2 KODESKIVE. 2.1 Oppbygning
|
|
|
- Greta Erlandsen
- 8 år siden
- Visninger:
Transkript
1 side 2 1 INNLEDNING Det skal i denne oppgaven presenteres noen aktuelle vinkel-transducere. Transducer kan defineres som energioverfører eller signalomformer. Vi skal se på de mest vanlige typene for omforming av mekanisk dreievinkel til forskjellige typer elektrisk utgangssignal. Grunnlaget for å kunne avgjøre hvor god en transducer er, klassifikasjonsdataene, blir også berørt.

2 side 3 2 KODESKIVE Kodeskiven er en vinkeltransducer med binær utgang. Den benyttes særlig i tilfeller hvor stor absolutt nøyaktighet og/eller oppløsning er ønskelig. Kodeskiven er en plan sirkulær plate med etset eller påtrykket mønster. I første generasjon kodeskiver skjedde avlesningen v.h.a. børster, og mønsteret var et ledende belegg. Dette prinsippet medførte begrenset levetid og oppløsning. Nåtidens kodeskiver er transparente og avlesningen skjer optisk med lysfølsomme elementer, fotoceller, foto-transistorer eller dioder. Oppløsningen og absolutt nøyaktighet av størrelsesorden en milliontedel er mulig. 2.1 Oppbygning En fotoelektrisk encoder (sifrerer) for vinkelavlesning krever relativt få komponenter: - En kodet sirkulær plate som har nødvendig informasjon i form av mørkt og lyst påtrykket mønster - En rotasjonsakse opphengt i kulelagre - En lyskilde - Et optisk system, linser og spalter - En rekke lysfølsomme elementer Alle disse komponentene varierer i størrelse og kompleksitet for å få ønskede egenskaper for det ferdige produkt. Mønsteret på kodeskiven kan varieres til flere utgangsfunksjoner, slik som syklisk og ikke-syklisk binærkode, BCD, sinus/cosinus, logaritmisk osv. I figur 2.1 vises to metoder for belysning av en kodeskive. Lyskilden er normalt en glødelampe. Lysemitterende halvlederkomponenter kan også benyttes. De har sin særlige fordel i mekanisk styrke og høy virkningsgrad sammenlignet med glødelampen. Sylindrisk linse og flaps Spalte Figur 2.1 Metoder for belysning av kodeskiven

3 side 4 De fleste lysdetektorer krever etterfølgende forsterkere for å kunne overføre informasjon over lengre linjer. Normalt plasseres elektronikken inne i samme hus som kodeskiven. 2.2 Signalkoding Vi skiller mellom to typer koding, absolutt eller inkrementell. Ved absolutt koding defineres vinkelen diskret av et binært tall, og kodeskiven har et spor for hvert bit i det binære tallet. En får da forskjellige tall for hver posisjon innenfor kodens oppløsning. Ved inkrementell koding benyttes en kodeskive som har ett eller to spor med likt fordelt lyse og mørke partier. Utgangen fra denne type kodeskive gir posisjonsinformasjon i form av akkumulerte tellepulser relativt til en referanse eller nullposisjon. Noen har også et ekstra spor som gir en puls pr. omdreining som utgang og som benyttes som markering eller startpunkt. Retningsinformasjon fås ved å benytte to spor forskjøvet 90 elektroniske grader. Ulempen med denne typen kodeskive er muligheten for falske data fra interferens eller transientforhold. Ved oppstart må en alltid gå til referanseposisjon for å finne ut hvor en er. Fordelen er få arbeidskanaler, normalt to, og enkel elektronikk. For tilfeller med relative data gir inkrementelle kodeskiver meget nøyaktige målinger. Ved bruk av flere avlesingspunkter kan feil fra lagerslitasje, sentrering av kodeskiven eller radiell forskyvning av de lysfølsomme elementer praktisk talt elimineres. Turtallsmåling blir også meget enkel. 2.3 Koder I et optisk system vil bredden på lysstrålen være en begrensende faktor for oppløsningen. Lysstrålen bør altså være svært smal, men dermed følger også veldig lite lys. Bredden som velges må altså være et kompromiss bestemt av nødvendig oppløsning som mønsteret krever og egenskapene til de lysfølsomme elementene. Virkelige problemer oppstår når en har et kodemønster med flere sammenfallende grenser, eksempelvis ved vanlig binærkode, hvor et bit feil avlest kan gi svært store feil. (Feilavlesning av MSB alene vil medføre en feil svarende til halve måleområdet.) I figur 2.2 er det vist kodemønster for binærkoden og syklisk binærkode, også kalt gray-kode. Vi ser at med graykoden vil det kun være mulighet for feil avlesning av et bit om gangen. Dette vil gi feil kun i det minst signifikante bit. For BCD avlesning benyttes en annen kode kalt excess 3 -koden.

4 side 5 Vanlig binærkode Syklisk binærkode (Graykode) Figur 2.2 Sann og syklisk binærkode

5 side 6 3 SYNKROELEMENTER Til måling av rotasjon (vinkeldreining) brukes ofte synkroelementer. Disse kan brukes for direkte vinkelmåling, måling av summer eller differanser av vinkler eller for overføring av mekanisk dreievinkel, f.eks. ved fjernavlesninger. Et synkroelement er i prinsippet en transformator hvor den magnetiske kobling mellom viklingene kan varieres v.h.a. en dreibar rotor. Konstruksjonen har mye til felles med en trefasemotor. Figur 3.1 viser viklingsdiagrammet skjematisk. Mates rotorviklingen med en konstant AC spenning, vil det induseres spenninger i de tre statorviklingene med amplitudeverdier som varierer med rotorens stilling ϕ. Dette er antydet i figur 3.2. Vi ser at spenningene er forskjøvet 120 i forhold til hverandre. Figur 3.1 Synkrogiver Figur 3.2 Induserte spenninger i statorviklingene som funksjon av rotorens dreievinkel, ϕ Tidligere ble det ofte benyttet flere synkroelementer sammenkoblet i reguleringssløyfer eller til fjernavlesning av vinkelposisjoner. Med økende bruk av datamaskiner for datainnsamling og reguleringsformål har de overtatt funksjonen for flere av synkroelementene, og synkro-generatoren blir mer benyttet kun som vinkeltransducer.

6 side 7 For at en synkrogiver skal kommunisere med datamaskinen må en benytte en synkro/digital omformer. Vi skal i denne oppgaven måle litt på en resolver med S/D omformer og prøve å finne noen karakteristiske egenskaper for begge. 3.1 Resolver Resolver er et synkroelement hvor viklingene er plassert for å gi magnetiske felter forskjøvet 90 i forhold til hverandre. Med en referansespenning U ref = U 0 sinω t (3.1) på rotorviklingen vil de to statorviklingene få spenningene U 1 sinϕsinωt U 2 cosϕsinωt (3.2) hvor ϕ er dreievinkelen. Ideelt skal U 1 = U 2. Skjematisk diagram er vist i figur 3.3. Resolversignaler kan omformes til synkrosignaler og omvendt ved hjelp av en Scotttransformator. Figur 3.3 Skjematisk diagram for en resolver 3.2 Scott-transformatoren Moderne S/D-omformere arbeider nesten alle med signaler i resolverformat. Omforming fra synkro til resolversignal gjøres normalt ved bruk av to sammenkoblede transformatorer betegnet som Scott-transformator. Koblingen er vist i figur 3.4. Den tappede transformatoren betegnes hoved-transformator og den utappede som teaser -transformator. Med omsettingsforholdene vist i figur 3.4 vil utgangssignalene være: U 1 = Usinϕsinωt U 2 = Ucosϕsinωt (3.3)
 på rotorviklingen vil de to statorviklingene få spenningene U 1 sinϕsinωt U 2 cosϕsinωt (3.2) hvor ϕ er dreievinkelen. Ideelt skal U 1 = U 2. Skjematisk diagram er vist i figur 3.3. Resolversignaler kan omformes til synkrosignaler og omvendt ved hjelp av en Scotttransformator.")
7 side 8 Omforming fra resolver til synkrosignal skjer ved invertering av koblingen i figur 3.4. Figur 3.4 Scott-transformator 3.3 Synkro/digital-omformer Det er mange metoder som kan benyttes for omforming av synkro/resolver signaler til digital representasjon av dreievinkelen ϕ. To metoder har holdt seg lengst og vi skal kommentere dem i det følgende. Det er: - Følgende synkro/digital omformer - Samplet skrittvis tilnærmings S/D-omformer Den følgende omformer gir størst nøyaktighet selv med forvrengning av inngangssignalene. Den er begrenset i hastighet. En spesiell fordel med denne omformertypen er at den ikke gir tilleggsfeil ved konstant turtall på rotasjonsaksen. Denne typen omformer benyttes mest fast tilknyttet en synkro eller en resolver. I den samplede skrittvis tilnærmingsomformeren benyttes et skrittvis tilnærmingsregister i stedet for en teller som ved den følgende S/D-omformer. Inngangssignalet i resolverformat blir samplet og holdt konstant mens tilnærmingsregistret arbeider seg mot avlest verdi et bit om gangen. Tidspunktet for samplingen er når referansespenningen etter eventuell fase kompensasjon har sin maksimale verdi. Omformingstiden er kort, størrelses orden µs, noe som gjør denne type omformer svært egnet til multipleksede systemer. Figur 3.5 og 3.6 viser blokkdiagram for disse typene S/D omformere.

8 side 9 Figur 3.5 Blokkdiagram for en følgende S/D-omformer Figur 3.6 Blokkdiagram for en skrittvis tilnærmings S/D-omformer Synkroer og resolvere benyttes mye som vinkeltransducere. De er av middels nøyaktighet, ±4 bueminutter for de bedre typene. Sammenlignet med kodeskiven har de mindre fysiske dimensjoner. De er robuste, har lang levetid, men trenger noe større dreiemoment enn kodeskiven. For gode måleresultater kreves en referansespenning med lite distorsjon. Standardiserte frekvenser for referanser er 50, 60, 400 og 2600 Hz. Arbeidsområde for synkro/resolver og kodeskiven er 360, en hel omdreining.

