheim Geoforum Sogn og Fjordane 2016 Høydesystemer litt repetisjon Høyde over ellipsoiden (ellipsoidisk høyde): Måling med GNSS gir oss ellipsoidiske høyder. Dette høydesystemet
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Side 1 Eksamen i: GEG2210 Eksamensdag: 9. juni 2006 Tid for eksamen: 1430 1730 (3 timer) Oppgavesettet er på 3 sider Vedlegg: 2 vedlegg
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Side 1 Eksamen i: GEG2210 Eksamensdag: 9. juni 2006 Tid for eksamen: 1430 1730 (3 timer) Oppgavesettet er på 3 sider Vedlegg: 2 vedlegg
Nettbrett og mobiltelefon med ekstern GNSS
 Nettbrett og mobiltelefon med ekstern GNSS Nye muligheter Geodesi- og hydrografidagene 2015 - Erik Karlsen, Norgeodesi AS Hva skal jeg snakke om? Nettbrett/telefon til feltoppgaver Ekstern GNSS for tredjeparts
Nettbrett og mobiltelefon med ekstern GNSS Nye muligheter Geodesi- og hydrografidagene 2015 - Erik Karlsen, Norgeodesi AS Hva skal jeg snakke om? Nettbrett/telefon til feltoppgaver Ekstern GNSS for tredjeparts
System 1200 nyhetsbrev Nr. 53 RTK-nettverk Forskjellige metoder
 RTK-NETTVERK FORSKJELLIGE METODER Dette nyhetsbrevet evaluerer fire forskjellige nettverksbaserte RTK-metoder: MAX, i-max, FKP og virtuell referansestasjon VRS (CPOS). Det er vesentlige forskjeller mellom
RTK-NETTVERK FORSKJELLIGE METODER Dette nyhetsbrevet evaluerer fire forskjellige nettverksbaserte RTK-metoder: MAX, i-max, FKP og virtuell referansestasjon VRS (CPOS). Det er vesentlige forskjeller mellom
Krav til måletid for eiendomsmålinger med CPOS - rett kvalitet til rett tid Geodesi- og hydrografidagene 2016 Halvard Teigland og Morten Strand DA
 Krav til måletid for eiendomsmålinger med CPOS - rett kvalitet til rett tid Geodesi- og hydrografidagene 2016 Halvard Teigland og Morten Strand DA 1 "Regelverket" for eiendomsmåling Standarder Stedfesting
Krav til måletid for eiendomsmålinger med CPOS - rett kvalitet til rett tid Geodesi- og hydrografidagene 2016 Halvard Teigland og Morten Strand DA 1 "Regelverket" for eiendomsmåling Standarder Stedfesting
KLASSISK STATISK -ETTERPROSESSERING MED PINNACLE.
 KLASSISK STATISK -ETTERPROSESSERING MED PINNACLE. BRUKERVEILEDNING FRA BLINKEN AS OPPDATERT PR.30.01.2001 GPS/GLONASS Måleteknikker... 3 Statiske målinger... 3 Klassisk statisk... 3 Korttids statisk...
KLASSISK STATISK -ETTERPROSESSERING MED PINNACLE. BRUKERVEILEDNING FRA BLINKEN AS OPPDATERT PR.30.01.2001 GPS/GLONASS Måleteknikker... 3 Statiske målinger... 3 Klassisk statisk... 3 Korttids statisk...
&INTNU. Analyse av posisjonsdata fra GNSSmottakere. Eirik Oppedal. Kunnskap for en bedre verden
 &INTNU Kunnskap for en bedre verden Analyse av posisjonsdata fra GNSSmottakere på kjøretøy Eirik Oppedal Master i ingeniørvitenskap og IKT Innlevert: juni 2018 Hovedveileder: Hossein Nahavandchi, IBM Medveileder:
&INTNU Kunnskap for en bedre verden Analyse av posisjonsdata fra GNSSmottakere på kjøretøy Eirik Oppedal Master i ingeniørvitenskap og IKT Innlevert: juni 2018 Hovedveileder: Hossein Nahavandchi, IBM Medveileder:
LANDMÅLINGS RAPPORT Rindal 2002
 Statens kartverk Møre og Romsdal LANDMÅLINGS RAPPORT Rindal 2002 Desember 2002 INNHOLD 1. GENERELT...3 1.1 Oppdragsgiver...3 1.2 Oppdragets nummer og navn...3 1.3 Underleverandører...3 1.4 Lagring av data...3
Statens kartverk Møre og Romsdal LANDMÅLINGS RAPPORT Rindal 2002 Desember 2002 INNHOLD 1. GENERELT...3 1.1 Oppdragsgiver...3 1.2 Oppdragets nummer og navn...3 1.3 Underleverandører...3 1.4 Lagring av data...3
Utfordringer med posisjonering i C-ITS.
 Utfordringer med posisjonering i C-ITS Tomas.Levin@vegvesen.no Trond.Arve.Haakonsen@vegvesen.no C-ITS ETSI: Over recent years, the emphasis in intelligent vehicle research has turned to Cooperative ITS
Utfordringer med posisjonering i C-ITS Tomas.Levin@vegvesen.no Trond.Arve.Haakonsen@vegvesen.no C-ITS ETSI: Over recent years, the emphasis in intelligent vehicle research has turned to Cooperative ITS
Presisjonsmåling med standardutstyr
 Vitenskapelig bedømt (refereed) artikkel Inge Revhaug and Øyvind Grindheim: Precision surveying with standard instruments. KART OG PLAN, Vol 70, pp. 9 17, P.O.B. 5003, NO-1432 Ås, ISSN 0047-3278 Due to
Vitenskapelig bedømt (refereed) artikkel Inge Revhaug and Øyvind Grindheim: Precision surveying with standard instruments. KART OG PLAN, Vol 70, pp. 9 17, P.O.B. 5003, NO-1432 Ås, ISSN 0047-3278 Due to
Kartverket har i flere år forberedt overgangen fra NN1954 til NN2000, bl.a. ved fortetting av presisjonsnivellementsnettet Noen pilot-kommuner har
 NN2000 Fagdag Geoforum Oslo og Akershus Bakgrunn Kartverket har i flere år forberedt overgangen fra NN1954 til NN2000, bl.a. ved fortetting av presisjonsnivellementsnettet Noen pilot-kommuner har innført
NN2000 Fagdag Geoforum Oslo og Akershus Bakgrunn Kartverket har i flere år forberedt overgangen fra NN1954 til NN2000, bl.a. ved fortetting av presisjonsnivellementsnettet Noen pilot-kommuner har innført
Landmålings rapport. Koordinat system (Jobb) System Sone Datum Projeksjon. Opprinnelig long 15 00' "E
 System Sone Datum Projeksjon. Opprinnelig long 15 00' E") Landmålings rapport Jobb navn 74.bbygg.asb opprettet 18 Oct 201 Versjon Trimble General Survey 2.90 Avstands enhet Meter Vinkel enheter Grader Trykk enheter mbar Temperatur enheter Celsius Koordinat system
Landmålings rapport Jobb navn 74.bbygg.asb opprettet 18 Oct 201 Versjon Trimble General Survey 2.90 Avstands enhet Meter Vinkel enheter Grader Trykk enheter mbar Temperatur enheter Celsius Koordinat system
SIB6005 Geomatikk, høsten 2002. Øving 4, del B. Elementmetoden: Koordinat- og høydeberegninger. SIB6005 Geomatikk, 2002. Øving 4.A
 WWW.GEOMATIKK.NTNU.NO 1 Ut: 28.10 Inn: Sammen med 4A og 4C, 22.11 SIB6005 Geomatikk, høsten 2002. Øving 4, del B Elementmetoden: Koordinat- og høydeberegninger SIB6005 Geomatikk, 2002. Øving 4.A Etter
WWW.GEOMATIKK.NTNU.NO 1 Ut: 28.10 Inn: Sammen med 4A og 4C, 22.11 SIB6005 Geomatikk, høsten 2002. Øving 4, del B Elementmetoden: Koordinat- og høydeberegninger SIB6005 Geomatikk, 2002. Øving 4.A Etter
Veiledning i hvordan registrere punkter med Leica SR20 for senere etterprosessering mot korreksjonsdata registrert med SR20
 NavSys as Fjellhamarveien 46 N1472 Fjellhamar Tlf: 67 91 16 50 www.navsys.no navsys@navsys.no Forfatter: Nils Barkald Dato:27.10.2006 Veiledning i hvordan registrere punkter med Leica SR20 for senere etterprosessering
NavSys as Fjellhamarveien 46 N1472 Fjellhamar Tlf: 67 91 16 50 www.navsys.no navsys@navsys.no Forfatter: Nils Barkald Dato:27.10.2006 Veiledning i hvordan registrere punkter med Leica SR20 for senere etterprosessering
PPP - Test av online tjenester. Precise point positioning - online processing. Halvor Vadder
 PPP - Test av online tjenester Precise point positioning - online processing Halvor Vadder services Institutt for Matematiske realfag og teknologi Masteroppgave 30 stp 2012 Forord Med denne oppgaven avslutter
PPP - Test av online tjenester Precise point positioning - online processing Halvor Vadder services Institutt for Matematiske realfag og teknologi Masteroppgave 30 stp 2012 Forord Med denne oppgaven avslutter