9 side 10 4 POTENSIOMETRE Den enkleste og mest brukte vinkeltransducer er potensiometeret. Vi skal i denne oppgaven bruke to forskjellige pot.metre, et trådviklet og et med motstandsmateriale av ledende plast (conductive plastic). Trådviklede elementer er normalt benyttet for større nøyaktigheter. Ulempene er begrenset oppløsning, bevegelsesstøy og begrenset rotasjonslevetid. Ledende-plast pot.metre er relativt nye på markedet. De har sin store fordel i lang levetid og god oppløsning. Arbeidsområdet for pot.metrene varierer fra 330 til 350.

10 side 11 5 ARBEIDSFORSKRIFT Utstyret som benyttes under målingene er vist i figur 5.1. En servomotor driver en aksling med en fast innkoplet kodeskive, og elementene som skal testes koples inn etter hvert. Under målingene skal akslingen kjøres med konstant rotasjonshastighet, og kodeskiven skal hele tiden benyttes som referanse. Figur 5.1 Måleoppstilling All elektronikk som er nødvendig for å teste elementene er plassert i en egen boks. Denne elektronikkenheten og reguleringssystemet for servomotoren er beskrevet i appendix A, og en veiledning skal dessuten være utlagt på arbeidsplassen. Elektronikken er forsøkt gjort studentsikker. Vis allikevel litt forsiktighet, og vær spesielt oppmerksom på at DIN-pluggene fra transducerne må koples til riktige moduler på den nevnte boksen. Til kurvetegning skal det benyttes en ordinær x-y-skriver, der x-aksen hele tiden skal styres av kodeskiven. Pennen til skriveren blir fort tørr hvis ikke hetten til pennen settes på etter bruk. Pass på å sette på hetten til pennen igjen når dere er ferdige med å bruke skriveren! Da slipper neste gruppe å lete etter en brukbar penn. NB! Påse at vinkelmålerne ikke koples inn 180 feil. Den flate delen av platen skal peke nedover som vist i figur 5.2. Figur 5.2 Plassering av vinkelmålere I appendix B er måleområde og uavhengig linearitet kort beskrevet. Les gjennom både appendix A og B før målingene startes slik at unødvendige problemer unngås! Alle kurveark skal selvfølgelig merkes tydelig med hva de representerer og verdier på aksene.

11 side Kodeskiven - Sett venderen på elektronikkenheten i stilling Gray, kjør servosystemet sakte med manuell turtallsreferanse, og konstater at kun ett bit skifter om gangen. - Finn en generell logisk funksjon for overgang fra vanlig binærkode til Gray-kode: g n = fb ( 11, b 10,, b 0 ) gyldig for alle n (5.1) der g n er gray-siffer n (n=0,...,11) og b b 0 representerer de binære sifrene Vi har en ordbredde på 12 bits. Hvor stor oppløsning gir dette [ ]? - Hva blir maksimal tillatt omformingstid for Gray/bin-omformeren hvis den skal kunne følge et turtall på 4000 o/min med full nøyaktighet? 5.2 Synkrogiver Vi skal nå benytte en resolver, pris ca. 700 kr, og en følgende synkro/ digitalomformer. - Ta opp kurve for statisk avvik som funksjon av rotasjonsvinkelen, benytt automatisk turt.styring (1/2 hast.). X-inngang på x-y-skriver kobles til D/A omformeren som igjen er forbundet med Gray/bin-omformeren. For å få avvikssignal benyttes den digitale subtraktor. Den har en analog utgang på 0.1 V/sektor. - Kommentarer? 5.3 Potensiometre Tips! For denne oppgaven gis følgende tips: Les hele oppgaven først inklusiv likningene, forstå hva dere måler, forstå hva linearitet er og hvordan denne beregnes (les vedlegg). De følgende punktene skal utføres med begge pot.metrene: - Finn måleområdene ved å ta opp kurver (DC). Dette kan gjøres ved å måle utgangssignalet som funksjon av dreievinkelen. Kjør servoen på halv hastighet (aut. ref.), og benytt x-yskriveren. - Benytt den analoge subtraktoren, og ta opp kurver for uavhengig linearitet (DC). Det gjøres som følger: - Den analoge subtraktoren benyttes for å oppnå avvikssignal, og kurve tas ut på skriveren. (Husk at kodeskiven ikke er internt koplet til den analoge subtraktoren.) Ta kun hensyn til intervallet dere har definert som måleområde, og still inn skala slik at avvikssignalet best mulig utnytter hele arket på skriveren. (Følsomheten på skriveren må selvfølgelig også tilpasses.) - Benytt linjal, og tegn inn linjen som skal benyttes for å beregne uavhengig linearitet. (Se evt. appendix B.) - Hvor stor er den, regnet i % av måleomfanget? En litt mer matematisk analyse av hva vi har gjort:
![.. b 0 representerer de binære sifrene 0-11 - Vi har en ordbredde på 12 bits. Hvor stor oppløsning gir dette [ ]?](/docs-images/45/15040898/images/page_11.jpg "- Hva blir maksimal tillatt omformingstid for Gray/bin-omformeren hvis den skal kunne følge et turtall på 4000 o/min med full nøyaktighet? 5.2 Synkrogiver Vi skal nå benytte en resolver, pris ca.")
12 side 13 Referansen, ut fra D/A-omformeren er gitt ved: Y r = K 1 x + b 1 (5.2) (Her er K 1 kjent, og b 1 = 0.) Målesignalet vil være: Y m = K 2 x + b 2 + Kx () (5.3) hvor K 2 kan varieres på elektronikkenheten, b 2 = 0, og K(x) er linearitetsfeil. Ved å benytte den analoge subtraktoren får vi på utgangen av denne: Y m Y r = K 2 K 1 ( )x+( b 2 b 1 ) + Kx () (5.4) Ved å justere K 2 lik K 1, ville vi ha fått: Y m = Kx () Y r (5.5) dvs. linearitetsfeilen direkte. Det er vanskelig å få K 2 helt lik K 1, men dette har ingen betydning. Avviket kan måles etter inntegning av den rette linje som gir minst avvik, slik vi utførte det i praksis. - Benytt de samme kurvene til å finne endepunktsbasert linearitet. - Sammenlign de to pot.metrene og kommenter!

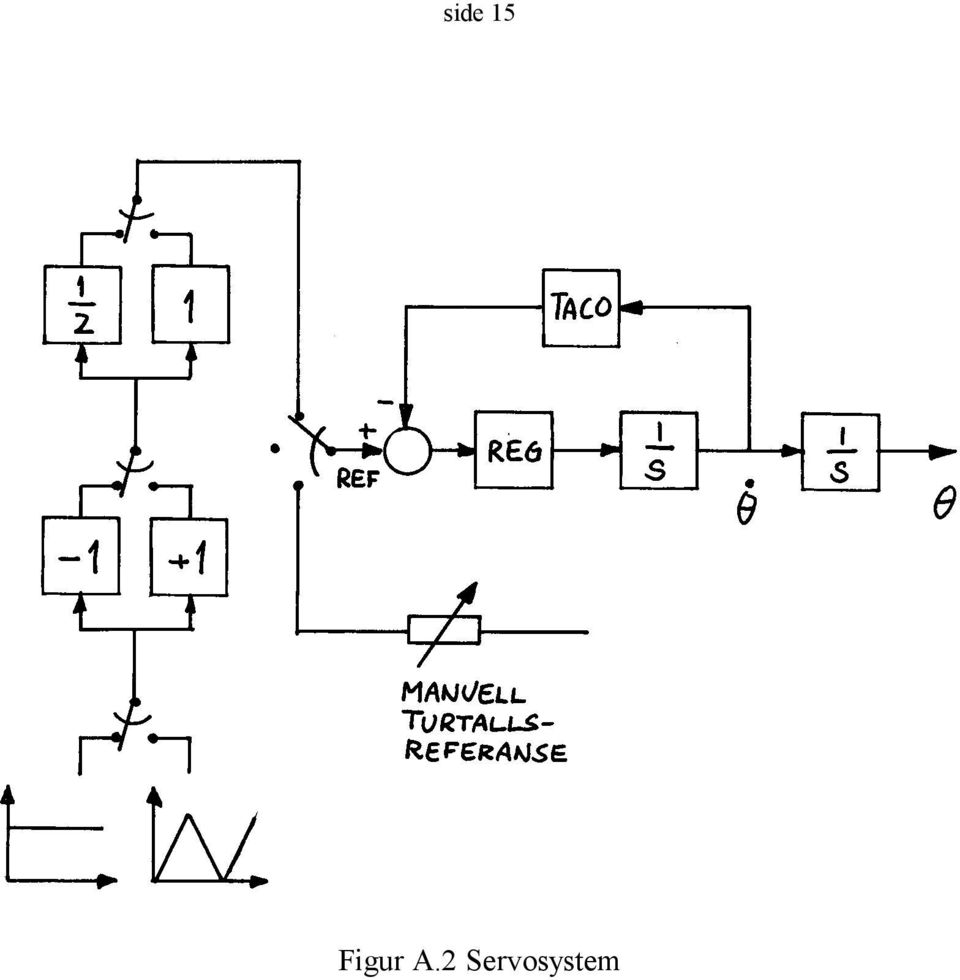
13 side 14 Tillegg A KORT BESKRIVELSE AV ELEKTRONIKKEN- HET OG SERVOSYSTEM A.1 Elektronikkenhet Alle omformere og en del service-enheter er plassert i en egen boks, vist i figur A.1, og omfatter: - Gray/bin-omformer med lysdiodedisplay som kan vise Gray- eller vanlig binærkode bits D/A omformer for signaler i høy eller lav representasjon, representert ved Straight Binary, Offset Binary eller 2 complement. I denne oppgaven skal venderne stå i stillingene L og SB. - Analog subtraktor, utfører A - B på to tilkoplede spenninger. - Digital subtraktor, utfører A - B på to signaler. A er internt koplet til binærutgangen på Gray/ bin-omformeren, og B koples inn på fronten. Utgangen fra subtraktoren er en analog spenning. - Kapasitetsmålermodul. Omformer strøm- til spennings-signal. Nullpunkt og forsterkning kan dessuten endres. - Potensiometermodul, tilfører referansespenning (justerbar) til pot.meteret som testes. Målesignalet (spenning) kan tas direkte ut (DC), eller høypassfiltreres først (AC). - Syncro/digital omformer. - Power-modul som sørger for spenning til alle de andre enheten i boksen. En litt mer detaljert beskrivelse skal være utlagt på lab.plassen. Figur A.1 Elektronikkenhet A.2 Servosystem Figuren for servosystemet burde stort sett være selvforklarende. Dreiehastighet og retning måles v.h.a. en taco, sammenlignes så med hastighetsreferansen, og pådrag settes ut fra en regulator. Hastighetsreferansen kan settes manuelt v.h.a. et pot.meter, eller automatisk av et eget system der en kan velge konstant eller trekantvaierende referanse, negativ eller positiv dreieretning og hel eller halv verdi på referansesignalet.