Lokalisering Nokia N76-1
 Nokia N76-1 2007 Nokia. Alle rettigheter forbeholdt. Nokia, Nokia Connecting People, Nseries og N76 er varemerker eller registrerte varemerker for Nokia Corporation. Andre produkt eller firmanavn som nevnes
Nokia N76-1 2007 Nokia. Alle rettigheter forbeholdt. Nokia, Nokia Connecting People, Nseries og N76 er varemerker eller registrerte varemerker for Nokia Corporation. Andre produkt eller firmanavn som nevnes
Erik Sørngård, FoU-leder, Gundersen & Løken AS
 Erik Sørngård, FoU-leder, Gundersen & Løken AS Nordfjord 2017 Ny Komatsu gravemaskin Eldre rover, ommontert maskinstyring Mistet halvparten av satellittene og RTK-fiks når motoren gikk DAB-radioen mistet
Erik Sørngård, FoU-leder, Gundersen & Løken AS Nordfjord 2017 Ny Komatsu gravemaskin Eldre rover, ommontert maskinstyring Mistet halvparten av satellittene og RTK-fiks når motoren gikk DAB-radioen mistet
Foredragsholder: Geir Andersen, Vianova Systems AS
 Foredrag A 9: Transformasjon Foredragsholder: Geir Andersen, Vianova Systems AS 8. 10. mai 2007 2:15 Tema 1: Transformasjon av prosjektdata Tema 2: Målestokksvariasjoner i UTM Euref89 3:15 Transformasjon
Foredrag A 9: Transformasjon Foredragsholder: Geir Andersen, Vianova Systems AS 8. 10. mai 2007 2:15 Tema 1: Transformasjon av prosjektdata Tema 2: Målestokksvariasjoner i UTM Euref89 3:15 Transformasjon
&INTNU. Transformasjon fra global referanseramme til nasjonal referanseramme EUREF89. Adrian Tuft Isdahl. Kunnskap for en bedre verden
 &INTNU Kunnskap for en bedre verden Transformasjon fra global referanseramme til nasjonal referanseramme EUREF89 Adrian Tuft Isdahl Master i ingeniørvitenskap og IKT Innlevert: juni 2018 Hovedveileder:
&INTNU Kunnskap for en bedre verden Transformasjon fra global referanseramme til nasjonal referanseramme EUREF89 Adrian Tuft Isdahl Master i ingeniørvitenskap og IKT Innlevert: juni 2018 Hovedveileder:
Kontinuerlig GPS ved vannstandsmålere
 Kontinuerlig GPS ved vannstandsmålere Arne E. Ofstad og Oddgeir Kristiansen Statens kartverk Innledning I løpet av de siste årtier er det blitt stadig tydeligere at menneskelig aktivitet påvirker utviklingen
Kontinuerlig GPS ved vannstandsmålere Arne E. Ofstad og Oddgeir Kristiansen Statens kartverk Innledning I løpet av de siste årtier er det blitt stadig tydeligere at menneskelig aktivitet påvirker utviklingen
Forbedring av navigasjonsløsning i tunneler
 1 2 3 4 5 Forbedring av navigasjonsløsning i tunneler Ingrid Johnsbråten Geodesi -og Hydrografidagene 2015 Sundvolden, 18.-19.november Lysbilde 1 5 Med DEM! Ingrid Johnsbråten; 4 Uten DEM! Ingrid Johnsbråten;
1 2 3 4 5 Forbedring av navigasjonsløsning i tunneler Ingrid Johnsbråten Geodesi -og Hydrografidagene 2015 Sundvolden, 18.-19.november Lysbilde 1 5 Med DEM! Ingrid Johnsbråten; 4 Uten DEM! Ingrid Johnsbråten;
Konkurransegrunnlag Del B kravspesifikasjon. Håndholdte GNSS GIS enheter for registrering til NVDB og FKB
 Konkurransegrunnlag Del B kravspesifikasjon Håndholdte GNSS GIS enheter for registrering til NVDB og FKB Dokumentets dato: 13. mai 2011 Saksnummer: 2011065872 B.1. Kravspesifikasjon B.1.1. Beskrivelse
Konkurransegrunnlag Del B kravspesifikasjon Håndholdte GNSS GIS enheter for registrering til NVDB og FKB Dokumentets dato: 13. mai 2011 Saksnummer: 2011065872 B.1. Kravspesifikasjon B.1.1. Beskrivelse
TITTEL Etablering av fastmerker med statiske målinger til Kartverkets permanente geodetiske basestasjoner.
 BACHELOROPPGAVE: TITTEL Etablering av fastmerker med statiske målinger til Kartverkets permanente geodetiske basestasjoner. FORFATTER: EMILIE HEEN FLADBY Antall ord: 8449 Dato: 18.05.2016 Sammendrag Oppgavens
BACHELOROPPGAVE: TITTEL Etablering av fastmerker med statiske målinger til Kartverkets permanente geodetiske basestasjoner. FORFATTER: EMILIE HEEN FLADBY Antall ord: 8449 Dato: 18.05.2016 Sammendrag Oppgavens
Masteroppgave 2016 IMT. Kvalitetskontroll av CPOS. Quality control of CPOS. Bendik Myrvang Geomatikk
 Masteroppgave 2016 IMT 30 stp Kvalitetskontroll av CPOS Quality control of CPOS Bendik Myrvang Geomatikk ii Forord Denne masteroppgaven markerer avslutningen på mitt geomatikkstudie ved NMBU og fem flotte
Masteroppgave 2016 IMT 30 stp Kvalitetskontroll av CPOS Quality control of CPOS Bendik Myrvang Geomatikk ii Forord Denne masteroppgaven markerer avslutningen på mitt geomatikkstudie ved NMBU og fem flotte
Dataøving 2. TTK5 Kalmanfiltrering og navigasjon Løsningsforslag
 Dataøving TTK5 Kalmanfiltrering og navigasjon Løsningsforslag Oppgave 1 a) Sammenhengen mellom pseudorange ρ og posisjon x i ECEF rammen når man har n satellitter er: q ρ i = (x si x) T (x si x)+cτ (1)
Dataøving TTK5 Kalmanfiltrering og navigasjon Løsningsforslag Oppgave 1 a) Sammenhengen mellom pseudorange ρ og posisjon x i ECEF rammen når man har n satellitter er: q ρ i = (x si x) T (x si x)+cτ (1)
Kommunikasjon (samt litt av hvert fra seminar 1)
") Kommunikasjon (samt litt av hvert fra seminar 1) Norsk olje&gass Arbeidsseminar 2 - HMS-utfordringer i nordområdene Rune Sandbakken Seksjonssjef - Satellittkommunikasjon Rune.sandbakken@spacecentre.no
Kommunikasjon (samt litt av hvert fra seminar 1) Norsk olje&gass Arbeidsseminar 2 - HMS-utfordringer i nordområdene Rune Sandbakken Seksjonssjef - Satellittkommunikasjon Rune.sandbakken@spacecentre.no
Etablering av kalibreringsnett, og GNSS baselinjeanalyse
 Etablering av kalibreringsnett, og GNSS baselinjeanalyse Marius Øie Master i ingeniørvitenskap og IKT Innlevert: juni 2015 Hovedveileder: Trond Arve Haakonsen, BAT Medveileder: Hossein Nahavandchi, BAT
Etablering av kalibreringsnett, og GNSS baselinjeanalyse Marius Øie Master i ingeniørvitenskap og IKT Innlevert: juni 2015 Hovedveileder: Trond Arve Haakonsen, BAT Medveileder: Hossein Nahavandchi, BAT
Fig 1A Ideell jord. Høyde λ/2 Fig 1D Tørr jord. Høyde λ/2. Fig 1B Ideell jord. Høyde λ/4 Fig 1E Tørr jord. Høyde λ/4
 HF-antenner Av Snorre Prytz, Forsvarets forskningsinstitutt Generelt om NVIS-antenner En NVIS (Near Vertical Incident Skyvave) antenne skal dirigere mest mulig av RF effekten rett opp. Effekten blir reflektert
HF-antenner Av Snorre Prytz, Forsvarets forskningsinstitutt Generelt om NVIS-antenner En NVIS (Near Vertical Incident Skyvave) antenne skal dirigere mest mulig av RF effekten rett opp. Effekten blir reflektert
Hva skal vi med fastmerker?