14 side 15 Figur A.2 Servosystem
15 side 16 Tillegg B MÅLEOMRÅDER OG LINEARITET B.1 Måleområde Når måleområdet for et element skal finnes, benyttes kodeskiven til å definere x-aksen på skriveren vil da representeres som f.eks. 10 eller 20 cm. Signalet fra måleelementet koples inn på skriverens y-akse. Ideelt sett skal dette gi en kurve som vist til venstre i figur B.1, men hvis nullpunktene på kodeskiven og måleelementet ikke faller sammen kan en få en kurve som vist til høyre i figuren. Måleområdet kan allikevel fastsettes som vist. Figur B.1 Måleområde B.2 Linearitet Begrepene endepunktsbasert og uavhengig linearitet er beskrevet i [O.A.Olsen Instrumenteringsteknikk], og er forsøkt illustrert i figur B.2. Den endepunktsbaserte lineariteten finnes ved å la en rettlinjet referansekarakteristikk skjære kalibreringskarakteristikken ved nedre og øvre målegrense. For å finne uavhengig linearitet legges referansekarakteristikken inn slik at maksimalt avvik fra kalibreringskarakteristikken blir minst mulig. Når dette er gjort riktig skal maksimalfeilen opptre på minst tre steder i måleområdet. Denne kurvetilpasningen er kalt maksimalfeilkriteriet. (En annen mulighet ville være å benytte minstekvadraters kriteriet. Det er imidlertid ikke særlig praktisk å bruke manuelt/visuelt, slik som her.) Tallverdiene kan oppgis som det maksimale avviket, regnet i % av måle omfanget, se figur B.2. (Her er måleomfanget [ ] regnet om til målesignalets enheter.) Det er mer vanlig å regne i % av øvre målegrense. For en vinkelmåler, slik som her, er det imidlertid svært rimelig å anta at nedre målegrense er 0. Det betyr at verdiene for måleomfang og øvre målegrense vil være identiske. Når kurvene for linearitet skal tas opp er det en fordel å benytte differansesignalet mellom referansen og måleelementet. En kan da benytte større oppløsning på skriveren.

16 side 17 Under fastsettelse av linearitet skal en selvfølgelig kun ta hensyn til verdier innenfor måleområdet. Figur B.2 Endepunktsbasert linearitet

Analog til digital omformer
 A/D-omformer Julian Tobias Venstad ED-0 Analog til digital omformer (Engelsk: Analog to Digital Converter, ADC) Forside En rask innføring. Innholdsfortegnelse Forside 1 Innholdsfortegnelse 2 1. Introduksjon
A/D-omformer Julian Tobias Venstad ED-0 Analog til digital omformer (Engelsk: Analog to Digital Converter, ADC) Forside En rask innføring. Innholdsfortegnelse Forside 1 Innholdsfortegnelse 2 1. Introduksjon
Permanentmagnetiserte motorer
 Permanentmagnetiserte motorer Tema Oppbygging og virkemåte Dimensjonering Anvendelsesområder Reguleringsmuligheter Sikkerhet Page 2 17.11.2011 Oppbygging og virkemåte Servus = lat. servant => En motor
Permanentmagnetiserte motorer Tema Oppbygging og virkemåte Dimensjonering Anvendelsesområder Reguleringsmuligheter Sikkerhet Page 2 17.11.2011 Oppbygging og virkemåte Servus = lat. servant => En motor
Løsningsforslag til 1. del av Del - EKSAMEN
 Løsningsforslag til 1. del av Del - EKSAMEN Emnekode: ITD13012 Emne: Datateknikk Dato: 27. November 2012 Eksamenstid: kl 9:00 til kl 12:00 Hjelpemidler: 4 sider (A4) (2 ark) med egne notater. Ikke-kummuniserende
Løsningsforslag til 1. del av Del - EKSAMEN Emnekode: ITD13012 Emne: Datateknikk Dato: 27. November 2012 Eksamenstid: kl 9:00 til kl 12:00 Hjelpemidler: 4 sider (A4) (2 ark) med egne notater. Ikke-kummuniserende
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.13 OPPG.NR.: DS3 MOTOR GENERATOROPPGAVE I Et reguleringssystem består av en svitsjstyrt (PWM) motor-generatorenhet og en mikrokontroller (MCU) som
LAB 7: Operasjonsforsterkere
 LAB 7: Operasjonsforsterkere I denne oppgaven er målet at dere skal bli kjent med praktisk bruk av operasjonsforsterkere. Dette gjøres gjennom oppgaver knyttet til operasjonsforsterkeren LM358. Dere skal
LAB 7: Operasjonsforsterkere I denne oppgaven er målet at dere skal bli kjent med praktisk bruk av operasjonsforsterkere. Dette gjøres gjennom oppgaver knyttet til operasjonsforsterkeren LM358. Dere skal
«OPERASJONSFORSTERKERE»
 Kurs: FYS 1210 Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 7 Revidert utgave 18. mars 2013 (Lindem) Omhandler: «OPERASJONSFORSTERKERE» FORSTERKER MED TILBAKEKOBLING AVVIKSPENNING OG HVILESTRØM STRØM-TIL-SPENNING
Kurs: FYS 1210 Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 7 Revidert utgave 18. mars 2013 (Lindem) Omhandler: «OPERASJONSFORSTERKERE» FORSTERKER MED TILBAKEKOBLING AVVIKSPENNING OG HVILESTRØM STRØM-TIL-SPENNING
AUTOMATISERINGSFAGET. Måling av turtall og posisjon
 AUTOMATISERINGSFAGET Måling av turtall og posisjon Sist revidert: 11.04.2014 MODUL MÅLING AV TURTALL OG POSISJON Modulen har følgende innhold: Kompendium (dette dokumentet) Nettleksjon Nettoppgaver (inkludert
AUTOMATISERINGSFAGET Måling av turtall og posisjon Sist revidert: 11.04.2014 MODUL MÅLING AV TURTALL OG POSISJON Modulen har følgende innhold: Kompendium (dette dokumentet) Nettleksjon Nettoppgaver (inkludert
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS5. Likestrømmotor.
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS5 Likestrømmotor. Denne lab.øvelsen er en introduksjon til elektromotorer. Den tar sikte på å introdusere/repetere noen enkle mekaniske
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS5 Likestrømmotor. Denne lab.øvelsen er en introduksjon til elektromotorer. Den tar sikte på å introdusere/repetere noen enkle mekaniske
Analog til digital omforming
 Kurs: FYS3230 Sensorer og måleteknikk Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 2 Omhandler: Analog til digital omforming Studere noen D/A- og A/D- kretser Revidert, 27 sept. 06 T.Lindem Utført
Kurs: FYS3230 Sensorer og måleteknikk Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 2 Omhandler: Analog til digital omforming Studere noen D/A- og A/D- kretser Revidert, 27 sept. 06 T.Lindem Utført
Varsler om isdannelse i takrenne, nedløp eller på tak
 Varsler om isdannelse i takrenne, nedløp eller på tak GENERELT TR50 varsler om isdannelse og kan styre varmekabel slik at issamling hindres. Energiforbruket med denne vil bli mye lavere enn ved bruk av
Varsler om isdannelse i takrenne, nedløp eller på tak GENERELT TR50 varsler om isdannelse og kan styre varmekabel slik at issamling hindres. Energiforbruket med denne vil bli mye lavere enn ved bruk av
oppgaver fra abels hjørne i dagbladet
 oppgaver fra abels hjørne i dagbladet sett 4 dag 1 1. Hvor mange av de ett hundre første positive heltallene, 1, 2, 3,, 99, 100, er delelig med 2, 3, 4 og 5? A)0 B) 1 C) 2 D) 3 E) 4 2. Ett tusen terninger
oppgaver fra abels hjørne i dagbladet sett 4 dag 1 1. Hvor mange av de ett hundre første positive heltallene, 1, 2, 3,, 99, 100, er delelig med 2, 3, 4 og 5? A)0 B) 1 C) 2 D) 3 E) 4 2. Ett tusen terninger
Datakonvertering. analog til digital og digital til analog
 Datakonvertering analog til digital og digital til analog Komparator Signalspenningene ut fra en sensor kan variere sterkt. Hvis vi bare ønsker informasjon om når signal-nivået overstiger en bestemt terskelverdi
Datakonvertering analog til digital og digital til analog Komparator Signalspenningene ut fra en sensor kan variere sterkt. Hvis vi bare ønsker informasjon om når signal-nivået overstiger en bestemt terskelverdi
VEILEDNING TIL LABORATORIEØVELSE NR 8
 VEILEDNING TIL LABORATORIEØVELSE NR 8 «DIGITALVOLTMETER» FY-IN 204 Revidert utgave 98-03-05 Veiledning FY-IN 204 : Oppgave 8 8 Digital voltmeter Litteratur: Skjema på fig. 1, Millmann side 717-720 Oppgave:
VEILEDNING TIL LABORATORIEØVELSE NR 8 «DIGITALVOLTMETER» FY-IN 204 Revidert utgave 98-03-05 Veiledning FY-IN 204 : Oppgave 8 8 Digital voltmeter Litteratur: Skjema på fig. 1, Millmann side 717-720 Oppgave:
MIK 200 Anvendt signalbehandling, 2012. Lab. 5, brytere, lysdioder og logikk.