 Hva skal vi med fastmerker? Innhold: Har Norge et entydig geodetisk grunnlag? Hvorfor har Vegvesenet fokus på nabonøyaktighet? Målefeil, standardavvik og toleranser NS3580 Bygg og anleggsnett Sanntids-GNSS
Hva skal vi med fastmerker? Innhold: Har Norge et entydig geodetisk grunnlag? Hvorfor har Vegvesenet fokus på nabonøyaktighet? Målefeil, standardavvik og toleranser NS3580 Bygg og anleggsnett Sanntids-GNSS
AT-329 COLD REGIONS FIELD INVESTIGATIONS. GNSS-systemer
 AT-329 COLD REGIONS FIELD INVESTIGATIONS FEBRUAR 2012 AT-329 COLD REGIONS FIELD INVESTIGATIONS GNSS-systemer Kristoffer Sandstad Hansen Arvid Engelmark Hofgaard Herman Bjørn Smith 1 AT-329 COLD REGIONS
AT-329 COLD REGIONS FIELD INVESTIGATIONS FEBRUAR 2012 AT-329 COLD REGIONS FIELD INVESTIGATIONS GNSS-systemer Kristoffer Sandstad Hansen Arvid Engelmark Hofgaard Herman Bjørn Smith 1 AT-329 COLD REGIONS
Kapittel 12. Spredt spektrum
 Kapittel 12 Spredt spektrum 12.1 s. 719 Hva er spredt spektrum? Spredt spektrum er å bruke mye større båndbredde enn nødvendig Båndbredde W SS = G p W min Nødvendig båndbredde W min R Spredefaktor (processing
Kapittel 12 Spredt spektrum 12.1 s. 719 Hva er spredt spektrum? Spredt spektrum er å bruke mye større båndbredde enn nødvendig Båndbredde W SS = G p W min Nødvendig båndbredde W min R Spredefaktor (processing
Bruk av ICON for å estimere ionosfærisk forsinkelse over nord Europa. Estimates of ionospheric delay above northern Europe using ICON
 Masteroppgave 2016 30 stp Institutt for matematiske realfag og teknologi Bruk av ICON for å estimere ionosfærisk forsinkelse over nord Europa Estimates of ionospheric delay above northern Europe using
Masteroppgave 2016 30 stp Institutt for matematiske realfag og teknologi Bruk av ICON for å estimere ionosfærisk forsinkelse over nord Europa Estimates of ionospheric delay above northern Europe using
NN Nytt høydegrunnlag i Ringebu kommune.
 NN 2000 - Nytt høydegrunnlag i Ringebu kommune. Jobber du med kart eller andre høydebærende data? Da bør du vite at vi går over til nytt høydegrunnlag fra 1. juli 2011. Da blir alle høyder endret med opp
NN 2000 - Nytt høydegrunnlag i Ringebu kommune. Jobber du med kart eller andre høydebærende data? Da bør du vite at vi går over til nytt høydegrunnlag fra 1. juli 2011. Da blir alle høyder endret med opp
Forelesning i SIB6005 Geomatikk, 30.9.2002. HoltEX
 1 Forelesning i SIB6005 Geomatikk, 30.9.2002 Geodesi/landmåling. 30.9 DAGENS TEMA: Gi bakgrunn for feltøvingen GPS: Planlegging HoltEX Tp343 Passpunkt Klassisk måling: Vinkel- og avstandsmåling Nytt pkt
1 Forelesning i SIB6005 Geomatikk, 30.9.2002 Geodesi/landmåling. 30.9 DAGENS TEMA: Gi bakgrunn for feltøvingen GPS: Planlegging HoltEX Tp343 Passpunkt Klassisk måling: Vinkel- og avstandsmåling Nytt pkt
GNSS/INS-basert dypgåendekalibrering og vannstandsmåling.
 GNSS/INS-basert dypgåendekalibrering og vannstandsmåling. S. Roemer, L.K. Nesheim, Sjøkartverket Geodesi & Hydrografidagene, 2015 Innhold Innledning Testområde, formål Prinsipp Skisse Basisformel Data
GNSS/INS-basert dypgåendekalibrering og vannstandsmåling. S. Roemer, L.K. Nesheim, Sjøkartverket Geodesi & Hydrografidagene, 2015 Innhold Innledning Testområde, formål Prinsipp Skisse Basisformel Data
Geografisk navigasjon. Lengde- og breddegrader
 Geografisk navigasjon Kartreferanse er en tallangivelse av en geografisk posisjon. Tallene kan legges inn i en datamaskin med digitalt kart, en GPS eller avmerkes på et papirkart. En slik tallmessig beskrivelse
Geografisk navigasjon Kartreferanse er en tallangivelse av en geografisk posisjon. Tallene kan legges inn i en datamaskin med digitalt kart, en GPS eller avmerkes på et papirkart. En slik tallmessig beskrivelse
Fastmerker i løse masser
 Fastmerker i løse masser En studie av stabilitet for utvalgte fastmerker langs E-18 i Østfold Ola Torstein Endresen Masteroppgave i geofag Studieretning: Naturgeografi, hydrologi og geomatikk Institutt
Fastmerker i løse masser En studie av stabilitet for utvalgte fastmerker langs E-18 i Østfold Ola Torstein Endresen Masteroppgave i geofag Studieretning: Naturgeografi, hydrologi og geomatikk Institutt