 Stavanger, 25. januar 2012 Det teknisknaturvitenskapelige fakultet MIK 200 Anvendt signalbehandling, 2012. Lab. 5, brytere, lysdioder og logikk. Vi skal i denne øvinga se litt på brytere, lysdioder og
Stavanger, 25. januar 2012 Det teknisknaturvitenskapelige fakultet MIK 200 Anvendt signalbehandling, 2012. Lab. 5, brytere, lysdioder og logikk. Vi skal i denne øvinga se litt på brytere, lysdioder og
Krefter, Newtons lover, dreiemoment
 Krefter, Newtons lover, dreiemoment Tor Nordam 13. september 2007 Krefter er vektorer En ting som beveger seg har en hastighet. Hastighet er en vektor, som vi vanligvis skriver v. Hastighetsvektoren har
Krefter, Newtons lover, dreiemoment Tor Nordam 13. september 2007 Krefter er vektorer En ting som beveger seg har en hastighet. Hastighet er en vektor, som vi vanligvis skriver v. Hastighetsvektoren har
HALVLEDER-DIODER Karakteristikker Målinger og simuleringer
 Kurs: FYS1210 Elektronikk med prosjektoppgaver Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 3 Omhandler: HALVLEDER-DIODER Karakteristikker Målinger og simuleringer Revidert utgave, desember 2014 (T.
Kurs: FYS1210 Elektronikk med prosjektoppgaver Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 3 Omhandler: HALVLEDER-DIODER Karakteristikker Målinger og simuleringer Revidert utgave, desember 2014 (T.
Tallinjen FRA A TIL Å
 Tallinjen FRA A TIL Å VEILEDER FOR FORELDRE MED BARN I 5. 7. KLASSE EMNER Side 1 Innledning til tallinjen T - 2 2 Grunnleggende om tallinjen T - 2 3 Hvordan vi kan bruke en tallinje T - 4 3.1 Tallinjen
Tallinjen FRA A TIL Å VEILEDER FOR FORELDRE MED BARN I 5. 7. KLASSE EMNER Side 1 Innledning til tallinjen T - 2 2 Grunnleggende om tallinjen T - 2 3 Hvordan vi kan bruke en tallinje T - 4 3.1 Tallinjen
Vann i rør Ford Fulkerson method
 Vann i rør Ford Fulkerson method Problemet Forestill deg at du har et nettverk av rør som kan transportere vann, og hvor rørene møtes i sammensveisede knytepunkter. Vannet pumpes inn i nettverket ved hjelp
Vann i rør Ford Fulkerson method Problemet Forestill deg at du har et nettverk av rør som kan transportere vann, og hvor rørene møtes i sammensveisede knytepunkter. Vannet pumpes inn i nettverket ved hjelp
DtC-Lenze as REGULERTE MOTORDRIFTER - AUTOMASJON
 LENZE KOMPAKTLIKERETTERE SERIE 470 OG 480 MONTASJE- OG BETJENINGSANVISNING Utgave 02. 01.12.04 JO REPRESENTANT I NORGE DtC-Lenze as REGULERTE MOTORDRIFTER - AUTOMASJON Stallbakken 5-2005 RÆLINGEN Tlf.
LENZE KOMPAKTLIKERETTERE SERIE 470 OG 480 MONTASJE- OG BETJENINGSANVISNING Utgave 02. 01.12.04 JO REPRESENTANT I NORGE DtC-Lenze as REGULERTE MOTORDRIFTER - AUTOMASJON Stallbakken 5-2005 RÆLINGEN Tlf.
FYS1210 Løsningsforslag. Eksamen V2015
 FYS1210 Løsningsforslag Eksamen V2015 Oppgave 1 1a) I første del av oppgaven skal vi se bort fra lasten, altså RL = 0. Vi velger arbeidspunkt til å være 6 Volt, altså halvparten av forskyningsspenningen.
FYS1210 Løsningsforslag Eksamen V2015 Oppgave 1 1a) I første del av oppgaven skal vi se bort fra lasten, altså RL = 0. Vi velger arbeidspunkt til å være 6 Volt, altså halvparten av forskyningsspenningen.
Den analoge verden blir digitalisert
 Den analoge verden blir digitalisert Lindem 4. mai 2008 Med bestemte tidsintervall går vi inn og avleser (digitaliserer) den analoge verdien til signalet. Nyquist Shannon sampling theorem: Skal vi beholde
Den analoge verden blir digitalisert Lindem 4. mai 2008 Med bestemte tidsintervall går vi inn og avleser (digitaliserer) den analoge verdien til signalet. Nyquist Shannon sampling theorem: Skal vi beholde
Oppgave Nr.og navn LABORATORIEØVELSE NR 6 Revidert utgave desember 2014 T. Lindem, K. Ø. Spildrejorde, M. Elvegård
 Kurs: FYS1210 Elektronikk med prosjektoppgaver Gruppe: Gruppe-dag: Oppgave Nr.og navn LABORATORIEØVELSE NR 6 Revidert utgave desember 2014 T. Lindem, K. Ø. Spildrejorde, M. Elvegård Omhandler: «KLOKKEGENERATOR
Kurs: FYS1210 Elektronikk med prosjektoppgaver Gruppe: Gruppe-dag: Oppgave Nr.og navn LABORATORIEØVELSE NR 6 Revidert utgave desember 2014 T. Lindem, K. Ø. Spildrejorde, M. Elvegård Omhandler: «KLOKKEGENERATOR
GeoGebra 4.2 for Sinus 2P. av Sigbjørn Hals
 GeoGebra 4.2 for Sinus 2P av Sigbjørn Hals Innhold Litt om GeoGebra... 3 Linjediagram. Side 46 i læreboka... 3 Søylediagram. Side 57 i Læreboka... 5 Histogram. Side 81 i læreboka... 6 Lineær regresjon.
GeoGebra 4.2 for Sinus 2P av Sigbjørn Hals Innhold Litt om GeoGebra... 3 Linjediagram. Side 46 i læreboka... 3 Søylediagram. Side 57 i Læreboka... 5 Histogram. Side 81 i læreboka... 6 Lineær regresjon.
Turny bladvender Brukerveiledning
 Turny bladvender Brukerveiledning Generelt om Turny elektronisk bladvender...2 Tilkobling av Turny...2 Installasjon...3 Montering av bok/tidsskrift...4 Bruk av Turny...4 Aktiviser vippefunksjonen...5 Mulige
Turny bladvender Brukerveiledning Generelt om Turny elektronisk bladvender...2 Tilkobling av Turny...2 Installasjon...3 Montering av bok/tidsskrift...4 Bruk av Turny...4 Aktiviser vippefunksjonen...5 Mulige
(12) PATENT (19) NO (11) 333443 (13) B1. (51) Int Cl. NORGE. Patentstyret
 PATENT (19) NO (11) 333443 (13) B1. (51) Int Cl. NORGE. Patentstyret") (12) PATENT (19) NO (11) 333443 (13) B1 NORGE (1) Int Cl. H02J 3/00 (06.01) H02J 3/34 (06.01) H02J 3/22 (06.01) Patentstyret (21) Søknadsnr 111448 (86) Int.inng.dag og søknadsnr (22) Inng.dag 11..26 (8)
(12) PATENT (19) NO (11) 333443 (13) B1 NORGE (1) Int Cl. H02J 3/00 (06.01) H02J 3/34 (06.01) H02J 3/22 (06.01) Patentstyret (21) Søknadsnr 111448 (86) Int.inng.dag og søknadsnr (22) Inng.dag 11..26 (8)
48 Praktisk reguleringsteknikk
 48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
48 Praktisk reguleringsteknikk Figur 2.18: Simulering av nivåreguleringssystemet for flistanken. Regulatoren er en PI-regulator. (Resten av frontpanelet for simulatoren er som vist i figur 2.14.) Kompenseringsegenskaper:
Termination circuit board. Figur 2: Termineringer (Ott: Noise reduction in electronic systems, second edition, s 58, 59).
.") Lab inf5460 Måling av opptak av støy i forskjellige kabler med varierende terminering. Oppsett 50kHz Function generator Figur 1: Oppsett Primary coil Secondary coil Termination circuit board Oscilloscope
Lab inf5460 Måling av opptak av støy i forskjellige kabler med varierende terminering. Oppsett 50kHz Function generator Figur 1: Oppsett Primary coil Secondary coil Termination circuit board Oscilloscope
Tips! OMRON ELECTRONICS NORWAY AS
 Dette dokumentet er ment som et supplement til de originale manualene for produktene. Benytt derfor dette som en hjelp til å bli kjent med produktet, og ikke som en oppskrift for en ferdig installasjon.
Dette dokumentet er ment som et supplement til de originale manualene for produktene. Benytt derfor dette som en hjelp til å bli kjent med produktet, og ikke som en oppskrift for en ferdig installasjon.
Dagens temaer. Dagens temaer er hentet fra P&P kapittel 3. Motivet for å bruke binær representasjon. Boolsk algebra: Definisjoner og regler
 Dagens temaer Dagens temaer er hentet fra P&P kapittel 3 Motivet for å bruke binær representasjon Boolsk algebra: Definisjoner og regler Kombinatorisk logikk Eksempler på byggeblokker 05.09.2003 INF 103
Dagens temaer Dagens temaer er hentet fra P&P kapittel 3 Motivet for å bruke binær representasjon Boolsk algebra: Definisjoner og regler Kombinatorisk logikk Eksempler på byggeblokker 05.09.2003 INF 103
Eneboerspillet del 2. Håvard Johnsbråten, januar 2014
 Eneboerspillet del 2 Håvard Johnsbråten, januar 2014 I Johnsbråten (2013) løste jeg noen problemer omkring eneboerspillet vha partall/oddetall. I denne parallellversjonen av artikkelen i vil jeg i stedet
Eneboerspillet del 2 Håvard Johnsbråten, januar 2014 I Johnsbråten (2013) løste jeg noen problemer omkring eneboerspillet vha partall/oddetall. I denne parallellversjonen av artikkelen i vil jeg i stedet
Datakonvertering. analog til digital og digital til analog
 Datakonvertering analog til digital og digital til analog Komparator Lindem 29.april. 2014 Signalspenningene ut fra en sensor kan variere sterkt. Hvis vi bare ønsker informasjon om når signal-nivået overstiger
Datakonvertering analog til digital og digital til analog Komparator Lindem 29.april. 2014 Signalspenningene ut fra en sensor kan variere sterkt. Hvis vi bare ønsker informasjon om når signal-nivået overstiger
FYS 2150.ØVELSE 15 POLARISASJON
 FYS 2150.ØVELSE 15 POLARISASJON Fysisk institutt, UiO 15.1 Polarisasjonsvektorene Vi skal i denne øvelsen studere lineært og sirkulært polarisert lys. En plan, lineært polarisert lysbølge beskrives ved
FYS 2150.ØVELSE 15 POLARISASJON Fysisk institutt, UiO 15.1 Polarisasjonsvektorene Vi skal i denne øvelsen studere lineært og sirkulært polarisert lys. En plan, lineært polarisert lysbølge beskrives ved
Sigbjørn Hals, Cappelen Damm Undervisning. Sinus 1P. Digitale løsninger av oppgaver og eksempler med noen utvalgte matematikkverktøy
 Sinus 1P Digitale løsninger av oppgaver og eksempler med noen utvalgte matematikkverktøy GeoGebra 4.0 og 4.2 wxmaxima Microsoft Mathematics WordMat TI-Nspire CAS 1 Innhold Litt om programmene... 4 GeoGebra
Sinus 1P Digitale løsninger av oppgaver og eksempler med noen utvalgte matematikkverktøy GeoGebra 4.0 og 4.2 wxmaxima Microsoft Mathematics WordMat TI-Nspire CAS 1 Innhold Litt om programmene... 4 GeoGebra
Laboratorieoppgave 8: Induksjon
 NTNU i Gjøvik Elektro Laboratorieoppgave 8: Induksjon Hensikt med oppgaven: Å forstå magnetisk induksjon og prinsipp for transformator Å forstå prinsippene for produksjon av elektrisk effekt fra en elektrisk
NTNU i Gjøvik Elektro Laboratorieoppgave 8: Induksjon Hensikt med oppgaven: Å forstå magnetisk induksjon og prinsipp for transformator Å forstå prinsippene for produksjon av elektrisk effekt fra en elektrisk
FDV-dokumentasjon fra Micro Matic Norge AS
 FDV-dokumentasjon fra Micro Matic Norge AS DIFFERANSETRYKK- OG LUFTMENGDEGIVER TYPE PTH-DF-3202 Art.navn: TRYKKGIVER M/DISP. 0-2500 PA, PTH-3202 DF-CK Art.nr.: OJ 1394 El.nr.: - EAN kode: 5703502550893
FDV-dokumentasjon fra Micro Matic Norge AS DIFFERANSETRYKK- OG LUFTMENGDEGIVER TYPE PTH-DF-3202 Art.navn: TRYKKGIVER M/DISP. 0-2500 PA, PTH-3202 DF-CK Art.nr.: OJ 1394 El.nr.: - EAN kode: 5703502550893
SafeLine VV3. Bruksanvisninger. Viser etasjer, piler og rullende tekstmeldinger.
 SafeLine VV3 Bruksanvisninger Viser etasjer, piler og rullende tekstmeldinger. SafeLine VV3 Bruksanvisninger safeline.eu Innhold Installering og testing Montering 5 Tegn på displayet 6 Volumkontroll 7
SafeLine VV3 Bruksanvisninger Viser etasjer, piler og rullende tekstmeldinger. SafeLine VV3 Bruksanvisninger safeline.eu Innhold Installering og testing Montering 5 Tegn på displayet 6 Volumkontroll 7
Informasjonsteori Skrevet av Joakim von Brandis, 18.09.2003
 Informasjonsteori Skrevet av Joakim von Brandis, 18.09.200 1 Bits og bytes Fundamentalt for informasjonsteori er at all informasjon (signaler, lyd, bilde, dokumenter, tekst, etc) kan representeres som
Informasjonsteori Skrevet av Joakim von Brandis, 18.09.200 1 Bits og bytes Fundamentalt for informasjonsteori er at all informasjon (signaler, lyd, bilde, dokumenter, tekst, etc) kan representeres som
Spørsmål og svar om GeoGebra, versjon 2.7 bokmål
 Spørsmål og svar om GeoGebra, versjon 2.7 bokmål Jeg har lastet ned en installasjonsfil fra www.geogebra.org og installert programmet, men får det ikke til å fungere. Hva kan dette skyldes? Den vanligste
Spørsmål og svar om GeoGebra, versjon 2.7 bokmål Jeg har lastet ned en installasjonsfil fra www.geogebra.org og installert programmet, men får det ikke til å fungere. Hva kan dette skyldes? Den vanligste
Optisk lesing av en lottokupong
 Høgskolen i Østfold Avdeling for informasjonsteknologi Fag IAD33506 Bildebehandling og mønstergjenkjenning Laboppgave nr 4 Optisk lesing av en lottokupong Halden 22.10.2012 17.10.12 Mindre revisjon Log
Høgskolen i Østfold Avdeling for informasjonsteknologi Fag IAD33506 Bildebehandling og mønstergjenkjenning Laboppgave nr 4 Optisk lesing av en lottokupong Halden 22.10.2012 17.10.12 Mindre revisjon Log
Del 1. Generelle tips
 Innhold Del 1. Generelle tips... 2 Bruk en "offline installer"... 2 Øk skriftstørrelsen... 3 Sett navn på koordinataksene... 3 Vis koordinater til skjæringspunkt, ekstremalpunkt m.m.... 4 Svar på spørsmålene
Innhold Del 1. Generelle tips... 2 Bruk en "offline installer"... 2 Øk skriftstørrelsen... 3 Sett navn på koordinataksene... 3 Vis koordinater til skjæringspunkt, ekstremalpunkt m.m.... 4 Svar på spørsmålene
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: OPPG.NR.: DS4E. FREKVENS OG SPRANGRESPONSANALYSE Med ELVIS
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.12 OPPG.NR.: DS4E FREKVENS OG SPRANGRESPONSANALYSE Med ELVIS BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 09.12 OPPG.NR.: DS4E FREKVENS OG SPRANGRESPONSANALYSE Med ELVIS BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser
Optisk lesing av en lottokupong
 Høgskolen i Østfold Avdeling for informasjonsteknologi Fag IAD33506 Bildebehandling og mønstergjenkjenning Laboppgave nr 4 Optisk lesing av en lottokupong Halden 20.10.2011 17.10.11 Mindre revisjon Log
Høgskolen i Østfold Avdeling for informasjonsteknologi Fag IAD33506 Bildebehandling og mønstergjenkjenning Laboppgave nr 4 Optisk lesing av en lottokupong Halden 20.10.2011 17.10.11 Mindre revisjon Log
Eivind, ED0 Ingeniørfaglig yrkesutøvelse og arbeidsmetoder Individuell fremføring
 Innledning og bakgrunn Denne teksten har som hensikt å forklare operasjonsforsterkerens virkemåte og fortelle om dens muligheter. Starten går ut på å fortelle kort om en del av operasjonsforsterkerens
Innledning og bakgrunn Denne teksten har som hensikt å forklare operasjonsforsterkerens virkemåte og fortelle om dens muligheter. Starten går ut på å fortelle kort om en del av operasjonsforsterkerens
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246
 ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
ØstCom Mobil Skyveport Feilsøking og Funksjonskontroll Motor BX-246 Komplett funksjonssjekk Figur 1 Figur 2 Figur 3 Åpne luken for manuell utløsning nede på motoren. Låsehaken på denne går gjennom ett
Fakultet for teknologi, kunst og design Teknologiske fag
 Fakultet for teknologi, kunst og design Teknologiske fag Ny og utsatt eksamen i: Elektronikk Målform: Bokmål Dato: 7. august 2013 Tid: 0900-1200 Antall sider (inkl. forside): 5 (inkludert Vedlegg 1 side)
Fakultet for teknologi, kunst og design Teknologiske fag Ny og utsatt eksamen i: Elektronikk Målform: Bokmål Dato: 7. august 2013 Tid: 0900-1200 Antall sider (inkl. forside): 5 (inkludert Vedlegg 1 side)
Matematikk i Bård Breiviks kunst
 Christoph Kirfel Matematikk i Bård Breiviks kunst Christoph Kirfel, Universitetet i Bergen christoph.kirfel@math.uib.no Avansert matematikk er til de grader til stede og nødvendig når mange av Bård Breiviks
Christoph Kirfel Matematikk i Bård Breiviks kunst Christoph Kirfel, Universitetet i Bergen christoph.kirfel@math.uib.no Avansert matematikk er til de grader til stede og nødvendig når mange av Bård Breiviks
Inngang A Inngang B Utgang A Utgang B. Måling med semistokastisk signal (MLS) Impulsrespons ved korrelering FFT (Spektralanalysator, Klirrmeter)
 Impulsrespons ved korrelering FFT (Spektralanalysator, Klirrmeter)") Inngang A Inngang B Utgang A Utgang B Innebygde funksjoner: Sinustesting Tonegenerator AC voltmeter Oscilloskop Svipgenerator Bodeplotter (AFF) Impedansmåling Måling av Thiele Small parametere Måling med