Undergrunnskartlegging Georadar (GPR) i anvendelse. Tobias Jokisch
 i anvendelse. Tobias Jokisch") Undergrunnskartlegging Georadar (GPR) i anvendelse Tobias Jokisch INTRODUKSJON TEORI OG ANVENDELSE DATAEKSEMPLER OPPSUMMERING / DISKUSJON INTRODUKSJON TEORI OG ANVENDELSE DATAEKSEMPLER OPPSUMMERING / DISKUSJON
Undergrunnskartlegging Georadar (GPR) i anvendelse Tobias Jokisch INTRODUKSJON TEORI OG ANVENDELSE DATAEKSEMPLER OPPSUMMERING / DISKUSJON INTRODUKSJON TEORI OG ANVENDELSE DATAEKSEMPLER OPPSUMMERING / DISKUSJON
Høydegrunnlaget endres for første gang på over 50 år
 Høydegrunnlaget endres for første gang på over 50 år Fra 1. desember 2013 blir alle høyder hevet med 11-15 cm. Jobber du med kart eller andre høydebærende data? Da bør du vite at vi går over til nytt høydegrunnlag
Høydegrunnlaget endres for første gang på over 50 år Fra 1. desember 2013 blir alle høyder hevet med 11-15 cm. Jobber du med kart eller andre høydebærende data? Da bør du vite at vi går over til nytt høydegrunnlag
Novatek AS har brukt eget utstyr til inspeksjonen. Utstyret som er brukt er følgende:
 1 ORIENTERING Novatek AS har på oppdrag for Multiconsult AS, Tromsø, utført topografisk kartlegging av trase for undervannsledning samt visuell undervannsinspeksjon med ROV, i sjøen ved Vika i Harstad
1 ORIENTERING Novatek AS har på oppdrag for Multiconsult AS, Tromsø, utført topografisk kartlegging av trase for undervannsledning samt visuell undervannsinspeksjon med ROV, i sjøen ved Vika i Harstad
Bruk av NGO koordinater på håndholdte GPS mottakere Geir-Harald Strand og Ola Øvstedal
 1-2003_928.book Page 19 Tuesday, March 11, 2003 10:00 AM Bruk av NGO koordinater på håndholdte GPS mottakere Geir-Harald Strand and Ola Øvstedal: Using NGO co-ordinates with handheld GPS devices KART OG
1-2003_928.book Page 19 Tuesday, March 11, 2003 10:00 AM Bruk av NGO koordinater på håndholdte GPS mottakere Geir-Harald Strand and Ola Øvstedal: Using NGO co-ordinates with handheld GPS devices KART OG
Evaluering og forbedring av GPS posisjonsmåling for mobile enheter
 Evaluering og forbedring av GPS posisjonsmåling for mobile enheter av Hermod Finjord Geir Øynes Hovedoppgave til mastergraden i Informasjons- og Kommunikasjonsteknologi Høgskolen i Agder Fakultet for teknologi
Evaluering og forbedring av GPS posisjonsmåling for mobile enheter av Hermod Finjord Geir Øynes Hovedoppgave til mastergraden i Informasjons- og Kommunikasjonsteknologi Høgskolen i Agder Fakultet for teknologi
GPS Kurs for Turledere
 GPS Kurs for Turledere Wolfgang Leister Norsk Regnesentral Tåke ved St. Pål Tåke ved St. Pål, 20m sikt på noen hundre meter Snøfonner uten tråkk eller merker Følge på 12+1 inn i tåka kom ut med 4 personer
GPS Kurs for Turledere Wolfgang Leister Norsk Regnesentral Tåke ved St. Pål Tåke ved St. Pål, 20m sikt på noen hundre meter Snøfonner uten tråkk eller merker Følge på 12+1 inn i tåka kom ut med 4 personer
Radiosystemer (RS) Romteknologi og navigasjon. Radioteknikk og kommunikasjon
 Romteknologi og navigasjon. Radioteknikk og kommunikasjon") Radiosystemer (RS) Hovedprofil: Romteknologi og navigasjon Radioteknikk og kommunikasjon Hovedprofil: 7 & 8 sem Radiokommunikasjon Fjernmåling Romteknologi I &II Navigasjonssystemer Radio-SYSTEMER Radio-TEKNIKK
Radiosystemer (RS) Hovedprofil: Romteknologi og navigasjon Radioteknikk og kommunikasjon Hovedprofil: 7 & 8 sem Radiokommunikasjon Fjernmåling Romteknologi I &II Navigasjonssystemer Radio-SYSTEMER Radio-TEKNIKK
EKSAMEN I EMNE SIB 6005 GEOMATIKK-1. Torsdag 25. november 1999 Tid: 0900-1500
 NORGES TEKNISK-NTURVITENSKPELIGE UNIVERSITET (GM1-99h) side 1 av 5 INSTITUTT FOR KRT OG OPPMÅLING EKSMEN I EMNE SIB 65 GEOMTIKK-1 Torsdag 25. november 1999 Tid: 9-15 Faglig kontakt under eksamen: Oddgeir
NORGES TEKNISK-NTURVITENSKPELIGE UNIVERSITET (GM1-99h) side 1 av 5 INSTITUTT FOR KRT OG OPPMÅLING EKSMEN I EMNE SIB 65 GEOMTIKK-1 Torsdag 25. november 1999 Tid: 9-15 Faglig kontakt under eksamen: Oddgeir
Hvordan få riktige grunnlagsdata til prosjektering?