Inngang A Inngang B Utgang A Utgang B Innebygde funksjoner: Sinustesting Tonegenerator AC voltmeter Oscilloskop Svipgenerator Bodeplotter (AFF) Impedansmåling Måling av Thiele Small parametere Måling med
oppgaver fra abels hjørne i dagbladet
 oppgaver fra abels hjørne i dagbladet sett 9 dag 1 1. Kjetil og Øystein skal kjøre fra Stavanger til Oslo i hver sin bil. Kjetil starter først og holder en konstant fart på 75 km/t. Øystein starter en
oppgaver fra abels hjørne i dagbladet sett 9 dag 1 1. Kjetil og Øystein skal kjøre fra Stavanger til Oslo i hver sin bil. Kjetil starter først og holder en konstant fart på 75 km/t. Øystein starter en
Nr. 54/137 EØS-tillegget til De Europeiske Fellesskaps Tidende VEDLEGG IV
 Nr. 54/137 EØS-tillegget til De Europeiske Fellesskaps Tidende 23. 11. 2000 VEDLEGG IV GLØDELAMPER BEREGNET PÅ BRUK I TYPEGODKJENTE LYKTER FOR MOPEDER OG MOTOR- SYKLER MED TO OG TRE HJUL Tillegg 1 Glødelamper
Nr. 54/137 EØS-tillegget til De Europeiske Fellesskaps Tidende 23. 11. 2000 VEDLEGG IV GLØDELAMPER BEREGNET PÅ BRUK I TYPEGODKJENTE LYKTER FOR MOPEDER OG MOTOR- SYKLER MED TO OG TRE HJUL Tillegg 1 Glødelamper
INF1411 Obligatorisk oppgave nr. 3
 INF1411 Obligatorisk oppgave nr. 3 Fyll inn navn på alle som leverer sammen, 2 per gruppe (1 eller 3 i unntakstilfeller): 1 2 3 Informasjon og orientering I denne oppgaven skal du lære litt om operasjonsforsterkere
INF1411 Obligatorisk oppgave nr. 3 Fyll inn navn på alle som leverer sammen, 2 per gruppe (1 eller 3 i unntakstilfeller): 1 2 3 Informasjon og orientering I denne oppgaven skal du lære litt om operasjonsforsterkere
KYBERNETIKKLABORATORIET. FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING
 KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
KYBERNETIKKLABORATORIET FAG: Kybernetikk DATO: 01.13 OPPG. NR.: R134 TEMPERATURREGULERING Denne øvelsen inneholder følgende momenter: a) En prosess, styring av luft - temperatur, skal undersøkes, og en
Forelesning i SIB6005 Geomatikk, 30.9.2002. HoltEX
 1 Forelesning i SIB6005 Geomatikk, 30.9.2002 Geodesi/landmåling. 30.9 DAGENS TEMA: Gi bakgrunn for feltøvingen GPS: Planlegging HoltEX Tp343 Passpunkt Klassisk måling: Vinkel- og avstandsmåling Nytt pkt
1 Forelesning i SIB6005 Geomatikk, 30.9.2002 Geodesi/landmåling. 30.9 DAGENS TEMA: Gi bakgrunn for feltøvingen GPS: Planlegging HoltEX Tp343 Passpunkt Klassisk måling: Vinkel- og avstandsmåling Nytt pkt
EKSAMEN. Informasjon og publiseringsteknologi. INNFØRING MED PENN, evt. trykkblyant som gir gjennomslag
 KANDIDATNUMMER: EKSAMEN FAGNAVN: FAGNUMMER: Informasjon og publiseringsteknologi IMT1041 EKSAMENSDATO: 07.12.2005 SENSURFRIST: 28.12.2005 KLASSE: 05HBINFA, 05HBINDA/T, 05HBMEDA, 05HBMEMAA, 05HBMETEA TID:
KANDIDATNUMMER: EKSAMEN FAGNAVN: FAGNUMMER: Informasjon og publiseringsteknologi IMT1041 EKSAMENSDATO: 07.12.2005 SENSURFRIST: 28.12.2005 KLASSE: 05HBINFA, 05HBINDA/T, 05HBMEDA, 05HBMEMAA, 05HBMETEA TID:
Norm for Frimo H0e-moduler. 2009/1
 Norm for Frimo H0e-moduler. 2009/1 Frimo-normen er en forenkling og presisering av Fremo-Norge sitt normforslag for H0m og H0e moduler. Det er tre vesentlige forskjeller fra Fremo-Norge sin norm. Først
Norm for Frimo H0e-moduler. 2009/1 Frimo-normen er en forenkling og presisering av Fremo-Norge sitt normforslag for H0m og H0e moduler. Det er tre vesentlige forskjeller fra Fremo-Norge sin norm. Først
STYRINGSAUTOMATIKK FOR SNØSMELTEANLEGG I BAKKE Brukermanual ISFRI 60, revisjon AJ september 2015 (NOR-IDE as, http://www.nor-ide.
 STYRINGSAUTOMATIKK FOR SNØSMELTEANLEGG I BAKKE, revisjon AJ september 2015 (NOR-IDE as, http://www.nor-ide.no) http://micromatic.no 1 Side 2/12 INNHOLD BRUKSOMRÅDE... 2 INSTALLASJON... 2 KONTROLLENHET...
STYRINGSAUTOMATIKK FOR SNØSMELTEANLEGG I BAKKE, revisjon AJ september 2015 (NOR-IDE as, http://www.nor-ide.no) http://micromatic.no 1 Side 2/12 INNHOLD BRUKSOMRÅDE... 2 INSTALLASJON... 2 KONTROLLENHET...
ENC - 100. ENKEL AKSE og KLIPPE LENGDE KONTROLLER for PLATESAKSER
 ENC - 100 ENKEL AKSE og KLIPPE LENGDE KONTROLLER for PLATESAKSER 1. GENERELLE SPESIFIKASJONER Membran tastatur med lang levetid. Klart og lett lesbart display. Viser hver av de 6 sifrene for aktuell og
ENC - 100 ENKEL AKSE og KLIPPE LENGDE KONTROLLER for PLATESAKSER 1. GENERELLE SPESIFIKASJONER Membran tastatur med lang levetid. Klart og lett lesbart display. Viser hver av de 6 sifrene for aktuell og
1.7 Digitale hjelpemidler i geometri
 1.7 Digitale hjelpemidler i geometri Geometri handler om egenskapene til punkter, linjer og figurer i planet og i rommet. I alle tider har blyant og papir samt passer og linjal vært de viktigst hjelpemidlene
1.7 Digitale hjelpemidler i geometri Geometri handler om egenskapene til punkter, linjer og figurer i planet og i rommet. I alle tider har blyant og papir samt passer og linjal vært de viktigst hjelpemidlene
EKSAMEN Emnekode: ITD13012
 EKSAMEN Emnekode: ITD13012 Dato: 29.11.2017 Hjelpemidler: To (2) A4-ark (fire sider) med egne notater. HIØ-kalkulator som kan lånes under eksamen. Emnenavn: Datateknikk Eksamenstid: 3 timer Faglærer: Robert
EKSAMEN Emnekode: ITD13012 Dato: 29.11.2017 Hjelpemidler: To (2) A4-ark (fire sider) med egne notater. HIØ-kalkulator som kan lånes under eksamen. Emnenavn: Datateknikk Eksamenstid: 3 timer Faglærer: Robert
Teori om preferanser (en person), samfunnsmessig velferd (flere personer) og frikonkurranse
, samfunnsmessig velferd (flere personer) og frikonkurranse") Teori om preferanser (en person), samfunnsmessig velferd (flere personer) og frikonkurranse Flere grunner til å se på denne teorien tidlig i kurset De neste gangene skal vi bl.a. se på hva slags kontrakter
Teori om preferanser (en person), samfunnsmessig velferd (flere personer) og frikonkurranse Flere grunner til å se på denne teorien tidlig i kurset De neste gangene skal vi bl.a. se på hva slags kontrakter
AVDELING FOR INGENIØRUTDANNING EKSAMENSOPPGAVE
 AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgaven består av: ybernetikk I 2E Antall sider (inkl. forsiden): Emnekode: SO 318E Dato: Antall oppgaver: 6 Faglig veileder: Veslemøy
AVDELING FOR INGENIØRUTDANNING ESAMENSOPPGAVE Emne: Gruppe(r): Eksamensoppgaven består av: ybernetikk I 2E Antall sider (inkl. forsiden): Emnekode: SO 318E Dato: Antall oppgaver: 6 Faglig veileder: Veslemøy
Temperaturer: Verdiene som legges inn under Temperaturer er avgjørende for at resultatet ved å bruke programmet kan ansees som riktig.
 Normtallsverdier: Verdiene som legges inn under Normtall er avgjørende for at resultatet ved å bruke programmet kan ansees som riktig. Normtallsverdiene er unike for hver enkelt bygg. Likevel blir det
Normtallsverdier: Verdiene som legges inn under Normtall er avgjørende for at resultatet ved å bruke programmet kan ansees som riktig. Normtallsverdiene er unike for hver enkelt bygg. Likevel blir det
Sammendrag kapittel 9 - Geometri
 Sammendrag kapittel 9 - Geometri Absolutt vinkelmål (radianer) Det absolutte vinkelmålet til en vinkel v, er folholdet mellom buelengden b, og radien r. Buelengde v = b r Med v i radianer! b = r v Omregning
Sammendrag kapittel 9 - Geometri Absolutt vinkelmål (radianer) Det absolutte vinkelmålet til en vinkel v, er folholdet mellom buelengden b, og radien r. Buelengde v = b r Med v i radianer! b = r v Omregning
GeoGebra-opplæring i Matematikk 2P
 GeoGebra-opplæring i Matematikk 2P Emne Underkapittel Graftegning 2.1 Linje gjennom to punkter 2.1 Å finne y- og x-verdier 2.1 Lineær regresjon 2.3 Andregradsfunksjoner 2.4 Polynomregresjon 2.4 Eksponential-
GeoGebra-opplæring i Matematikk 2P Emne Underkapittel Graftegning 2.1 Linje gjennom to punkter 2.1 Å finne y- og x-verdier 2.1 Lineær regresjon 2.3 Andregradsfunksjoner 2.4 Polynomregresjon 2.4 Eksponential-
AutroBeam 100. Installasjon- og igangkjøringshåndbok. Linjedetektor. Vi verner liv, miljø og verdier...
 AutroBeam 100 Linjedetektor Installasjon- og igangkjøringshåndbok Vi verner liv, miljø og verdier... P-AB100/DN - Rev. D, 020214 1 Autronica P-AB100/CN- ire and Security Rev. ASD Tx AutroBeam 100 Rx AutroBeam
AutroBeam 100 Linjedetektor Installasjon- og igangkjøringshåndbok Vi verner liv, miljø og verdier... P-AB100/DN - Rev. D, 020214 1 Autronica P-AB100/CN- ire and Security Rev. ASD Tx AutroBeam 100 Rx AutroBeam
Oppfinnelsens område. Bakgrunn for oppfinnelsen
 1 Oppfinnelsens område Oppfinnelsen vedrører smelting av metall i en metallsmelteovn for støping. Oppfinnelsen er nyttig ved smelting av flere metaller og er særlig nyttig ved smelting av aluminium. Bakgrunn
1 Oppfinnelsens område Oppfinnelsen vedrører smelting av metall i en metallsmelteovn for støping. Oppfinnelsen er nyttig ved smelting av flere metaller og er særlig nyttig ved smelting av aluminium. Bakgrunn
EGM-100A SERVOMOTOR. Vær oppmerksom!
 BLÅ EGM-100A SERVOMOTOR Vær oppmerksom! Spjeldmotoren EGM-100A MÅ ALDRI ÅPNES OPP. Skjønt at det er mulig å justere grensebryterne til EGM-100A på fremsiden, er det ikke tillatt å prøve å reparere justeringsknappen
BLÅ EGM-100A SERVOMOTOR Vær oppmerksom! Spjeldmotoren EGM-100A MÅ ALDRI ÅPNES OPP. Skjønt at det er mulig å justere grensebryterne til EGM-100A på fremsiden, er det ikke tillatt å prøve å reparere justeringsknappen
~ 122 I SI 1225"1 BRUKSANVISNING FOR HBM. MGT 231 DC-MALEBRO MED DA 24 DIGITALINDlKATOR HBM MGT 231
 ~ 122 I SI 1225"1 1 BRUKSANVISNING FOR HBM o MGT 21 DC-MALEBRO MED DA 24 DIGITALINDlKATOR HBM MGT 21 2 INNHOLDSFORTEGNELSE Side 1. Generelt 2. Tilkopling av f0lere. Analogt utgangssignal 4. Digitalindikatoren
~ 122 I SI 1225"1 1 BRUKSANVISNING FOR HBM o MGT 21 DC-MALEBRO MED DA 24 DIGITALINDlKATOR HBM MGT 21 2 INNHOLDSFORTEGNELSE Side 1. Generelt 2. Tilkopling av f0lere. Analogt utgangssignal 4. Digitalindikatoren
Laboratorieoppgave 3: Motstandsnettverk og innføring i Oscilloskop
 NTNU i Gjøvik Elektro Laboratorieoppgave 3: Motstandsnettverk og innføring i Oscilloskop Denne oppgaven består av to deler. Del 1 omhandler motstandsnettverk for digital til analog omsetning. Del 2 omhandler
NTNU i Gjøvik Elektro Laboratorieoppgave 3: Motstandsnettverk og innføring i Oscilloskop Denne oppgaven består av to deler. Del 1 omhandler motstandsnettverk for digital til analog omsetning. Del 2 omhandler
Fredrikstadgruppen av NRRL, Postboks 208, 1601 Fredrikstad Kurs for radioamatører ved LA6PB
 Oppgaver fra Radioamatørens ABC, kapittel 3.9 Senderteknikk: 1. En oscillator består av endel komponenter. Hvilke er de tre viktigste? A: Motstand, kondensator og spole B: Kondensator, spole og transistor/radiorør
Oppgaver fra Radioamatørens ABC, kapittel 3.9 Senderteknikk: 1. En oscillator består av endel komponenter. Hvilke er de tre viktigste? A: Motstand, kondensator og spole B: Kondensator, spole og transistor/radiorør
Forslag B til løsning på eksamen FYS august 2004
 Forslag B til løsning på eksamen FYS20 3 august 2004 Oppgave (Sweeper frekvensområdet 00Hz til 0MHz Figur viser et båndpassfilter. Motstandene R og R2 har verdi 2kΩ. Kondensatorene C = 00nF og C2 = 0.nF.
Forslag B til løsning på eksamen FYS20 3 august 2004 Oppgave (Sweeper frekvensområdet 00Hz til 0MHz Figur viser et båndpassfilter. Motstandene R og R2 har verdi 2kΩ. Kondensatorene C = 00nF og C2 = 0.nF.
Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birgger Vennesland
 Sluttrapport Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birger Vennesland Innledning For taubaner med to liner i løpende bærekabelsystem
Sluttrapport Ny løpekatt for to liner med utkjørbar heiseline TL1000 Løpekatt Halvor Torgersen Bruce Talbot Morten Nitteberg Birger Vennesland Innledning For taubaner med to liner i løpende bærekabelsystem
Eksamen i Elektronikk 24. Mai Løsningsforslag Knut Harald Nygaard
 Eksamen i Elektronikk 24. Mai 2017 Løsningsforslag Knut Harald Nygaard Oppgave 1 Operasjonsforsterkeren i kretsløpet i figuren nedenfor kan regnes som ideell. v inn R C v ut a) Overføringsfunksjonen er
Eksamen i Elektronikk 24. Mai 2017 Løsningsforslag Knut Harald Nygaard Oppgave 1 Operasjonsforsterkeren i kretsløpet i figuren nedenfor kan regnes som ideell. v inn R C v ut a) Overføringsfunksjonen er
Digital promille tester CA2010. Brukerveiledning. TT Micro AS Side 1
 Digital promille tester CA2010 Brukerveiledning TT Micro AS Side 1 ... 32 Innholdsfortegnelse Innhold i pakken Produkt Forholdsregler... oversikt Skjerm... informasjon Brukerveiledning 4 Feilmeldinger
Digital promille tester CA2010 Brukerveiledning TT Micro AS Side 1 ... 32 Innholdsfortegnelse Innhold i pakken Produkt Forholdsregler... oversikt Skjerm... informasjon Brukerveiledning 4 Feilmeldinger
ORIENTERING OM LABORATORIEØVELSER I FYS1210
 ORIENTERING OM LABORATORIEØVELSER I FYS1210 Målsetting Laboratorieøvelsene skal supplere forelesningene ved å illustrere viktige prinsipper i elektronikken - både for digitale og analoge kretser. De skal
ORIENTERING OM LABORATORIEØVELSER I FYS1210 Målsetting Laboratorieøvelsene skal supplere forelesningene ved å illustrere viktige prinsipper i elektronikken - både for digitale og analoge kretser. De skal
KYBERNETIKKLABORATORIET. FAG: Dynamiske systemer DATO: OPPG.NR.: DS4 FREKVENS OG SPRANGRESPONSANALYSE
 KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS4 FREKVENS OG SPRANGRESPONSANALYSE BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser og forklarende
KYBERNETIKKLABORATORIET FAG: Dynamiske systemer DATO: 08.14 OPPG.NR.: DS4 FREKVENS OG SPRANGRESPONSANALYSE BESVARELSE: Protokollen skal besvare alle spørsmål. Diagrammene skal ha definerte akser og forklarende
Funksjoner og andregradsuttrykk
 88 4 Funksjoner og andregradsuttrykk Mål for opplæringen er at eleven skal kunne bruke matematiske metoder og hjelpemidler til å løse problemer fra ulike fag og samfunnsområder løse likninger, ulikheter
88 4 Funksjoner og andregradsuttrykk Mål for opplæringen er at eleven skal kunne bruke matematiske metoder og hjelpemidler til å løse problemer fra ulike fag og samfunnsområder løse likninger, ulikheter
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi
 HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Kandidatnr: Eksamensdato: 13.desember 2013 Varighet/eksamenstid: 09.00-12.00 Emnekode: Emnenavn: Klasse: EDT208T-A Programmerbare logiske styringer 3EK
HØGSKOLEN I SØR-TRØNDELAG Avdeling for teknologi Kandidatnr: Eksamensdato: 13.desember 2013 Varighet/eksamenstid: 09.00-12.00 Emnekode: Emnenavn: Klasse: EDT208T-A Programmerbare logiske styringer 3EK
Fjæra i a) kobles sammen med massen m = 100 [kg] og et dempeledd med dempningskoeffisient b til en harmonisk oscillator.
![Fjæra i a) kobles sammen med massen m = 100 [kg] og et dempeledd med dempningskoeffisient b til en harmonisk oscillator.](/thumbs/34/17139427.jpg "Fjæra i a) kobles sammen med massen m = 100 [kg] og et dempeledd med dempningskoeffisient b til en harmonisk oscillator.") Oppgave 1 a) Ei ideell fjær har fjærkonstant k = 2.60 10 3 [N/m]. Finn hvilken kraft en må bruke for å trykke sammen denne fjæra 0.15 [m]. Fjæra i a) kobles sammen med massen m = 100 [kg] og et dempeledd
Oppgave 1 a) Ei ideell fjær har fjærkonstant k = 2.60 10 3 [N/m]. Finn hvilken kraft en må bruke for å trykke sammen denne fjæra 0.15 [m]. Fjæra i a) kobles sammen med massen m = 100 [kg] og et dempeledd
1 Sikkerhetsinformasjon. 2 Apparatets oppbygning. Universal-seriedimmerinnsats. Universal-seriedimmerinnsats. Best.nr. : 2263 00.
 Universal-seriedimmerinnsats Best.nr. : 2263 00 Bruksanvisning 1 Sikkerhetsinformasjon Montering og innbygging av elektriske apparater må kun gjennomføres av autoriserte elektrikere. Fare for alvorlige
Universal-seriedimmerinnsats Best.nr. : 2263 00 Bruksanvisning 1 Sikkerhetsinformasjon Montering og innbygging av elektriske apparater må kun gjennomføres av autoriserte elektrikere. Fare for alvorlige
Kapittel 3: Litt om representasjon av tall
 MAT1030 Diskret Matematikk Forelesning 3: Litt om representasjon av tall, logikk Roger Antonsen Institutt for informatikk, Universitetet i Oslo Kapittel 3: Litt om representasjon av tall 20. januar 2009
MAT1030 Diskret Matematikk Forelesning 3: Litt om representasjon av tall, logikk Roger Antonsen Institutt for informatikk, Universitetet i Oslo Kapittel 3: Litt om representasjon av tall 20. januar 2009
Enkle logiske kretser Vi ser på DTL (Diode Transistor Logikk) og 74LSxx (Low Power Schottky logikk)
 og 74LSxx (Low Power Schottky logikk)") Kurs: FYS1210 Elektronikk med prosjektoppgaver Gruppe: Gruppe-dag: Oppgave: Omhandler: LABORATORIEOPPGAVE NR 5 Revidert desember 2014 T. Lindem, K. Ø. Spildrejorde, M. Elvegård Enkle logiske kretser Vi
Kurs: FYS1210 Elektronikk med prosjektoppgaver Gruppe: Gruppe-dag: Oppgave: Omhandler: LABORATORIEOPPGAVE NR 5 Revidert desember 2014 T. Lindem, K. Ø. Spildrejorde, M. Elvegård Enkle logiske kretser Vi
«OPERASJONSFORSTERKERE»
 Kurs: FYS 1210 Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 7 Revidert utgave, desember 2014 (T. Lindem, K.Ø. Spildrejorde, M. Elvegård) Omhandler: «OPERASJONSFORSTERKERE» FORSTERKER MED TILBAKEKOBLING
Kurs: FYS 1210 Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 7 Revidert utgave, desember 2014 (T. Lindem, K.Ø. Spildrejorde, M. Elvegård) Omhandler: «OPERASJONSFORSTERKERE» FORSTERKER MED TILBAKEKOBLING
EMAR2101 Reguleringssystemer 1: Øving 3
 Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Øving 3 Oppgave 1 I underkapittel 1.1 i læreboken er det listet opp syv forskjellige formål for reguleringsteknikken,
Høgskolen i Buskerud Finn Haugen (finn.haugen@hibu.no) 6.10 2008 EMAR2101 Reguleringssystemer 1: Øving 3 Oppgave 1 I underkapittel 1.1 i læreboken er det listet opp syv forskjellige formål for reguleringsteknikken,
monteringsanvisning Hyttedusj 80 x 80
 monteringsanvisning Hyttedusj 80 x 80 - med fotpumpe og tank - med 12V pumpe og tank Hyttedusj 80 x 80 Delepakker Monteringsanvisningen for disse dusjene består av to deler: 1-1 1-2 1-3 Del 1 Tar for seg
monteringsanvisning Hyttedusj 80 x 80 - med fotpumpe og tank - med 12V pumpe og tank Hyttedusj 80 x 80 Delepakker Monteringsanvisningen for disse dusjene består av to deler: 1-1 1-2 1-3 Del 1 Tar for seg
Løsningsforslag til EKSAMEN
 Løsningsforslag til EKSAMEN Emnekode: ITD006 Emne: Fysikk og datateknikk Dato: 09. Mai 007 Eksamenstid: kl 9:00 til kl :00 Hjelpemidler: 4 sider (A4) ( ark) med egne notater. Kalkulator. Gruppebesvarelse,
Løsningsforslag til EKSAMEN Emnekode: ITD006 Emne: Fysikk og datateknikk Dato: 09. Mai 007 Eksamenstid: kl 9:00 til kl :00 Hjelpemidler: 4 sider (A4) ( ark) med egne notater. Kalkulator. Gruppebesvarelse,
TFE4101 Vår 2016. Løsningsforslag Øving 3. 1 Teorispørsmål. (20 poeng)
") TFE411 Vår 216 Norges teknisk naturvitenskapelige universitet Institutt for elektronikk og telekommunikasjon Løsningsforslag Øving 3 1 Teorispørsmål. (2 poeng) a) Beskriv følgende med egne ord: Nodespenningsmetoden.