 Hvordan få riktige grunnlagsdata til prosjektering? Datum og projeksjoner (UTM/NTM, NN2000) Transformasjoner Metadata/koding av data Asbjørn Eilefsen Statens vegvesen Geodata Region sør Datum og projeksjoner
Hvordan få riktige grunnlagsdata til prosjektering? Datum og projeksjoner (UTM/NTM, NN2000) Transformasjoner Metadata/koding av data Asbjørn Eilefsen Statens vegvesen Geodata Region sør Datum og projeksjoner
Hva skal vi med fastmerker?
 Hva skal vi med fastmerker? Innhold: Entydig geodetisk grunnlag Hvorfor har Vegvesenet fokus på nabonøyaktighet? Målefeil, standardavvik og toleranse Maskinstyring/maskinkontroll Fastmerker basert på midlede
Hva skal vi med fastmerker? Innhold: Entydig geodetisk grunnlag Hvorfor har Vegvesenet fokus på nabonøyaktighet? Målefeil, standardavvik og toleranse Maskinstyring/maskinkontroll Fastmerker basert på midlede
Presisjonsseismologi: Nøyaktig lokalisering av Nord-Koreas prøvesprengninger
 NGFs 100-års Jubileumssymposium, Geilo, 20. 22. september 2017 Presisjonsseismologi: Nøyaktig lokalisering av Nord-Koreas prøvesprengninger Tormod Kværna Steven Gibbons NGFs 100-års Jubileumssymposium,
NGFs 100-års Jubileumssymposium, Geilo, 20. 22. september 2017 Presisjonsseismologi: Nøyaktig lokalisering av Nord-Koreas prøvesprengninger Tormod Kværna Steven Gibbons NGFs 100-års Jubileumssymposium,
Kort innføring i kart, kartreferanser og kompass
 Kort innføring i kart, kartreferanser og kompass UTM Universal Transverse Mercator (UTM) er en måte å projisere jordas horisontale flate over i to dimensjoner. UTM deler jorda inn i 60 belter fra pol til
Kort innføring i kart, kartreferanser og kompass UTM Universal Transverse Mercator (UTM) er en måte å projisere jordas horisontale flate over i to dimensjoner. UTM deler jorda inn i 60 belter fra pol til
Blir det nok frekvenser til mobilt bredbånd?
 Blir det nok frekvenser til mobilt bredbånd? Nye frekvensbånd Samlivsproblemer i den digitale dividenden Geir Jan Sundal Avdelingsdirektør Post- og teletilsynet Mulige nye frekvensbånd (1) 800 MHz (790
Blir det nok frekvenser til mobilt bredbånd? Nye frekvensbånd Samlivsproblemer i den digitale dividenden Geir Jan Sundal Avdelingsdirektør Post- og teletilsynet Mulige nye frekvensbånd (1) 800 MHz (790
Versjon 2012-01-30. Elling Ringdal
 Veileder fra Skog og landskap ----------------------------------------------------------------------------------------------------------------- BRUK AV GPS VED AJOURFØRING AV AR5 I GIS/LINE Versjon 2012-01-30
Veileder fra Skog og landskap ----------------------------------------------------------------------------------------------------------------- BRUK AV GPS VED AJOURFØRING AV AR5 I GIS/LINE Versjon 2012-01-30
Grunnlagsmåling for store prosjekter. Erik Hagbø TerraTec
 Grunnlagsmåling for store prosjekter Erik Hagbø TerraTec Agende Litt om TerraTec Litt generelt rundt grunnlagsmålinger Aktuelle problemstillinger Standarder E18 Tvedestrand Arendal E6 Manglerud Follobanen
Grunnlagsmåling for store prosjekter Erik Hagbø TerraTec Agende Litt om TerraTec Litt generelt rundt grunnlagsmålinger Aktuelle problemstillinger Standarder E18 Tvedestrand Arendal E6 Manglerud Follobanen
Rutine. for behandling av kart- og innmåling/ stikningsdata R-002. jbr oas oas rapport A Foreløpig utgave oas oas
 B 06.02.2012 Lagt til Grunnlagspunkter, enkel jbr oas oas rapport A 27.01.2012 Foreløpig utgave oas oas Rev Dato Beskrivelse Utført Kontrollert Fagansvarlig 8864 Prosjekt nr Rutine for behandling av kart-
B 06.02.2012 Lagt til Grunnlagspunkter, enkel jbr oas oas rapport A 27.01.2012 Foreløpig utgave oas oas Rev Dato Beskrivelse Utført Kontrollert Fagansvarlig 8864 Prosjekt nr Rutine for behandling av kart-
Integrering av Forskning og Utviking (FoU) i undervisning
 i undervisning") Integrering av Forskning og Utviking (FoU) i undervisning 2005 FoU_pres_082005_v3.ppt 1 Posisjonering Mye i geomatikk handler om å finne ut hvor ting er, eller hvor ting skal plasseres Dette kan gjøres
Integrering av Forskning og Utviking (FoU) i undervisning 2005 FoU_pres_082005_v3.ppt 1 Posisjonering Mye i geomatikk handler om å finne ut hvor ting er, eller hvor ting skal plasseres Dette kan gjøres
Erfaringer og resultater etter to tiår med absolutte tyngdemålinger i Norge
 Erfaringer og resultater etter to tiår med absolutte tyngdemålinger i Norge Kristian Breili Geodesidivisjonen/Kartverket og IMT/NMBU Geodesi- og hydrografidagene 18. og 19. november 215, Sundvolden Hotell
Erfaringer og resultater etter to tiår med absolutte tyngdemålinger i Norge Kristian Breili Geodesidivisjonen/Kartverket og IMT/NMBU Geodesi- og hydrografidagene 18. og 19. november 215, Sundvolden Hotell
Laserdata for dummies. Ivar Oveland 19 oktober 2015
 Laserdata for dummies Ivar Oveland 19 oktober 2015 Laserdata for dummies Norges miljø- og biovitenskapelige universitet 1 INTRODUKSJON LiDAR LiDAR: Light Detection And Ranging Hva er laserdata? INTRODUKSJON
Laserdata for dummies Ivar Oveland 19 oktober 2015 Laserdata for dummies Norges miljø- og biovitenskapelige universitet 1 INTRODUKSJON LiDAR LiDAR: Light Detection And Ranging Hva er laserdata? INTRODUKSJON
Hvor i all verden? Helge Jellestad
 Helge Jellestad Hvor i all verden? Vi presenterer her deler av et et undervisningsopplegg for ungdomstrinnet og videregående skole. Hele opplegget kan du lese mer om på www.caspar.no/tangenten/2009/hvor-i-all-verden.pdf.
Helge Jellestad Hvor i all verden? Vi presenterer her deler av et et undervisningsopplegg for ungdomstrinnet og videregående skole. Hele opplegget kan du lese mer om på www.caspar.no/tangenten/2009/hvor-i-all-verden.pdf.
Framtidige utfordringer for landmåleren Bransjens behov/ forventninger. Nye krav, ny kunnskap. Når har du kontroll?
 Framtidige utfordringer for landmåleren Bransjens behov/ forventninger. Nye krav, ny kunnskap. Når har du kontroll? v/ Bjørn Godager, Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/geomatikk/
Framtidige utfordringer for landmåleren Bransjens behov/ forventninger. Nye krav, ny kunnskap. Når har du kontroll? v/ Bjørn Godager, Høgskolen i Gjøvik Email: bjoern.godager@hig.no Hjemmeside: http://www.hig.no/geomatikk/
Navigasjon. Koordinater og navigasjon Norsk Folkehjelp Lørenskog Tirsdag 29. januar 2015. Tom Hetty Olsen
 Navigasjon Koordinater og navigasjon Norsk Folkehjelp Lørenskog Tirsdag 29. januar 2015 Tom Hetty Olsen Kartreferanse Kartreferanse er en tallangivelse av en geografisk posisjon. Tallene kan legges inn
Navigasjon Koordinater og navigasjon Norsk Folkehjelp Lørenskog Tirsdag 29. januar 2015 Tom Hetty Olsen Kartreferanse Kartreferanse er en tallangivelse av en geografisk posisjon. Tallene kan legges inn
Høydegrunnlaget endres for første gang på over 50 år
 Høydegrunnlaget endres for første gang på over 50 år Fra 1. desember 2014 blir alle høyder hevet med ca 0-7 cm. Jobber du med kart eller andre høydebærende data? Da bør du vite at vi går over til nytt
Høydegrunnlaget endres for første gang på over 50 år Fra 1. desember 2014 blir alle høyder hevet med ca 0-7 cm. Jobber du med kart eller andre høydebærende data? Da bør du vite at vi går over til nytt
TEKNISK KRAVSPESIFIKASJON FOR SJØMÅLING I REGI AV STATENS KARTVERK SJØ
 Statens kartverk Sjø Kravspesifikasjon for Sjømåling Versjon: 2.00 Gjelder fra: 31.08.2011 Utarbeidet av: Herman Iversen og Arne Ofstad Godkjent av: Iversen, Herman Produktspesifikasjon Sidenr: 1 av 9
Statens kartverk Sjø Kravspesifikasjon for Sjømåling Versjon: 2.00 Gjelder fra: 31.08.2011 Utarbeidet av: Herman Iversen og Arne Ofstad Godkjent av: Iversen, Herman Produktspesifikasjon Sidenr: 1 av 9