TFE411 Vår 216 Norges teknisk naturvitenskapelige universitet Institutt for elektronikk og telekommunikasjon Løsningsforslag Øving 3 1 Teorispørsmål. (2 poeng) a) Beskriv følgende med egne ord: Nodespenningsmetoden.
Forelesning nr.11 INF 1411 Elektroniske systemer
 Forelesning nr.11 INF 1411 Elektroniske systemer Operasjonsforsterkere 1 Dagens temaer Ideel operasjonsforsterker Operasjonsforsterker-karakteristikker Differensiell forsterker Opamp-kretser Dagens temaer
Forelesning nr.11 INF 1411 Elektroniske systemer Operasjonsforsterkere 1 Dagens temaer Ideel operasjonsforsterker Operasjonsforsterker-karakteristikker Differensiell forsterker Opamp-kretser Dagens temaer
Freestanding Monteringsanvisninger. Tips for å komme i gang
 Monteringsanvisninger Tips for å komme i gang et er best å være to personer ved montering av en løsning på over to meter. Vær oppmerksom på at alle løsninger som skal stå ut fra veggen, skal ha føtter
Monteringsanvisninger Tips for å komme i gang et er best å være to personer ved montering av en løsning på over to meter. Vær oppmerksom på at alle løsninger som skal stå ut fra veggen, skal ha føtter
Løsning eksamen 2P våren 2010
 Løsning eksamen 2P våren 2010 Oppgave 1 a) Prisen for diesel er 10,91 kr. Hvis Liv hadde fylte diesel, hadde prisen for 41,5 l vært mindre enn 11 kr 42 = 462 kr Det stemmer ikke i det hun betalte 509,
Løsning eksamen 2P våren 2010 Oppgave 1 a) Prisen for diesel er 10,91 kr. Hvis Liv hadde fylte diesel, hadde prisen for 41,5 l vært mindre enn 11 kr 42 = 462 kr Det stemmer ikke i det hun betalte 509,
Forelesning nr.4 INF 1411 Elektroniske systemer
 Forelesning nr.4 INF 1411 Elektroniske systemer Vekselstrøm Kondensatorer 1 Dagens temaer Sinusformede spenninger og strømmer Firkant-, puls- og sagtannsbølger Effekt i vekselstrømkretser Kondesator Oppbygging,
Forelesning nr.4 INF 1411 Elektroniske systemer Vekselstrøm Kondensatorer 1 Dagens temaer Sinusformede spenninger og strømmer Firkant-, puls- og sagtannsbølger Effekt i vekselstrømkretser Kondesator Oppbygging,
NB! Les bruksanvisningen nøye før stolen tas i bruk!
 NB! Les bruksanvisningen nøye før stolen tas i bruk! Arctic løftestoler er testet og godkjent i henhold til følgende krav og standarder: EN 12182 EN 1021-1 EN 13751 EN 1021-2 EN 1728 EN 1022 EN 60601-1
NB! Les bruksanvisningen nøye før stolen tas i bruk! Arctic løftestoler er testet og godkjent i henhold til følgende krav og standarder: EN 12182 EN 1021-1 EN 13751 EN 1021-2 EN 1728 EN 1022 EN 60601-1
Geometri Verktøylinja i GeoGebra Konstruksjon / tegning Konstruksjonsforklaring Normaler, paralleller og vinkler Mangekant, areal og omkrets
 2 Geometri Verktøylinja i GeoGebra Konstruksjon / tegning Konstruksjonsforklaring Normaler, paralleller og vinkler Mangekant, areal og omkrets Eksamensoppgaver 0 Innholdsfortegnelse INTRODUKSJON GEOGEBRA...
2 Geometri Verktøylinja i GeoGebra Konstruksjon / tegning Konstruksjonsforklaring Normaler, paralleller og vinkler Mangekant, areal og omkrets Eksamensoppgaver 0 Innholdsfortegnelse INTRODUKSJON GEOGEBRA...
Studere en Phase Locked Loop IC - NE565
 Kurs: FYS3230 Sensorer og måleteknikk Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 5 Omhandler: Studere en Phase Locked Loop IC - NE565 Frekvensmodulert sender Mottager for Frequency Shift Keying
Kurs: FYS3230 Sensorer og måleteknikk Gruppe: Gruppe-dag: Oppgave: LABORATORIEØVELSE NR 5 Omhandler: Studere en Phase Locked Loop IC - NE565 Frekvensmodulert sender Mottager for Frequency Shift Keying
UNIVERSITETET I OSLO
 UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1411 Introduksjon til elektroniske systemer Eksamensdag: 1. juni 2015 Tid for eksamen: 4 timer Oppgavesettet er på 5 sider
UNIVERSITETET I OSLO Det matematisk-naturvitenskapelige fakultet Eksamen i: INF1411 Introduksjon til elektroniske systemer Eksamensdag: 1. juni 2015 Tid for eksamen: 4 timer Oppgavesettet er på 5 sider
INSTALLASJONSmanual IB4. Impulsrelé for gruppestyring av fire motorer
 NO 061110 Ref: IB4_im1822039_no.pdf INSTALLASJONSmanual Art.nr: 1822039 IB4 Impulsrelé for gruppestyring av fire motorer Med IB4 gruppestyres 4 x 230 V AC motorer manuelt samtidig som motorene tar imot
NO 061110 Ref: IB4_im1822039_no.pdf INSTALLASJONSmanual Art.nr: 1822039 IB4 Impulsrelé for gruppestyring av fire motorer Med IB4 gruppestyres 4 x 230 V AC motorer manuelt samtidig som motorene tar imot
Monteringsveiledning. Handy Porten
 Forberedelse Forberedelses side 1) Sjekk at du har alt verktøy som du trenger. 2) Deleliste 3) Viktige mål før montering Installasjon av porten 4) Forberede bunnelementet før monteringen starter 5) Montering
Forberedelse Forberedelses side 1) Sjekk at du har alt verktøy som du trenger. 2) Deleliste 3) Viktige mål før montering Installasjon av porten 4) Forberede bunnelementet før monteringen starter 5) Montering
Elektrisk og Magnetisk felt
 Elektrisk og Magnetisk felt Kjetil Liestøl Nielsen 1 Emner for i dag Coulombs lov Elektrisk felt Ladet partikkel i elektrisk felt Magnetisk felt Magnetisk kraft på elektrisk eladninger Elektromagnetiske
Elektrisk og Magnetisk felt Kjetil Liestøl Nielsen 1 Emner for i dag Coulombs lov Elektrisk felt Ladet partikkel i elektrisk felt Magnetisk felt Magnetisk kraft på elektrisk eladninger Elektromagnetiske
Sentry. Brukerhåndbok. Bo Jo Tveter AS. Akersbakken 12 A, 0172 Oslo Norge ! 23 32 75 00! 23 32 75 01
 Sentry Brukerhåndbok Bo Jo Tveter AS. Akersbakken 12 A, 0172 Oslo Norge! 23 32 75 00! 23 32 75 01 e-post: post@bojo.no http://www.bojo.no versjon 0503 INNHOLDSFORTEGNELSE INNHOLDSFORTEGNELSE 2 1 Generelt
Sentry Brukerhåndbok Bo Jo Tveter AS. Akersbakken 12 A, 0172 Oslo Norge! 23 32 75 00! 23 32 75 01 e-post: post@bojo.no http://www.bojo.no versjon 0503 INNHOLDSFORTEGNELSE INNHOLDSFORTEGNELSE 2 1 Generelt
Kraftelektronikk (Elkraft 2 høst), øvingssett 3, høst 2005
, øvingssett 3, høst 2005") Kraftelektronikk (Elkraft 2 høst), øvingssett 3, høst 2005 OleMorten Midtgård HiA 2005 Ingen innlevering. Det gis veiledning uke 43, 44, 45 og ved behov. Oppgave 1 Gjør oppgavene fra notatet Introduction
Kraftelektronikk (Elkraft 2 høst), øvingssett 3, høst 2005 OleMorten Midtgård HiA 2005 Ingen innlevering. Det gis veiledning uke 43, 44, 45 og ved behov. Oppgave 1 Gjør oppgavene fra notatet Introduction